W następny piątek wieczorem autor chciał zebrać coś interesującego. Pamiętając o tym, widział projekty rysowania robotów i mając serwomechanizm o stałej rotacji, postanowiono złożyć takiego robota. Serwo z ciągłym obrotem może być wykonane ze zwykłego.
Materiały:
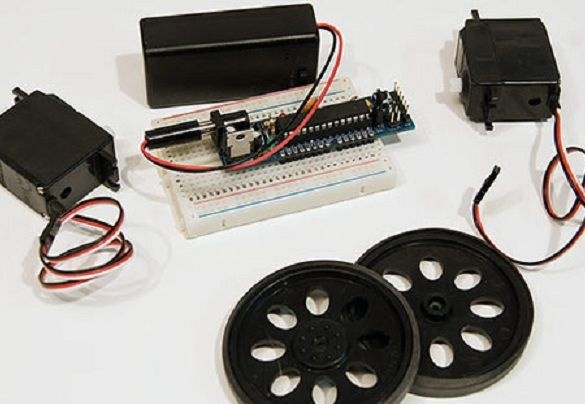
- DC Boarduino (jest to klon Arduino)
- Serwo ciągłego obrotu 2 sztuki
- Koła serwo 2 szt
- deska do krojenia chleba
- Złącze akumulatora 9 V z wtyczką i przełącznikiem 2,1 mm
- przewody łączące
W tym projekcie nie jest konieczne używanie Boarduino, wystarczy dowolna płyta Arduino. Autor wybrał tę tablicę ze względu na jej rozmiar. Będziesz także potrzebował pewnej liczby znaczników, możesz kupić zestaw różnych kolorów dla tego robota.
Ponadto potrzebujesz baterii 9 V i podstawy dla korpusu robota rysującego.
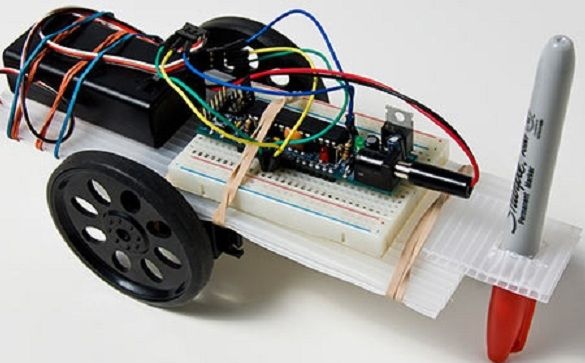
W montażu robota nie ma nic skomplikowanego. Przede wszystkim autor mocuje koła za pomocą dwóch serwomechanizmów taśmą klejącą i zmierzył odległość między kołami. Konieczne jest, aby szerokość podstawy była nieco mniejsza niż odległość między kołami. Autor używa tektury falistej, ponieważ jest dość lekki i trwały, a praca z nim nie jest trudna. Jego użycie oczywiście nie jest konieczne, możesz nawet użyć tektury lub plastiku z pudełek na dyski.
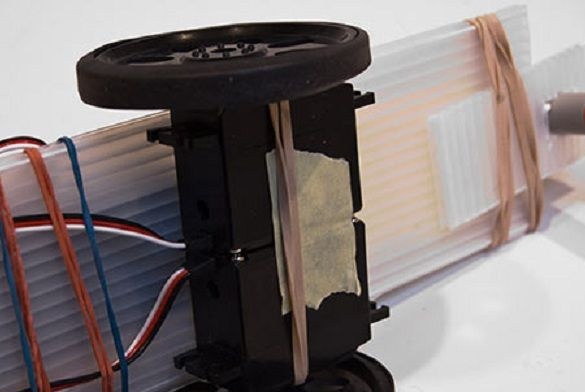
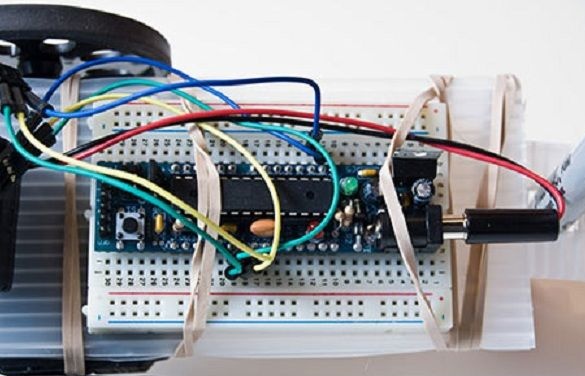
Serwonapędy zostały podłączone do podstawy za pomocą gumek. Podczas umieszczania baterii i płyty chlebowej pojawiły się trudności, ponieważ konieczne było utrzymanie równowagi. Autor chciał zrobić więcej miejsca po stronie, z którą został umieszczony znacznik, ale nie chciał uzyskać przewagi po przeciwnej stronie. Za pomocą gumek dość łatwo jest ustawić lokalizację komponentów, określając optymalny.
W całym projekcie druty ze stykami BLS są używane do łączenia płyty chlebowej, a także serwonapędy.
Kiedy autor zakończył całą pracę nad montażem robota, od razu chciał sprawdzić jego wydajność. Wyszukiwanie kodu zajęło trochę czasu. Natknąwszy się na artykuł na temat sterowania serwomechanizmem ciągłej rotacji Parallax za pomocą Arduino, zdał sobie sprawę, że jest na dobrej drodze. Kod został maksymalnie uproszczony, w tej chwili Drawbot może tylko krążyć w kółko.Oczywiście jest to prymitywne, ale jest także świetnym początkiem i podstawą do rozwoju i modernizacji. Kod można pobrać pod tym artykułem.
Teraz autor otrzymał robota, który porusza się po okręgu. Kontynuując pracę, autor wziął resztki falistego plastiku i wykonał w nim dziurę za pomocą noża. Otwór został wycięty o średnicy nieco mniejszej niż wymagana, dzięki zmniejszonemu otworowi znacznik został w nim idealnie zamocowany. Jeśli użyjesz tektury, ten efekt nie będzie, a marker nie będzie dobrze trzymał się lub wypadł.

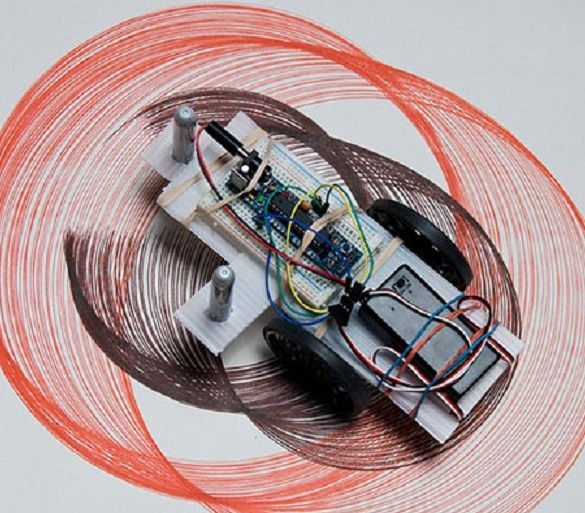
Po zainstalowaniu znacznika czas przetestować robota. Ustawiając go na środku arkusza 24x18 i włączając go, autor w końcu zobaczył Drawbota w akcji. Zaczął kręcić kółkami do rysowania. Można powiedzieć, że autorowi udało się stworzyć robota, który tworzy rodzaj dzieła sztuki.
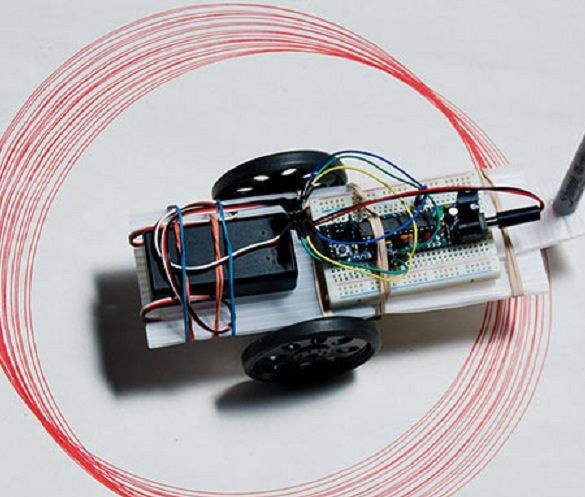
Obraz wyszedł trochę niezręcznie z powodu prześcieradła leżącego na podłodze i nie był całkiem równy, i najprawdopodobniej serwomechanizmy nie obracały się synchronicznie. Okazało się, że jedno koło może być niższe, drugie wyższe, a następne jeszcze trochę wyżej lub niżej. Prawdopodobnie w idealnej lokalizacji wszystkie koła byłyby wyrównane w jednej linii. Wyglądałby ładniej.
Autor pomyślał, że drugi marker może rozjaśnić sytuację i robot zrobi więcej interesujących zdjęć. Wynik był dobry, koła zaczęły się przecinać. Bardziej interesujące będzie zobaczenie, jak Drawbot zachowuje się na dużej kartce papieru.
Zwalniając robota na papierową powierzchnię, autor może uzyskać okrąg lub kilka kółek. Ale mając gotowego robota, możesz już myśleć o ulepszeniu go przez zmianę kodu.