

Wykonanie takiego robota własnymi rękami nie będzie wcale trudne, a nawet interesujące. Rezultatem jest bardzo interesujące urządzenie, które będzie się zachowywać jak żywe stworzenie. Wszystko to dzięki dwóm małym silnikom napędzającym robota. Zmieniając kąt natarcia wałów silnika, możesz uczynić robota szybszym lub wolniejszym. Możesz także eksperymentować z różnymi końcówkami, które można nosić na wale silnika.
Materiały i narzędzia:
- dwa małe silniki (3 wolty, można znaleźć w zabawkach dla dzieci);
- uchwyt na baterie (możesz to zrobić sam lub wyciągnąć ze starego pilota, latarki itp.);
- dwa przełączniki typu SPDT (można je uzyskać ze starej myszy komputerowej);
- dwa małe i jeden duży spinacz do papieru;
- małe koło z zabawki;
- cienkie okablowanie

Proces produkcyjny:
Pierwszy krok Okablowanie lutownicze
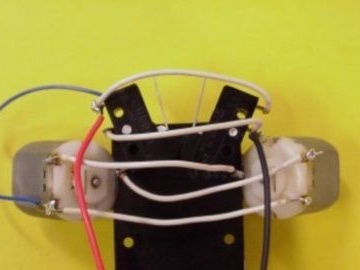
Przede wszystkim musisz przygotować przewody i przylutować je do wszystkich elementów elektronicznych, aby później wygodnie było połączyć węzły. Przewody należy przyciąć na długość 6 cm i usunąć z ich końców o około 1 cm Teraz trzeba przylutować dwa przewody do silników i przełączników. Nie zapomnij również przylutować dwóch przewodów do styków uchwytu baterii. Inne końce drutów są korzystnie ocynowane.

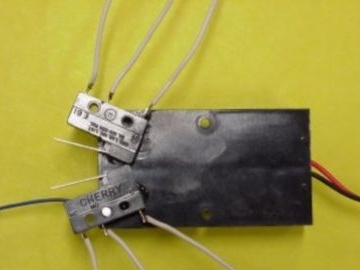
Krok drugi Ustawianie przełączników
Aby ustawić przełączniki, uchwyt baterii należy odwrócić do góry nogami. Teraz musisz przykleić przełączniki klejem do uchwytu baterii. W rezultacie powinna powstać litera V.
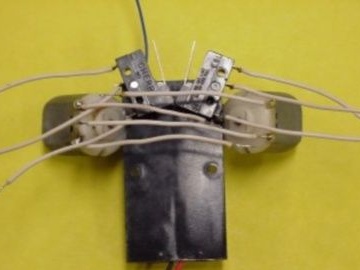
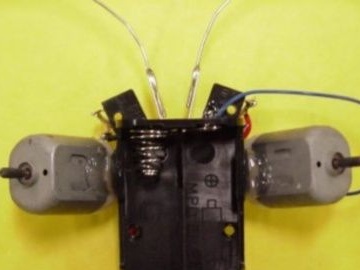
Krok trzeci Instalacja silnika
Silniki należy przymocować do uchwytu akumulatora pod kątem, jak pokazano na rysunku. Kąty po obu stronach muszą być takie same, w przeciwnym razie robot nie będzie działać poprawnie. Wały silnika muszą opierać się o jezdnię. Silniki można montować za pomocą kleju.

Krok czwarty Montaż koła stabilizatora
Stabilizator jest potrzebny do tego domowej roboty stał płasko na drodze. Aby zrobić koło, możesz użyć rolki z magnetofonu lub koła z zabawki dla dzieci. Jeśli chodzi o „wtyczkę”, jest ona wykonana z długiego spinacza do papieru lub sznurka.Podsumowując, stabilizator przylega równomiernie do uchwytu baterii.

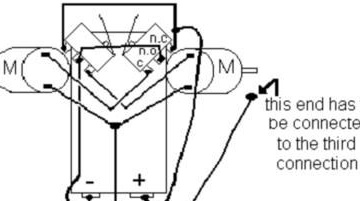
Krok piąty Połączenie okablowania
Aby robot działał poprawnie, wszystkie przewody muszą być wyraźnie połączone zgodnie ze schematem. Obwód można zobaczyć na zdjęciu.

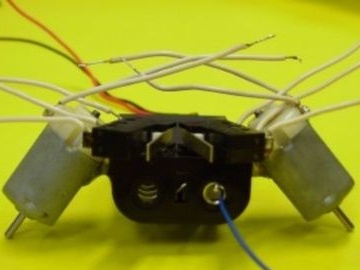
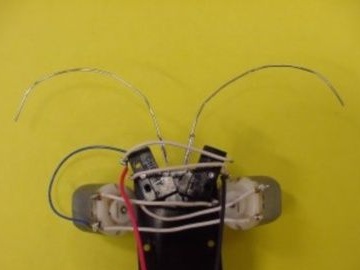
Krok szósty Robienie wąsów dla błędu
Wąsy będą służyły za koło dla chrząszcza, gdy tylko przeszkoda spotka się na jego drodze, wąs włączy przełączniki, a następnie silniki obrócą robota w innym kierunku. Gdy przełącznik jest aktywowany, jeden z silników wyłącza się i wyzwala się pewien rodzaj mechanizmu różnicowego. Jeśli oba przełączniki są aktywowane, robot zatrzymuje się całkowicie. Wąsy są wykonane z małych spinaczy do papieru, należy je ostrożnie przykleić do przycisków przełączników.

Siódmy krok. Ostateczna wersja i testowanie robota
Na ostatnim etapie na wałach silnika należy zainstalować gumowe końcówki, które są potrzebne do lepszej przyczepności. Mogą być wykonane z cambricu.
To wszystko, robot jest gotowy. Musisz uruchomić go na gładkiej powierzchni, na przykład na stole lub linoleum. Ponieważ łapy chrząszcza są zbyt małe, nie będzie czołgać się po dywanie, w tym celu konieczne będzie zwiększenie końcówek wałków silnika.
W przyszłości robot może zostać ulepszony według własnego uznania. Na przykład może wykonać oczy LED, które zaświecą się w kontakcie z przeszkodą.