


Dzień dobry, dziś chcę podzielić się instrukcjami na temat tworzenia czołgu. Istnieją dwie opcje dla kontrolera wewnętrznego: ESP-8266 i Arduino Pro Mini. W pierwszej wersji sterowanie odbywa się za pośrednictwem komunikacji Wi-Fi. W drugim - pilot na podczerwień. Wykonany na podstawie TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), jest napędzany przez Tamiya 70097 Twin-Motor Gearbox Kit i silniki, które zostały dostarczone ze skrzynią biegów.
Będziemy potrzebować:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- klej modelowy (na przykład cement TAMIYA)
- Tamiya 70097 Twin-Motor Gearbox Kit
- ESP 8266-12E lub Arduino Pro Mini 8MHz 3,3 V.
- stabilizator napięcia AMS 1117 3,3 V 8000 mA (jeśli opcja z ESP 8266-12E)
- Sterownik silnika Qifei L9110
- kondensator 10v 1000uF
- dwukolorowa (czerwona, zielona) dioda LED
- niebieska dioda LED
- 2 czerwone diody LED
- odbiornik IR
- fotorezystor
- 2 przegrody na 2 baterie AAA lub 4 baterie AAA 1,2 V 1000 mA NI-MN
- 2 rezystory 2 omy
- 4 rezystory 75 omów
- 6 rezystorów 10 kOhm (jeśli opcja z ESP 8266-12E)
- przycisk
- fotorezystor
- USB - TTL
- lutownica
- druty w wielu kolorach
Krok 1 Obudowa i mechanika.
Najpierw musisz zebrać model TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Przyklejamy dolną część zgodnie z instrukcją, z wyjątkiem części zakrywających otwory wylotowe wałków skrzyni biegów. Wiodące gwiazdy też się nie trzymają. Przyklej górną część zgodnie z instrukcją bez zmian. Po sklejeniu tego wszystkiego pozostaw do wyschnięcia i przejdź do odbioru skrzyni biegów. Jak widać z instrukcji, Tamiya 70097 można zmontować w dwóch różnych wersjach.
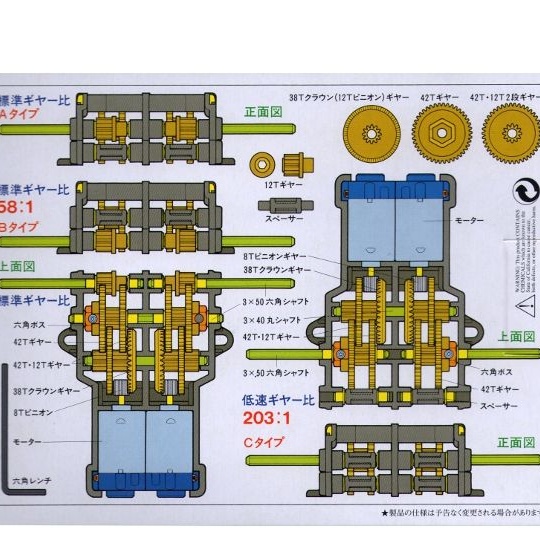
Pierwsza opcja z przełożeniem 58: 1, druga - 203: 1. Potrzebujemy pierwszej opcji. Również tutaj nie jest to takie proste. W takim przypadku moc wyjściowa osi może znajdować się bliżej dolnej części skrzyni biegów lub pośrodku. Siekiery należy wydychać do środkowego otworu! Po zmontowaniu skrzyni biegów przystępujemy do zainstalowania jej w modelu. Teoretycznie wszystko powinno być proste, ponieważ zarówno model, jak i skrzynia biegów jednej firmy. W praktyce - tam trzeba było wcisnąć skrzynię biegów. W pozycji poziomej skrzyni biegów wałki kół napędowych wybrzuszały się w górę, więc musiałem przeciąć metalową płytkę, co umożliwiło zamocowanie skrzyni biegów w żądanej pozycji.

Osie skrzyni biegów będą musiały zostać przycięte o 3 mm. Następnie przyklej do nich koła napędowe.

W górnej części bliżej tyłu wykonujemy otwory na dwukolorową diodę LED i odbiornik podczerwieni.

Bliżej przodu znajduje się otwór na niebieską diodę LED, która będzie służyć jako latarka.

I wewnątrz luku - na fotorezystor.

Na odwrocie przyklej czerwone diody LED do oświetlenia.

Do wszystkich powyższych należy lutować przewody. Bardziej wygodne jest to zrobić przed instalacją.
Krok 2 Elektryk
Tutaj przedstawię wybór opcji do dalszego montażu.
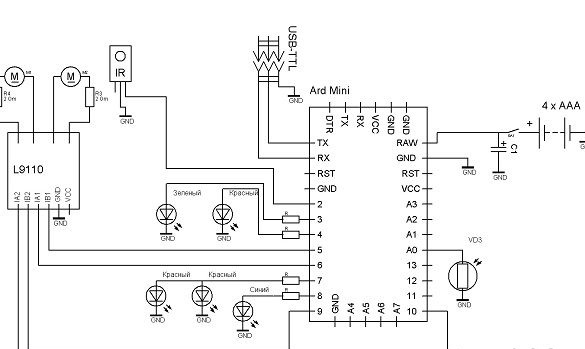
Jeśli wybrałeś ESP 8266. Wbudowany moduł Wi-Fi znacznie ułatwia proces kontroli i połączenia.Można go łatwo zaprogramować w Arduino IDE. Najlepiej wybrać moduł z 4 Mb pamięci. W takim przypadku konieczne jest zebranie minimalnej uprzęży do uruchomienia i flashowania ESP-8266. Tylko pin VCC jest podłączony bezpośrednio do zasilacza, pozostałe piny: CH_PD, RESET, GPIO0, GPIO2, muszą być przeciągnięte do zasilacza (VCC) przez rezystor. Rezystory 10kOm można wymienić na inne, od 4,7kOm do 50kOm, z wyjątkiem GPIO15 - jego wartość musi wynosić do 10k. Bezpośrednio, do minus (GND) zasilacza, podłączamy tylko GND, a także przeciągamy GPIOO przez rezystor do 10kOm, aby wprowadzić moduł w tryb pobierania oprogramowania układowego, do GND. Przycisk jest potrzebny do ponownego uruchomienia i flashowania modułu. Złącze USB-TTL - do oprogramowania układowego.
Oto schemat
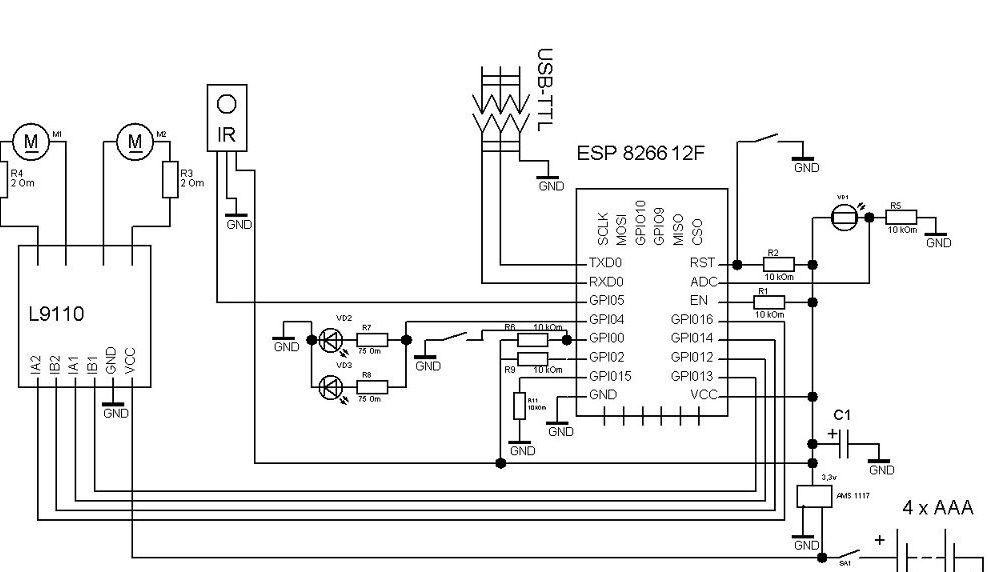
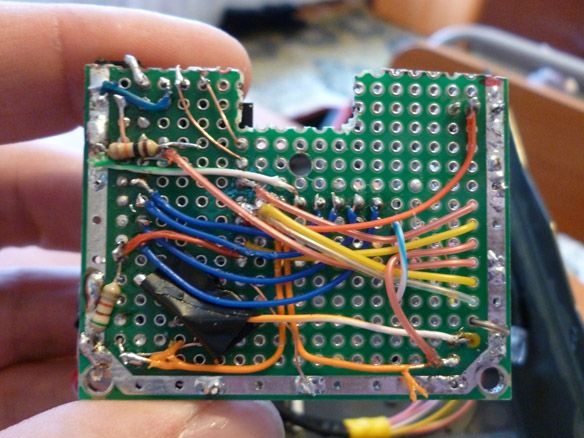
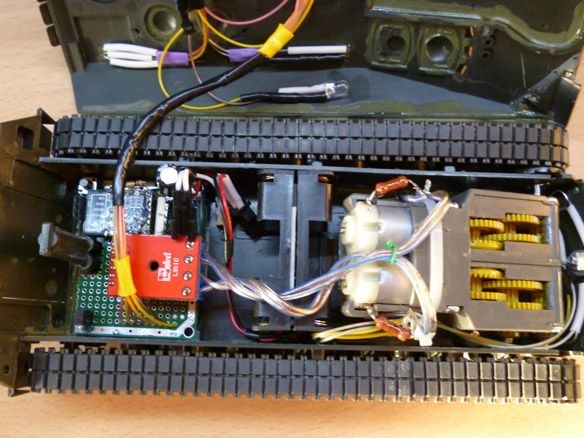
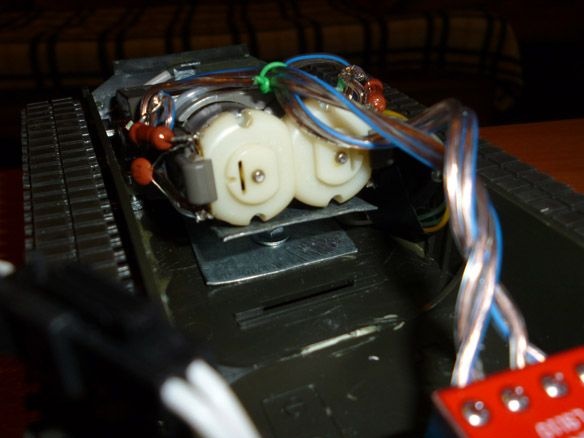
Wyjaśnię trochę, niebieska i dwie czerwone diody LED są potrzebne do podświetlenia (jest widoczna i piękna w ciemności), fotorezystor jest podłączony do ADC kontrolera i jest potrzebny do określenia oświetlenia (gdy podświetlenie staje się ciemne). Rezystory podciągające 10 kOhm, 75 Ω dla diod LED, 2 Ω ograniczające prąd dla silników (bez nich, podczas próby poruszenia sterownik jest przeciążony). Lutujemy wszystko zgodnie z obwodem na płytce drukowanej. Do zasilania można użyć 4 „małych” baterii lub czterech baterii AAA, lutowanych szeregowo. Przyklejamy dwie przegrody po dwa akumulatory dwustronną taśmą i łączymy szeregowo. Zarówno przedziały baterii, jak i akumulatory są umieszczone między skrzynią biegów a płytką drukowaną.

Jeśli twój wybór padł na Arduino. Tylko Arduino Pro MINI mieści się w środku. Warto wybrać płytę 3,3 V, ponieważ silniki są zaprojektowane na 3 V, a Ty nie chcesz oddzielnie zasilać silników i Arduino. Arduino jest łatwiejsze. Cała wiązka sterownika i regulator napięcia są już na płycie. Pozostaje rozlutować gniazdo Arduino i sterownik silnika na płytce drukowanej.

Krok 3 Przygotowanie środowiska programowania.
Aby edytować oprogramowanie wewnętrzne i wypełnić szkic w ESP, musisz zainstalować Arduino IDE z oficjalnej strony Arduino.cc, a także zainstalować dodatek do ESP, za pośrednictwem Boards Managera. Aby to zrobić, uruchom Arduino IDE, a następnie Plik - Ustawienia - w polu Adresy URL Menedżera dodatkowych tablic wstaw link
http://arduino.esp8266.com/package_esp8266com_index.jsonkliknij OK (w tym polu możesz wprowadzić kilka łączy oddzielonych przecinkiem). Dalej Narzędzia - Zarząd - Menedżer tablic, wpisz esp8266 w polu filtru i kliknij ESP8266 przez Forum społeczności ESP8266. Kliknij Zainstaluj i poczekaj na zakończenie pobierania. Teraz pozostaje wybrać Tablicę - ogólny ESP8266 w menu Narzędzia i ustawić częstotliwość modułu na 80 lub 160 MHz, rozmiar pamięci flash i wybrać port szeregowy, do którego podłączony jest adapter USB-TTL.
W przypadku Arduino wystarczy zainstalować Arduino IDE z oficjalnej strony Arduino.cc.
Krok 4 Oprogramowanie układowe
Pozostaje edytować szkic i wypełnić go ESP.
W polu „String _ssid =" ”;" między cudzysłowami wskazują, z którym punktem dostępu chcesz się połączyć.
"String _password =" ";" to hasło do tej sieci.
"String _ssidAP =" Mardella ";" nazwa sieci, którą ESP podniesie, jeśli nie połączy się z istniejącą.
"String _passwordAP =" 12345678 ";" - hasło sieci, które ESP podniesie, jeśli nie połączy się z istniejącym.
„String SSDP_Name =„ Mardella ”;” Nazwa SSDP
Po uruchomieniu ESP próbuje połączyć się z punktem dostępu określonym w szkicu, jeśli się powiedzie, musisz określić adres IP naszego robota i połączyć się z tym adresem za pomocą przeglądarki. Możesz także przejść przez komputer do infrastruktury sieciowej, znaleźć tam nasz czołg i kliknąć dwukrotnie, aby się z nim połączyć. Jeśli połączenie się nie powiedzie, ESP staje się punktem dostępu. Następnie dostęp można uzyskać, łącząc się z nowym punktem dostępu i wpisując 192.168.1.1 w przeglądarce.
Interfejs internetowy składa się z dwóch stron. Pierwszy kontrolujący. Drugi dotyczy personalizacji. Na drugiej stronie możesz określić punkt dostępu, z którym chcesz się połączyć, a także nazwę czołgu oraz nazwę i hasło punktu dostępu, który podnosi ESP. Wszystkie zmiany obowiązują po ponownym uruchomieniu. Możesz także ponownie uruchomić moduł za pośrednictwem interfejsu internetowego.
W przypadku Arduino musisz edytować wszystkie pola „results.value”. Po zapisaniu kodów IR pilota, którego tam będziesz używać.

Tanchika wideo: