


Dzień dobry, chcę udostępnić instrukcje dotyczące elektryfikacji modelu do klejenia w skali 1/35 Tamiya 35163 JGSDF TYP 61 ZBIORNIK. Do ruchu użyjemy podwójnej skrzyni biegów Tamiya 70097, a jako kontrolera ESP 8266-12E. Kontrola Wi-Fi za pomocą powłoki internetowej.
Będziemy potrzebować:
- Tamiya 35163 JGSDF TYP 61 ZBIORNIK (1:35)
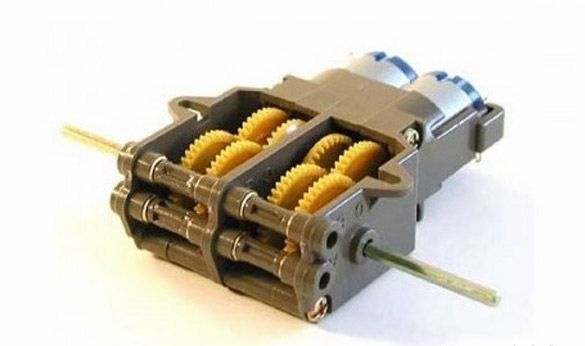
- Tamiya 70097 Twin-Motor Gearbox Kit Redutcor Motor
- Klej modelarski TAMIYA
- ESP 8266 -12E lub ESP 8266 -12F
- AMS 1117 3.3v 800mA - stabilizator napięcia
- Sterownik silnika Qifei L9110
- Kondensator 10v 1000uF
- Otwarta komora na dwie baterie AAA
- 4 baterie AAA lub 4 baterie AAA 1,2 V 1000 mA NI-MN
- rezystor 2 omów 2 szt.
- Rezystor 10 kOhm 6 szt.
- Przycisk
- przełącznik
- USB - TTL
- płytka drukowana
- lutownica
- druty w wielu kolorach
Krok 1 Obudowa i mechanika.
Przede wszystkim musimy skleić nasze model Tamiya 35163. Otwórz pudełko:
Zacznij od wyciągnięcia szczegółów modelu. Wystające części lub resztki ramy należy wyciąć nożem lub wyczyścić papierem ściernym. Montujemy dolną część nadwozia zgodnie z instrukcją, należy nie tylko przykleić części do montażu kół napędowych. Właśnie zastosowałem te szczegóły, aby zrobić zdjęcie:

Z drugiej strony wygląda to tak:

Uważaj, aby nie przykleić mocowań kół klejem, wszystkie koła powinny się swobodnie obracać. Gąsienice na skrzyżowaniu należy również skleić ze sobą. Po zmontowaniu podwozia lepiej pozwolić mu dokładnie wyschnąć przed dalszymi czynnościami:

Gdy podwozie wyschnie, przyklej górną część. Po pierwsze, fundament. Istnieje wiele małych części, lepiej jest użyć pęsety do sklejenia takich części. Klejona podstawa:

Zbieramy wieżę. Dostępne są dwie opcje dla wieży. Różnica polega na szczegółach montażu lufy na wieży. Pierwsza opcja to standardowe mocowanie, druga z ochroną przed kurzem. Warto wybrać, który najbardziej Ci się podoba. Różnica ta znajduje odzwierciedlenie tylko w wyglądzie. Przykleił model w święta sylwestrowe, więc ubrał też czołg:

Złóż razem i pozostaw do wyschnięcia:

Podczas suszenia modelu przejdźmy do montażu motoreduktora. Użyjemy motoreduktora i silników tej samej firmy co model, a mianowicie Tamiya 70097:
Instrukcja dołączona do zestawu nie ma języka rosyjskiego, ale jest już zrozumiała.Szczegółowo opisano tam dwie opcje montażu:
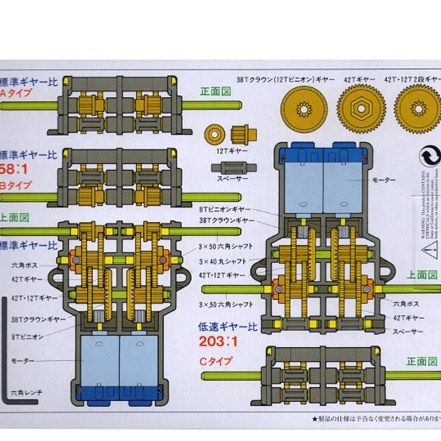
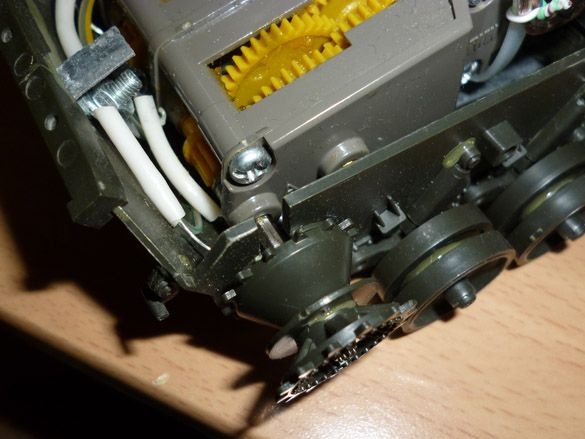
W pierwszym przypadku przełożenie wynosi 58: 1, w drugim - 203: 1. Korzystamy z pierwszej opcji. Wały wyjściowe skrzyni biegów powinny być prowadzone przez otwory centralne. Boczne oczy skrzyni biegów powinny być przecięte, będą zakłócać instalację w modelu. W przeciwnym razie skrzynia biegów jest dość łatwa do zamontowania w modelu. Następnie nakładamy małe koła zębate na silniki i wkładamy je do skrzyni biegów. Dla każdego z silników do jednego ze styków należy przylutować rezystor o wartości 2 omów. Przylutowujemy jeden przewód do rezystora, a drugi przewód do drugiego styku silnika. Po zakończeniu montażu silników montujemy zmontowany silnik przekładniowy w modelu. Przymocuj za pomocą kleju.
Kierujemy również koła napędowe na wały wyjściowe.
Przyszłe plany obejmują dodanie funkcji obrotu wieży i ewentualnie strzelania z broni. W poniższych instrukcjach postaram się opisać te modyfikacje.
Krok 2 Elektryfikacja.
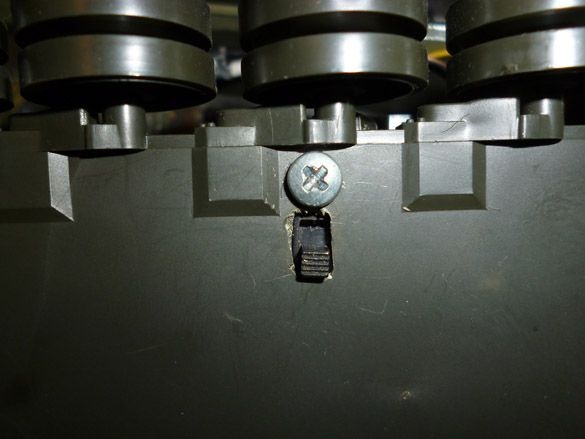
Po zebraniu modelu i czekaniu na całkowite wyschnięcie przejdź do e farsz. W dolnej części wycinamy przełącznik:
Dwie komory baterii są lutowane szeregowo i sklejane ze sobą. Wyprowadzamy również wygodne złącze na końcu przewodów.

Do zasilania modelu można użyć baterii AAA („małych”) lub baterii AAA Ni-Mn 1,2 V.
Weź ESP8266. Jest to mały, ale dość funkcjonalny moduł, a wbudowany moduł Wi-Fi zapewnia połączenie z dom Sieć Wi-Fi. Polecam wybrać moduł z 4 Mb pamięci. Aby uruchomić i sflashować ESP-8266 ESP, musisz złożyć minimalne wiązanie. Moduł zasilany jest napięciem 3,3 V. Nie można go podłączyć bezpośrednio do niestabilizowanego źródła zasilania. Dlatego włączamy do obwodu stabilizator napięcia AMS 1117 3.3v. Pin VCC jest podłączony bezpośrednio do dodatniego kabla zasilającego stabilizatora, a pozostałe piny: CH_PD, RESET, GPIO0, GPIO2 muszą być podłączone przez rezystor, to znaczy pociągnięty do zasilacza (VCC). Zaleca się stosowanie rezystorów 10kOm, ale można je wymienić na inne od 4,7kOm do 50kOm. Nie można zmienić tylko rezystora GPIO15, jego wartość nominalna powinna wynosić do 10k. Bezpośrednio podłączamy tylko GND do ujemnego przewodu zasilającego (GND). Aby wejść w tryb oprogramowania modułu, GPIO0 musi być podłączony do GND. Przycisk jest potrzebny do ponownego uruchomienia modułu, gdy jest on flashowany. Wnioski Tx, Rx, GND są dokonywane w złączu USB-TTL. Połączenie USB-TTL wygląda następująco:
ESP 8266 - USB-TTL
Tx - Rx
Rx - Tx
GND - GND
Schemat jest następujący:

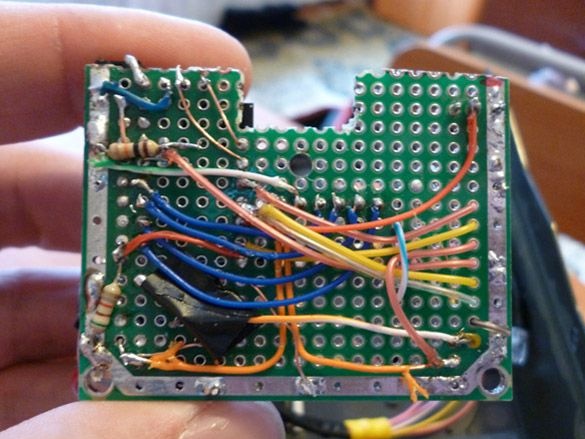
Najwygodniej jest umieścić to wszystko na małej płytce drukowanej:
Naprawiamy płytkę drukowaną z tyłu zbiornika:
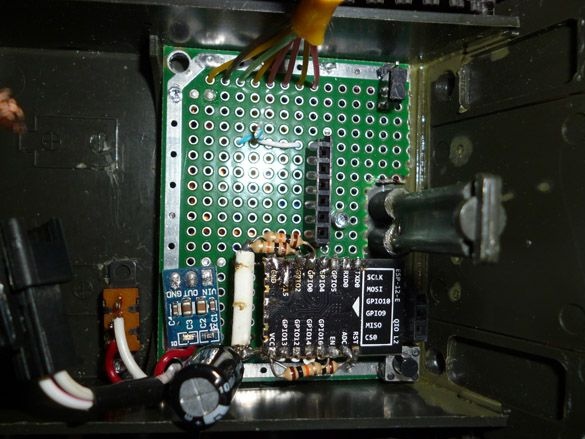
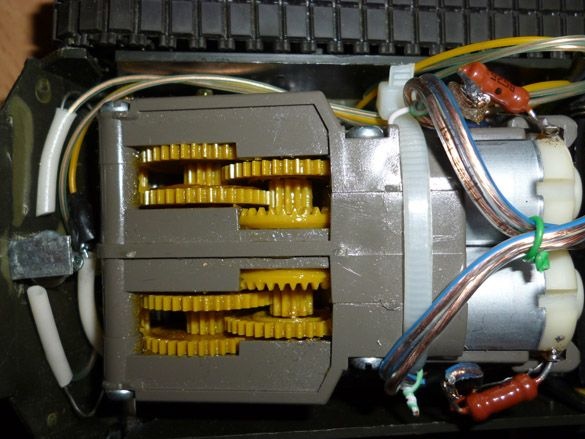
Komora akumulatora jest umieszczona między motoreduktorem a płytką drukowaną:

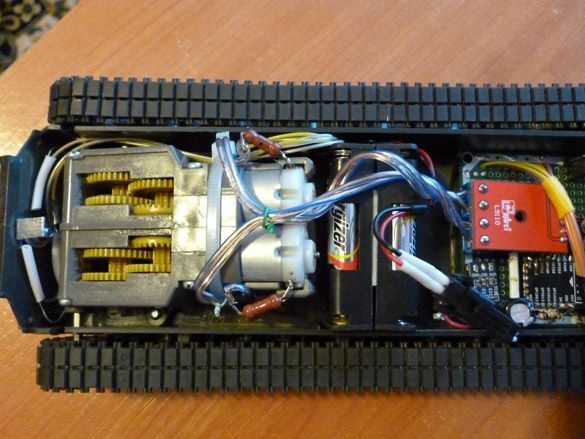
Wszystkie zmontowane i zainstalowane elementy elektryczne znajdują się w dolnej części zbiornika:
Krok 3 Oprogramowanie.
Aby edytować i wypełnić szkic w ESP, musisz pobrać Arduino IDE z oficjalnej strony
Arduino.cc.
Następnie zainstaluj Arduino IDE. Następnie kontynuujemy instalację dodatku do ESP. Robimy to za pośrednictwem Menedżera tablic. Najpierw uruchom Arduino IDE, a następnie Plik - Ustawienia - w polu Adresy URL Menedżera dodatkowych tablic wstaw link:
http://arduino.esp8266.com/package_esp8266com_index.jsonkliknij OK (w tym polu możesz wprowadzić kilka łączy oddzielonych przecinkiem). Następnie przejdź do Narzędzia - Zarząd - Zarząd desek w polu filtra, wpisz esp8266 i wybierz ESP8266 przez Forum społeczności ESP8266. Kliknij Zainstaluj i poczekaj na zakończenie pobierania. Teraz wybieramy z menu Narzędzia - Płytka - Ogólny ESP8266, ustawiamy częstotliwość twojego modułu 80 lub 160 MHz, wielkość pamięci flash. Następnie wybierz port szeregowy, do którego podłączony jest adapter USB-TTL.
Teraz musisz zainstalować narzędzie, aby uzyskać dostęp do systemu plików ESP. Aby to zrobić, przenieś pliki z archiwum do folderu narzędzi, który znajduje się w katalogu głównym Arduino IDE.
Krok 4 Szkic
Teraz, gdy środowisko programistyczne jest gotowe, przejdźmy do edycji szkicu. Otwórz szkic:
Na początku szukamy pola „String _ssid =" ";". Pomiędzy cudzysłowami wskaż punkt dostępu, z którym chcesz się połączyć.
Pole „String _password =" ”;" - służy do rejestrowania hasła do tej sieci.
Jeśli ESP nie może połączyć się z siecią wskazaną w poprzednich liniach, sterownik utworzy sieć, z którą może się połączyć.
Pole „String _ssidAP =" ”;" - wskazuje nazwę tworzonej sieci.
Pole „String _passwordAP =" 12345678 ”;„ - ustawia hasło do utworzonej sieci.
Pole „String SSDP_Name =„ ESP_Wi-Fi ”;” - ustawia nazwę SSDP.
Po edycji wszystkich powyższych wierszy musisz załadować powłokę internetową do ESP 8266. Podłączamy ESP 8266 przez USB-TTL do komputera zgodnie z powyższym schematem. W Arduino IDE wybierz Narzędzia - ESP8266 Szkic przesyłanie danych. Czekamy na zakończenie procesu przesyłania pliku. Teraz możesz nagrać sam szkic. Najpierw przełącz ESP8266 w tryb oprogramowania układowego. Aby to zrobić, podłącz GPIO0 do GND. Naciśnij przycisk wypełniania szkicu, a następnie naciśnij przycisk resetowania na module EPS. Oczekiwanie na zakończenie wypełniania szkicu.
Wyjaśnię trochę algorytm ESP 8266. Podczas uruchamiania EPS próbuje połączyć się z siecią Wi-Fi określoną w polu String _ssid. Jeśli z jakiegoś powodu to się nie powiedzie, ESP podnosi sieć o nazwie podanej w polu ssidAP. W pierwszym przypadku możesz kontrolować zbiornik za pomocą dowolnego urządzenia podłączonego do tej samej sieci. W drugim przypadku musisz połączyć się z ESP za pomocą dowolnego urządzenia, tabletu, telefonu lub komputera. Następnie w przeglądarce urządzenia, za pomocą którego będziemy kontrolować zbiornik, musisz wprowadzić adres IP zbiornika. Możesz znaleźć adres IP, podłączając ESP do komputera, a następnie otwórz okno terminala i uruchom ponownie ESP. Po uruchomieniu adres IP zbiornika zostanie zapisany w oknie terminala. Lub możesz określić stały adres IP przypisany przez ESP w ustawieniach routera Wi-Fi. Ponadto, jeśli używasz komputera z systemem Windows, możesz przejść do infrastruktury sieciowej, znaleźć tam nasz czołg i kliknąć dwukrotnie, aby się z nim połączyć. Jeśli sam ESP podniesie punkt dostępu, adres IP czołgu wyniesie 192.168.1.1.
Interfejs internetowy jest napisany w języku HTML i składa się z dwóch stron. Pierwszy zawiera polecenia sterujące. Po drugie, możesz zmienić ustawienia ESP 8266. Na stronie ustawień dostępne są następujące parametry do zmiany: nazwa punktu dostępu, z którym chcesz się połączyć, hasło tego punktu dostępu, nazwa zbiornika, nazwa tworzonej sieci i hasło do połączenia z tą siecią. Wszystkie zmiany zaczną obowiązywać dopiero po ponownym uruchomieniu. Funkcja przeładowania ESP jest również dostępna w interfejsie internetowym.
Po zakończeniu wszystkich prac zbiornik można pomalować farbami modelowymi. Malowany czołg wygląda ładniej:

Nie mam cierpliwości do takiej pracy. Dlatego moje modele pozostają bez malowania:

