
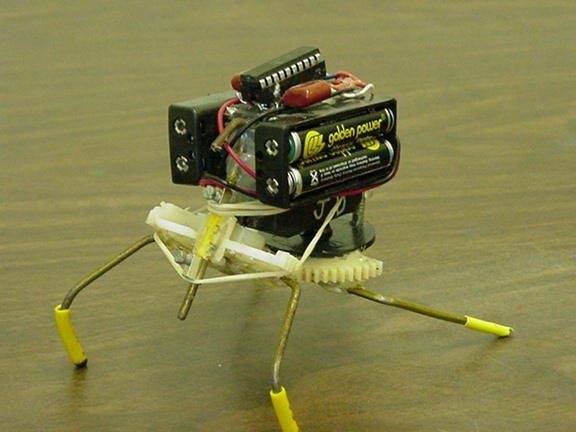
Nie ma nic bardziej interesującego niż chodzący robot, ponieważ takie robot naśladuje najlepsze żywe stworzenia, które żyją z nami na naszej planecie. Stworzenie takiego robota nie jest trudne, ale musisz mieć chęć i pewne umiejętności w dziedzinie elektroniki.
Materiały i narzędzia:
- kawałek drutu miedzianego;
- dwa uchwyty baterii palcowych;
- dwa monolityczne kondensatory ceramiczne o wartości 0,22 mF każdy;
- jeden rezystor 3,3M;
- Oktalowy układ inwertera 74NST240 dla ośmiu kanałów (jeden);
- 20 pinów DIP 74XX240 lub 74XX245 (jeden);
- siłownik (jeden);
- przełącznik;
- jeden plastikowy sprzęt;
- złącze przewodu.
Proces produkcyjny:
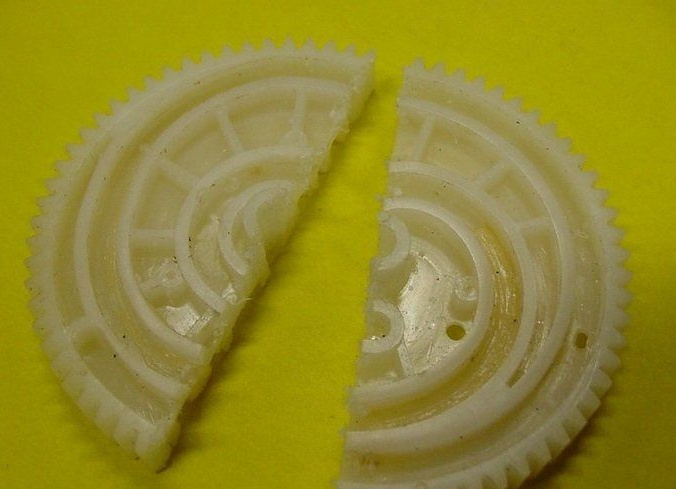
Pierwszy krok Przygotowanie sprzętu
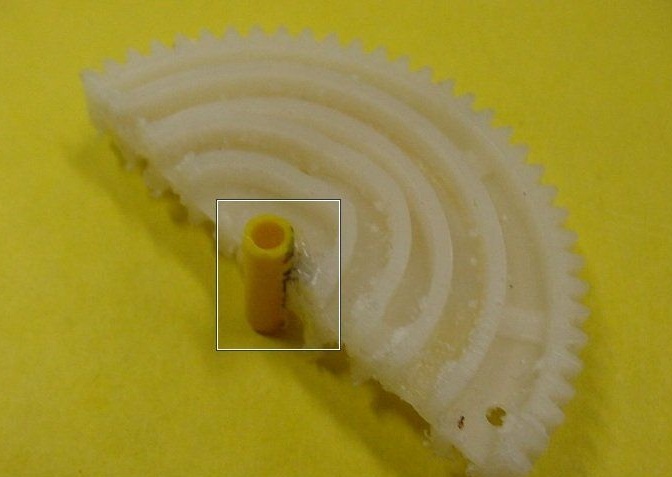
Musisz wziąć plastikowy sprzęt i pokroić go na dwie identyczne części. Następnie musisz usunąć klakson i użyć kleju, aby przymocować go do jednego półkola.

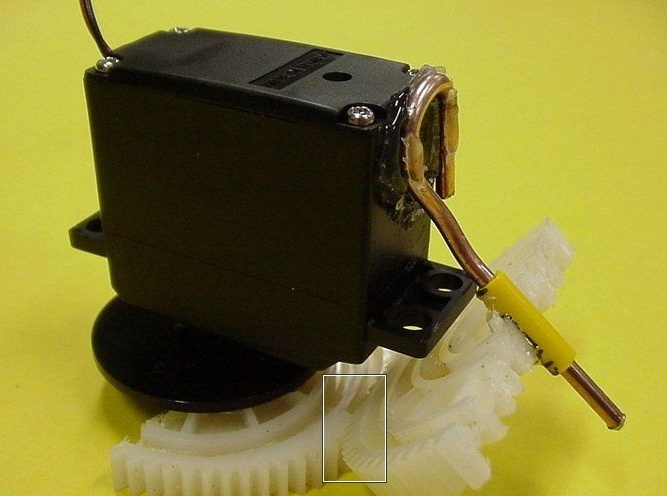
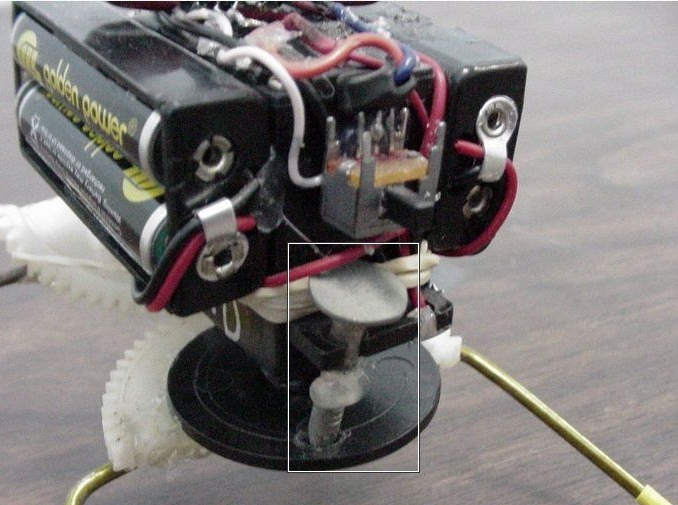
Krok drugi Zmiana silnika
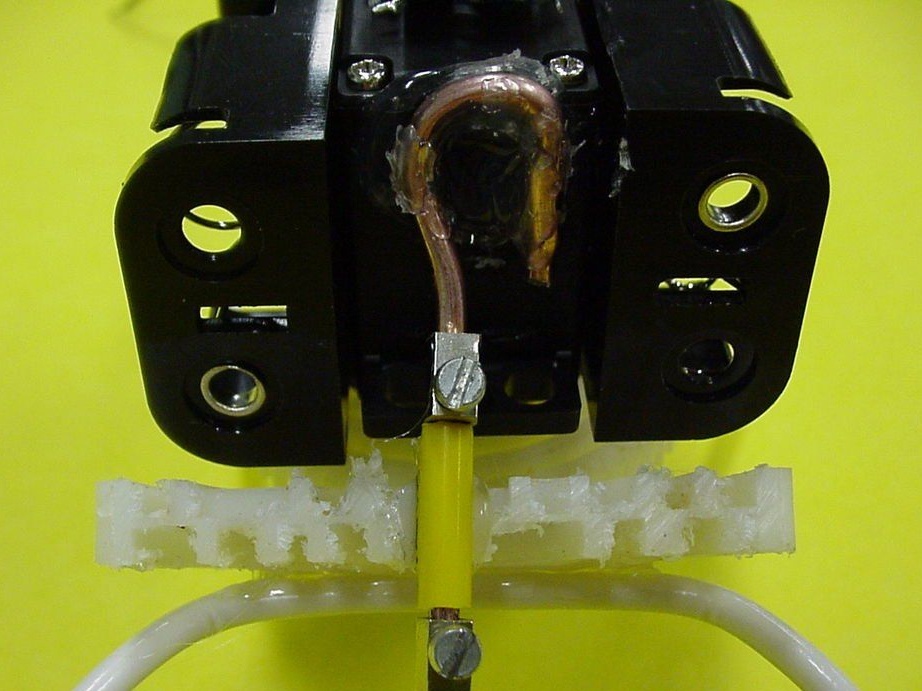
Serwosilnik musi zostać przerobiony, aby działał tylko przy obrocie. Następnie musisz przykleić do niego drut miedziany, jak pokazano na rysunku.
Również na tym etapie będziesz potrzebować plastikowej rurki o odpowiedniej średnicy, należy ją przykleić do półkola. Róg serwomotoru jest następnie umieszczany na swoim pierwotnym miejscu. Następnie umieść plastikową rurkę na miedzianym drucie. Na tym etapie prace można uznać za zakończone.
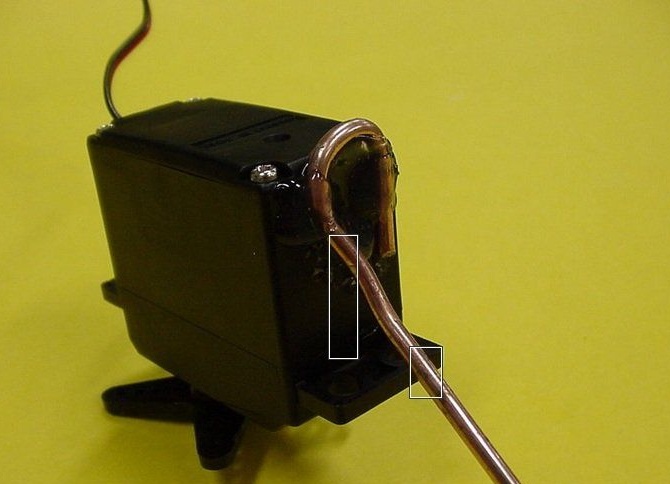

Krok trzeci Tworzenie i instalowanie łap robota
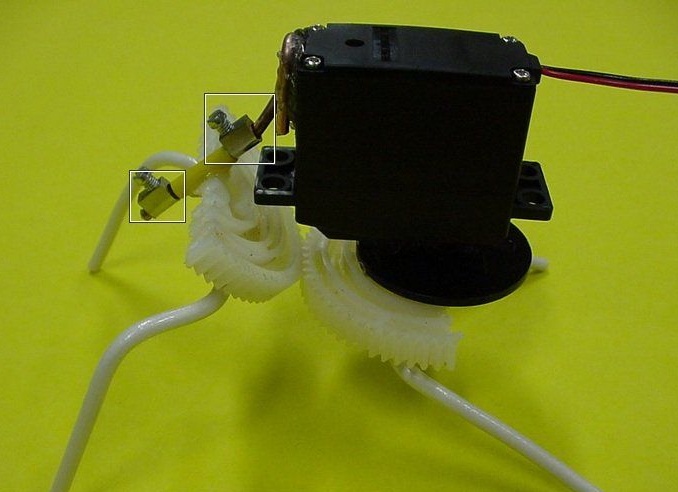
Drut miedziany służy jako nogi, należy go zgiąć zgodnie z rysunkiem. Następnie autor przykleja łapy do półkoli. Teraz możesz również przymocować uchwyty baterii do siłownika.


Krok czwarty Praca z elektroniką
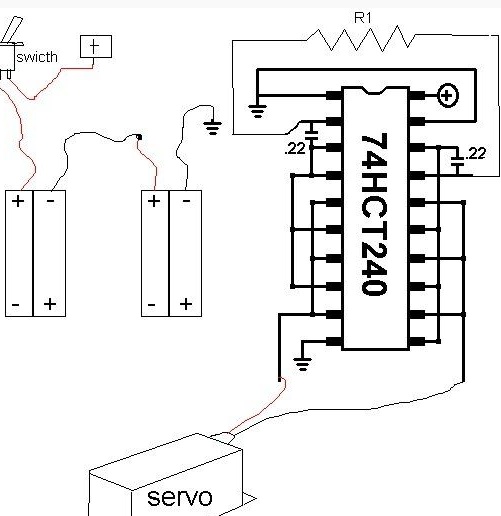
Być może jest to najtrudniejszy i najważniejszy moment. Cały system musi być podłączony wyraźnie, jak pokazano na schemacie. Zaraz po podłączeniu robot będzie gotowy i można go przetestować.

Zmieniając kąt nóg, można uzyskać różne cechy robota. Możesz to zrobić szybciej lub wolniej. Możesz również wyposażyć robota w dodatkowe elementy sterujące, na przykład wąsy, dzięki którym będzie on określał przeszkodę. Możesz również wyposażyć robota w oczy w postaci diod LED, co stworzy jeszcze większy realizm podobieństwa żywego stworzenia.
Musisz uruchomić takiego robota na płaskiej powierzchni. Aby zapobiec ześlizgiwaniu się jego nóg, Cambrices można nosić na ich końcach.