


Brałem udział w moim projekcie z instrukcji montażu Lego Technic 42029. Reszta to moja improwizacja. Potrzebujemy więc:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (lepszy niż Populus, ale możesz też mieć chińskiego odpowiednika)
- 2 serwonapędy SG-90
- odbiornik IR
- Skrzynia biegów silnika 200 obr./min
- 2 diody LED
- 2 rezystory 150 omów
- Kondensator 10v 1000uF
- 2 grzebienie jednorzędowe PLS-40
- 2 złącza PBS-20
- Cewka 68mkGn
- 6 akumulatorów NI-Mn 1,2v 1000mA
- Złącze tata-mama dwa piny do drutu
- Homutik
- Przewody o różnych kolorach
- lutowane
- Kalafonia
- nóż biurowy
- lutownica
- Śruby 3x40 oraz nakrętki i podkładki do nich
- Śruby 3x60
- Baterie Ni-Mn 1.2v 1000mA 6szt.
Krok 1 odbieramy tył zawieszenia.
Najpierw musisz złożyć tył zawieszenia zgodnie z instrukcjami Lego 42029 część 1, zaczynając od 3 stron i 8 włącznie. Następnie dodaj kilka szczegółów, aby zainstalować silnik i skrzynię biegów.

Przednie zawieszenie kroku 2.
Montujemy przednią część zawieszenia zgodnie z instrukcjami Lego 42029 część 1, od strony 21 do 23. Bierzemy trapezoid z drugiej części instrukcji Lego od strony 6 do 11. Montujemy wciągarkę z drugiej części strony 14 - 22. A druga część zderzaka ma 34-36 stron.
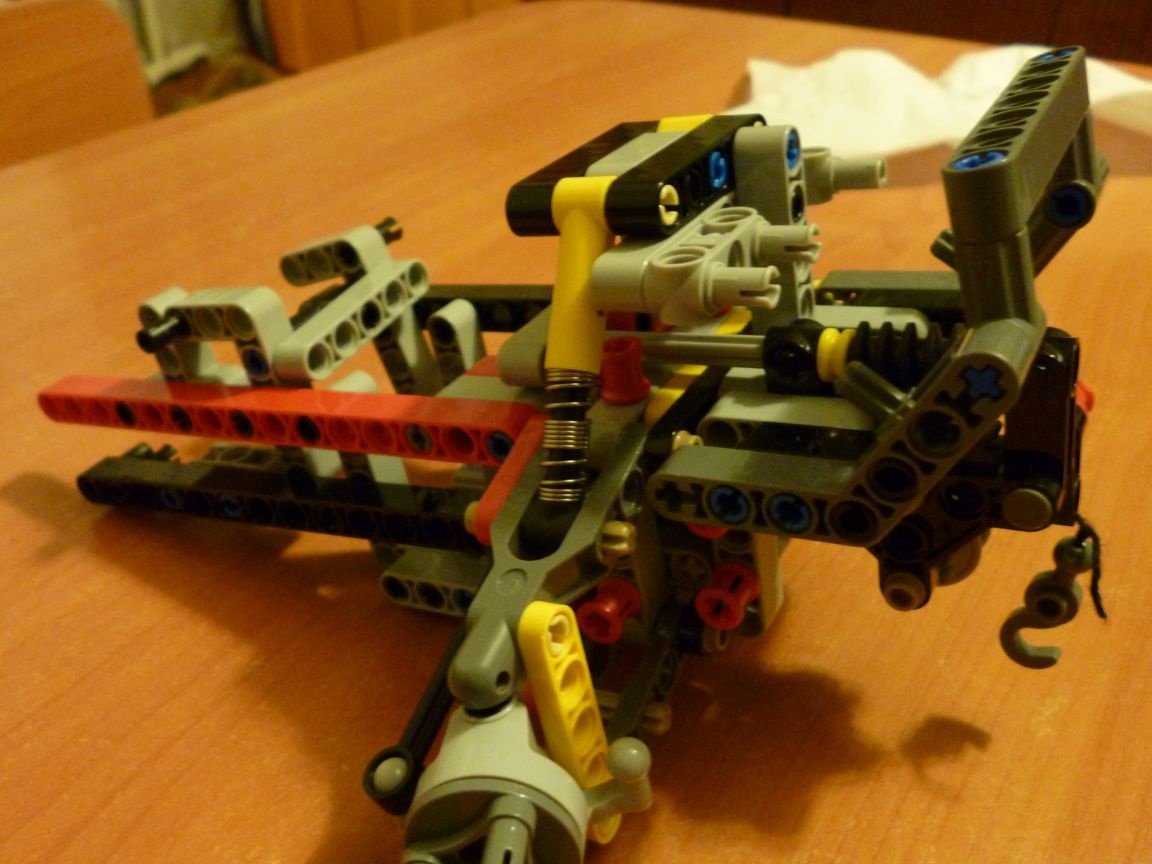
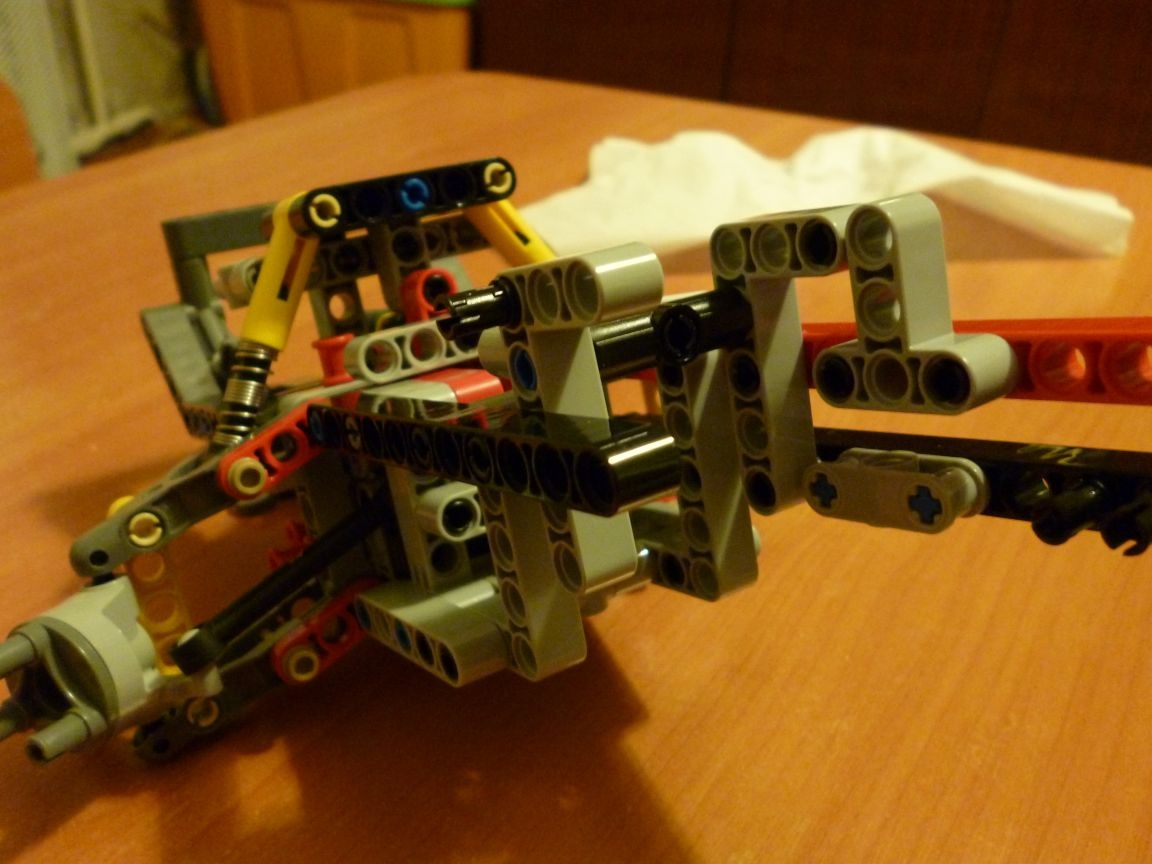
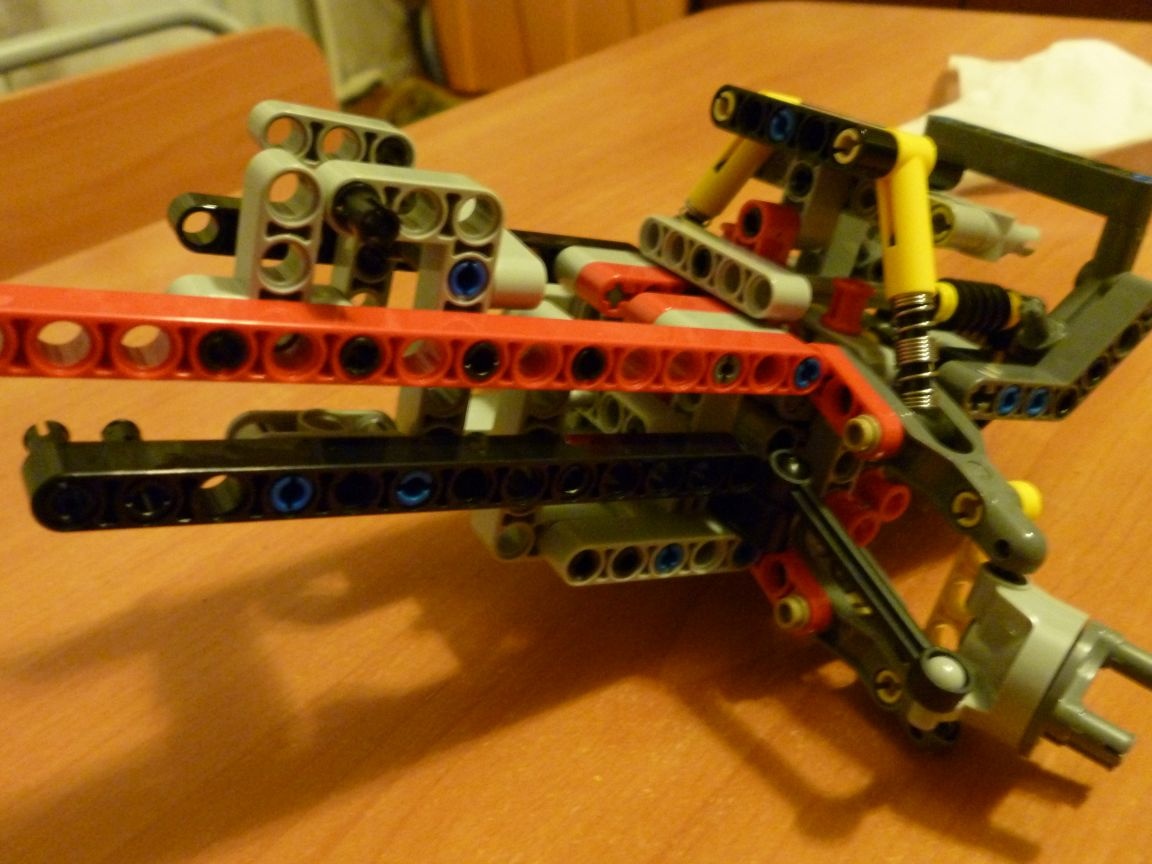

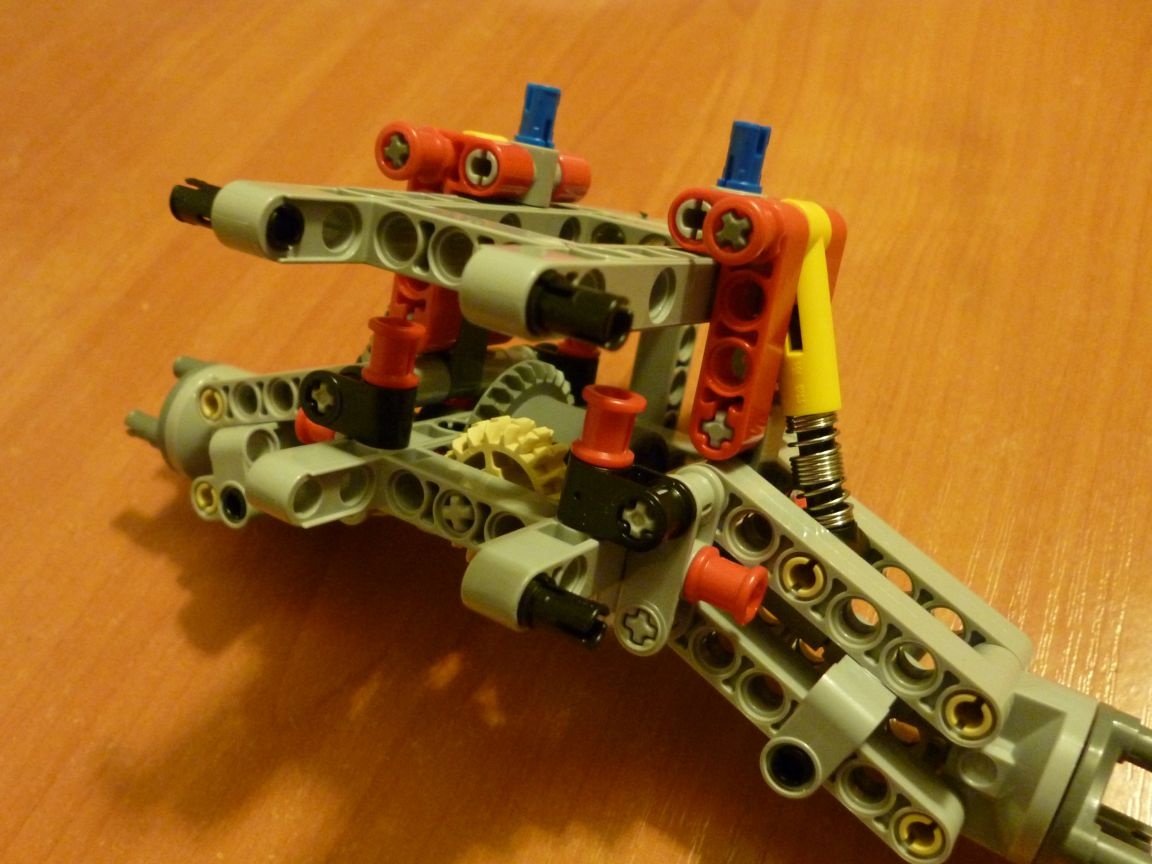
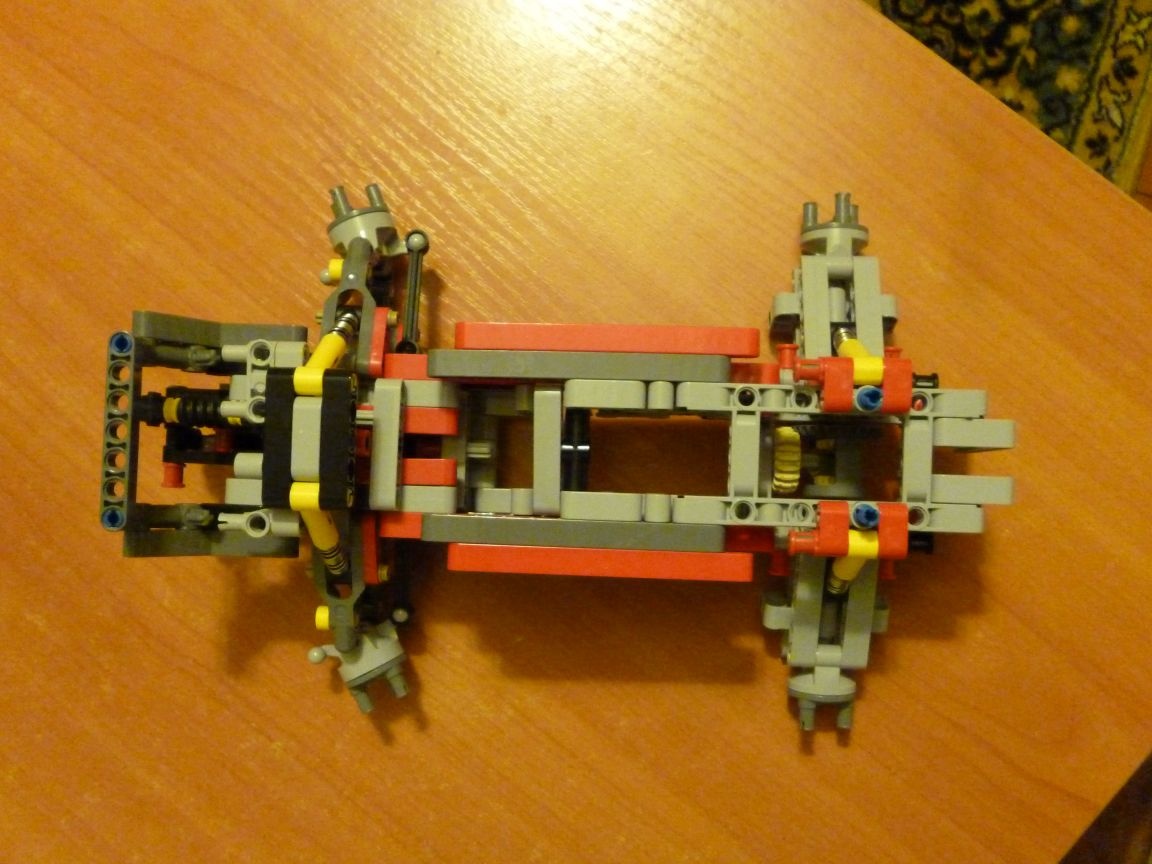
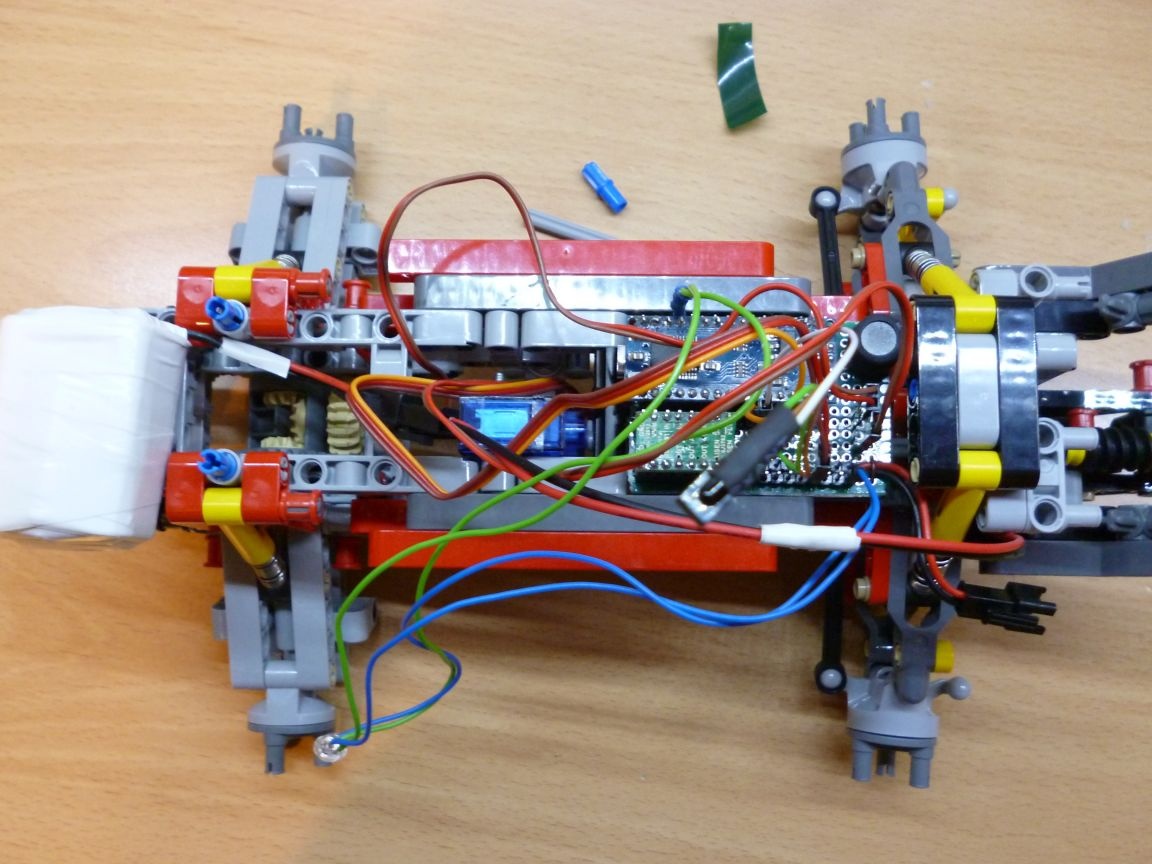
Krok 3 zmontuj podwozie.
Łączymy obie części, jak pokazano na zdjęciu:

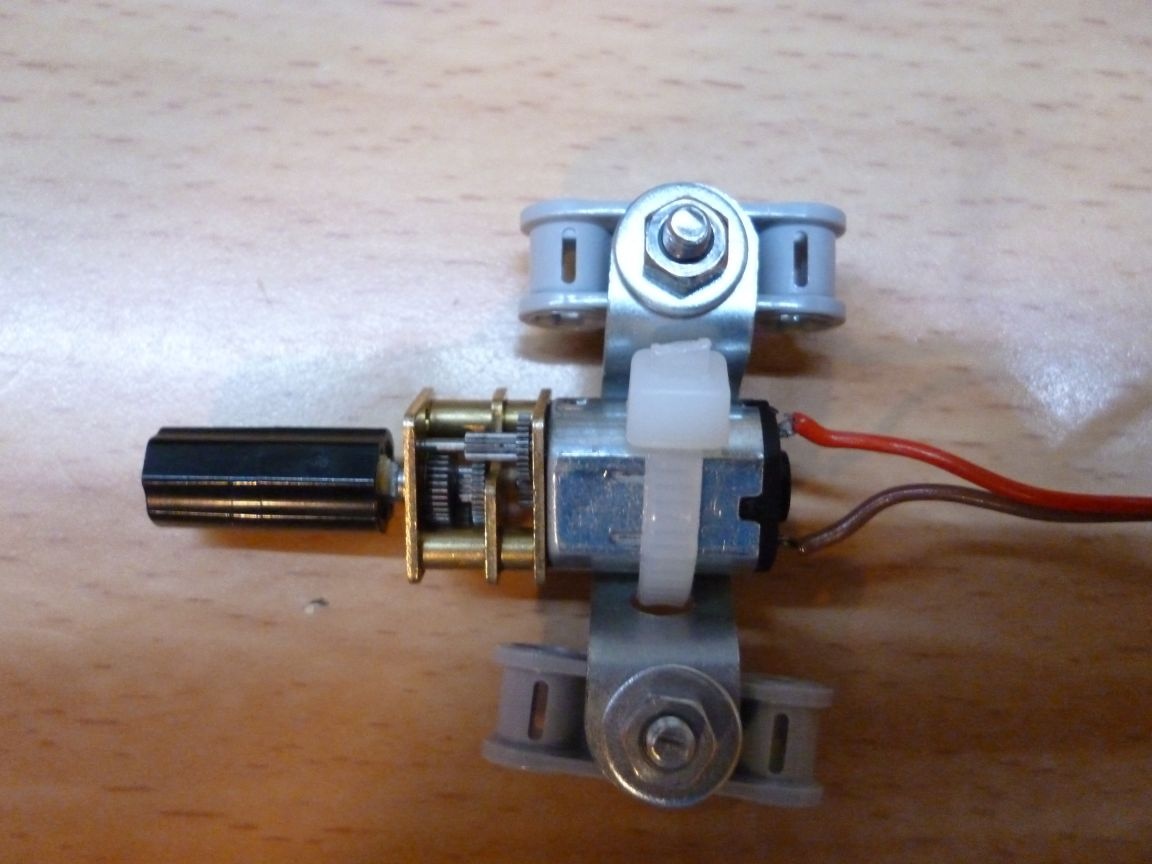
Problem połączenia motoreduktora z częściami projektanta rozwiązałem w następujący sposób: położyłem tuleję łączącą na osi motoreduktora i włożyłem zapałkę do zamocowania. Do montażu motoreduktora zastosowano metalowy plastik od żelaznego projektanta i zacisk.
Okazało się, że:
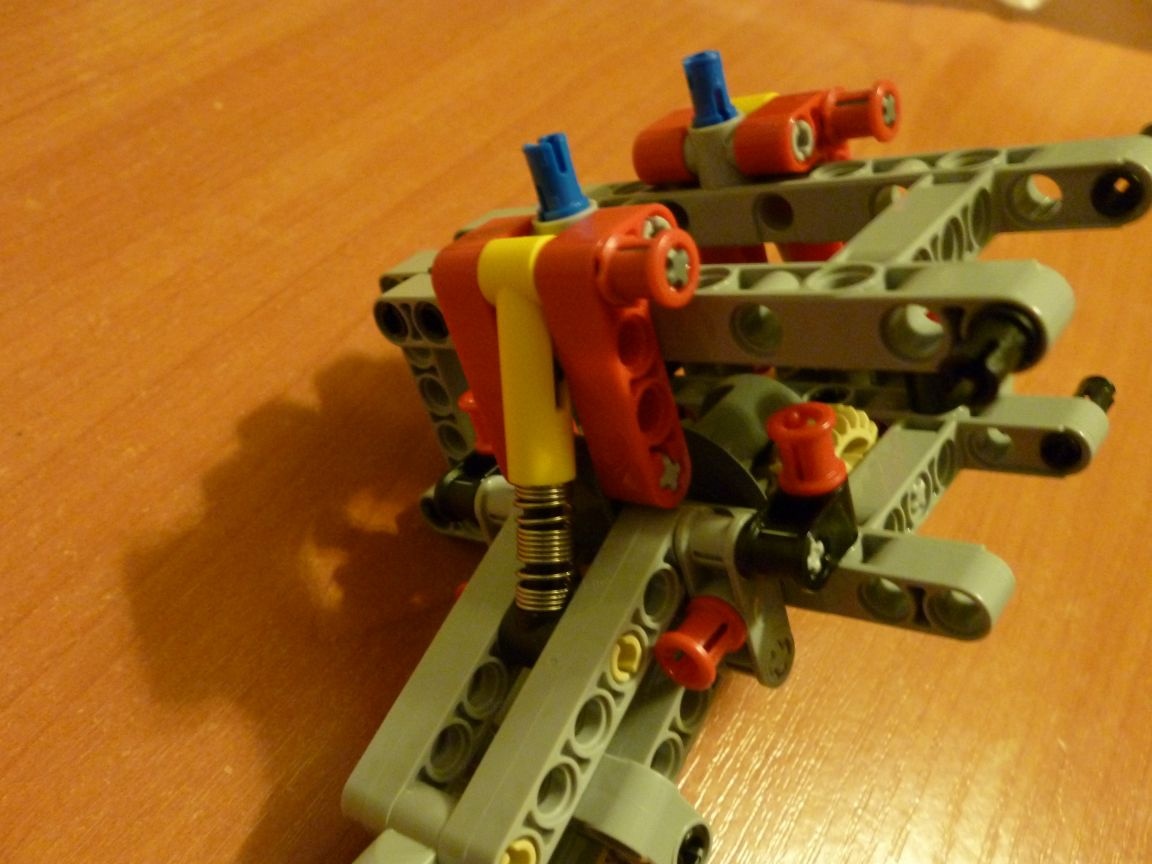
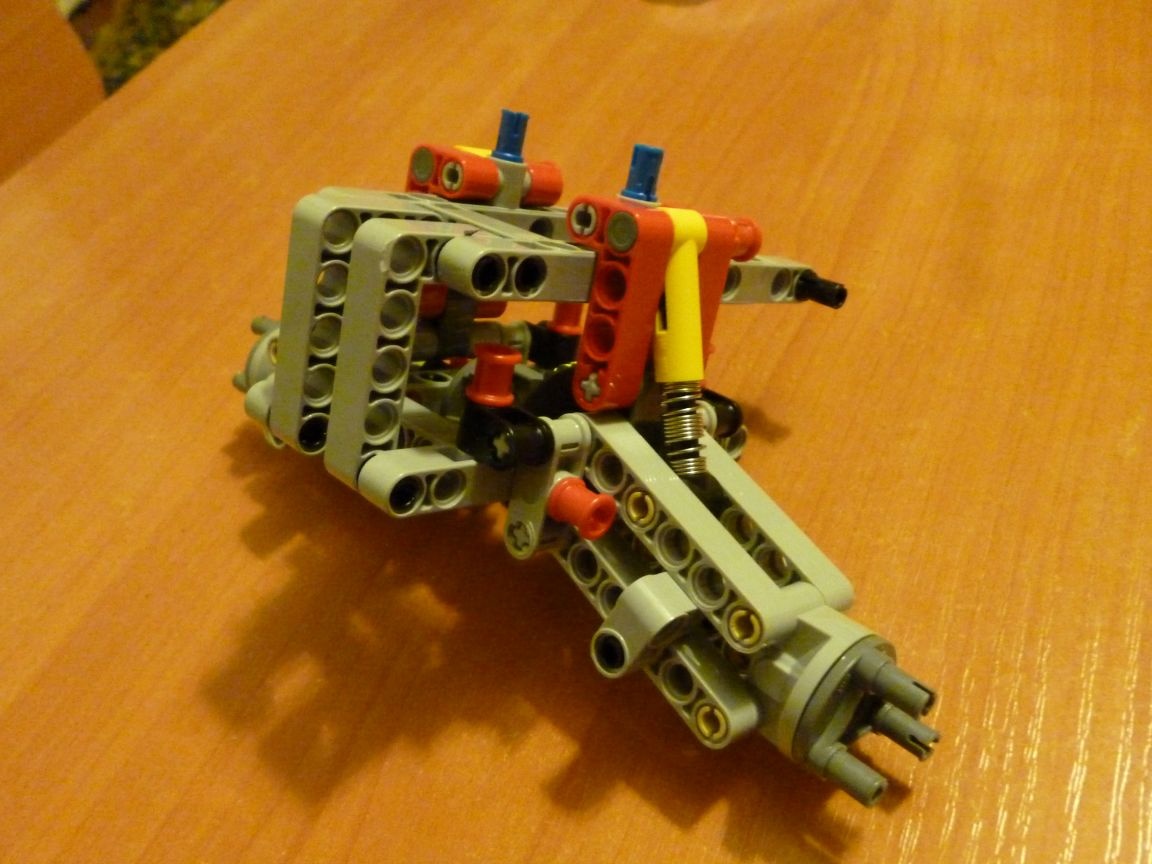
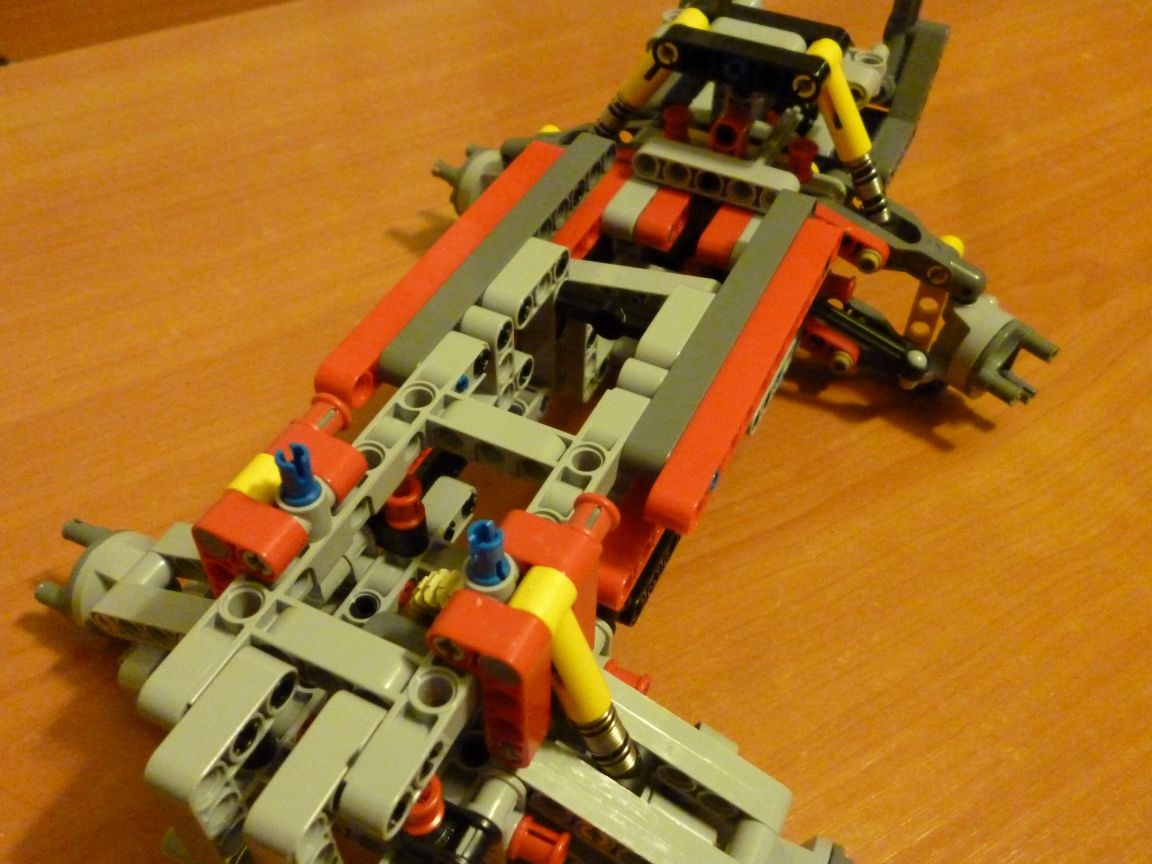
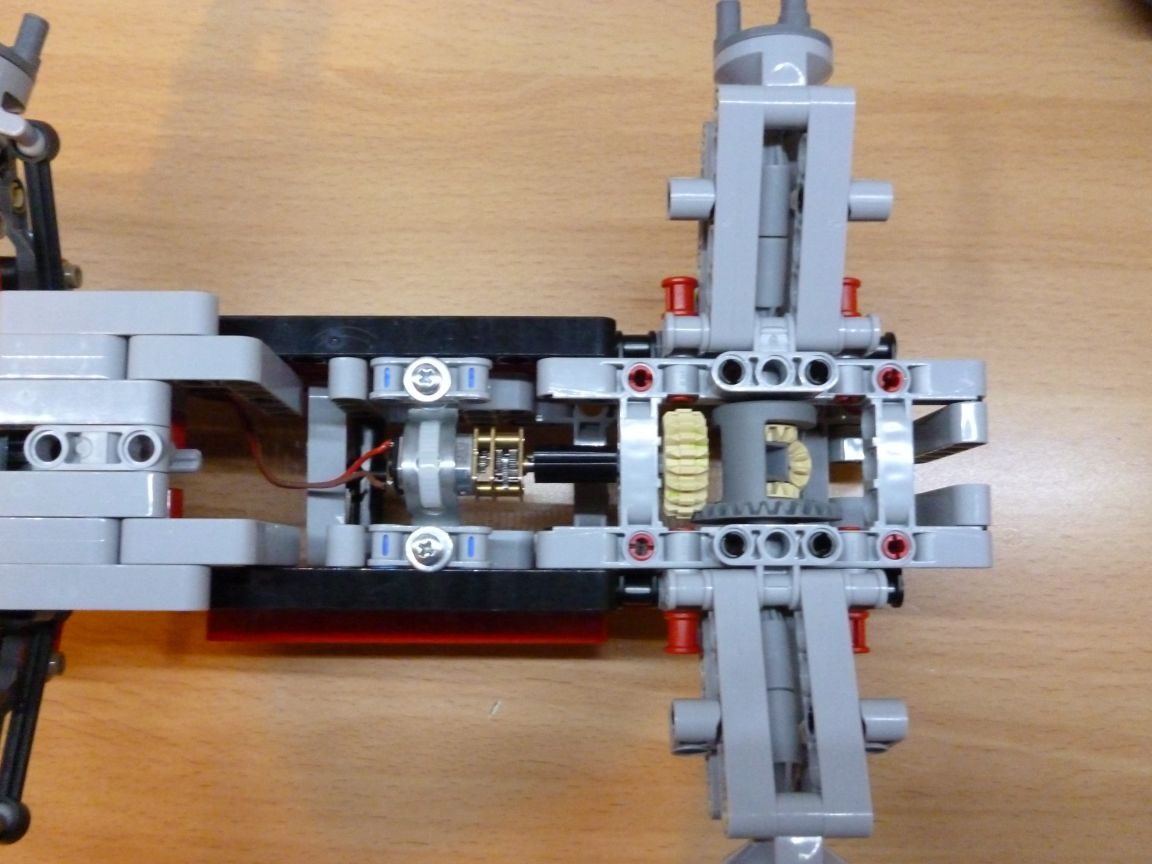
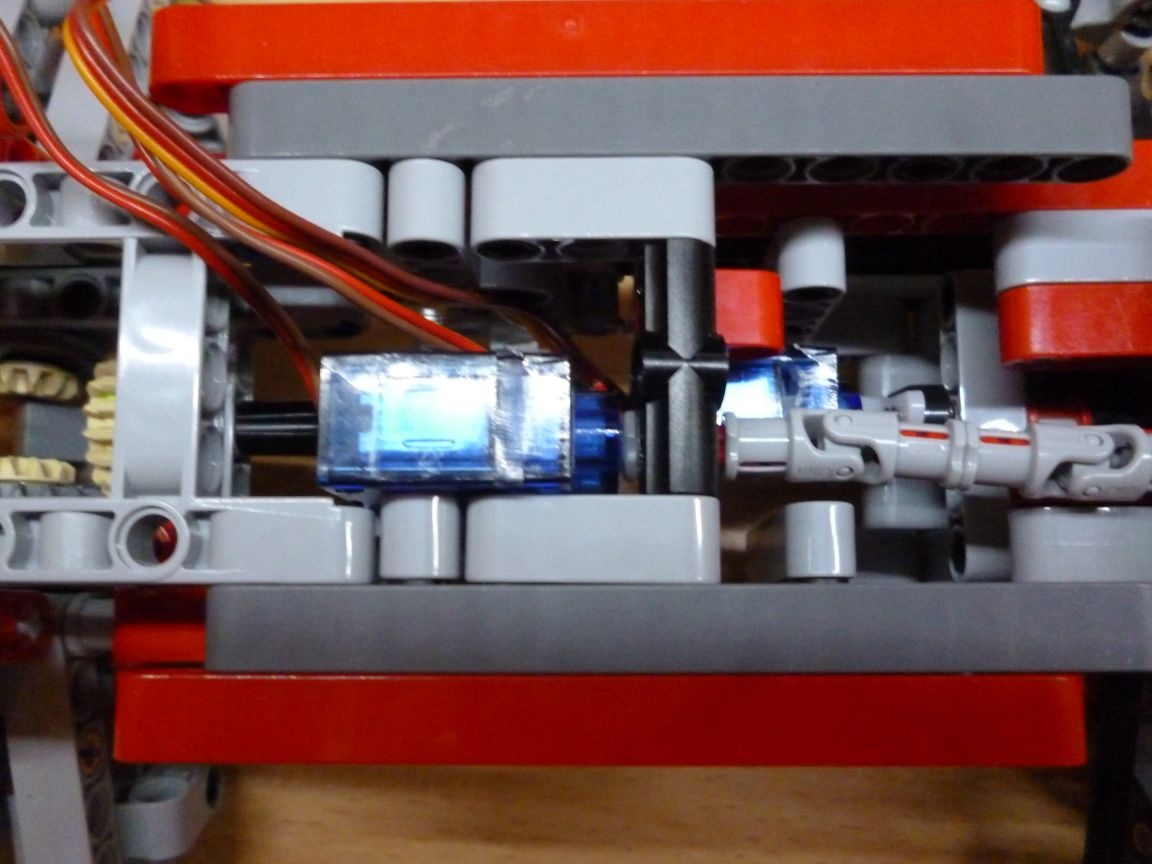
Zamontuj na podwoziu:
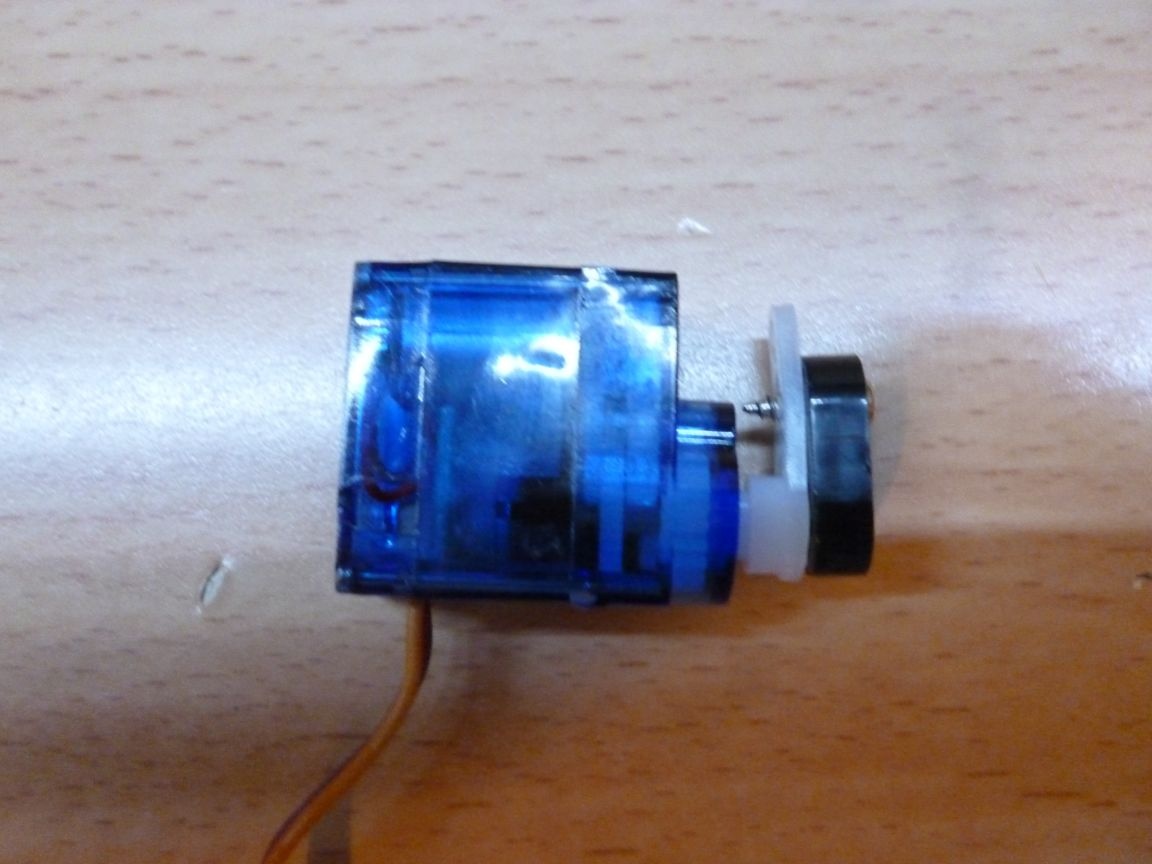
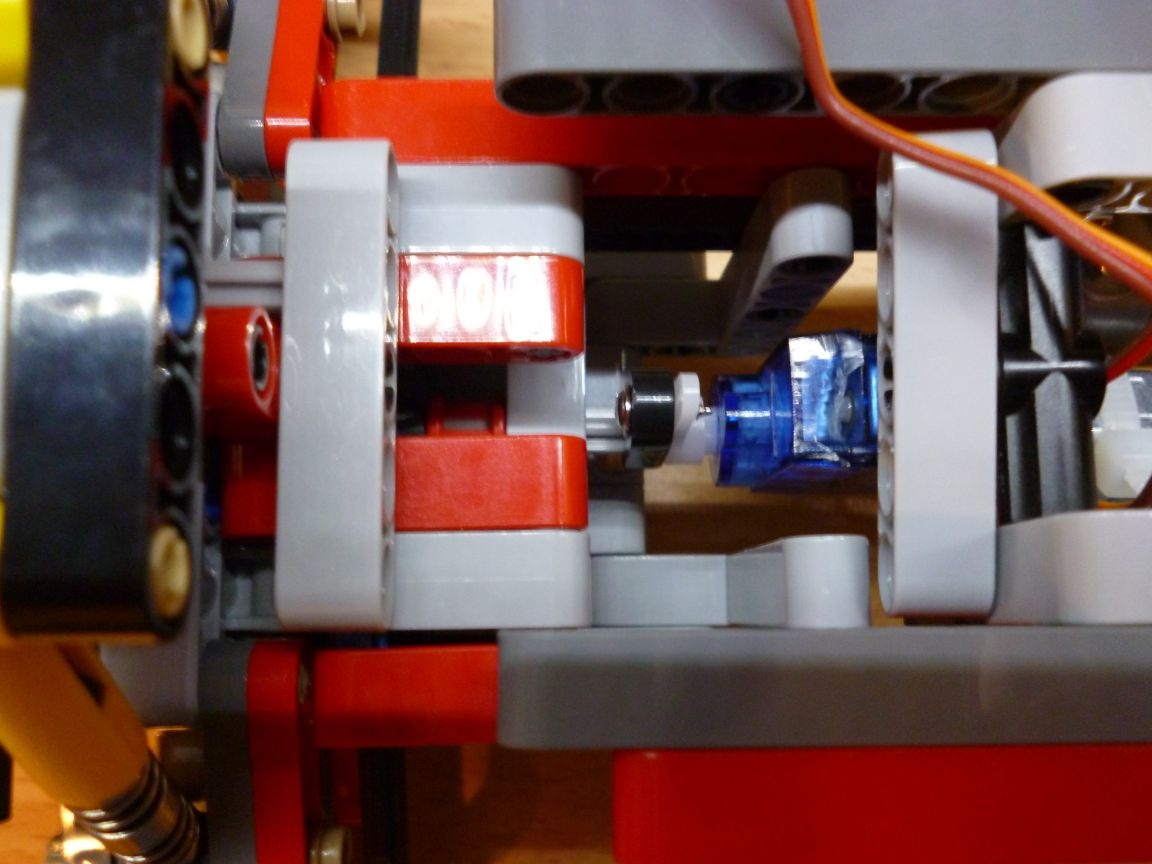
Aby przeprowadzić obrót, wziął serwo SG-90. Konieczne jest staranne wywiercenie, aby nie dotknąć wewnętrznych części, otworu przelotowego o średnicy 3,2 mm lub po prostu wyciąć nożem biurowym. Odetnij również wystające części („skrzydełka” do mocowania). Wkładamy śrubę do wykonanego otworu i mocujemy za pomocą nakrętek. Na wale serwa nakładamy dźwignię z wkręconą częścią z klocków LEGO:
Zainstaluj:
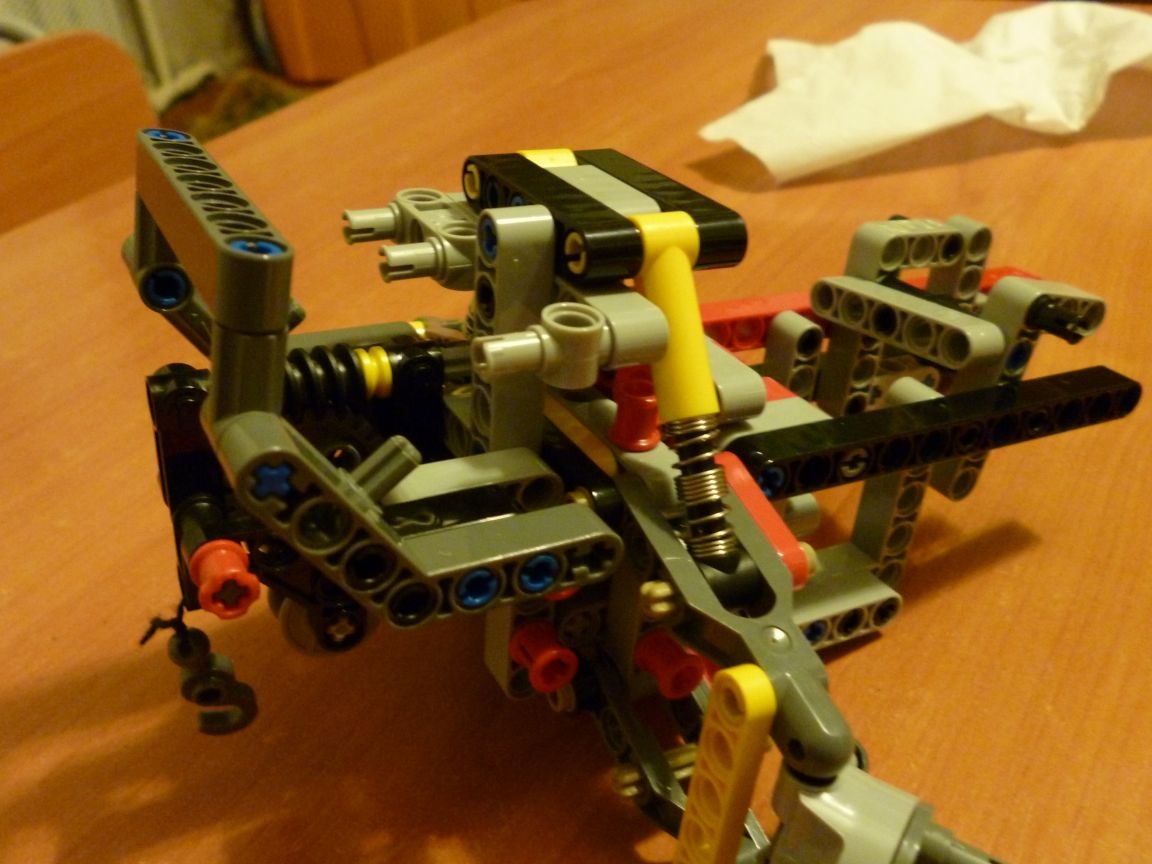
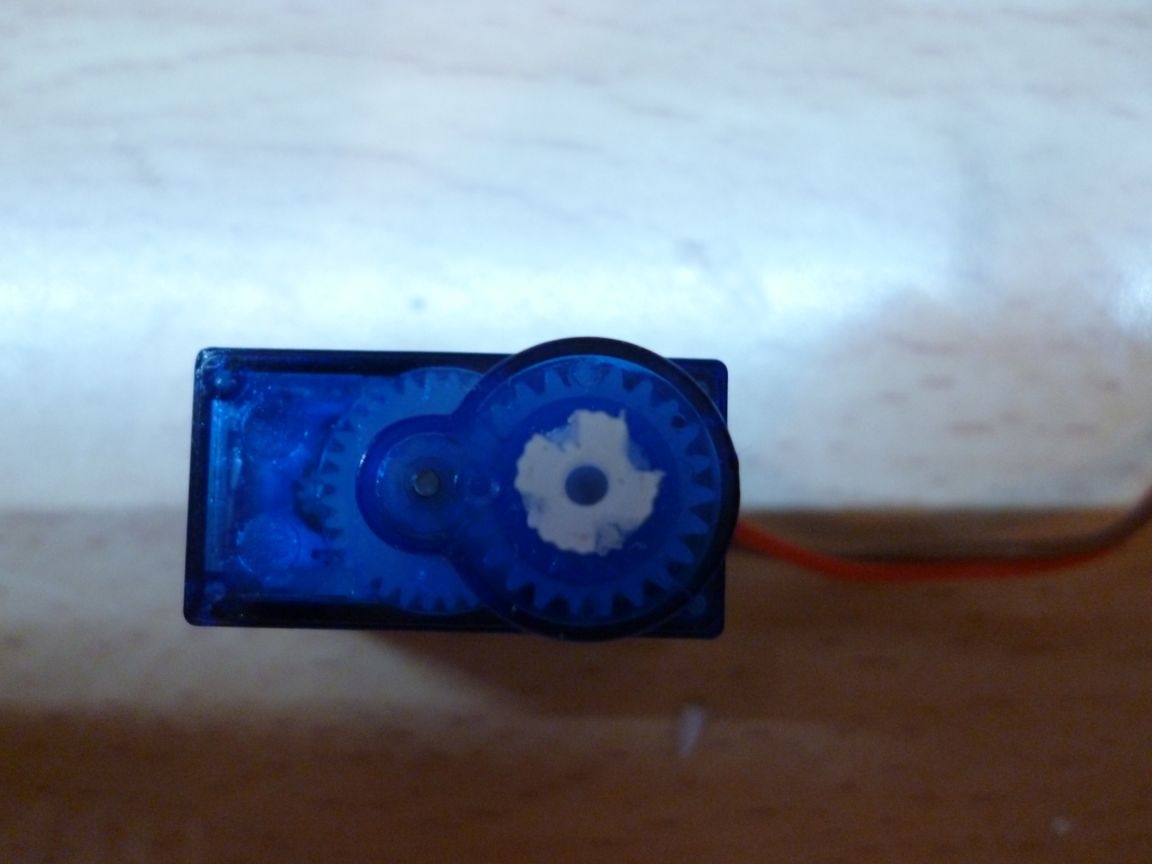
Drugiego serwa użyjemy do wyciągarki. Robimy to samo co za pierwszym razem. A teraz trzeba go zmodernizować, aby mógł się swobodnie obracać. W tym celu demontujemy serwonapęd, wyjmujemy płytę i lutujemy przewody bezpośrednio do silnika. Wyciągamy główny bieg i odcinamy jego ograniczniki ruchu.I na koniec wykonujemy szczelinę nożem biurowym na głównym biegu, jak na zdjęciu:
Łączymy się z naszą wyciągarką i zakładamy podwozie:

Krok 4 Zarządzanie kontrolerem
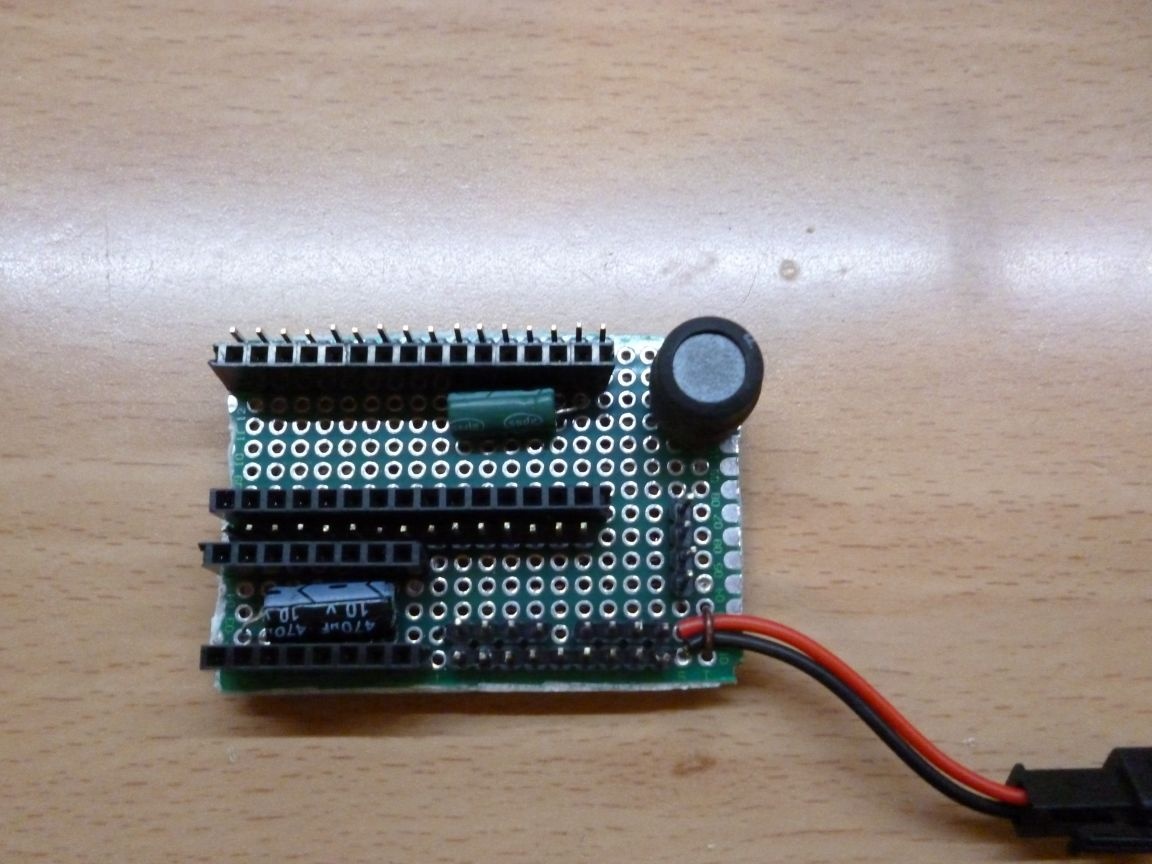
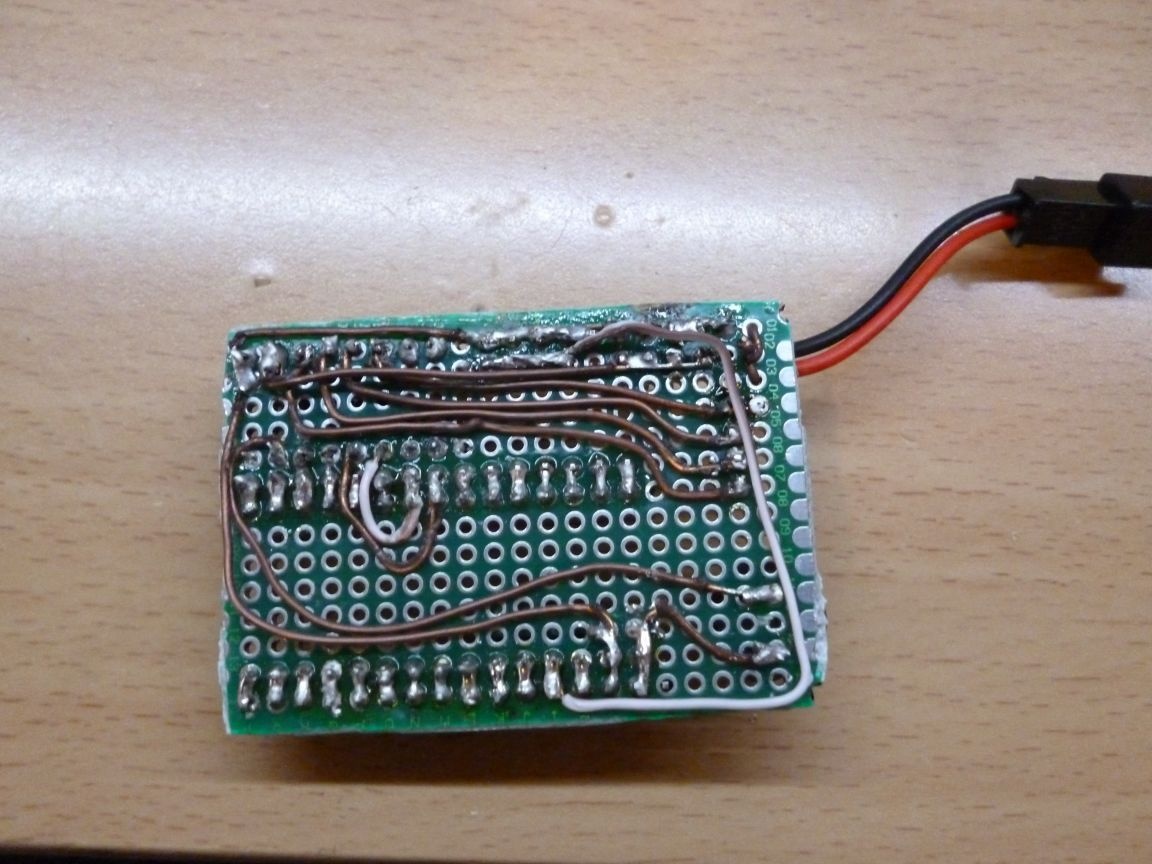
Do kontroli użyjemy Arduino i odbiornika IR. Bierzemy lutownicę i montujemy na płytce drukowanej:
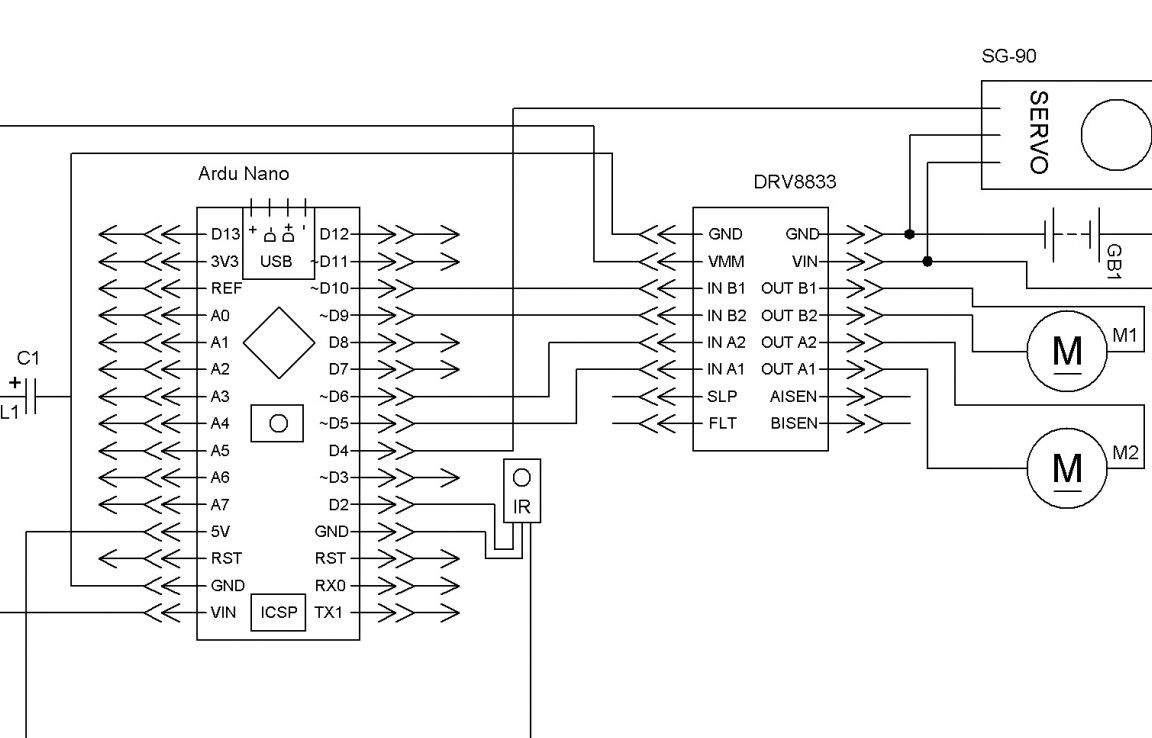
Wyjaśniam: każdy kondensator małej mocy, cewka indukcyjna, którą również znajdziesz, musisz ustabilizować napięcie mikrokontrolera. Rezystory są wybrane dla zastosowanych diod LED. Odbiornik podczerwieni lub TSOP można pobrać ze starej zabawki lub kupić w sklepie radiowym. Jeśli występują silne zakłócenia, dodaj kondensator do obwodu zasilania odbiornika IR.
W rezultacie otrzymujemy:
Instalujemy Arduino Nano i DRV 8833 w ich miejscach:
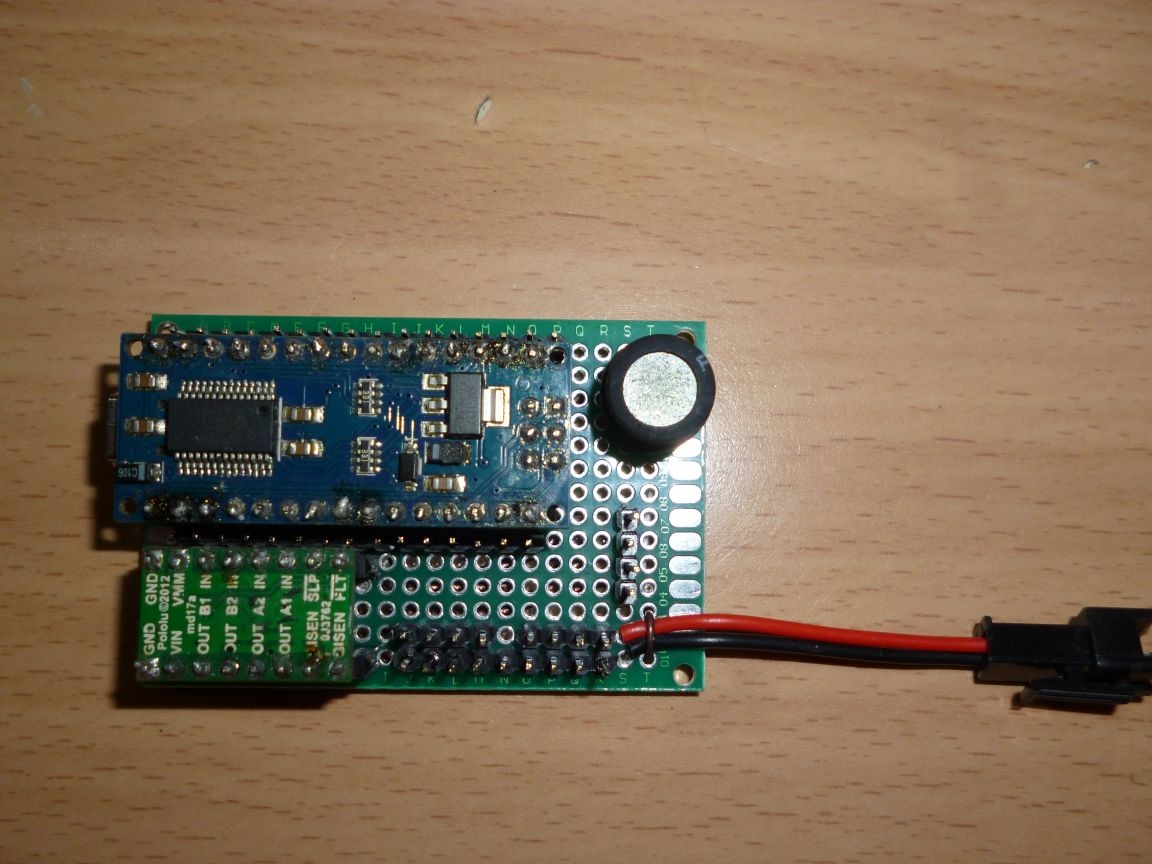
I umieść płytę na podwoziu:
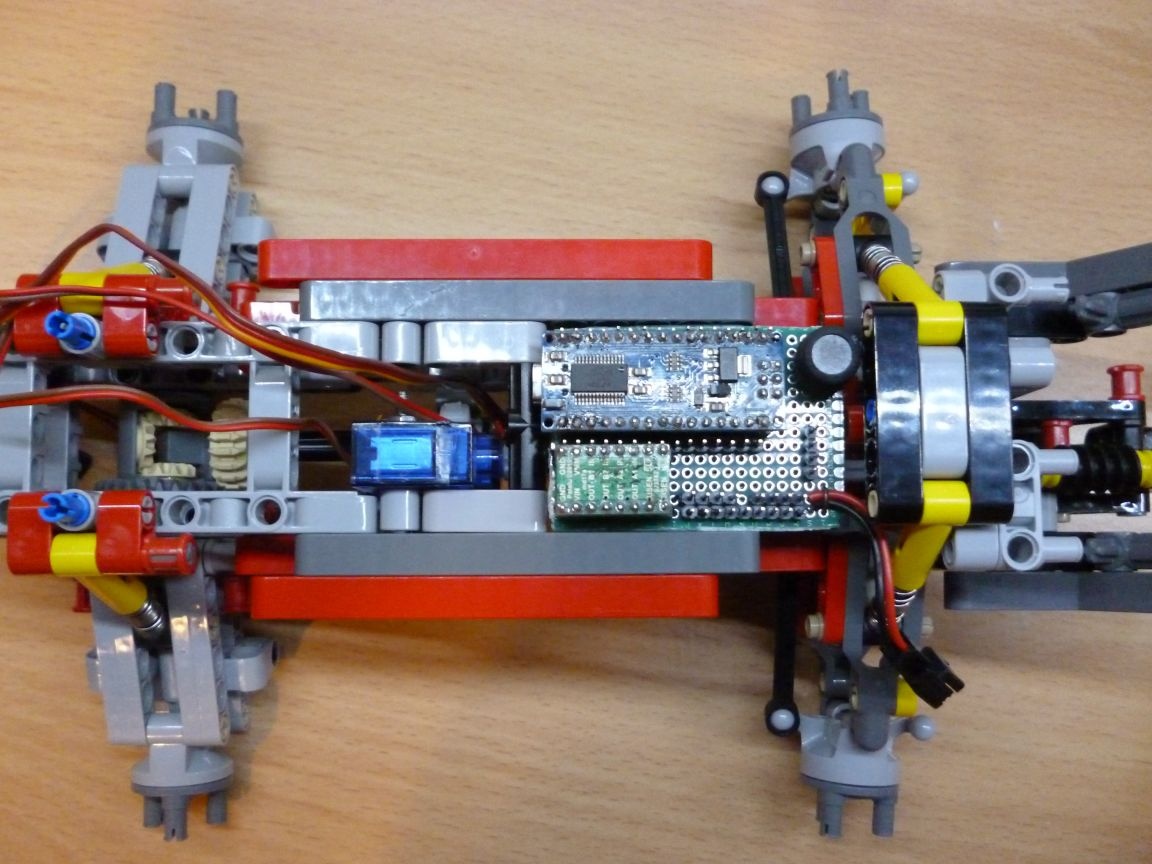
Zasilanie - 6 akumulatorów Ni-Mn 1,2v 1000mA. Konieczne jest lutowanie ich szeregowo i nawijanie za pomocą taśmy elektrycznej. Przyklej taśmę dwustronną z tyłu obudowy.
Łączymy całą naszą strukturę:
Krok 5 Kabina
Kabina jest osobiście moją improwizacją, nie ma gotowych instrukcji, więc musisz zebrać ze zdjęć.



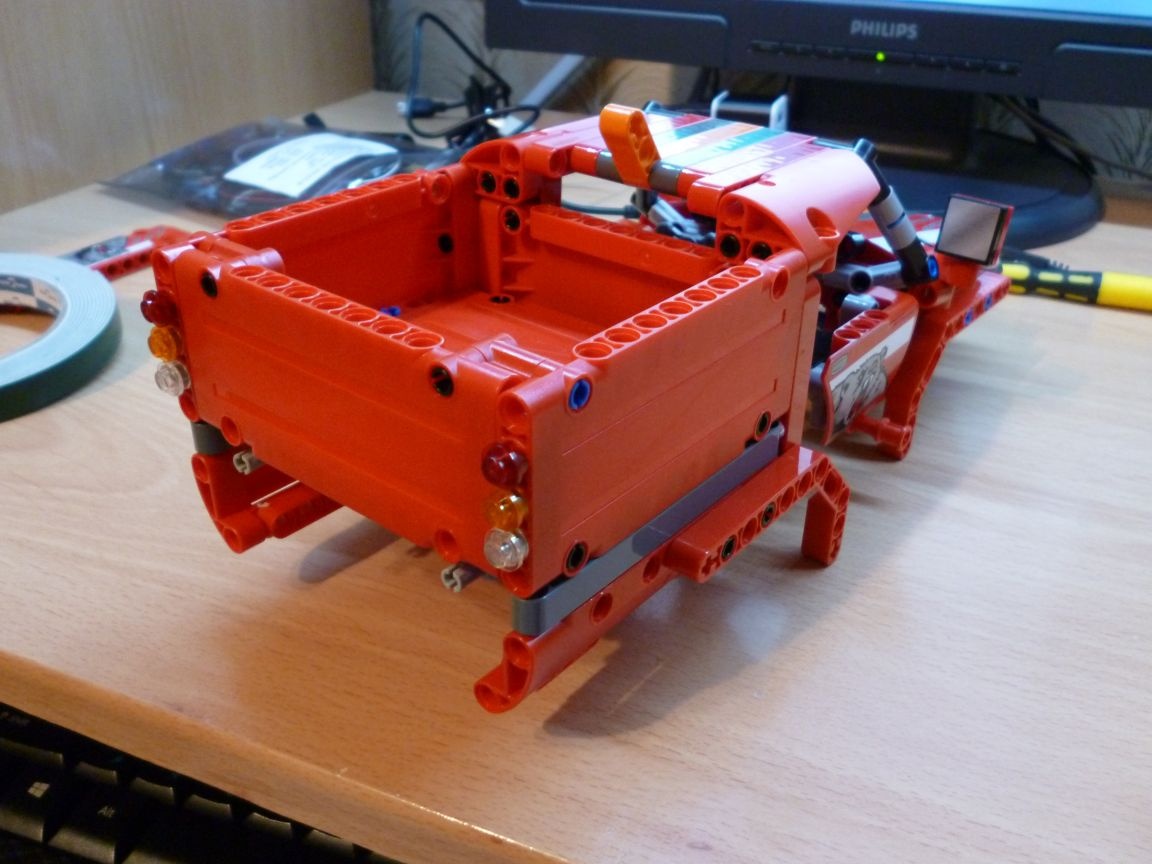
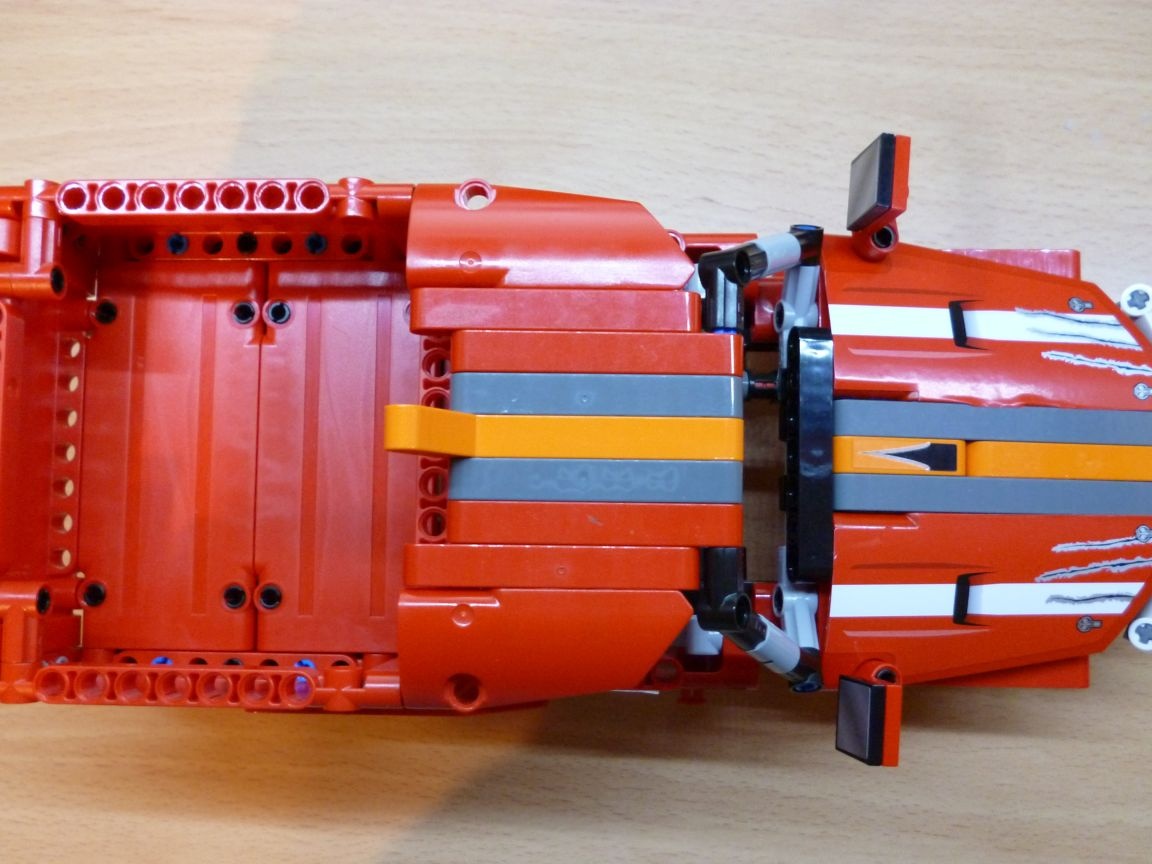
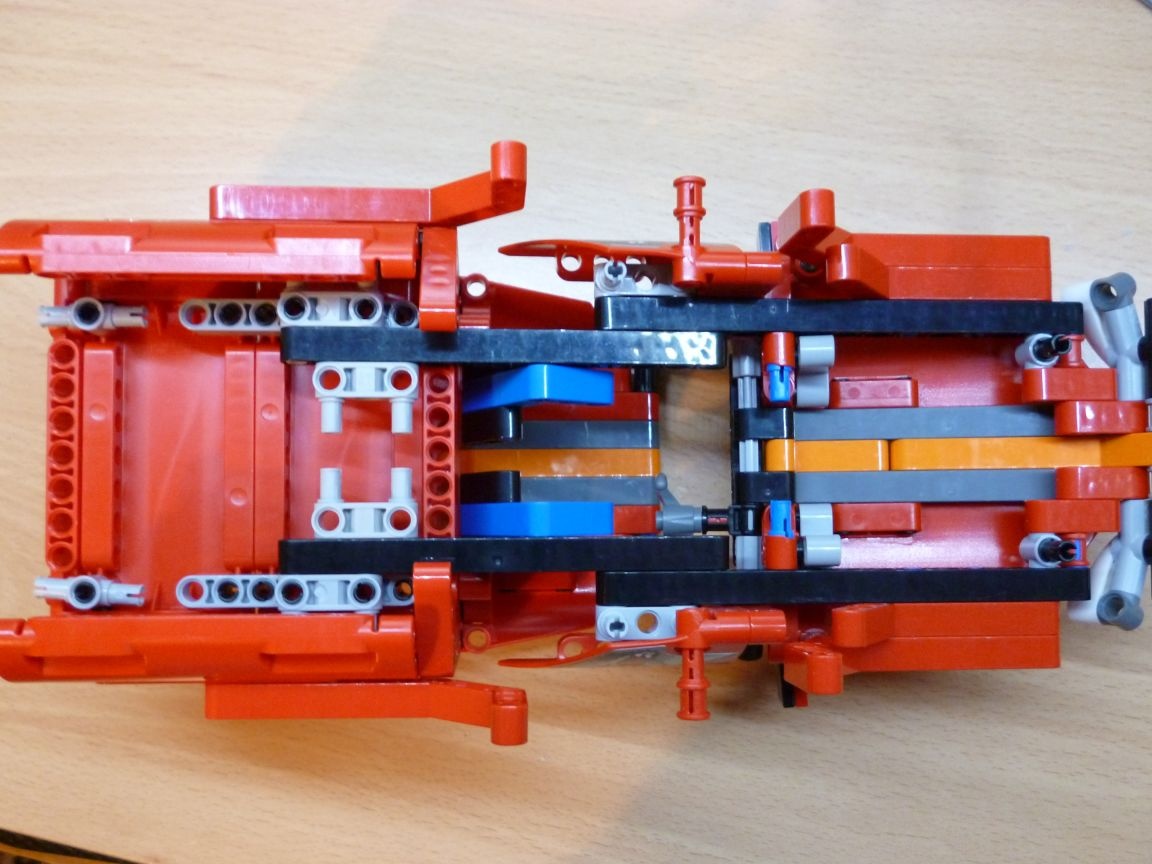
Możesz zmontować własną wersję, wystarczy ją zamontować pod podwoziem. Najważniejsze jest tutaj dopasowanie montażu do podwozia. Jest ich cztery i są wyraźnie widoczne na zdjęciu z dołu kabiny.
Krok 6 oprogramowanie układowe.
Dzisiaj jednak, jak zawsze, programuję w Arduino IDE. Najpierw musisz uzupełnić moje oprogramowanie wewnętrzne i poprzez terminal spojrzeć na kody zdalnego sterowania, których będziesz używać. Możesz wziąć dowolnego pilota na podczerwień, na przykład z telewizora, odtwarzacza DVD lub zmontować własny (mam domowej roboty pilot z joysticka Sega). Naciskając przycisk, w terminalu zobaczymy kod wciśniętego przycisku, napisz go na kartce papieru. Robimy to za pomocą wszystkich przycisków, na których chcemy zaprogramować akcje. Następnie edytuj szkic. Zapisujemy w nim nasze kody w celu wykonania niezbędnych działań i ponownie flashujemy. To oprogramowanie jest skonfigurowane na moim pilocie joysticka Sega. Podczas zabawy z maszyną zauważyłem kilka niuansów lub niedogodności. Trudno jest uzyskać niezawodny odbiór poleceń IR podczas ruchu. I dzieje się tak: naciśnij strzałkę do przodu, maszyna otrzymała polecenie, aby iść, i rzuciła się do przodu, zwolniła strzałkę, ale nie otrzymała polecenia zatrzymania i kontynuuje jazdę, dopóki się nie zawiesi lub utknie, jest pełna awarii. Częściowo ten problem można rozwiązać, zwiększając liczbę ponownych prób wysłania polecenia, jednak jest to możliwe tylko przy samodzielnym użyciu pilota. Ale wybiorę bardziej kardynalne rozwiązanie - przejdę na nadajnik - odbiornik 433 MHz. Napiszę o tym w następnym artykule.
Krok 7 załóż koła.
Musimy więc po prostu postawić kabinę na podwoziu, założyć koła i sprawdzić działanie naszego SUV-a.

