Dzisiaj chcę podzielić się moim następnym domowej roboty. Opiera się na Lego i Arduino. Do kontroli użyjemy pilota z nadajnikiem 433 MHz. Tym razem chciałem się ścigać samochód. Kontynuuj:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Serwo SG-90
- Moduł komunikacji radiowej 433 MHz
- Reduktor silnika 200 obr./min, o średnicy wału 3 mm
- 2 diody LED
- 2 rezystory 150 omów
- Kondensator 10v 1000uF
- 2 grzebienie jednorzędowe PLS-40
- 2 złącza PBS-20
- Cewka 68mkGn
- 6 akumulatorów NI-Mn 1,2v 1000mA
- Złącze tata-mama dwa piny do drutu
- Homutik
- Przewody o różnych kolorach
- lutowane
- Kalafonia
- lutownica
- Śruby 3x40 oraz nakrętki i podkładki do nich
- Śruby 3x20
Krok 1 zmontuj obudowę.
Konieczne jest zmontowanie naszej maszyny zgodnie z instrukcjami Lego 42022 druga opcja z pewnym dopracowaniem. Wykonujemy wszystkie czynności od strony 3 do 6. Nie potrzebujemy mechanizmu przekładniowego. Silnik Lego również nie musi być montowany. Potrzebne będą jednak mocowania silnika zebrane na stronach 14-19, z wyjątkiem kół zębatych i wałów. Następnie zbieramy wszystko od stron 20 do 74, z wyjątkiem dźwigni na stronie 25.
Krok 2 zmechanizuj ciało.
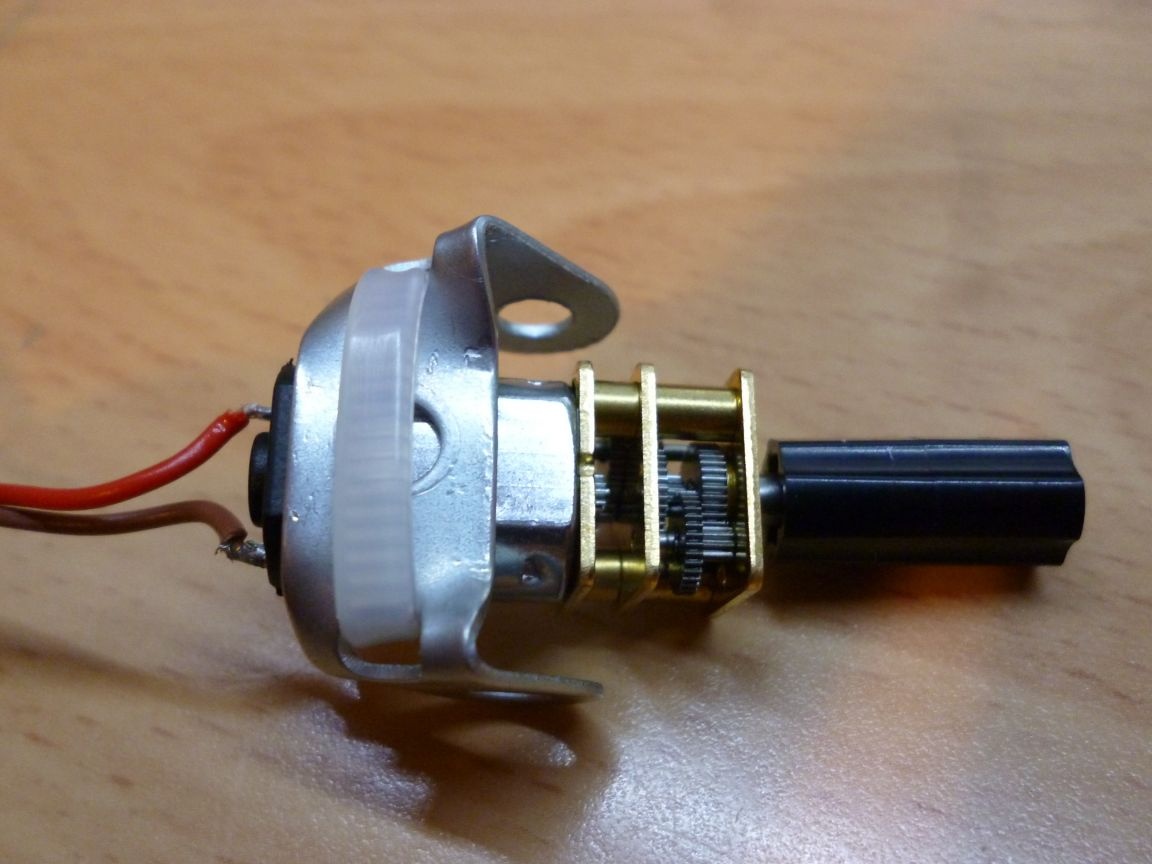
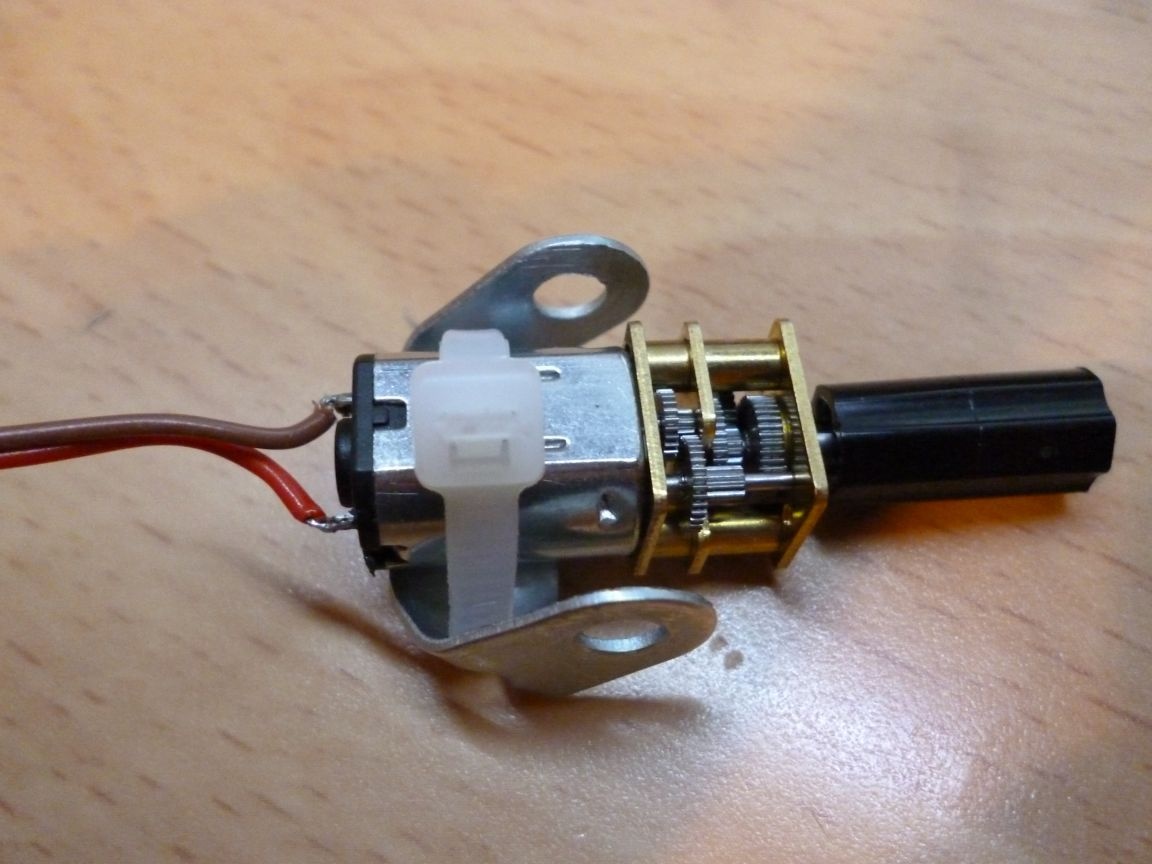
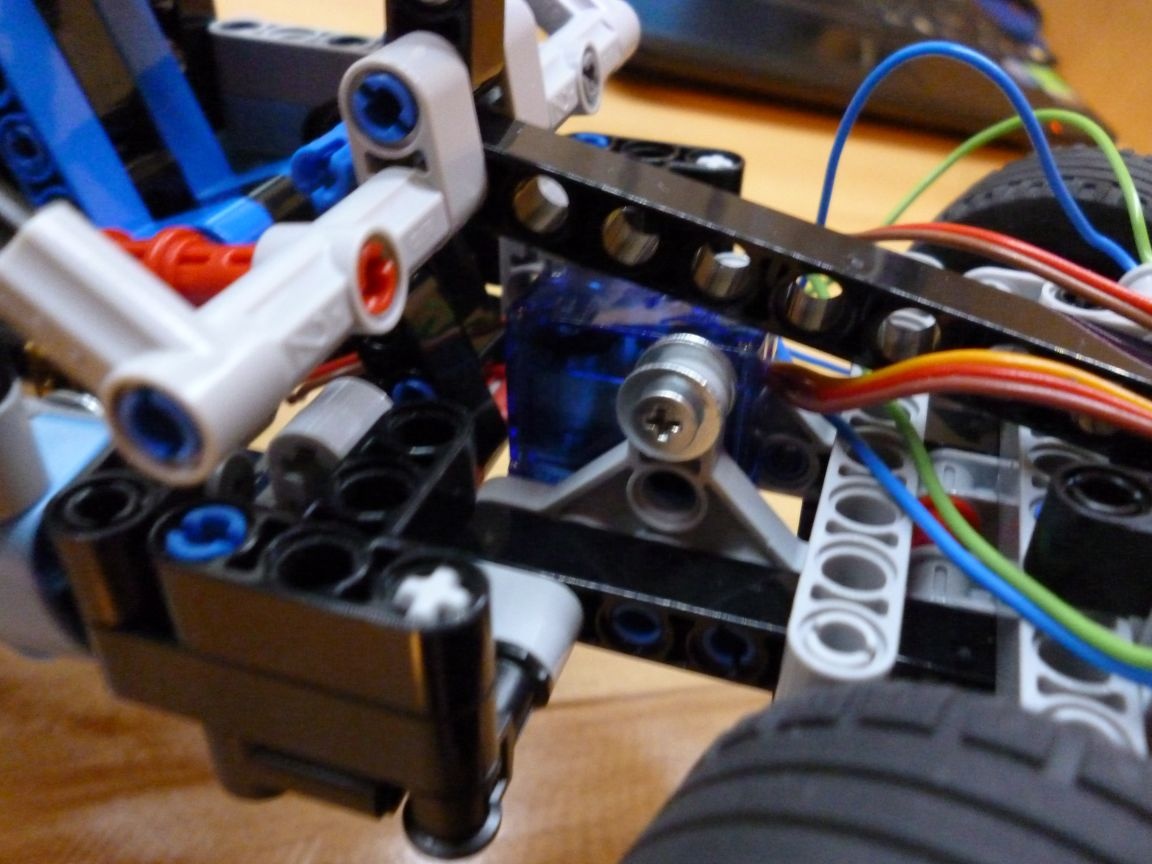
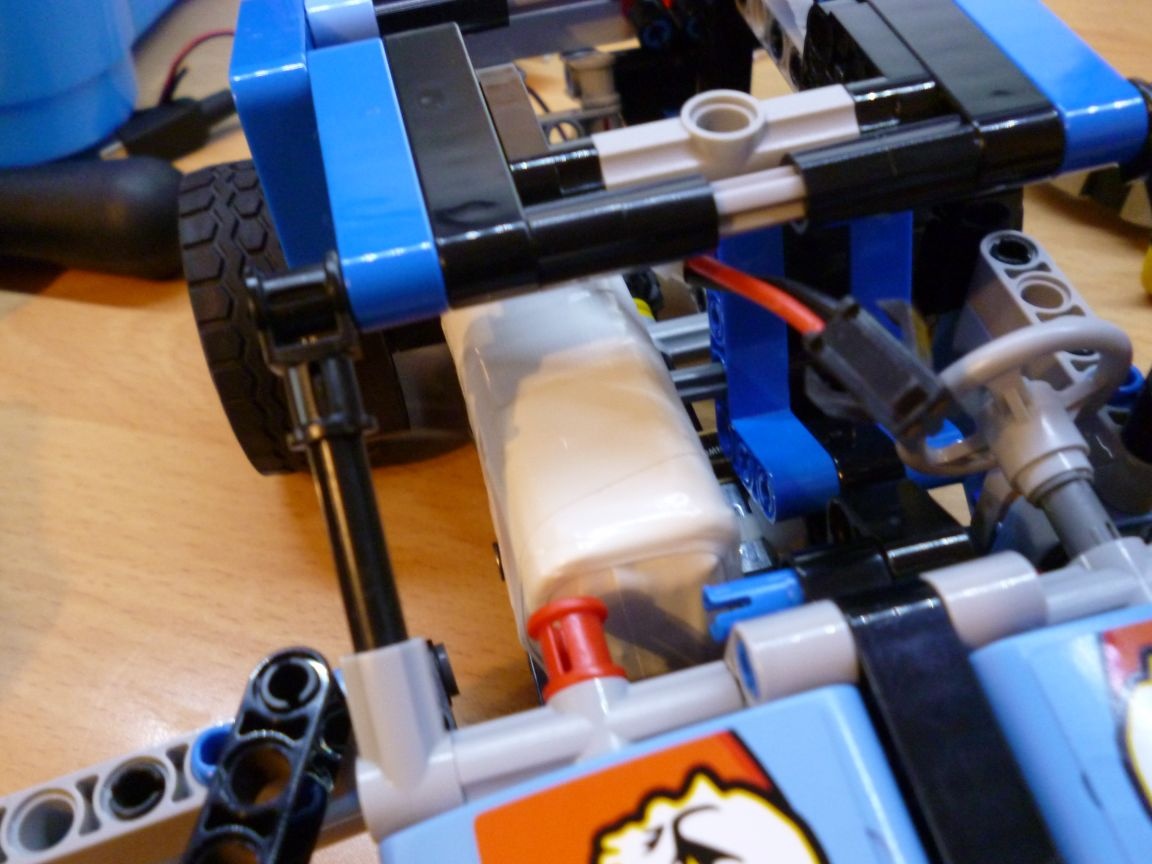
Uruchom naszą model powstanie motoreduktor o prędkości 200 obr / min. Może być używany z innym przełożeniem. Ale moim zdaniem jest to najlepsza opcja. Przy 100 obr / min - zbyt wolno, 300 obr / min - nie ma wystarczającej mocy, a silnik jest bardzo gorący. Na wale motoreduktora załóż tuleję łączącą „Legovskaya” i zabezpiecz ją przed przekręceniem zapałki za pomocą listwy. Aby naprawić nasz silnik na modelu, konieczne jest zgięcie części z metalowego konstruktora za pomocą litery „P” i przymocowanie motoreduktora do płyty za pomocą zacisku. Wynik powinien być następujący:
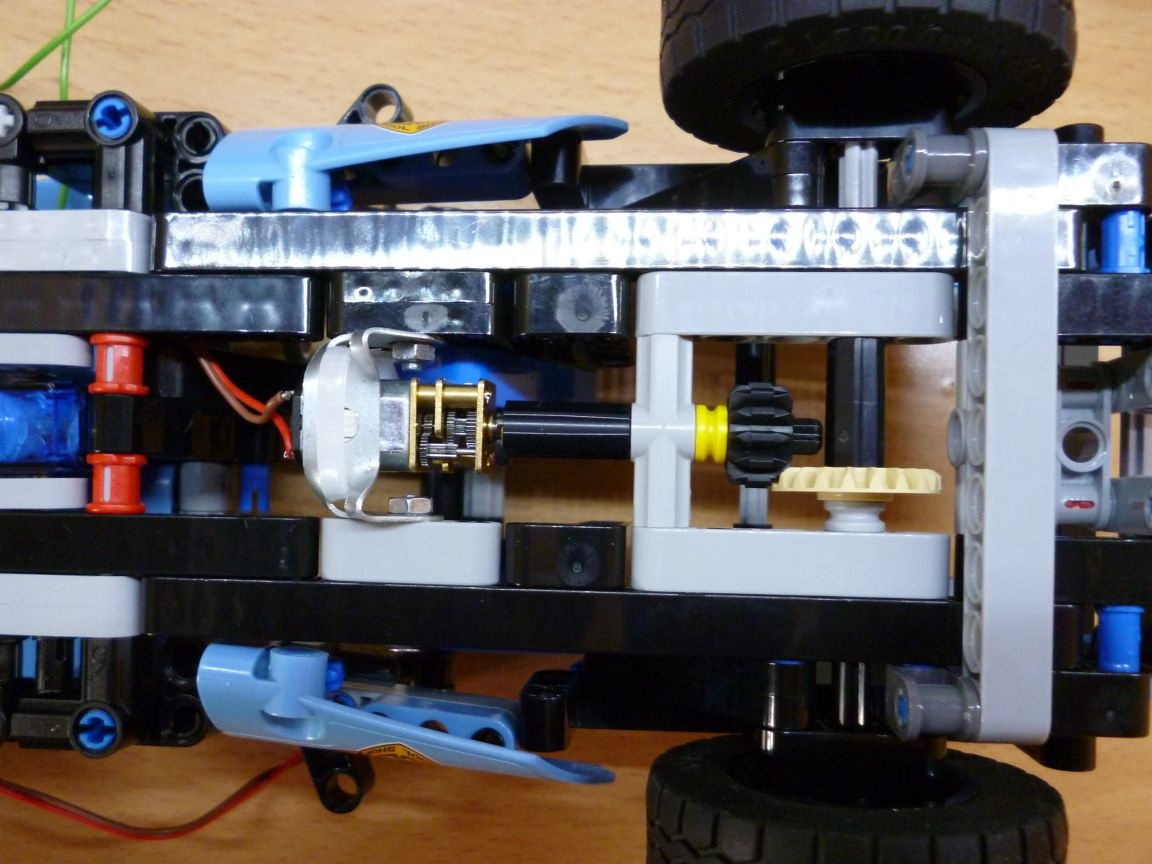
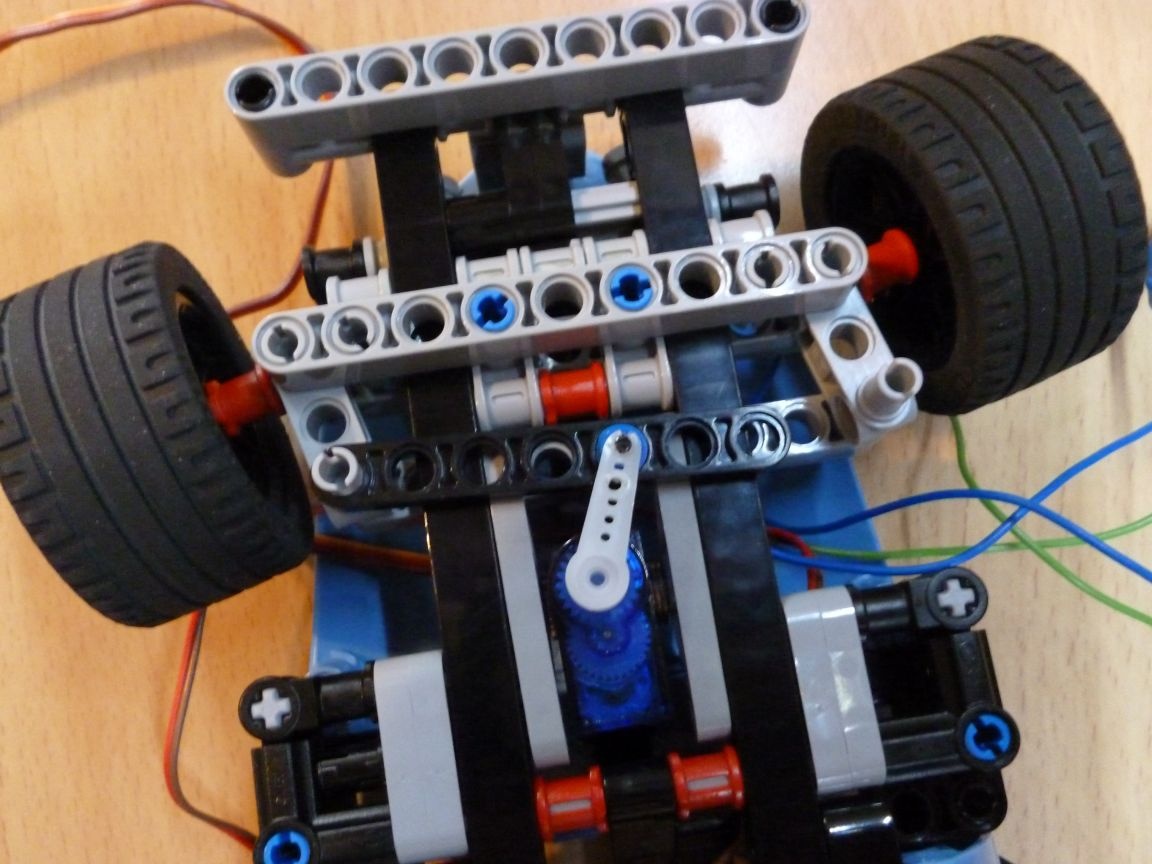
Za pomocą śrub 3x20 mocujemy nasz silnik do modelu. Nie dokręcaj zbyt mocno! W przeciwnym razie możesz uszkodzić części konstruktora Lego. W modelu wygląda to tak:
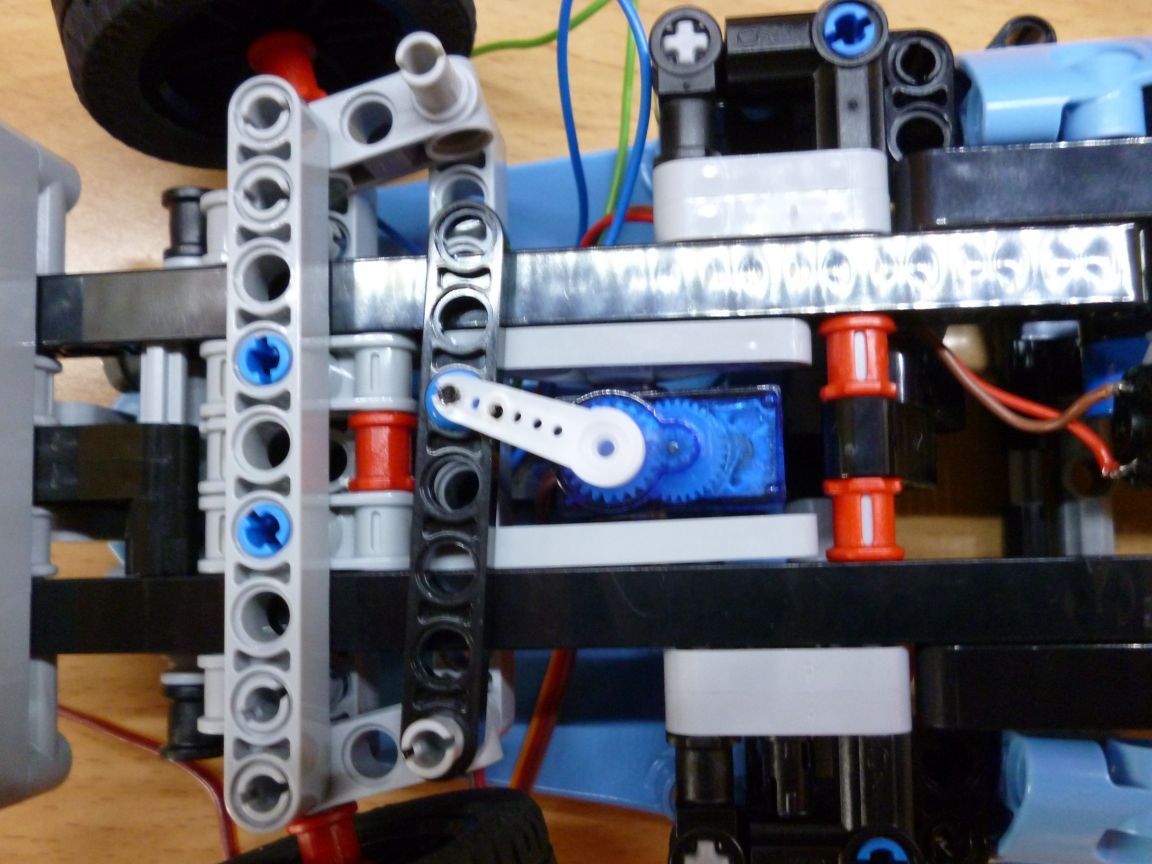
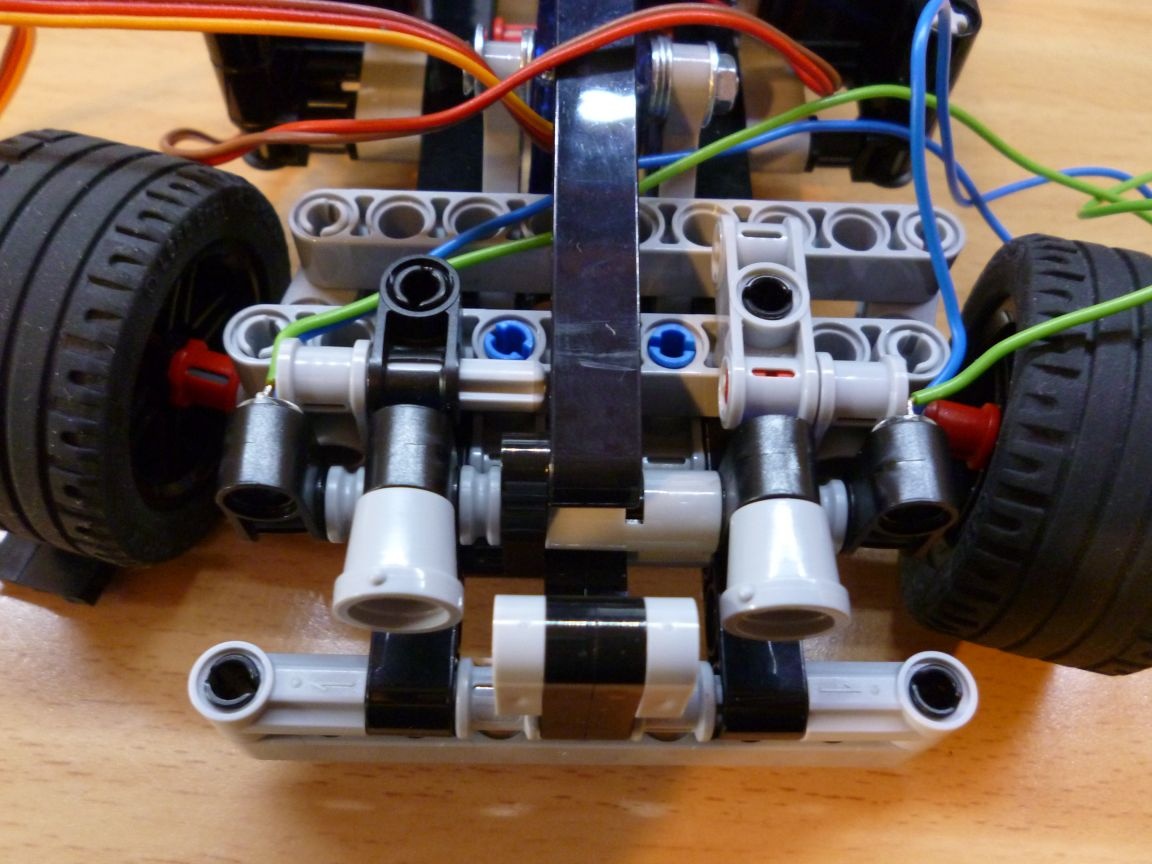
Aby skręcić, weź lekko zmodyfikowane serwo SG-90. Obudowę należy dokładnie wywiercić, aby nie dotknąć wewnętrznych części, otworu przelotowego o średnicy 3,2 mm lub po prostu przeciąć nożem biurowym.

Wkładamy śrubę do wykonanego otworu, a na krawędziach nakładamy na trójkątne płytki i mocujemy za pomocą nakrętek. Wkładamy dźwignię na wałek serwa i mocujemy część do dźwigni Lego. Na maszynie do pisania wygląda to tak:
Krok 3 jest elektrykiem.
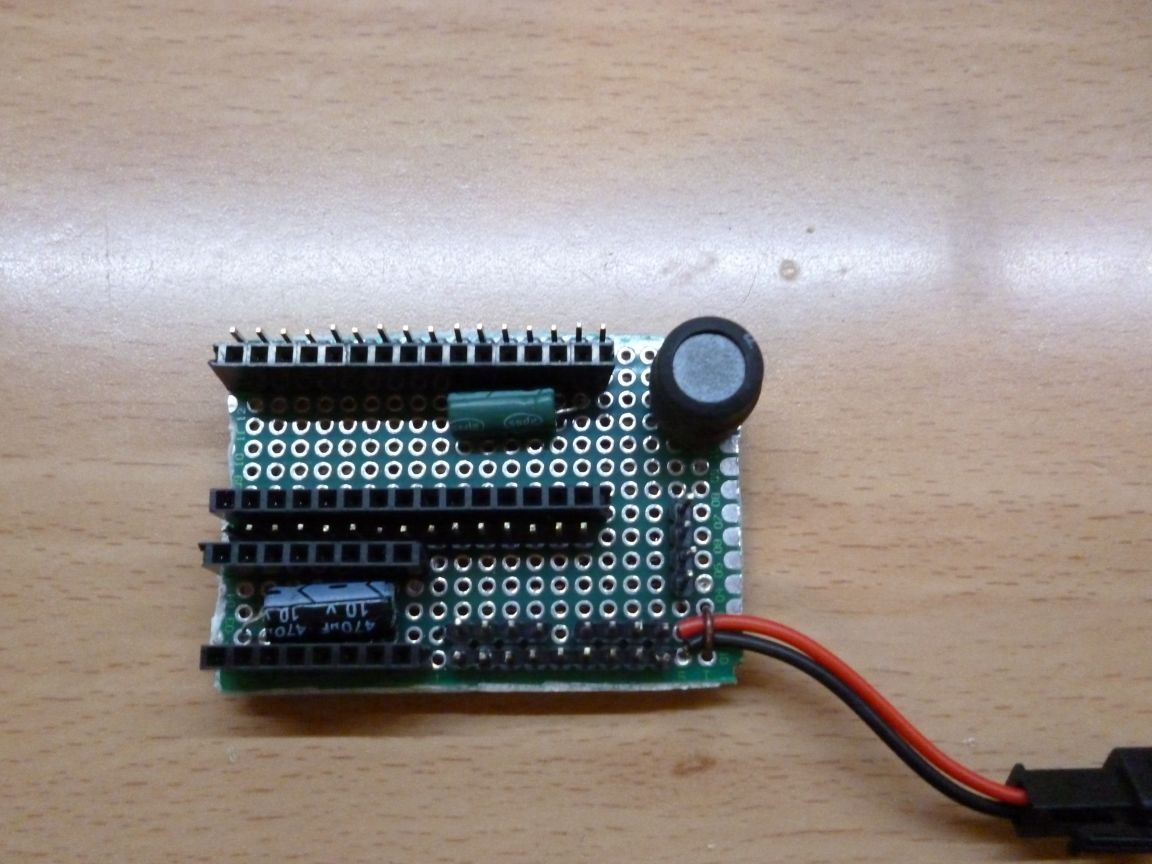
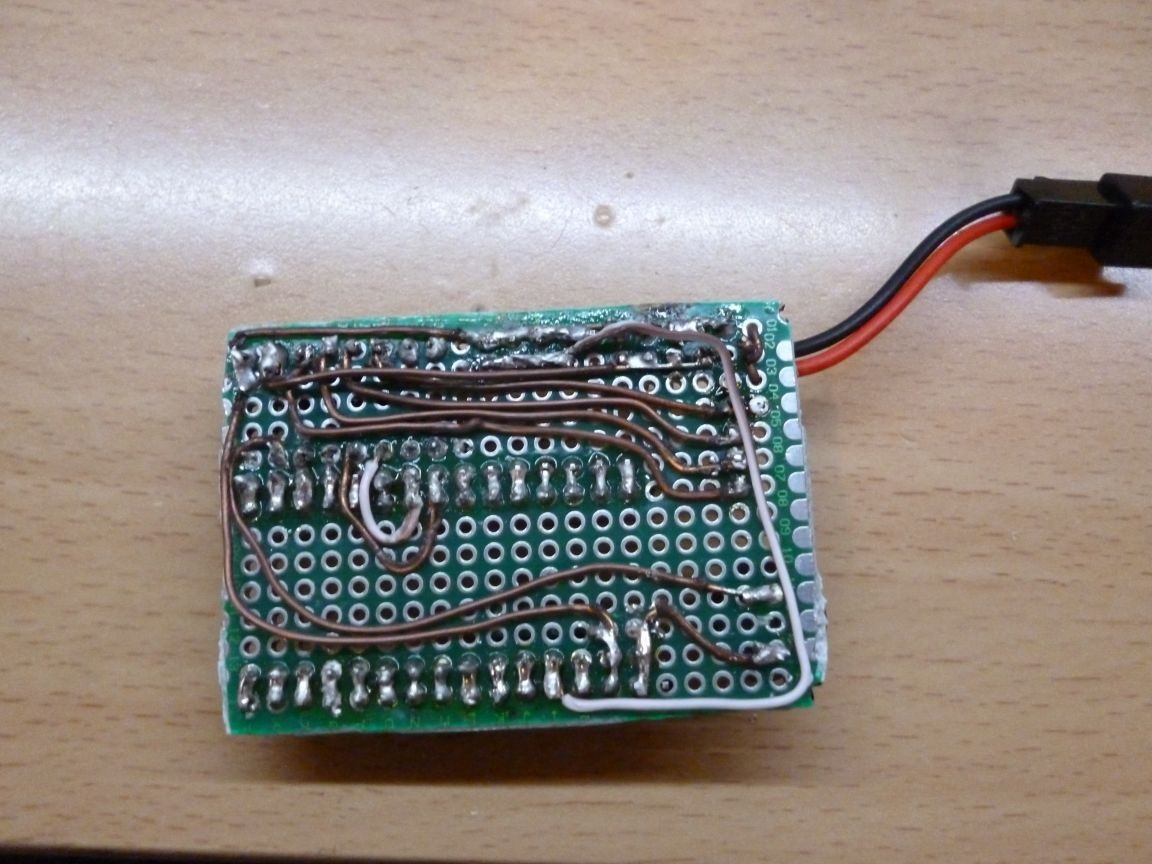
Lutownica w ręku i gotowe. Wszystkie elementy elektryczne można zmontować po prostu podłączając przewody montażowe. Jest to jednak niewygodne, ponieważ wymaga dużo miejsca. Ponadto istnieje wysokie prawdopodobieństwo kontaktu niskiej jakości. Dlatego lepiej lutować wszystko na płytce drukowanej zgodnie z następującym schematem:
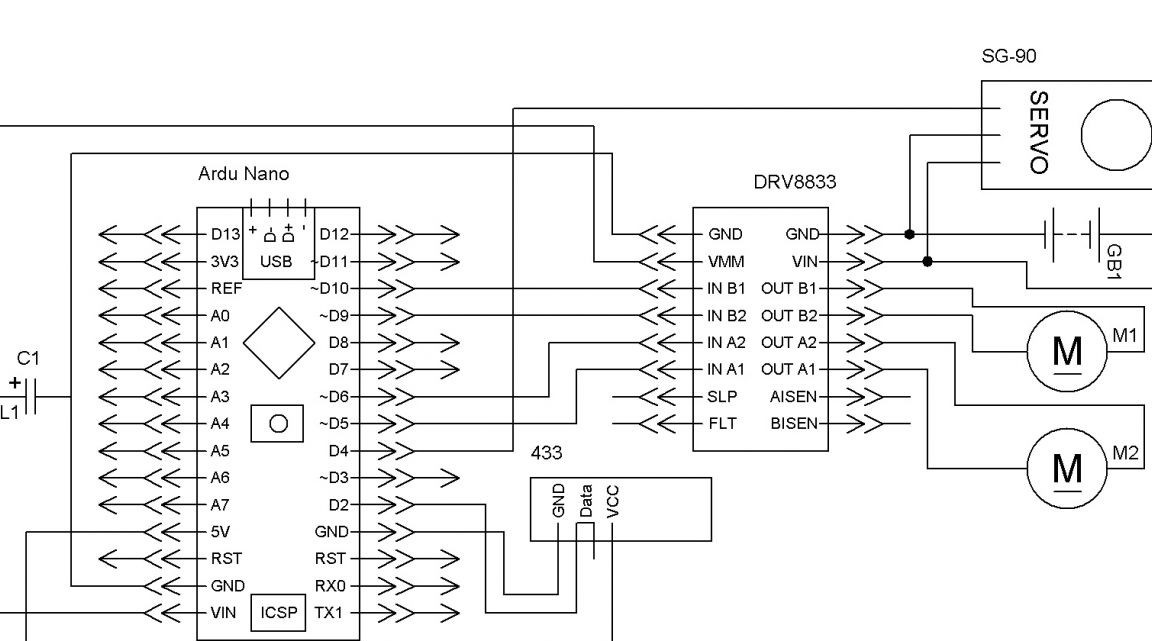
Przyniosę trochę jasności: możesz wziąć dowolny kondensator małej mocy, możesz także znaleźć cewkę dowolnego rodzaju, jest to konieczne do ustabilizowania napięcia mikrokontrolera. Antena musi być przylutowana do odbiornika. Mam następujące:
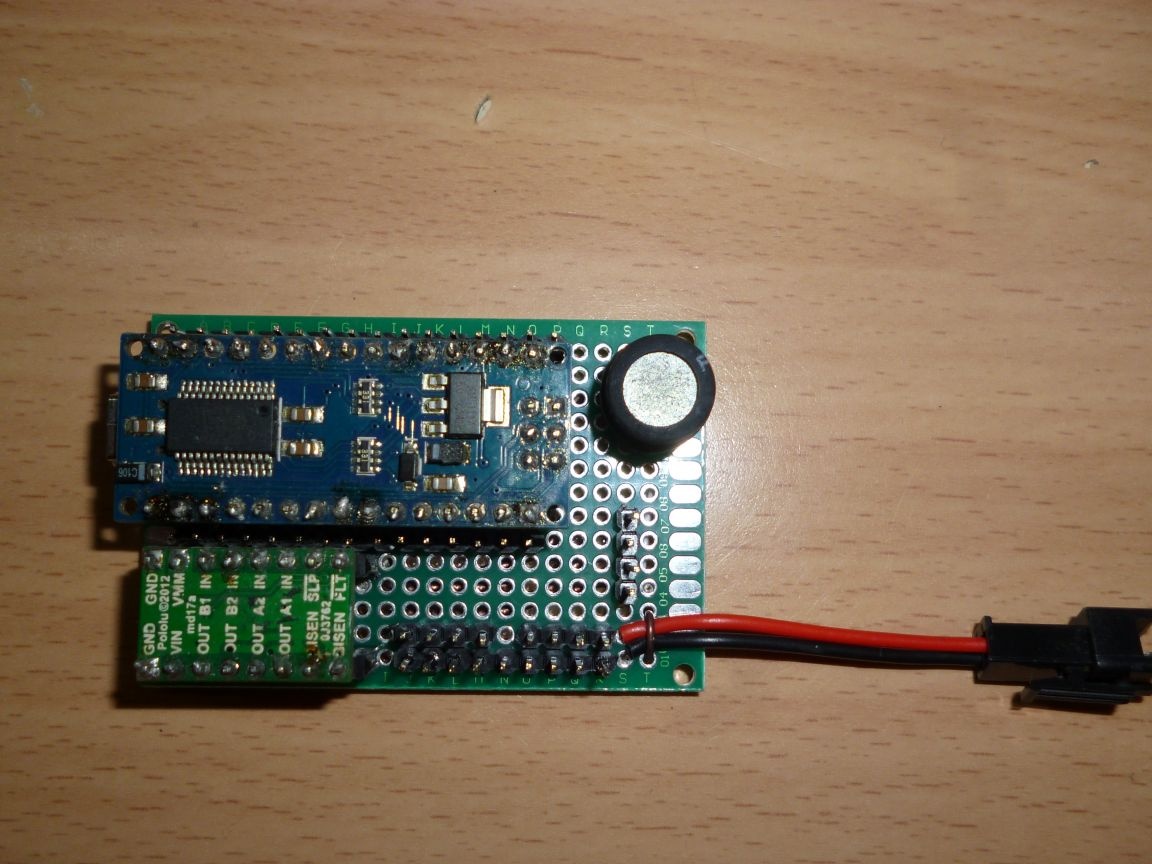
W ich miejsce umieszczamy Arduino Nano i DRV 8833:
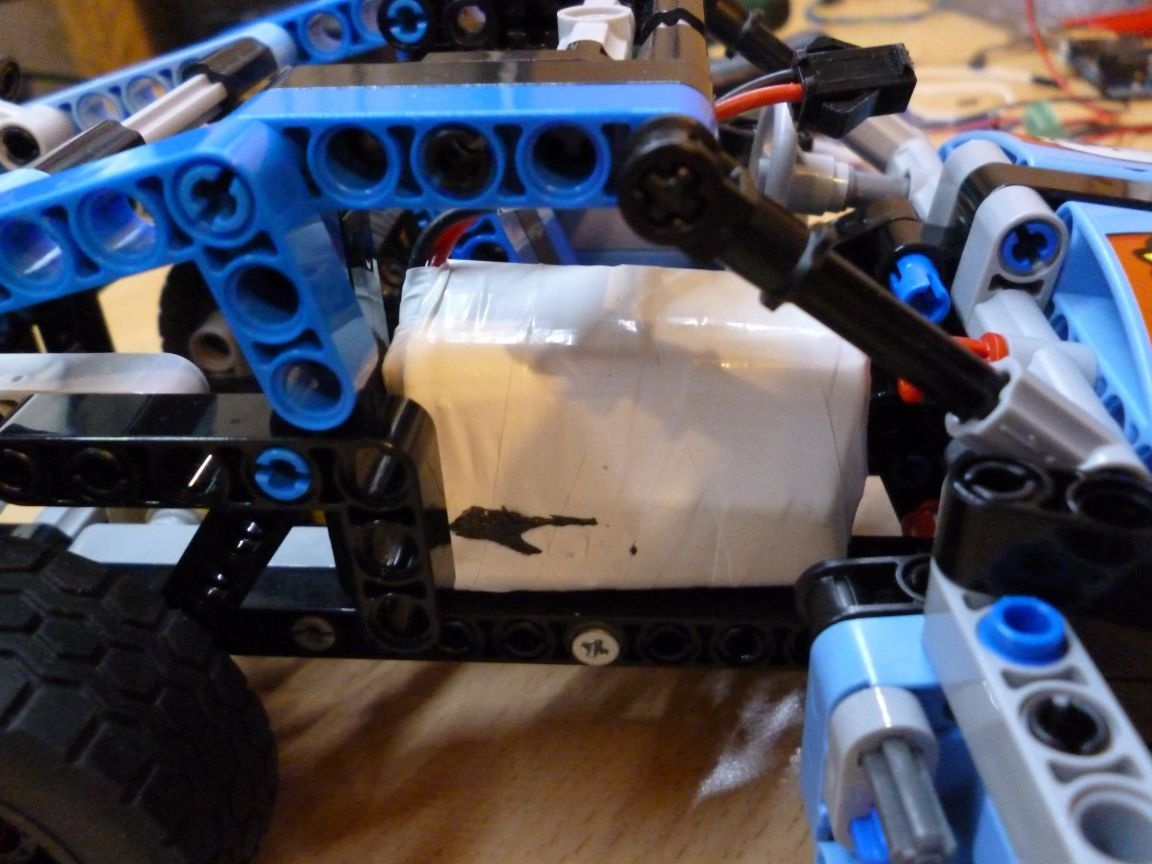
Do zasilania wykorzystamy 6 akumulatorów Ni-Mn 1,2v 1000mA, lutowanych szeregowo i zwijanych taśmą elektryczną. Przyklej je na siedzeniu pasażera z dwustronnej taśmy samoprzylepnej.

Łączymy wszystko zgodnie ze schematem i instalujemy z tyłu urządzenia. Możesz także dodać kilka diod LED. Umieść je w reflektorach i podłącz do styku 14 (A2).
Krok 4 oprogramowanie układowe.
Do napisania oprogramowania użyłem Arduino IDE. Obecna wersja w chwili pisania tego tekstu to 1.8.1. Wygodne jest zaimplementowanie protokołu komunikacyjnego z wykorzystaniem modułu 433 MHz z wykorzystaniem biblioteki rc-switch-2.52. Musisz go pobrać i dodać do folderu „bibliotek” w Arduino IDE.
Podłączamy Arduino i flashujemy go za pomocą następującego oprogramowania:
Aby przetestować wydajność naszego modelu, potrzebujemy drugiej płytki Arduino. Konieczne jest podłączenie nadajnika radiowego 433 MHz do drugiej płyty. Nadajnik jest podłączony w następujący sposób:
VCC (nadajnik) do 5+ (Arduino),
GND do GND,
DANE do D10.
Napisz tam zmodyfikowany szkic SendDemo. Jest to w przykładach w zainstalowanej bibliotece i służy do wysyłania poleceń. Przed flashowaniem szkicu należy go nieco zmienić, a mianowicie zmienić przesłane polecenia. W zależności od tego, co musisz sprawdzić, napisz następujące polecenia do linii wysyłania:
„1” - ruch do przodu (napisz polecenie bez cudzysłowów!)
„2” - ruch do tyłu
„15” - kropka
„3” - obróć kierownicę w lewo
„4” - obróć kierownicę w prawo
„5” - ustaw kierownicę na środku
„10” - włącz reflektory
„11” - wyłącz światła przednie
Tworzenie pilota za pomocą nadajnika radiowego 433 MHz to temat na osobny artykuł. Zdecydowanie napiszę instrukcje dotyczące produkcji takiego pilota.
Chcę powiedzieć, że ta opcja jest odpowiednia dla prawie każdego modelu samochodów Lego. Wystarczy połączyć wszystkie mechaniki i znaleźć miejsce na planszę. A jeśli uwzględnisz fantazję, możesz zmechanizować dowolny model.