

Na filmie możesz zobaczyć, jak działa robot. Stopniowo zmienia kolor podczas pracy.

Materiały i narzędzia do montażu robota:
- wsporniki montażowe w kształcie litery U;
- cztery baterie 1,5 V LR44 każda;
- wielokolorowa dioda RGB z funkcją przełączania;
- rury izolacyjne;
- stalowa pinezka;
- silnik niskiego napięcia typu RF-300CA;
- przycisk włączania robota (z dwoma przewodami);
- przewody do podłączenia silnika;
- migająca dioda LED alarmu.
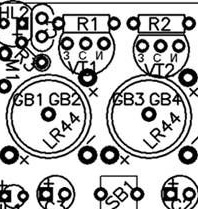

Jeśli chodzi o niezbędne elektroniczny elementy są pokazane na rysunku. Płytka drukowana jest wykonana z folii z PCB, jej wymiary to tylko 30 x 30 mm. Autor zaleca również użycie małych kondensatorów polarnych do montażu.
Proces produkcji robota
Pierwszy krok Schemat robota
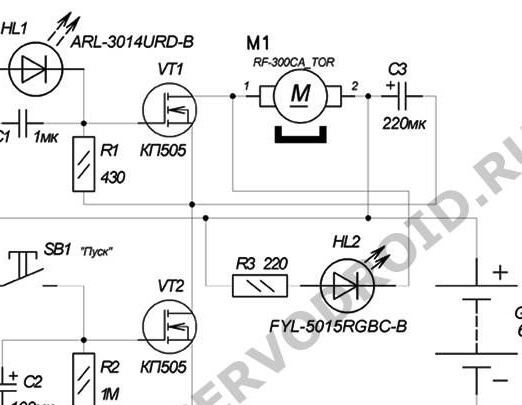
Obwód robota można zobaczyć na rysunku. Po włożeniu akumulatora robot jest w stanie wyłączonym; aby go włączyć, naciśnij przycisk SB1. Natychmiast po tym kondensator C2 jest natychmiast ładowany. Płytka dodatnia z kondensatora jest podłączona do bramki tranzystora polowego VT2. W związku z tym, po osiągnięciu progu przełączania, rezystancja kanału dren-źródło tego kanału natychmiast maleje i na drenie powstaje ujemny ładunek potencjalny. Cóż, co stanie się później, można zobaczyć bardziej szczegółowo na schemacie.
Krok drugi Zamontuj RGB LED
Dioda LED pod numerem 1 jest zamontowana na płytce drukowanej. Na rysunku ta pozycja nazywa się HL2. Po zainstalowaniu diody LED należy zgiąć jej wnioski, aby dioda LED była skierowana na bok. Dlatego podczas pracy dioda LED nie będzie świecić, ale z boku, oświetlając ściany. W którą stronę świeci światło wskazuje czarna strzałka.

Krok trzeci Zamontuj wsporniki montażowe akumulatora
Aby zapewnić kontakt między akumulatorem a robotem, stosowane są sworznie popychające.Jeden przycisk jest zainstalowany pośrodku, na schemacie jest oznaczony jako GB1, GB2, a drugi jest ustawiony w pozycji GB3, GB4. Aby bezpiecznie naprawić kontakty, przyciski są przylutowane dużą ilością lutu.


Baterie są zainstalowane na metalowym przycisku pod numerem 3. Baterie są przymocowane za pomocą łącznika w kształcie litery U, na którym noszone są izolatory z rurek. Górna część wspornika musi być lekko wygięta łukiem w dół, co pozwoli docisnąć akumulatory do dolnego styku. Rury izolacyjne są potrzebne, aby pionowe powierzchnie akumulatorów nie stykały się z poziomymi.
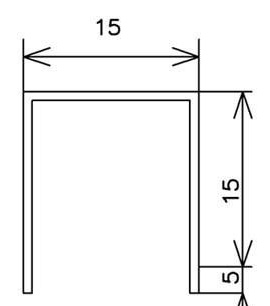
Aby wykonać zapięcie w kształcie litery U, musisz użyć dwóch spinaczy do papieru. Muszą być wygięte w kształcie litery U, jak pokazano na rysunku. Można stosować dowolne rurki, tutaj stosuje się polichlorek winylu. Ich wysokość powinna być równa wysokości baterii.
Zainstaluj wspornik przez lutowanie, w tym celu musisz cynować jego końce. Do cynowania konieczne jest użycie neutralnego topnika, który nie myje.
Krok czwarty Zamontować silnik
Silnik jest zainstalowany z boku płyty, gdzie przechodzą tory, znajduje się z wałem skierowanym w dół. Aby przymocować silnik, możesz użyć kleju na gorąco lub taśmy dwustronnej. Ale zanim mocno przymocujesz silnik, musisz go podłączyć i sprawdzić, czy cały system działa.

Krok piąty Konfiguracja i testowanie domowej roboty
Po zmontowaniu robota możesz przetestować i skonfigurować. Aby to zrobić, musisz zainstalować baterie w robocie, są one instalowane zamiast GB1, GB2 i GB3, GB4. W takim przypadku elektronika musi być w stanie wyłączonym. Po zainstalowaniu baterii robot można włączyć, odbywa się to za pomocą przycisku SB1. Po naciśnięciu silnik powinien zacząć działać, dioda LED HL1 będzie migać, a dioda RGB również się zaświeci.
Po pewnym czasie robot wyłączy się automatycznie, zatrzyma się i zgasną wszystkie diody. Następnie włącza się w taki sam sposób, jak za pierwszym razem, naciskając przycisk.

Aby dostosować czas robota, musisz eksperymentować z wartościami rezystora R2 i kondensatora C2, są one odpowiedzialne za tę funkcję. Jeśli musisz ustawić maksymalną pracę robota, wówczas pojemność kondensatora powinna być jak największa. W tak prosty sposób możesz zmontować tak interesującego robota.