

Pultoidy nazywane są takimi robotami, którymi można sterować zdalnie za pomocą pilota. Na przykład do tych celów można użyć pilota telewizora. Głównym zadaniem, które autor postawił sobie przy produkcji takiego robota, jest prostota jego montażu. Rozważany robot nie wymaga produkcji płytki drukowanej, instalacja jest bardzo prosta i po prostu dzieje się na tekturze.

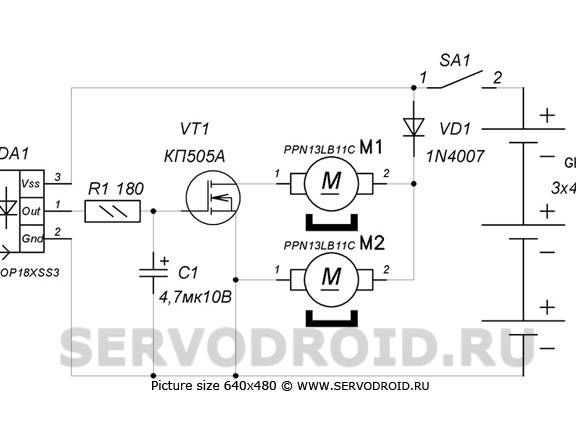
Elektroniczny Obwód robota składa się tylko z czterech elementów: diody, tranzystora, fotodetektora i kondensatora. Do produkcji części mechanicznej potrzebne będzie również minimum materiałów, na przykład płyta CD-ROM jest używana do wykonania obudowy.
Robot wykonany w ten sposób zrozumie tylko jeden zespół. Warto nacisnąć dowolny przycisk na panelu sterowania, a robot zacznie się obracać. Jeśli nadal przytrzymasz przycisk, kąt obrotu stanie się większy, w wyniku czego robot będzie mógł obracać się o 360 stopni.
Urządzenie robota
Dysk kompaktowy służy jako podstawa do produkcji robota. Jeśli chodzi o elementy mocy, są one mocowane za pomocą śrub M2. Płytka elektroniczna, także komora baterii, jest przymocowana za pomocą taśmy.
Jeśli chodzi o silniki, są one ustawione pod kątem, a ich wały opierają się na drodze. Zatem nie ma potrzeby oddzielnego wytwarzania kół. Śruby są mocowane za pomocą ramek wykonanych z linii szkolnej.
Trzy baterie „małego palca” zasilają robota, są zainstalowane w specjalnej skrzynce. Łącznie zasilacz wytwarza 4,5 V.
I wreszcie fotodetektor, tutaj jest tylko jeden, jest to typ TSOP. Odbiera modulowane sygnały z dowolnego pilota, dzięki czemu można sterować robotem.
Materiały i narzędzia do produkcji:
- nylonowe krawaty;
- fotodetektor typu TSOP1836;
- jeden tranzystor polowy (KP505A);
- dysk kompaktowy;
- fular dla baterii w trzech sekcjach;
- trzy „małe” baterie;
- plastikowa linijka;
- śruby do zamocowania ramy;
- przewody i wyłącznik (krzyżowy).
Proces produkcyjny:
Pierwszy krok Konstrukcja PCB
Aby wykonać płytkę drukowaną, najpierw musisz wydrukować rysunek na papierze. Powinieneś dostać dwa obrazy, na jednym rysunku instalacyjnym i na drugiej stronie planszy. W sumie plansza będzie się składać z trzech elementów, pośrodku po obu stronach będzie tektura falista sklejona papierem biurowym. Aby przykleić deskę, zaleca się stosowanie suchego kleju w sztyfcie.
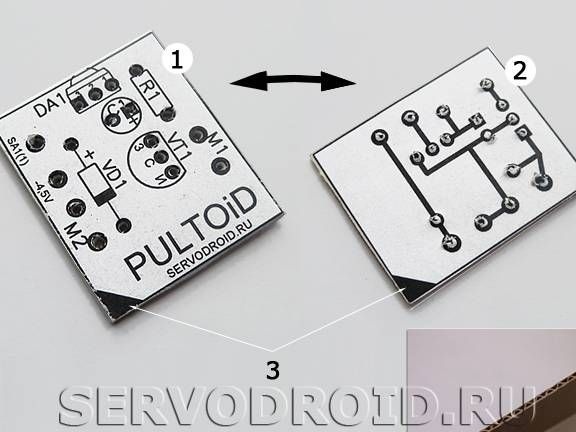
Krok drugi Instalacja elementów radiowych
Podczas instalowania elementów elektronicznych ważne jest, aby nie zapomnieć ani odciąć wystających krawędzi styków. Następnie zostaną wygięte, a tym samym powstanie obwód elektryczny. Wszystkie elementy są połączone przez lutowanie zgodnie z określonym schematem.
Rezystor R1 w obwodzie należy wymienić na dowolną zworkę. Jeśli chodzi o fotodetektor, prawidłowa kolejność jego podłączenia jest również pokazana na zdjęciu.

Krok trzeci Instalacja ramy mocy
Aby zainstalować silniki, musisz utworzyć ramę mocy. Jako materiał zostanie tutaj użyty plastikowy władca szkolny. Musi być pocięty na dwie części i wygięty, jak pokazano na zdjęciu. Aby linijka zaczęła się zginać, musisz doprowadzić gorącą lutownicę do miejsca ugięcia w odległości około 2 mm. Również do tych celów można użyć suszarki budowlanej. Linijkę należy płynnie wygiąć pod kątem około 30 stopni.
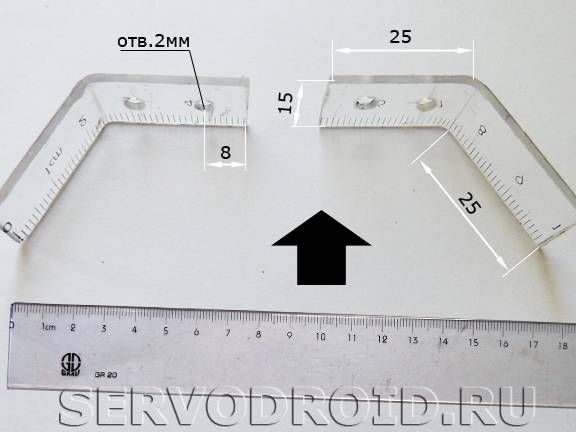

Po utworzeniu ramki możesz kontynuować instalację. Aby to zrobić, weź śruby CD i 2 mm z nakrętkami. Ponadto w odpowiednich miejscach wierci się otwory o średnicy co najmniej dwóch milimetrów, a ramę mocuje się za pomocą śrub. Aby rama nie ślizgała się, przed zainstalowaniem należy przykleić dwustronną taśmę do dysku.
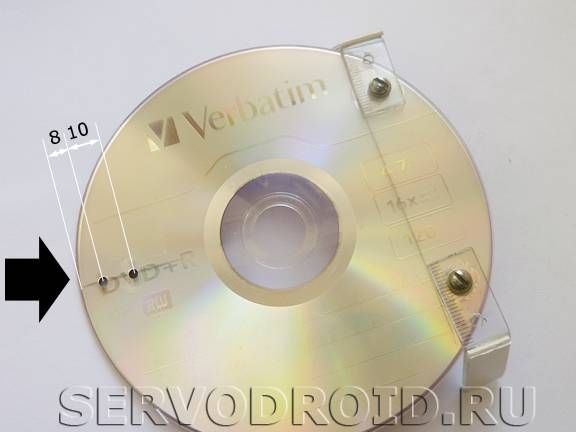
Krok czwarty Instalowanie przedniego wspornika
Z przodu dysku musisz wywiercić dwa otwory i przygotować jastrych nylonowy. Rozmiar jastrychu powinien wynosić 3 x 150 mm. Musi być włożony jak wskazano na zdjęciu. W rezultacie powstałe podparcie amortyzuje się idealnie podczas pracy robota i ślizga się po drodze.


Krok piąty Instalacja silnika
Aby zapobiec ślizganiu się wałów silnika po drodze, należy na nie nałożyć ochraniacze. Są wykonane z gumy, którą można znaleźć na pastach z długopisami helowymi. Aby zainstalować silniki, najpierw musisz przykleić kawałek dwustronnej taśmy do wspornika, aby zapobiec poślizgowi. Cóż, wtedy silniki są ostatecznie przymocowane nylonowymi opaskami.

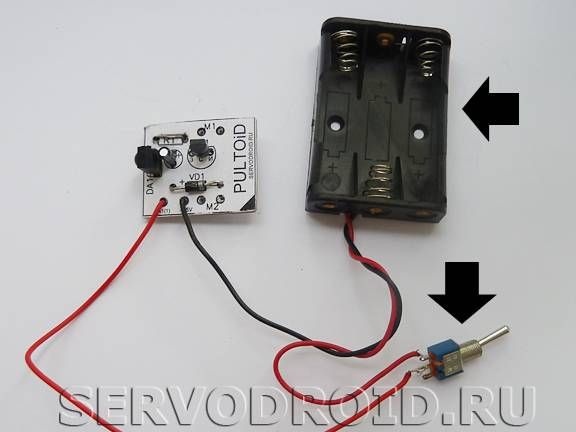
Krok szósty Przełącznik i podłączenie zasilania
Jako źródło zasilania można użyć dowolnej baterii, której prąd nie przekracza 5 woltów. W tym przypadku stosuje się skrzynkę na baterie z trzema palcami, które łącznie wynoszą 4,5 V.
Jeśli chodzi o przełącznik, jest on zamontowany na szczelinie styku dodatniego pochodzącego ze źródła zasilania. Czerwony przewód jest przymocowany do płytki do styku SA1 (1), a czarny przewód do styku -4,5 V.


Również na tym etapie można podłączyć silniki, ich przewody są podłączone do styków M1 i M2.
Siódmy krok. Ostatni etap
Na ostatnim etapie należy naprawić wszystkie elementy elektroniczne. Są one przymocowane do dysku za pomocą taśmy dwustronnej. Jeśli chodzi o przełącznik, należy go również naprawić, w tym celu można użyć gorącego kleju.

To wszystko, teraz robot jest gotowy. Możesz spróbować go włączyć i wydać polecenie włączenia za pomocą dowolnego pilota.