

Vibroboty są takie robotyktóre poruszają się z powodu wibracji. Pomimo tego, że ich konstrukcja jest dość prosta, robią wrażenie nie mniej niż ich bardziej wyrafinowani technicznie bracia. Taki robot użyje szczeciny jako napędu, to rodzaj nóg.
Robot opisany w artykule może niezależnie zmieniać trajektorię ruchu i sam okrąża przeszkody. W ramach eksperymentu autor stworzył dwa roboty, na których zainstalowano różne źródła energii i silniki. Zasadniczo nie ma ścisłych standardów dotyczących używanych materiałów, najważniejsze jest przestrzeganie podanego schematu podczas montażu robota.

Materiały i narzędzia do produkcji:
- nylonowe opaski w rozmiarze 3x150mm;
- taśma izolacyjna w kolorze czarnym;
- bateria 9 V (6F22);
- dysk laserowy (CD lub DVD bez różnicy);
- obudowa ochronna;
- złącze akumulatora 9 woltów;
- ekscentryczny (kasowanie).

Proces produkcyjny robota:
Pierwszy krok Stwórz podstawę robota
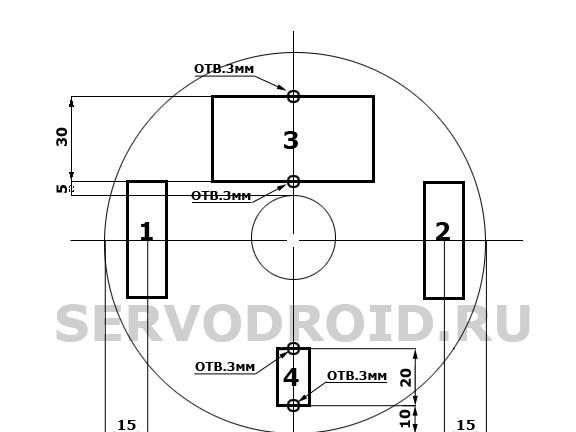
Podstawą robota będzie zwykła płyta CD lub DVD. Zrób w nim dziury wyraźnie zgodnie ze schematem, który jest przedstawiony na zdjęciu. Bez wyjątku wszystkie otwory są wiercone wiertłem 3 mm. Ta średnica jest wystarczająca, gdy jest używana do mocowania nylonowych opasek. Jeśli zdecydujesz się użyć innej metody mocowania, otwory można wiercić w dowolnym innym rozmiarze. Proponowany rysunek jest odpowiedni dla każdego zespołu robota.
Liczby 1 i 2 wskazują miejsca montażu szczotek, akumulator jest zainstalowany w kwadracie z numerem 3, a silnik jest zamontowany w kwadracie 4.
Krok drugi Wykonujemy i instalujemy przeprowadzki
Dzięki napędowi robot będzie się poruszał. Aby je zrobić, musisz wziąć dwie szczoteczki do zębów. Najlepiej, aby szczotki były tej samej wysokości i kształtu włosia. Jeśli kształt jest inny, można go poprawić za pomocą nożyczek.
Teraz włosie musi ustawić kierunek. W tym celu pobierana jest taśma klejąca, a włosie jest owijane w taki sam sposób, jak wskazano na zdjęciu. W tej pozycji pędzel należy trzymać przez około godzinę, aby włosie zapamiętało tę pozycję. Na zdjęciu szara strzałka wskazuje kierunek pochylenia włosia.

Po ustawieniu pożądanego kształtu należy odciąć część za pomocą szczeciny ze szczoteczki do zębów. Następnie musisz wziąć pistolet do kleju i zainstalować szczecinę na dysku w określonych miejscach. Wszystkie prace muszą być wykonane szybko i dokładnie, ponieważ gorący klej stygnie szybko i twardnieje.Musisz spróbować zainstalować pędzle, aby stały równolegle do siebie.
Szczecina szczotek powinna być skierowana do tyłu, innymi słowy, w stronę akumulatora przy 9 woltach. Podczas pracy robot będzie poruszał się w kierunku przeciwnym niż szczecina, tzn. Lokalizacja baterii będzie z tyłu robota.

1 - dysk, 2 - klej topliwy, 3 - otwory do zainstalowania silnika, 4 - otwory do zainstalowania akumulatora. Białe strzałki wskazują kierunek włosia.
Krok trzeci Ekscentryczny
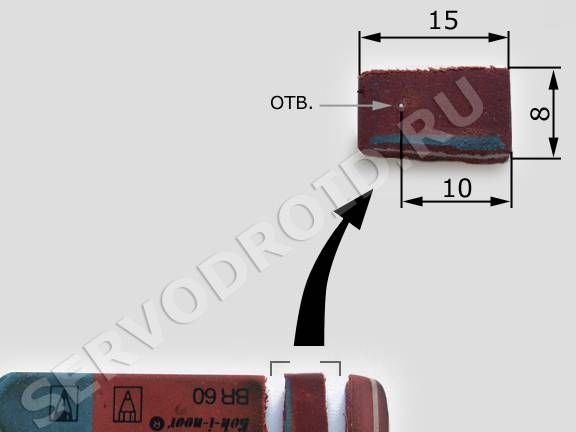
Aby uzyskać wibracje, na wał silnika należy położyć mimośrodę, tj. Niezrównoważony przedmiot. Autor zrobił mimośród gumki, odcinając kawałek odpowiedniego rozmiaru. Zrób dziurę w miejscu wskazanym przez białą strzałkę. Nie powinien być duży, ponieważ mimośród ześlizgnie się z wału silnika. Może być wykonany za pomocą igły.
Krok czwarty Produkcja pokrowca ochronnego.
Ponieważ wibracja jest wytwarzana przez obracającą się gumkę do działania robota, zaleca się ochronę tego miejsca przed różnymi przedmiotami. Ponadto taka ochrona zapewni robotowi bardziej interesujący wygląd. Pokrywa ochronna wykonana jest z papieru, który składa się z kilku warstw. Musisz zrobić cylinder z papieru; jego rozmiar zależy od wielkości silnika. Aby nadać papierowi większą sztywność, można go posmarować klejem, a zatem nałożyć kilka dodatkowych warstw. Lub możesz użyć tektury do tych celów.
Aby stworzyć cylindryczny kształt, silnik jest po prostu owinięty papierem na wierzchu.




Krok piąty Ostateczny montaż robota
Silnik jest instalowany w określonym miejscu, a następnie mocowany za pomocą jastrychu nylonowego. Takie jastrychy można kupić w sklepach specjalizujących się w sprzedaży materiałów budowlanych.
Bateria jest również dokładnie przymocowana. Ważne jest, aby wziąć pod uwagę, że akumulator musi być wyraźnie wyśrodkowany, w przeciwnym razie trajektoria robota może się zmienić. Nawiasem mówiąc, w ten sposób w przyszłości można ustawić trajektorię domowej roboty.


Teraz między złączem zaciskowym a silnikiem musisz zainstalować mały przełącznik. Podsumowując, pozostaje podłączyć złącze do akumulatora i można rozpocząć testowanie robota. Przewody są połączone kolorem.
Jednak w przypadku korzystania z akumulatora Kron nie jest konieczne instalowanie przełącznika; można włączyć robota, podłączając złącze.
Cóż, w drugiej wersji robota możesz po prostu wyjąć baterię z urządzenia, ale oczywiście przełącznik jest bardziej obiecujący.
To wszystko, robot jest gotowy, możesz zacząć testować. Aby osiągnąć pożądany rezultat, możesz spróbować zmienić polaryzację, aby silnik obracał się w przeciwnym kierunku, a robot zachowywał się inaczej.