
Osobliwością robota BIBOT-1 jest to, że może on wykonywać dwa zadania. Może poruszać się za źródłem światła lub wzdłuż czarnej linii, którą można narysować na papierze. Robot bardzo elastyczny w ustawieniach, to znaczy później można go dostosować do dowolnych warunków, to znaczy, aby był bardziej wrażliwy na światło lub mniej. Możliwe jest również dostosowanie prędkości obrotowej silników, co pozwoli na lepszą pracę robota, szczególnie podczas poruszania się wzdłuż linii.

Urządzenie i zasada działania robota:
Podstawa robota jest wykonana z tektury, szablon jest drukowany na drukarce, a następnie ulega awarii. Jeśli chodzi o moduł komponentów radiowych, za podstawę przyjęto textolit, moduł jest przymocowany do podstawy robota. Aby ciało było sztywniejsze, w projekcie zastosowano specjalne żebra.
Silniki są instalowane jak w większości z nich domowej roboty, to znaczy pod kątem. Z tego powodu nie ma potrzeby zakładania kół i skrzyni biegów. Aby zapobiec przesuwaniu się wałków po powierzchni, nakłada się na nie ochraniacze.
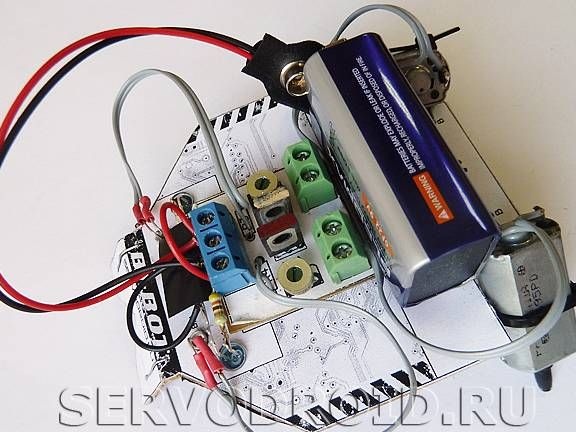
Jako źródło zasilania wykorzystywana jest bateria 9V typu 6F22. Bateria jest przymocowana taśmą i jest zawsze dostępna w celu łatwej wymiany.
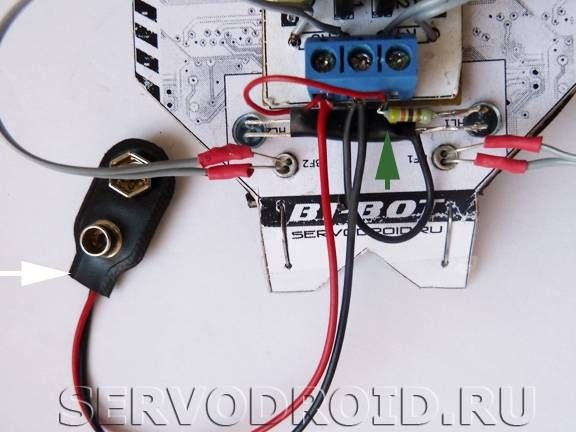
Jeśli chodzi o przełącznik auto postanowiłem uniknąć instalacji. Robot włącza się i wyłącza, manipulując klipsem mocującym do akumulatora.
I wreszcie regulacja robota. Aby dostosować czułość robota, system ma dwa oporniki regulacyjne. Kiedy się obracają, możesz dostosować czułość robota na światło, a także możesz dostosować prędkość obrotów silników. Im bardziej czuły jest robot na światło, tym szybciej będzie się poruszał i na odwrót.
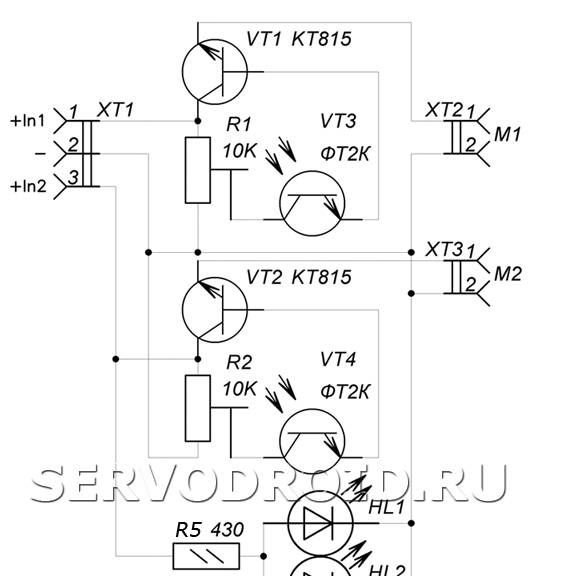
Jeśli chodzi o zasadę działania, wszystko jest przedstawione na schemacie.
Materiały i narzędzia:
- bateria 9 V i zacisk do podłączenia;
- dwa złącza do podłączenia silników (dwusekcyjne listwy zaciskowe);
- silniki;
- jastrych nylonowy;
- ochraniacz (wałek gumowy);
- dwa fototranzystory;
- dwie diody LED na podczerwień;
- wspornik zszywacza;
- trzysekcyjny blok zacisków do podłączenia zasilania;
- rezystor dostrajający.

Proces produkcyjny:
Pierwszy krok Konstrukcja PCB
Opłata tworzona jest metodą LUT. Przed pracą powierzchnia z włókna szklanego musi być dokładnie oczyszczona, a następnie umyta i dokładnie wysuszona. Po wytworzeniu tory przewodzące należy sprawdzić za pomocą multimetru pod kątem zwarcia.
Krok drugi Instalacja elektroniczny elementy
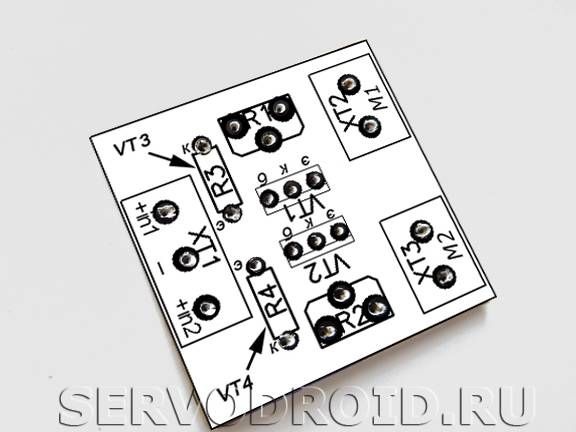
Następnie musisz wziąć rysunek wydrukowany na papierze i przykleić go do utworzonej planszy. W takim przypadku otwory na papierze i na płytce drukowanej muszą dokładnie pasować. Następnie komponenty radiowe są instalowane zgodnie ze schematem. W trakcie pracy instalacja rezystorów R3, R4 musi zainstalować fototranzystory VT3, VT4.
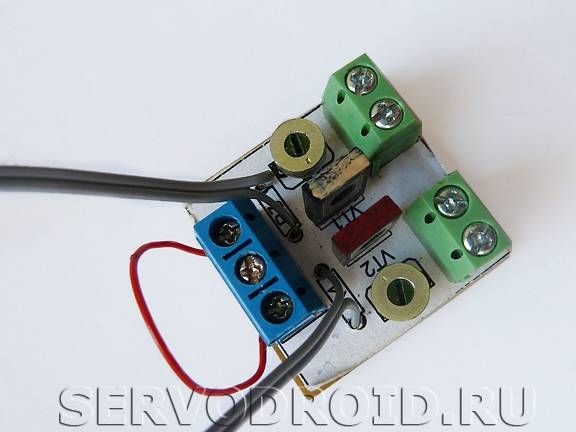
Ekstremalne odcinki trzysekcyjnego bloku zacisków XT1 muszą być połączone przewodem montażowym. Punkty połączeń styków muszą być dobrze izolowane, do tych celów najlepiej użyć rurki termokurczliwej.
Krok trzeci Jak stworzyć skrzynkę
Rysunek ciała musi być wydrukowany na zwykłym arkuszu papieru A4. Następnie musisz wziąć kawałek tektury falistej i nakleić na nim rysunek, a następnie skrzynkę należy wyciąć na obwodzie.
Tam, gdzie piktogram „nożyczek” znajduje się wzdłuż pogrubionych linii, należy wykonać cięcia. Następnie, wzdłuż czarnych kropkowanych linii, należy zgiąć karton jak na zdjęciu i umieścić czarne strzałki.



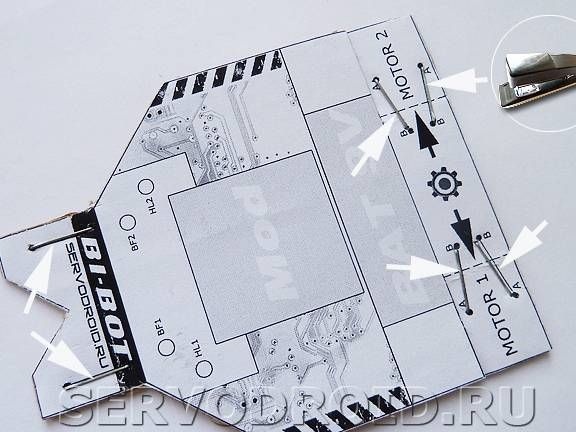


Przód i tył obudowy do określonej pozycji za pomocą zszywacza, musisz zainstalować wsporniki. Miejsca ich instalacji są oznaczone czarnymi liniami z okręgami. Potrzebne są zszywki, aby rama była sztywniejsza. Po zainstalowaniu wsporników nużące są zginanie wzdłuż linii zagięcia.
W miejscach oznaczonych BF1, BF2 należy wykonać otwory pod instalację fototranzystorów. W miejscach HL1, HL2 należy wykonać otwory o takim rozmiarze, aby pasowały do średnicy obudowy diod podczerwieni.
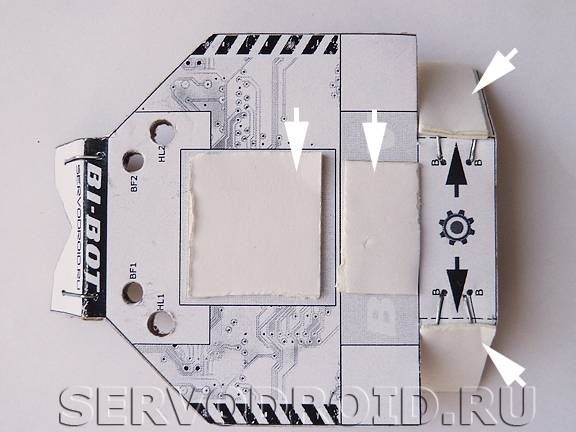
W miejscach oznaczonych jako Mod ”,„ BAT 9V ”i„ MOTOR 1 ”,„ MOTOR 2 ”przyklej paski taśmy dwustronnej.
Krok czwarty Montaż silników
Silniki są montowane na miejscu za pomocą nylonowych opasek. Aby zapobiec ślizganiu się wałów, należy je nosić z ochraniaczami. Wykonane są z gumek, które znajdują się w prętach helowych długopisów. Na tym samym etapie przylutuj przewody do silników.


Krok piąty Instalacja diod LED na podczerwień
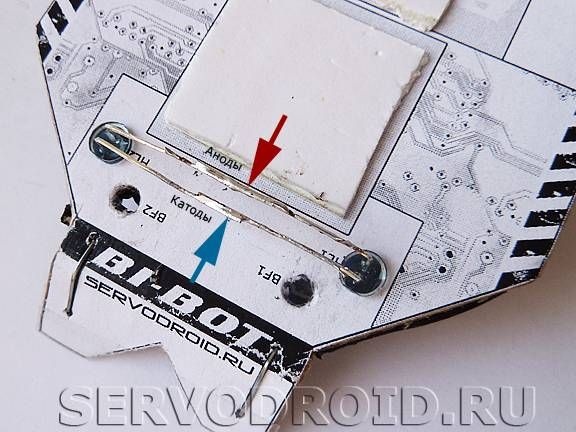
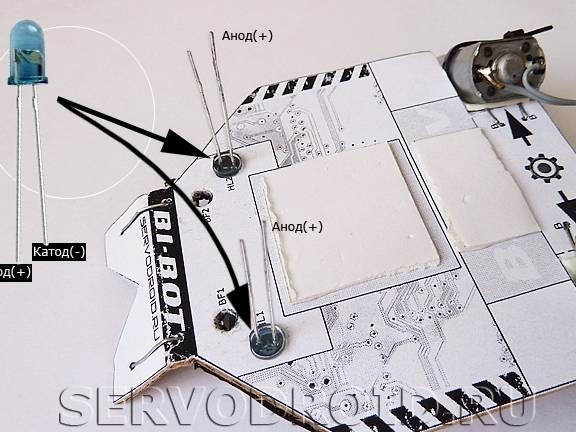
Podczas instalowania diod podczerwieni ważne jest, aby nie mylić ich wniosków, w przypadku importowanych elementów długi kontakt jest anodą, czyli plusem. Diody LED są instalowane w pozycjach HL1, HL2, jak pokazano na zdjęciu. Ustalenia są wygięte, aby diody mogły być połączone równolegle.
Rezystor 430 Ω należy przylutować do styku dodatniego diod LED, a czarny przewód do styku ujemnego.
Drugi koniec czarnego drutu należy podłączyć do środkowego styku trzysekcyjnego bloku zacisków. Jeśli chodzi o wyjście rezystora, jest on podłączony do zacisku bloku zacisków.
Krok szósty Ostatnia faza kompilacji
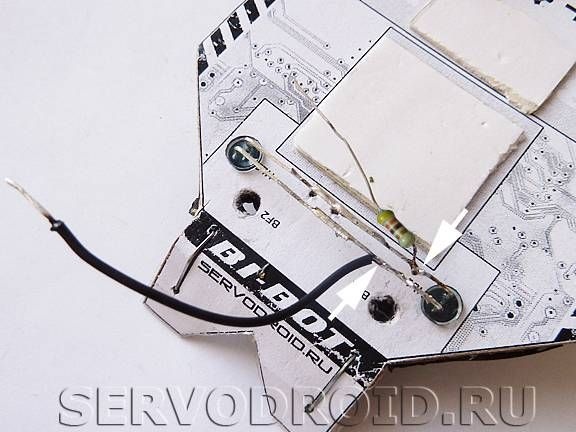
Aby robot mógł poruszać się wzdłuż linii, fototranzystory są umieszczane w miejscu BF1, BF2, jak na zdjęciu.
Tranzystory do ruchu za źródłem światła są umieszczone z tyłu.
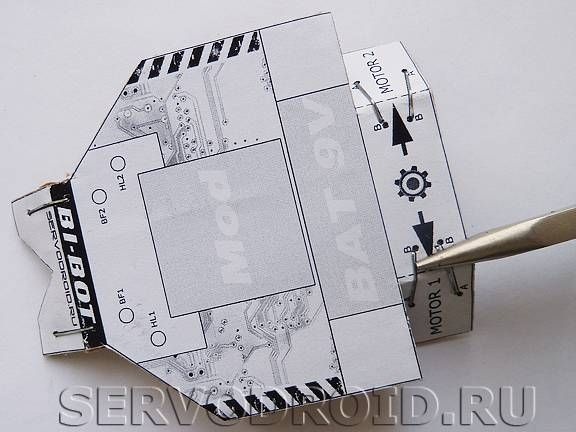
Podsumowując, silniki są podłączone i akumulator jest włożony.


To wszystko, robot jest gotowy. Teraz możesz spróbować go włączyć i skonfigurować do żądanych warunków.