


Po pierwsze, zrozummy różnicę między oktokopterem a quadkopterem. Oprócz nazwy jest to także liczba silników na szynach. Tj. quadrocopter - cztery silniki, octocopter - osiem. Odnosi się to również do heksakoptera - sześć, trikoptera - trzy itd. Jeśli na przykład prowadnice to cztery (X) i osiem silników, to nadal jest to ośmiornica, ale jest oznaczona jako X8. Tj. na czterech szynach, osiem silników.
Zasadniczo liczby z prefiksem dla helikopterów to samoloty sterowane sygnałem radiowym operatora z ziemi. Student z Indii postanowił pójść dalej i stworzyć ośmiokopter zdolny wynieść człowieka w powietrze. To nie jest tani projekt. Finansowanie przejęła instytucja edukacyjna.
Narzędzia i materiały:
- Silniki Turnigy CA170 Silniki - 8 szt;
- Kontroler Turnigy Fatboy 300A - 4 szt;
- Sterownik Turnigy 200A HV - 4 szt .;
- Nadajnik Hitech XG11 Tx / Rx;
-Flight kontroler DJI A3 Pro;
-Kontroler lotu DJI Naza M V2;
- Bateria Zippy 22,2 V 5 Ah 40C LiPo - 16 sztuk;
- Ładowarka LiPo 6s Charger;
-Złącza XT150 - 50 sztuk;
-Wire Sillicone Wire 8AWG - 10 metrów;
Serwa;
-Ball do gry w squasha (Squash Balls) - 4 szt;
- arkusz MDF 25 cm x 50 cm x 2 mm;
-Drill;
- szlifierka kątowa;
- Wkrętaki;
- klucze;
- szczypce;
-Ocinarka laserowa lub piła taśmowa;
- Asortyment nakrętek 4 mm, 6 mm i 8 mm, śrub i podkładek;
-Burner;
-LED LED;
- Akcesoria do lutowania;
- drut stalowy 2 i 3 mm;
-Telrep śruba 100 mm-200 mm - 40 sztuk;
- 40 haczyków i śrub oczkowych;
-Tachometr Turnigy RPM;
-Analizator mocy (watomierz / amperomierz Turnigy);
-Kontroler baterii;
- Rury z profilu aluminiowego;
-Płyta aluminiowa;
- Taśma dwustronna;
-Spawarka;
-Ruletka;
-Komputer z Fusion 360;
- Akumulator 11,1 V 2200 mAh LiPo 30C;
- Gęsta tkanina 1,2m x 1,2m;
- Mocna nić i igła;
-Bezpieczeństwo pasa;
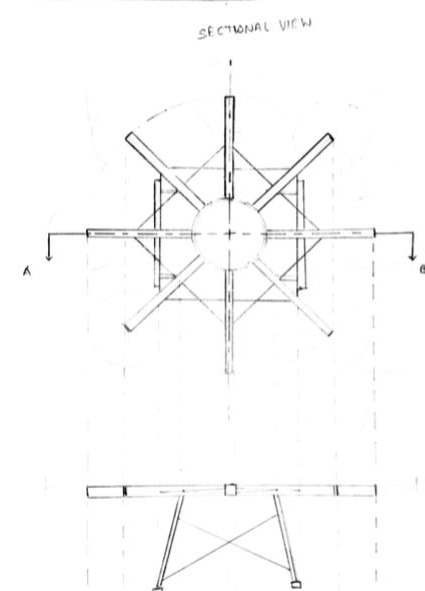
Krok pierwszy: Projektowanie
Opracowując załogowy oktokopter, mistrz wziął pod uwagę różne opcje konfiguracji oraz X8, H i T, ale doszedł do wniosku, że najbardziej optymalnym, z różnych powodów, będzie projekt oktokoptera, zgodnie z tradycyjnym schematem.
Następnie należało dowiedzieć się, jaki powinien być rozmiar oktokoptera. Obliczenia wykonano na przykład za pomocą modeli CAD na Fusion 360. W obliczeniach uwzględniono istniejące śruby. Optymalne okazało się, że ma średnicę trzech metrów, wysokość jednego metra. Kosz wewnętrzny dla osoby 55x55 cm.

Krok drugi: koszyk
Rama została przyspawana z aluminiowego kwadratowego profilu o półce 50 mm i grubości ścianki 2 mm.
Profil został wycięty i spawany. Szwy są czyszczone.



Krok trzeci: Montaż płyt
W przypadku wsporników mistrz zastosował aluminiowe płyty 1,5 mm. W sumie jest osiem nawiasów, cztery w rogach i cztery w środku kadru. Długość ramienia ramienia i części nośnej wynosi 15 cm. Wsporniki zostały zaprojektowane w Fusion 360. Płyty zostały przycięte frezem. Wiercone są w nich otwory montażowe. Następnie wsporniki zostały przyspawane do ramy.

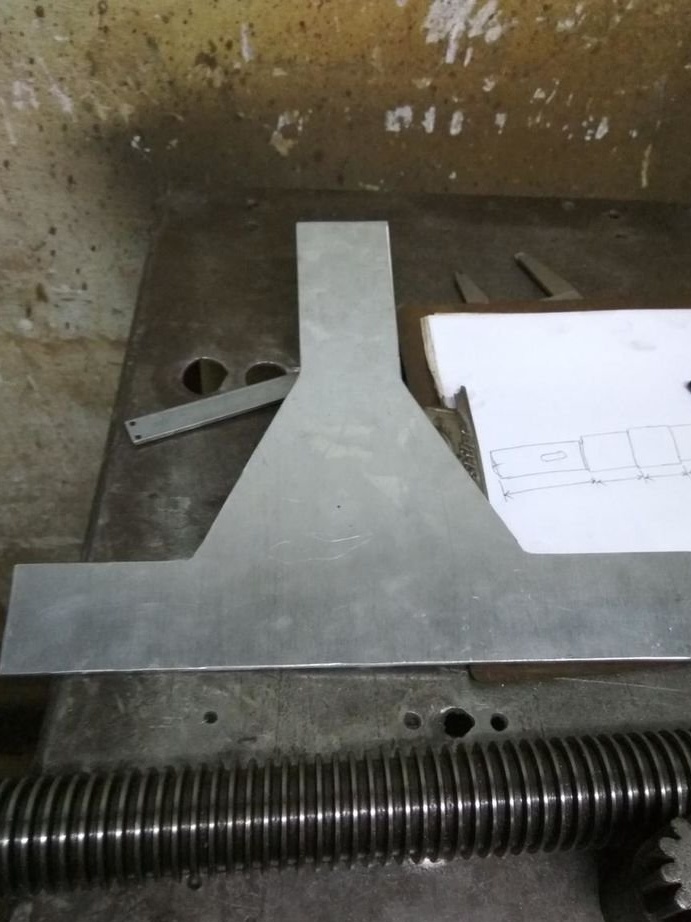





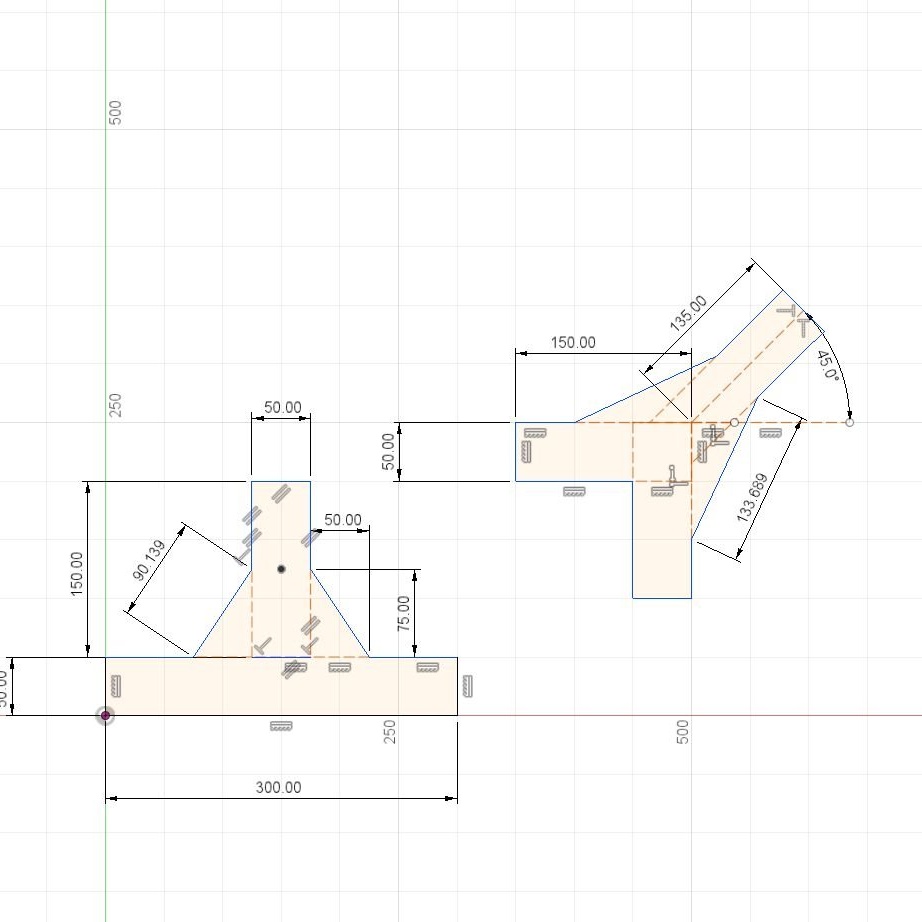
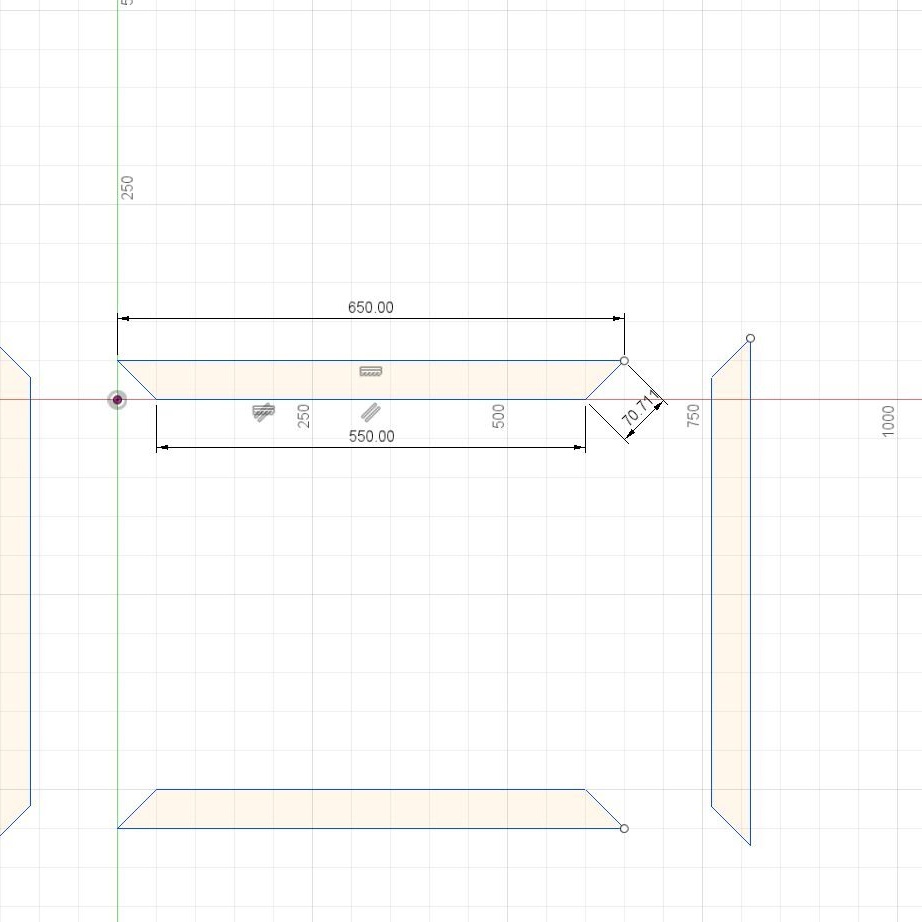
Krok czwarty: Profil przewoźnika
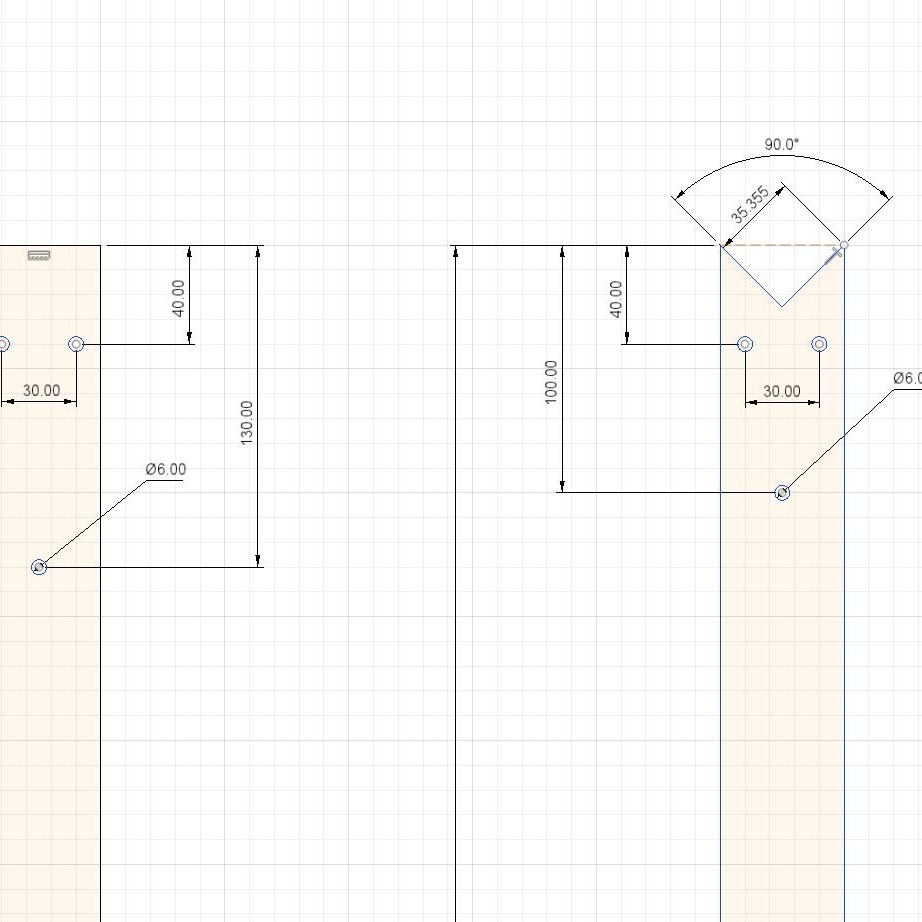
Profile te są przymocowane do wsporników, a silniki są zainstalowane na ich końcach. Profile są kwadratowe, 50 x 50 cm i mają różne długości. Profile o długości 112,5 cm są przymocowane w rogach, z boku profil ma 125 cm, wycięcie wykonuje się przy profilach kątowych pod kątem 45 stopni. Konieczne jest, aby jego powierzchnia czołowa przylegała do płaszczyzny kąta.
Aby przymocować profile do wsporników, mistrz wywierca otwory na śruby.




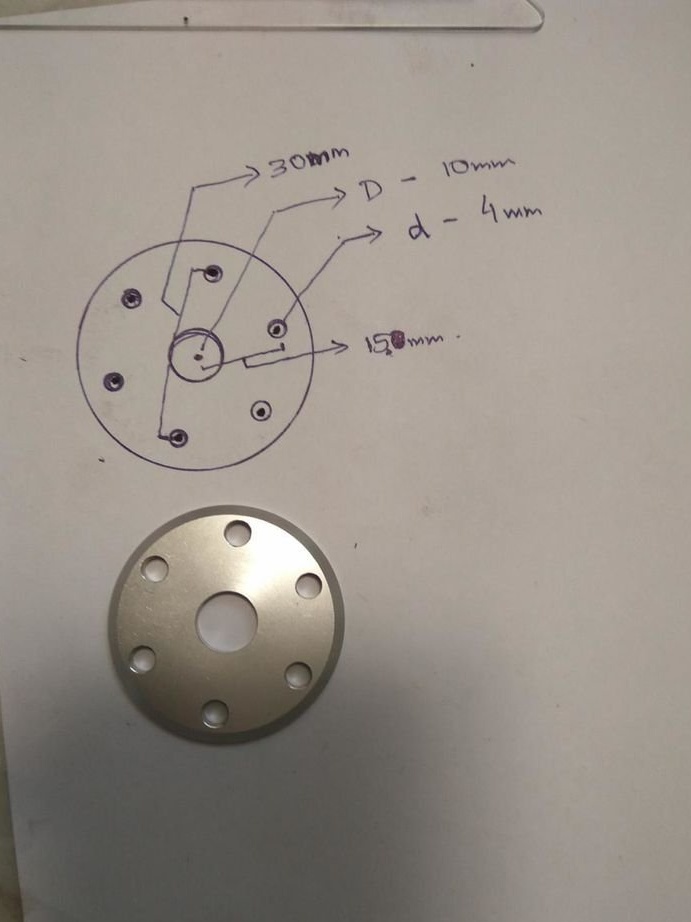
Krok piąty: mocowanie silnika
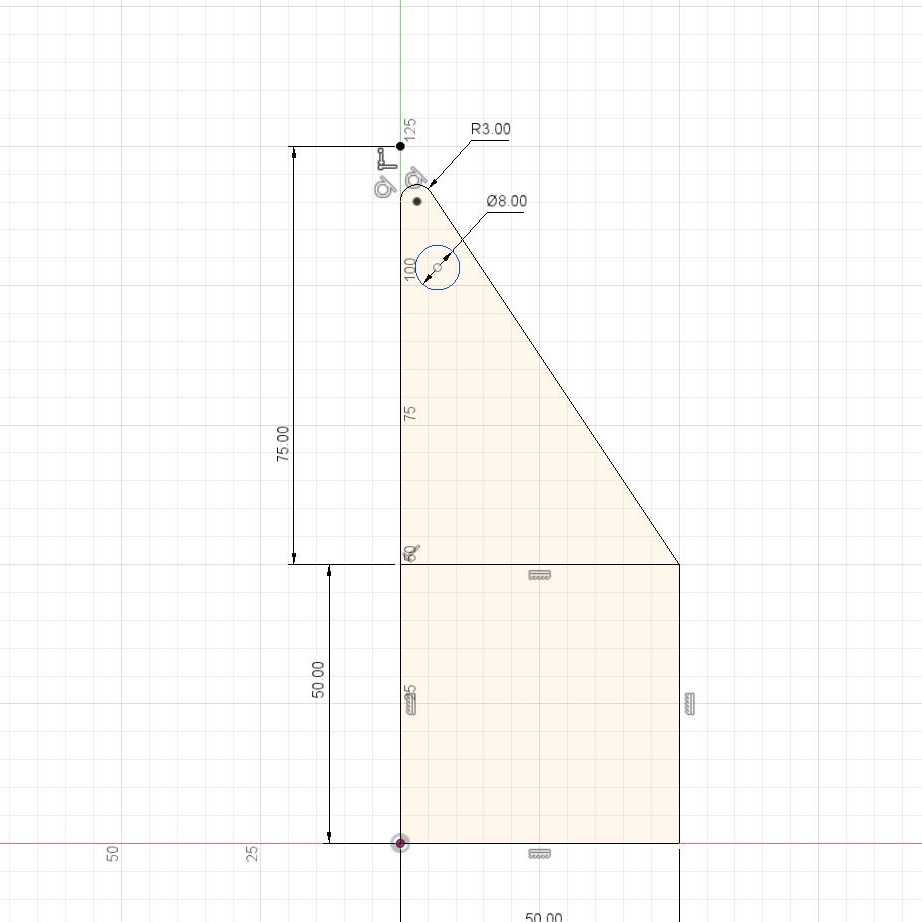
Silniki przykręcono do aluminiowej kwadratowej płyty. Od spodu płyty, równolegle do siebie, skręca się dwa rogi. Odległość między nimi jest równa szerokości profilu. Ponadto płyta z silnikiem jest zamontowana na profilu, otwory montażowe są wiercone, a wszystko jest skręcane za pomocą śrub.





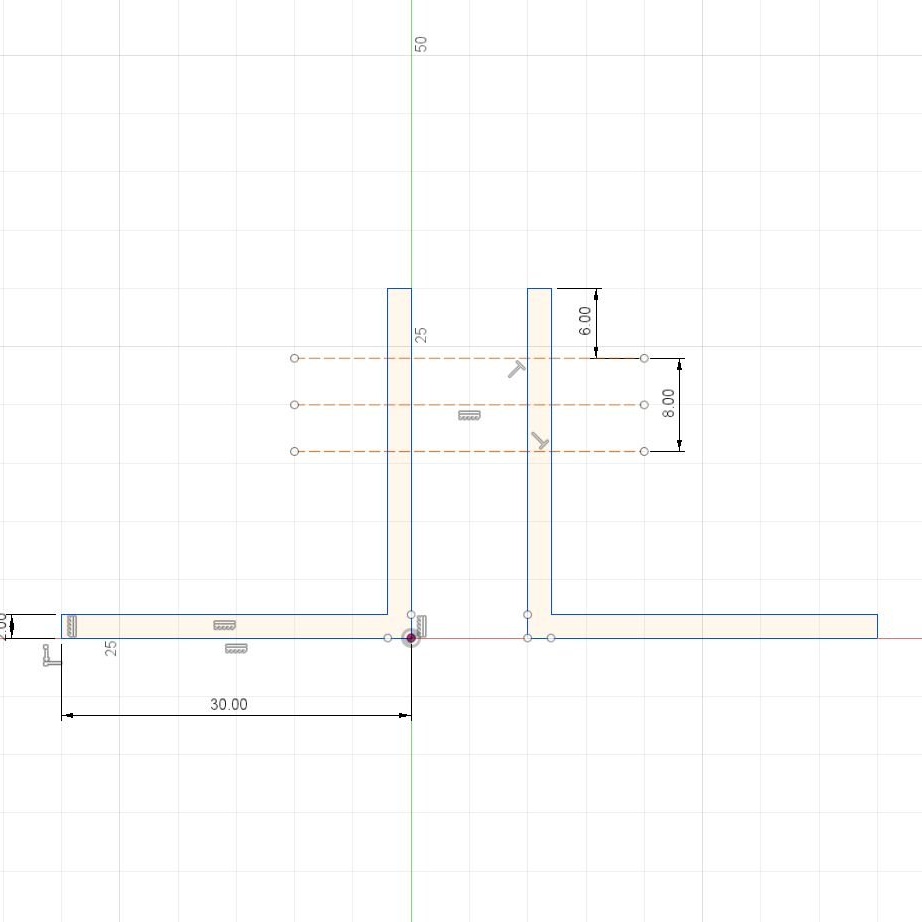
Krok szósty: Podwozie
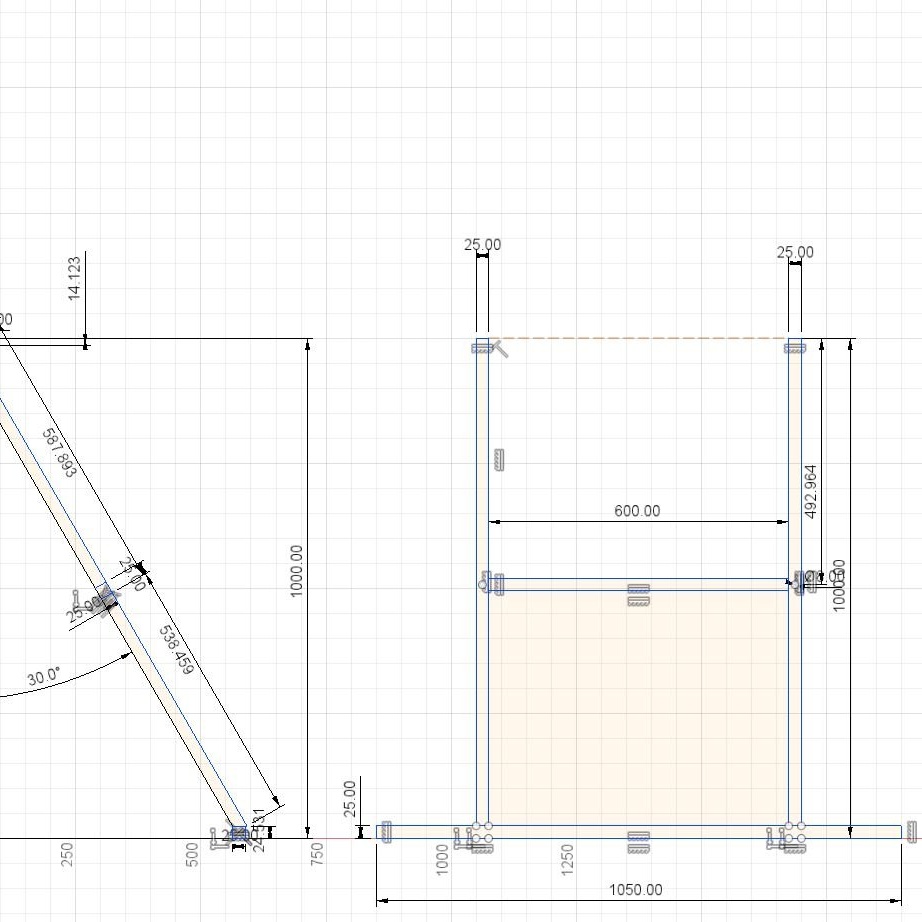
Podwozie zostało wykonane z profili aluminiowych 25 x 25 mm i grubości 3 mm. Wszystkie części zostały przyspawane, a ich rozmiary widać na zdjęciu. Pomysł polegał na zamontowaniu podwozia z kosza pod kątem 30 stopni. Aby zapobiec uszkodzeniu podwozia, kable podtrzymujące są przeciągane między nimi.


Krok siódmy: Wspieranie profili wsparcia
Po zainstalowaniu silników profile nośne zaczęły się wyginać. Następnie mistrz próbował uruchomić silnik i dowiedział się, że profile „chodzą”. Konieczne było wzmocnienie projektu.
Dodanie płytek spowodowałoby zbyt duży ciężar konstrukcji. Następnie mistrz postanowił wykonać projekt w kształcie litery V od kosza do dołu. Liny są przymocowane do dolnej części. Pozostałe końce kabli są przymocowane do wsporników na środku profili nośnych. Kable są ciągnięte za pomocą wciągnika. W ten sposób struktura staje się sztywna.















Krok ósmy: Połącz
Najpierw mistrz lutuje złącza na końcach przewodów.


Następnie rozpoczyna się instalacja. Każdy silnik musiał zostać sprawdzony pod kątem kierunku obrotu. Jeśli to konieczne, łatwo jest zmienić kierunek obrotu silnika, a odpowiednio śrubę, zamieniając dwa z trzech drutów wychodzących z ESC do silnika. Po prawidłowym podłączeniu wszystkich silników kreator wykonał instalację zgodnie ze schematem połączeń od producenta.
Kontrolery lotu IMU DJI A3 są bardzo wrażliwe na zakłócenia powodowane przez metale, a kapitan nie był w stanie skonfigurować systemu z powodu zakłóceń. W rezultacie mistrz zastąpił A3 modelem Naza M V2, który miał podobny schemat połączeń. Naza M V2 działała bardzo niezawodnie.
Następnie kreator łączy baterie. Na każdym profilu nośnym dwa akumulatory 22,2 V są połączone szeregowo.



Krok dziewiąty: Miejsce pilota
Siedzisko zostało zszyte z wytrzymałego materiału. Ponadto do pilota przymocowany jest pas bezpieczeństwa, który jest przymocowany do ramy, oraz kask.






Krok dziesiąty: pierwszy lot
Przed lotem pilota na oktokopterze przeprowadzono kilka testów z workiem z piaskiem, a następnie z modelem osoby. Podczas lotu symulowano różne sytuacje, od utraty kontroli po podmuch wiatru.
Po wszystkich testach pilot w końcu poleciał w powietrze.






Przed lotem musisz wykonać następujące czynności.
Sprawdź dokręcenie śrub, kabli, mocowania silnika.
Sprawdź okablowanie.
Sprawdź, czy śruby łatwo się obracają.
Upewnij się, że wszystkie ESC są wyłączone.
Upewnij się, że wszystkie akumulatory są bezpiecznie podłączone i naładowane.
Podłącz zasilanie do kontrolera lotu w celu inicjalizacji i kalibracji.
Po podłączeniu do GPS przełączy się w tryb w pełni automatyczny (Alt. + Att. Hold).
Usiądź na fotelu pilota i zapnij pasy.
Podłącz wszystkie baterie do ESC.
Połącz dwa akumulatory szeregowo (ESC-RB-RB-ESC) za pomocą rezystora, aby wyeliminować iskrę.
Włącz silniki, przekręcając przełącznik do pozycji włączenia.
Użyj kontrolera do sterowania oktokopterem.