

Takich robot został już utworzony i nazywa się DIY: LightBot. Co więcej, każdy może go zebrać, wszystkie elementy do stworzenia można łatwo znaleźć, a robot będzie montowany po prostu. Ten typ robota będzie podążał za właścicielem w ciemności i podświetlił go we właściwym miejscu, co eliminuje potrzebę trzymania latarki w ręku. Robot będzie monitorowany przez właściciela dzięki czujnikowi podczerwieni przymocowanemu do stopy właściciela.
Materiały i narzędzia do tworzenia robota:
1. Sygnalizator podczerwieni. Takie urządzenie będzie składać się z czterech diod podczerwieni, które można znaleźć w pilocie zdalnego sterowania z telewizora.
2. Dwa koła z zestawu K'nex lub zabawek dla dzieci.
3. Dwa małe silniki (można znaleźć w zabawkach dla dzieci).
4. Dwa tranzystory podczerwieni, takie jak NPN lub fotorezystor. Fototranzystory na podczerwień nie są trudne do kupienia.
5. Trzy baterie AA i jedna 9 woltów.
6. Rura PVC.
7. Klej topliwy.
8. Jednorazowy plastikowy widelec.
Proces produkcyjny robota:
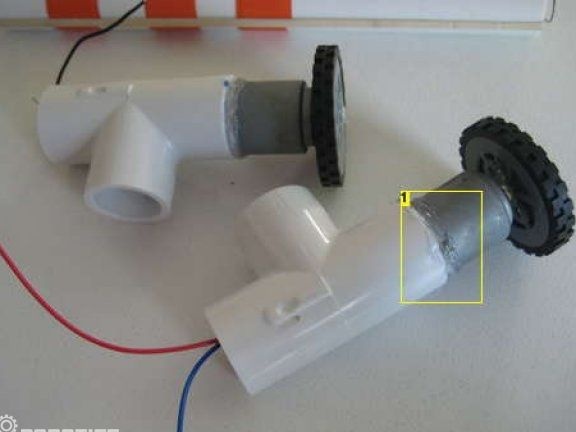
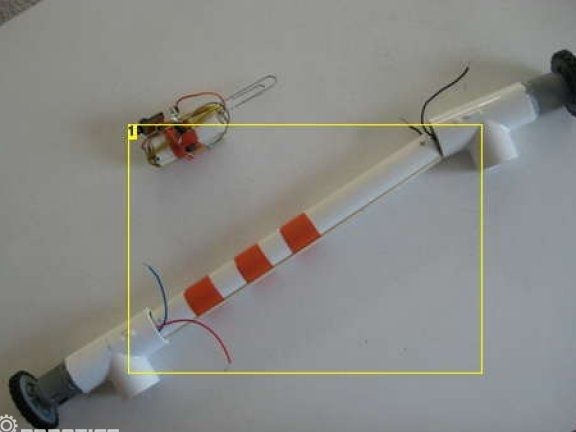
Pierwszy krok Instalacja silnika
Najpierw musisz zainstalować silniki. Do ich montażu stosuje się plastikowe trójniki, które następnie umieszcza się na głównej rurze. Silniki są mocowane za pomocą kleju topliwego. Nie trzeba żałować kleju. Również na tym etapie koła można założyć na oś silników. Aby mocno się trzymały, można je również przymocować za pomocą kleju topliwego.
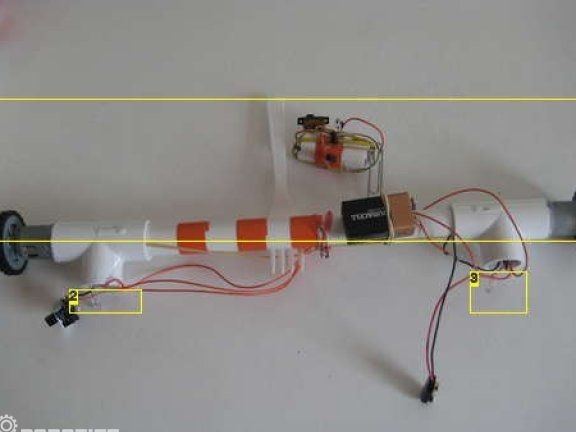
Krok drugi Instalowanie fotorezystorów
Fotorezystory są potrzebne do śledzenia latarni podczerwieni. Będą rodzajem oczu robota. W zależności od kierunku, w którym światło będzie wychodzić, robot przyspieszy jeden z silników, aby skręcić we właściwym kierunku.
Rezystory świetlne są przymocowane do „trójników” w miejscach wskazanych przez cyfry 2 i 3. W tych miejscach można je przymocować za pomocą kleju trójprzylepnego.
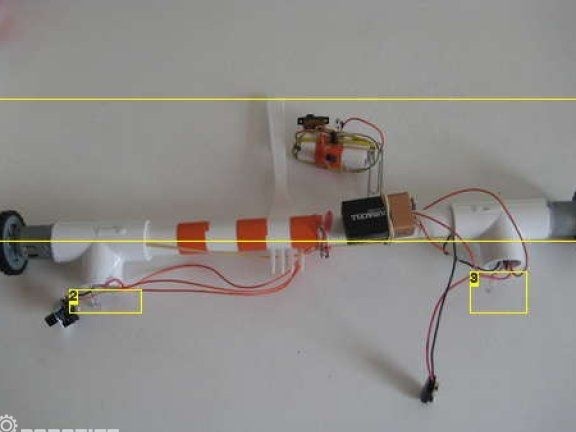
Krok trzeci Instalacja zasilacza
W sumie robot działa na dwóch źródłach zasilania. Są to trzy baterie AA i jedna bateria 9 V. Jeśli chodzi o baterie palcowe, są one zainstalowane wewnątrz tuby.Cóż, bateria typu „Krona” jest przymocowana do słuchawki z zewnątrz.
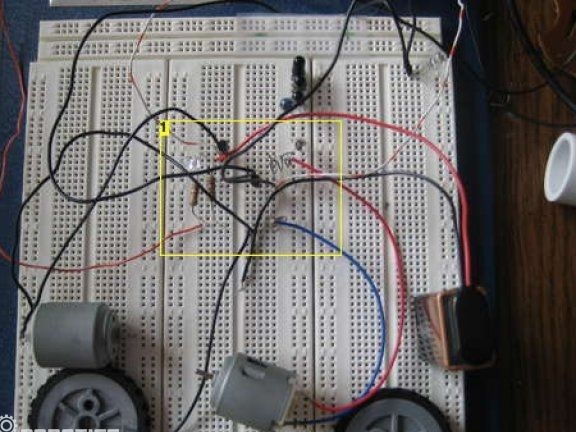
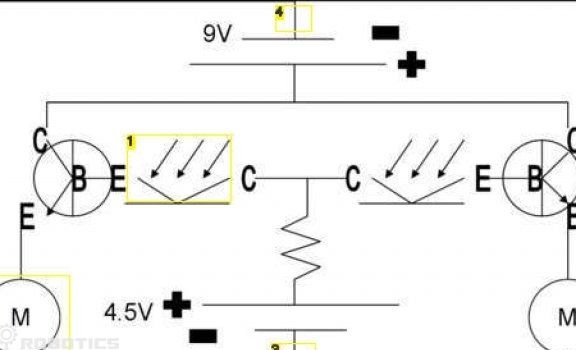
Krok czwarty Obwód robota
Schemat jest zaprojektowany w taki sposób, że jeśli robot widzi promieniowanie z jednej strony, wówczas przyspiesza silnik z drugiej strony, więc robot się odwraca. Pożądaną prędkość obrotową silnika osiąga się poprzez eksperymentalną wymianę rezystorów.
Kolejny obwód można uzupełnić przełącznikiem. Musi być zainstalowany w taki sposób, aby zakłócał zasilanie robota.
Na schemacie liczba 1 oznacza fototranzystor, 2 - sterownik silnika, 3 - miejsce na zainstalowanie przełącznika, 4 - tutaj możesz również umieścić przełącznik.
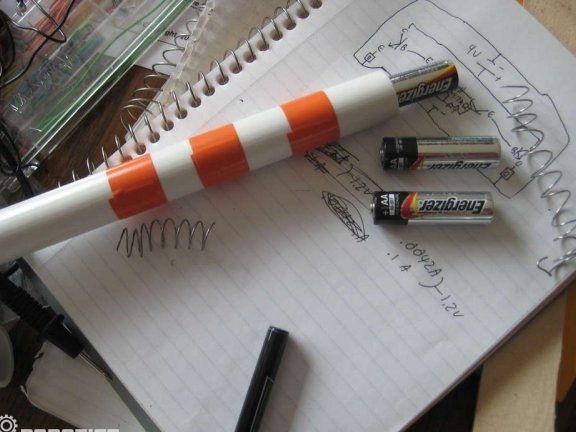
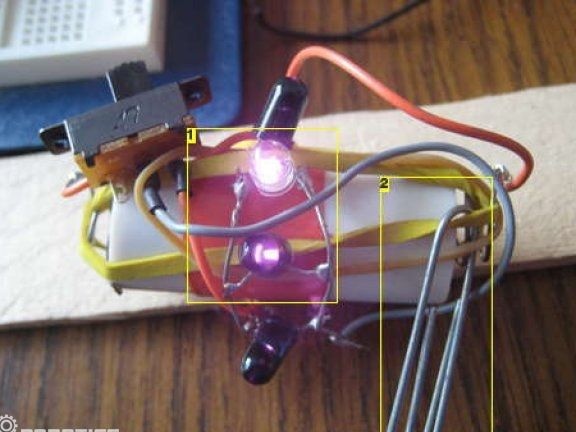
Krok piąty Utwórz nadajnik IR
Aby utworzyć latarnię na podczerwień, bierze się krótką rurkę z polichlorku winylu, w której jest zainstalowana jedna bateria AA. Styki są utrzymywane dzięki elastycznej opasce, a zasilanie czterech diod podczerwieni jest sterowane przełącznikiem. Nie można zobaczyć takiego światła gołym okiem, aby sprawdzić działanie diod, należy spojrzeć na nie przez aparat cyfrowy. Latarnia jest zapinana na nogawce zwykłym spinaczem do papieru.
Krok szósty Ostatni etap montażu robota
Teraz wszystko musi być połączone zgodnie ze schematem. Część mechaniczna również musi zostać zmontowana, największą uwagę należy zwrócić na fotorezystory, muszą one wystawać, ponieważ w przeciwnym razie nie będą w stanie odebrać sygnału latarni. Teraz, włączając robota, musisz obejść go i zobaczyć, co zrobi.
Oczywiście robot może nie pójść za właścicielem po raz pierwszy, ale nie należy rozpaczać, ponieważ obwód można zmodyfikować, a robot odpowiednio skonfigurować. Według autora, w przyszłości oprogramowanie może zostać zainstalowane na robocie, dzięki czemu rozpozna obiekty i ludzi. Możesz także zainstalować wiele różnych czujników i uczynić tego robota urządzeniem zaawansowanym technologicznie.