W artykule omówimy, jak zrobić miniaturowy wibro-robot zrób to sam. Takich roboty po włączeniu zaczynają tańczyć na gładkiej powierzchni, kręcąc kółkami na stole. Wynika to z faktu, że na silniku zainstalowano niezrównoważony ciężar, który wytwarza wibracje. Każdy może złożyć takiego robota w domu, wymaga to minimum umiejętności i materiałów.
W szczególności to model Robot nazywał się Itty Bitty. Tutaj zastosowano silnik wibracyjny ze starego telefonu komórkowego, a robot zasilany jest baterią zegara 3 V.
Materiały i narzędzia do tworzenia robota:
- rozładowana bateria 3V;
- silnik wibracyjny ze starego telefonu komórkowego;
- jeden duży spinacz do papieru;
- lutownica z lutem i topnikiem;
- taśma elektryczna;
- gorący klej;
- marker ciemnego koloru.

Z narzędzi potrzebujesz pilnika, alkoholu i szczypiec.
Proces produkcyjny robota:
Pierwszy krok Utwórz nogi robota
Tworzenie nóg robota jest najważniejszym momentem w tym wszystkim. Działanie całego robota będzie zależeć od tego, jak poprawnie zostaną wykonane. Przede wszystkim nogi powinny być mocne, ponieważ przy wibracjach robot będzie skakał dość mocno. Wykonane są z jednego kawałka drutu. Spinacz do papieru najlepiej nadaje się do tych celów. Przede wszystkim należy go wyprostować, a następnie podzielić na 6 równych części. W rezultacie długość każdej pojedynczej części wyniesie 1/16 cala.



Ważną kwestią podczas pracy z spinaczem jest płynność ruchu. Zbyt szybkie zginanie klipsa może się złamać. Jeśli kąty przekraczają 90 stopni, należy je zaokrąglić.
Teraz musisz wziąć jeden znak i zgiąć klips o 90 stopni w tym miejscu, przy drugim znaku musisz zgiąć w przeciwnym kierunku. Jeśli koniec zgięcia zostanie zaokrąglony podczas gięcia, znacznie zmniejsza to prawdopodobieństwo złamania.



Na trzecim znaku musisz wykonać zakręt 90 stopni, ale miejsce zakrętu powinno znajdować się jak najdalej od końca.
Przy czwartym znaku wykonuje się zakręt 180 stopni, koniec powinien być z tyłu.
Odchylenie o 90 stopni wykonuje się na piątej nodze i powinno być możliwie jak najdalej od pozostałych dwóch sąsiednich nóg. Podsumowując, nogi należy wyregulować, aby wszyscy nie dotykali równomiernie podłogi.


Krok drugi Instalacja silnika
Bateria działa jako element podtrzymujący w takim robocie. Musisz wziąć drżenie i przyczepić do niego wibrator. Następnie jeden z przewodów silnika należy przylutować do styku akumulatora, będzie to styk górny. Aby odłożyć lut, bateria musi być lekko porysowana, można to zrobić za pomocą pilnika.

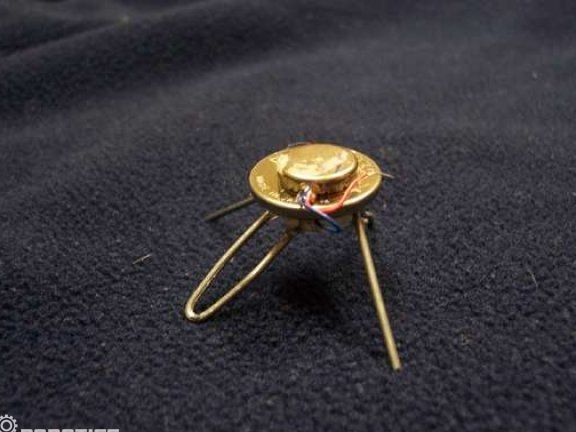
Krok trzeci Przyklej nogi
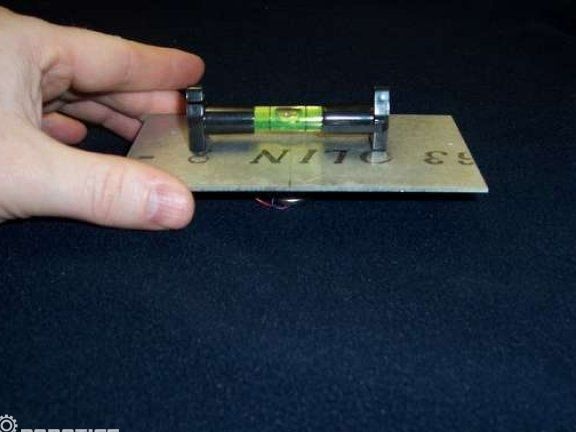
Teraz pozostaje tylko przykleić nogi do robota. Aby to zrobić, musisz położyć baterię na stole, a na niej położyć nogi robota. Następnie nogi muszą zostać dociśnięte; w tym celu na nogi można nałożyć poziomicę lub kawałek aluminium. Przed nałożeniem kleju zaleca się odtłuścić powierzchnię akumulatora alkoholem. Nie ma potrzeby żałować kleju, ponieważ podczas pracy na nogach działa wystarczająco duża siła. Jeśli mocno przykleisz stopy, robot może się rozpaść podczas pracy.
Nie trzeba spieszyć się z uruchomieniem robota, klej musi zostać zestalony. Autor zaleca umieszczenie przedmiotu w lodówce, aby klej szybciej wysychał.


To wszystko, robot jest gotowy i możesz to sprawdzić. Aby włączyć robota, musisz wziąć kawałek taśmy elektrycznej i przykleić drugi przewód od silnika do końcówki akumulatora. Umieszczając robota na gładkim stole, możesz teraz obserwować, co zrobi.