

W artykule rozważymy przykład stworzenia legendarnego robota o nazwie „Canbot”. Większość szczegółów dotyczących robota jest drukowana na drukarce 3D. Robot jest sterowany zdalnie.
Materiały i narzędzia do domowej roboty:
- Jeden mikrokontroler Atmel Attiny85;
- dwie mikrousługi HXT900 lub ich analogi;
- jedna bateria LiPo 3,7 V;
- jeden odbiornik podczerwieni przy 38 kHz;
- przetwornik ultradźwiękowy typu HC-SR04;
- zamiast tego przełącznik lub zworka 9x4mm;
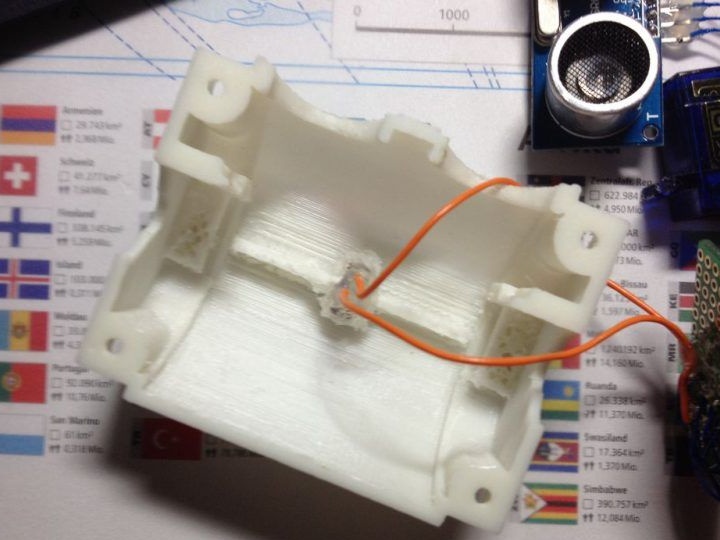
- Części 3D (możliwe). Zajmie jedno górne (top.stl), jedno dolne (bottom.stl) i dwa koła (wheel.stl).
Oczywiście potrzebne będą narzędzia lutownicze, gorący klej, wkrętaki, śruby, druty i inne drobne rzeczy.

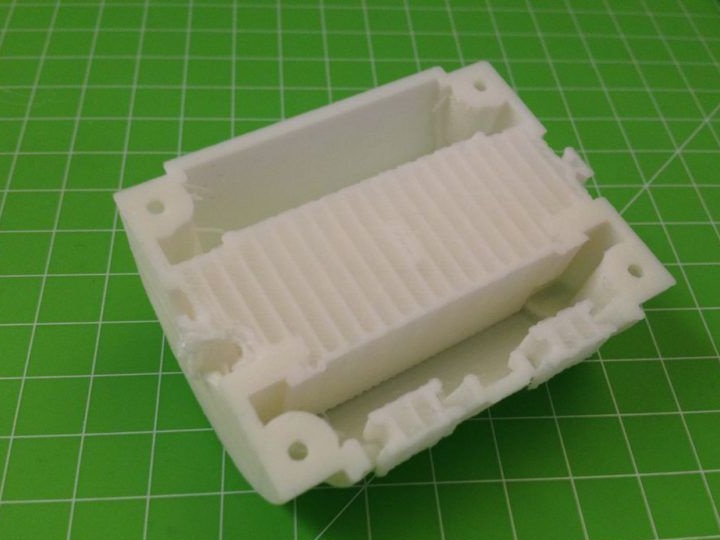
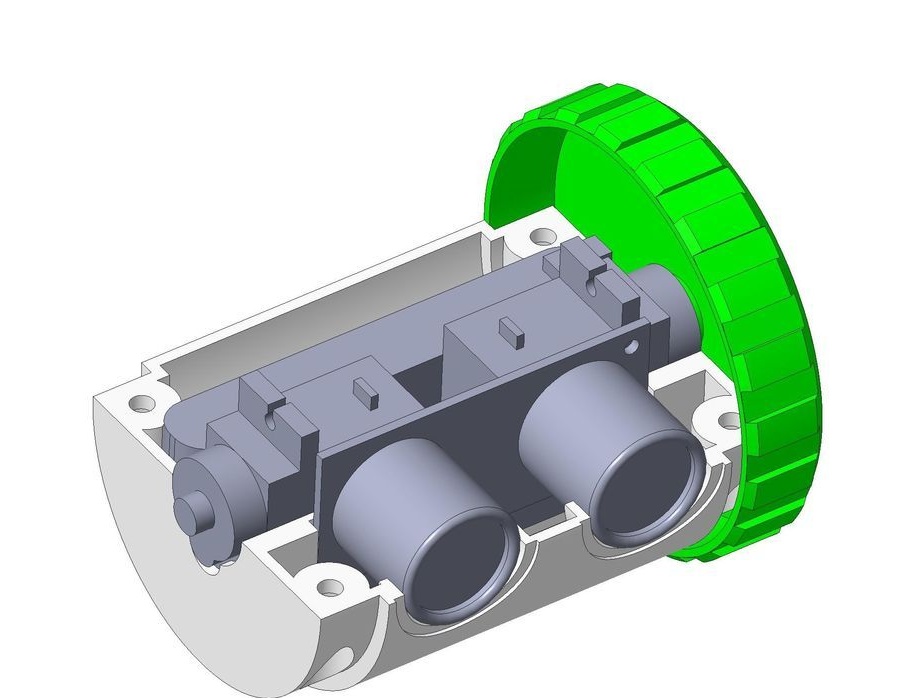
Górne i dolne części będą musiały być wydrukowane płaską stroną do dołu za pomocą opcji „konstrukcji wsporczych”. W zależności od typu używanej drukarki gotowe części mogą wymagać czyszczenia na końcu.
Proces produkcyjny robota:
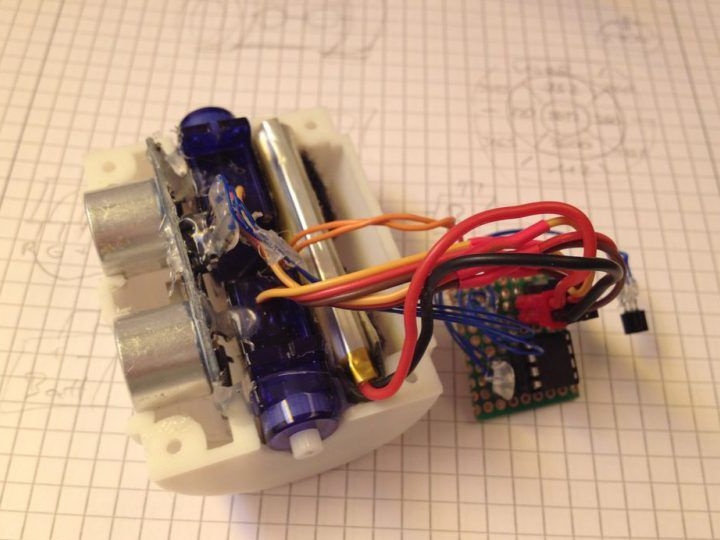
Pierwszy krok Elektroniczny część robota
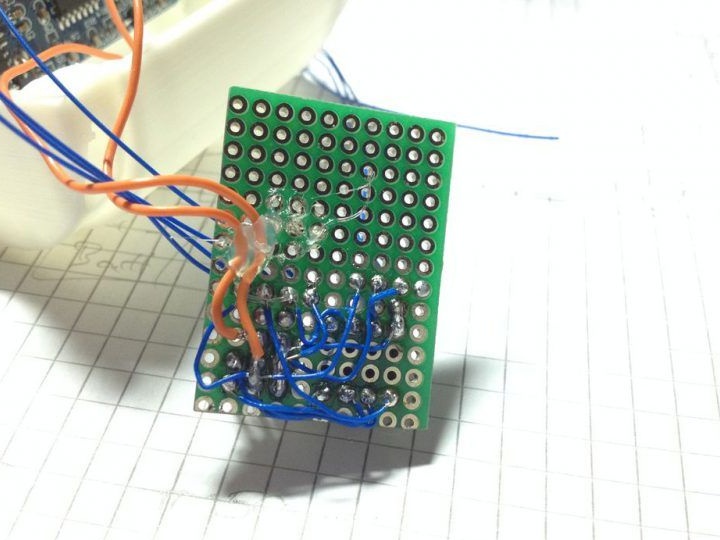
Najpierw musisz skonfigurować serwomechanizmy, należy je przekonwertować na ciągły obrót. Jak to zrobić, w Internecie jest mnóstwo instrukcji. Cóż, wtedy wszystkie elementy elektroniczne będą musiały zostać zmontowane, jak pokazano na schemacie. Montaż części elektronicznej był wygodny, możesz wziąć mały kawałek deski do chleba, a także cienkie druty.


Krok drugi Część programowa robota
Jeśli podejdziesz do procesu tworzenia robota z najwyższym profesjonalizmem, część oprogramowania można napisać niezależnie. Ale w tym celu musisz nauczyć się języka programowania. W prostszej wersji możesz pobrać gotowy kod i po prostu załadować go do mikrokontrolera.
Według autora, najlepsze robot odbiera sygnały podczerwieni z pilotów marki Sony. W przyszłości konieczne będzie „ponowne flashowanie” części kodu Arduino i wyprowadzaj dane za pomocą funkcji Serial.print (). W rezultacie będzie można dowiedzieć się, jakie kodowanie znajduje się na każdym przycisku.
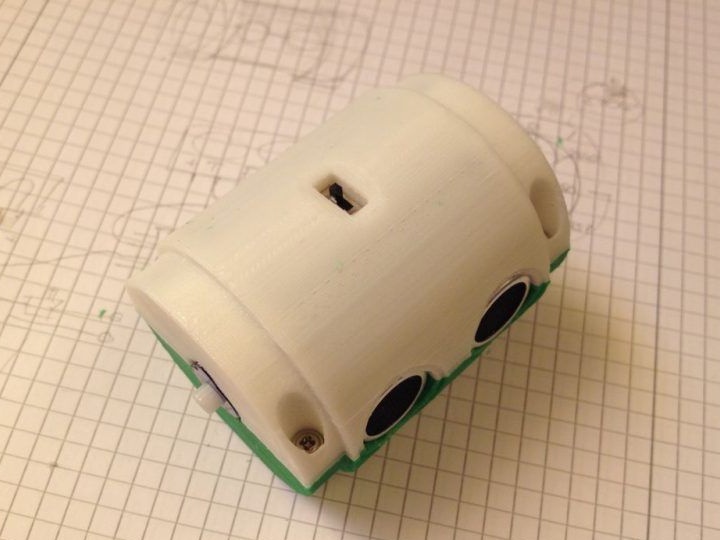
Krok trzeci Ostatni etap. Złóż robota
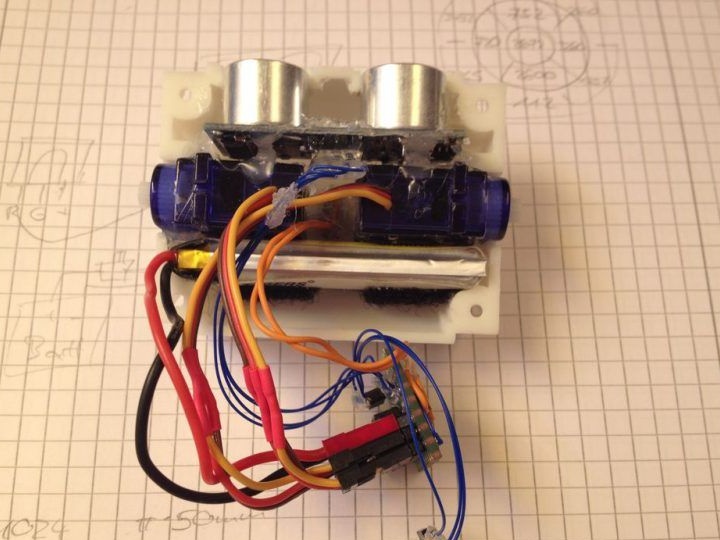
Podsumowując, robot jedzie. Do tych celów potrzebujesz gorącego kleju. Dzięki niemu musisz naprawić przewody, aby nie spadły podczas ruchu robota.Konieczne jest również naprawienie przełącznika i prawidłowe zamocowanie czujnika ultradźwiękowego. Podsumowując, pokrywy robota są połączone za pomocą czterech śrub, dzięki czemu w razie potrzeby można go łatwo zdemontować. Nawiasem mówiąc, śruby do serwomechanizmów są idealne do montażu.

To wszystko, teraz robot jest prawie gotowy. Pozostaje zainstalować koła na wałach serwomotorów i możesz rozpocząć testowanie robota. Możesz zobaczyć bardziej szczegółowo, jak domowe wideo działa.