
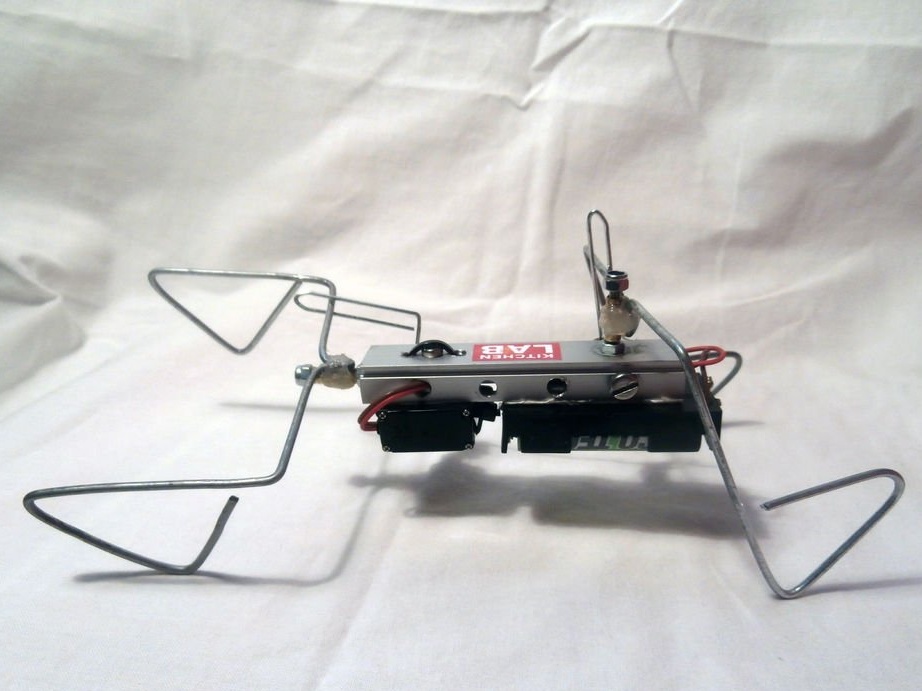
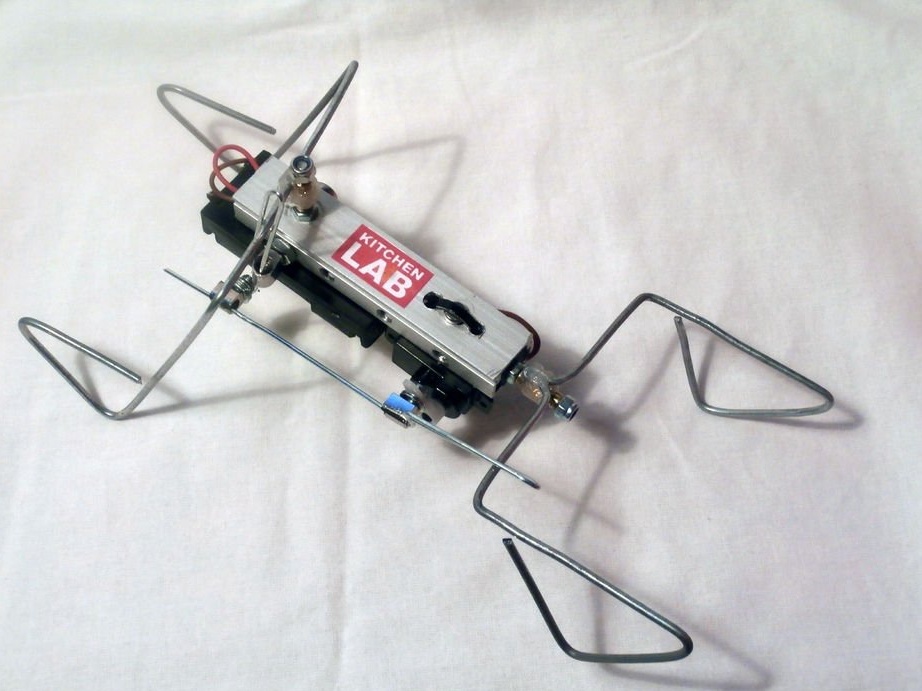
Witam wszystkich! Zainspirowałem się do stworzenia mojego robota BEAM, ponieważ widziałem dość tych jednosilnikowych i dwusilnikowych cudów robotyki w Internecie. Pomysł polegał na stworzeniu robota kroczącego, który chodziłby w taki sam sposób, jak 1- lub 2-silnikowy BEAM-walker. Po kilku nieudanych eksperymentach zrobiłem, co chciałem!
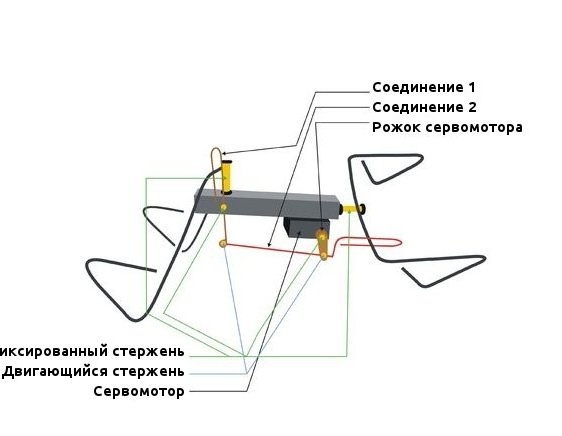
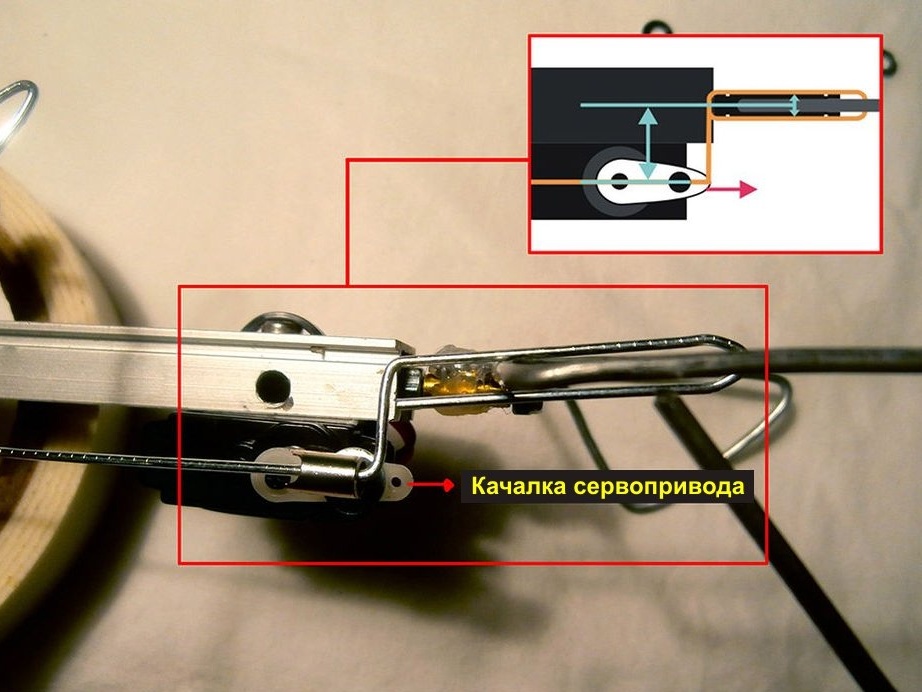
Krok 1: Mechanizm
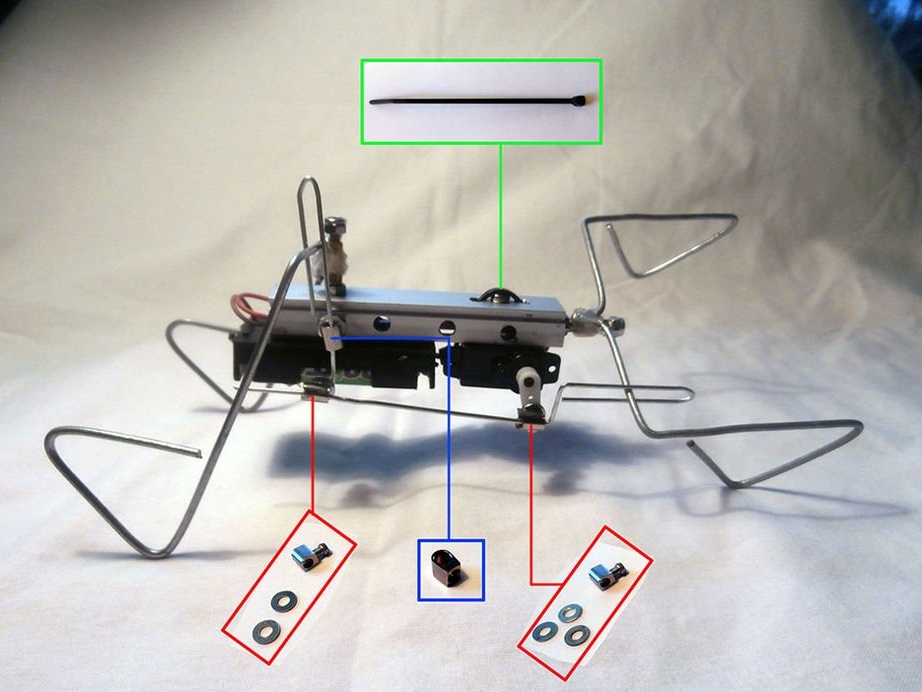
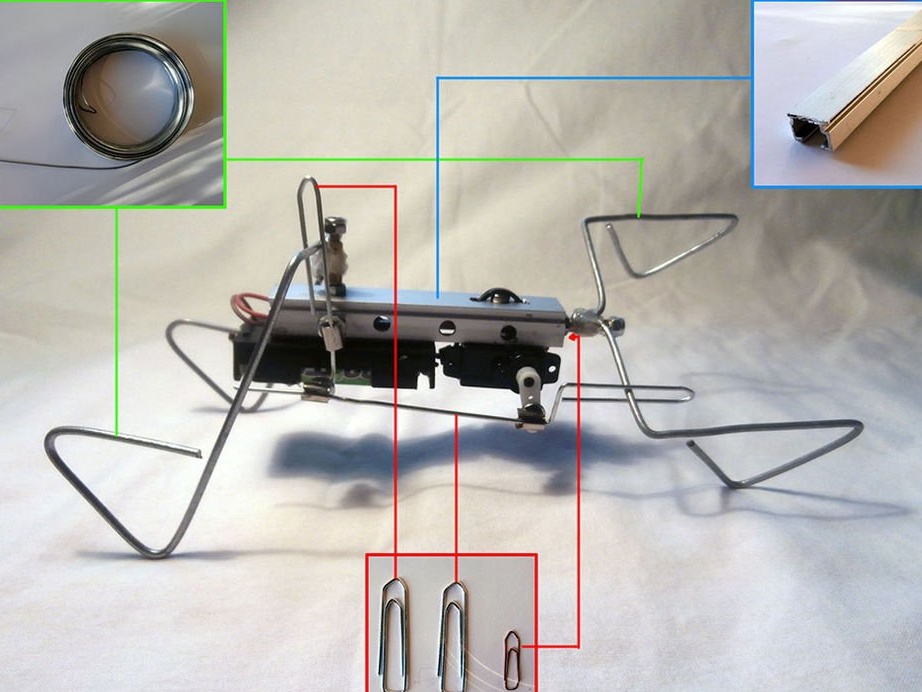
Krok 2: Wymagane części

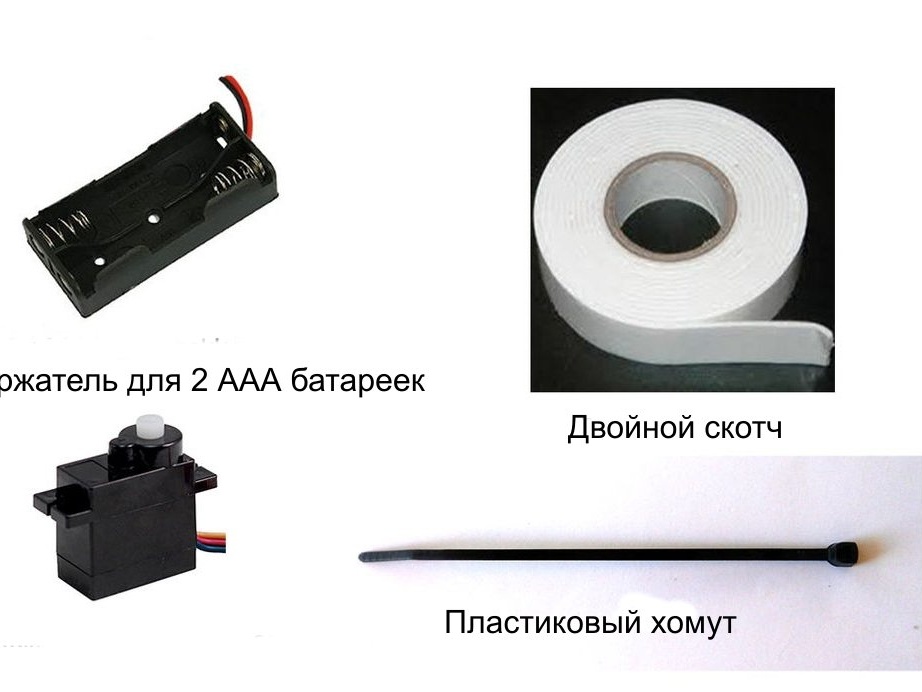



(1x) serwo z ciągłym obrotem
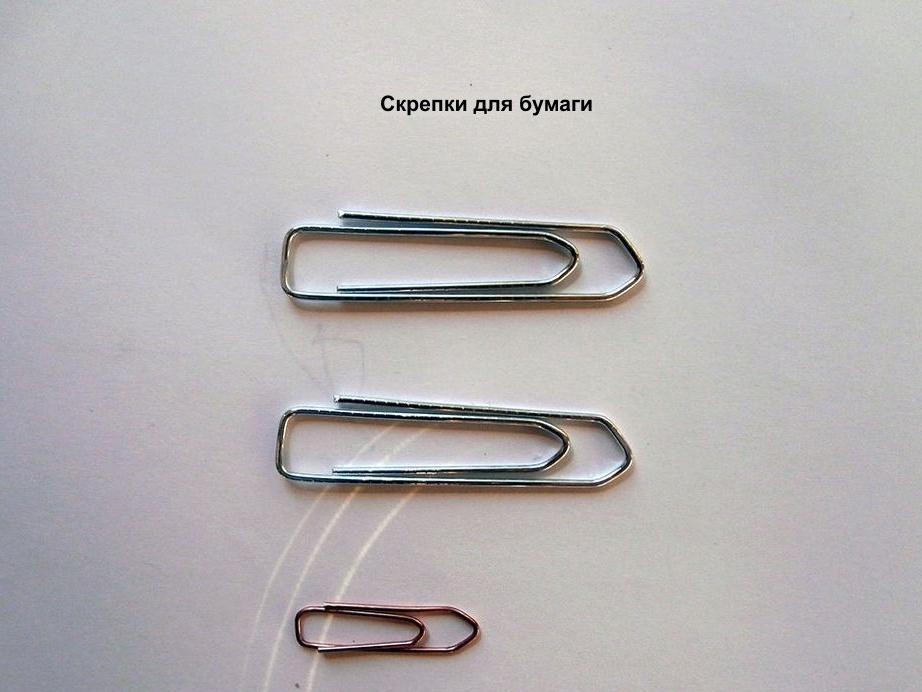
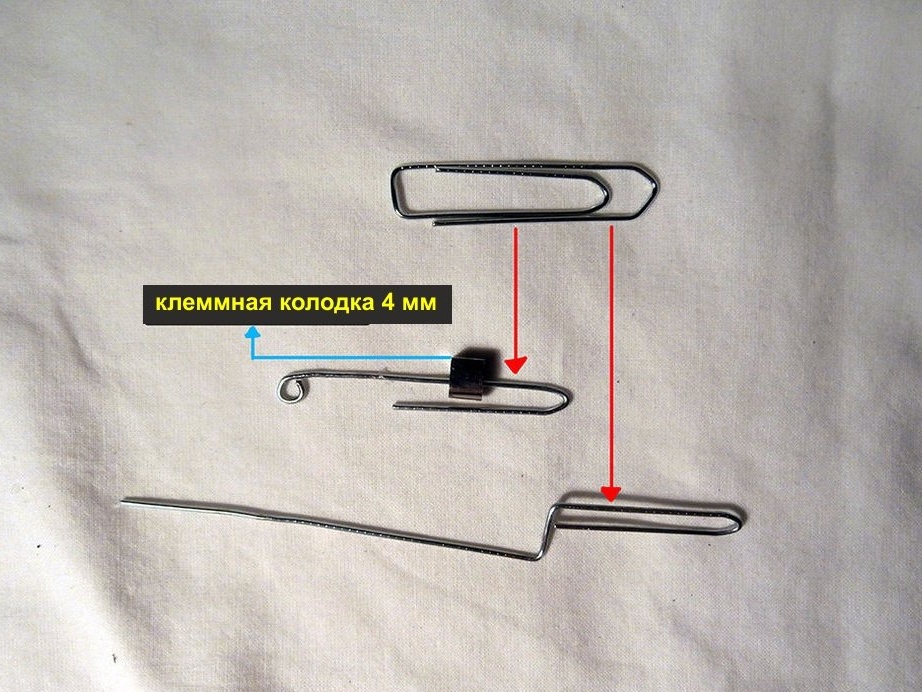
(2x) duże spinacze do papieru
(1x) mały spinacz do papieru
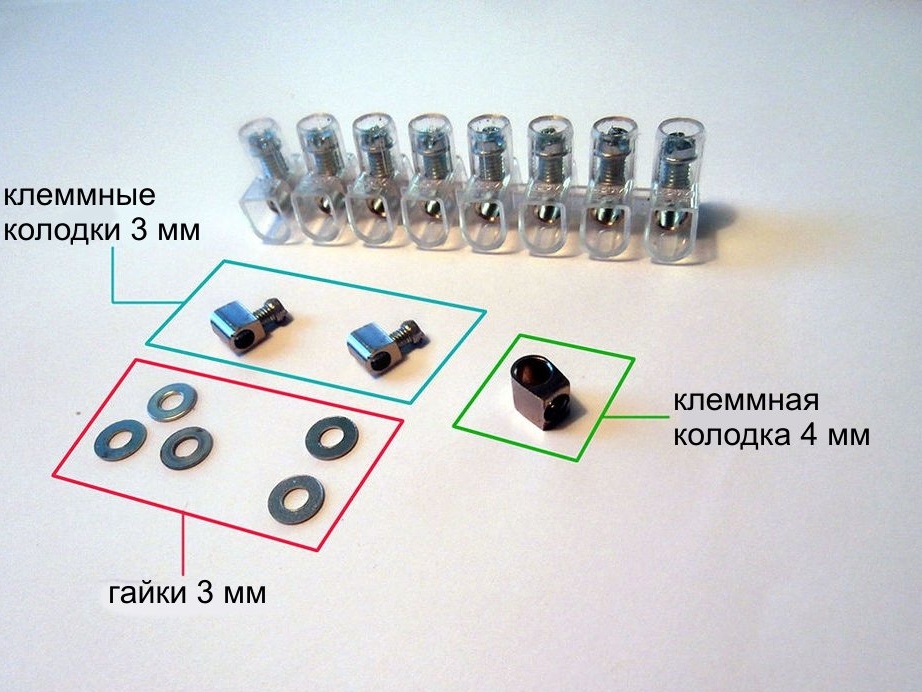
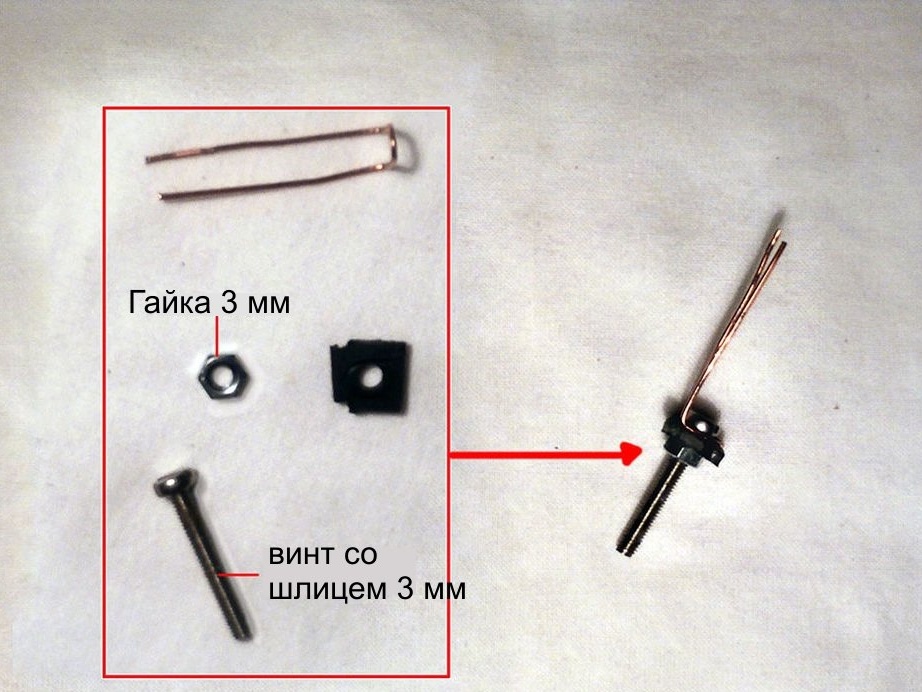
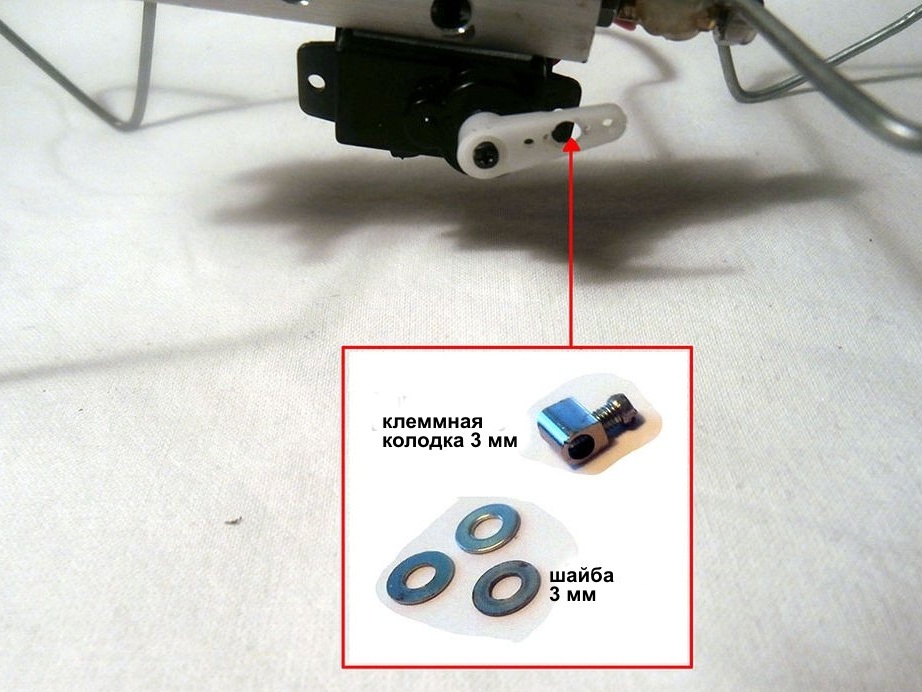
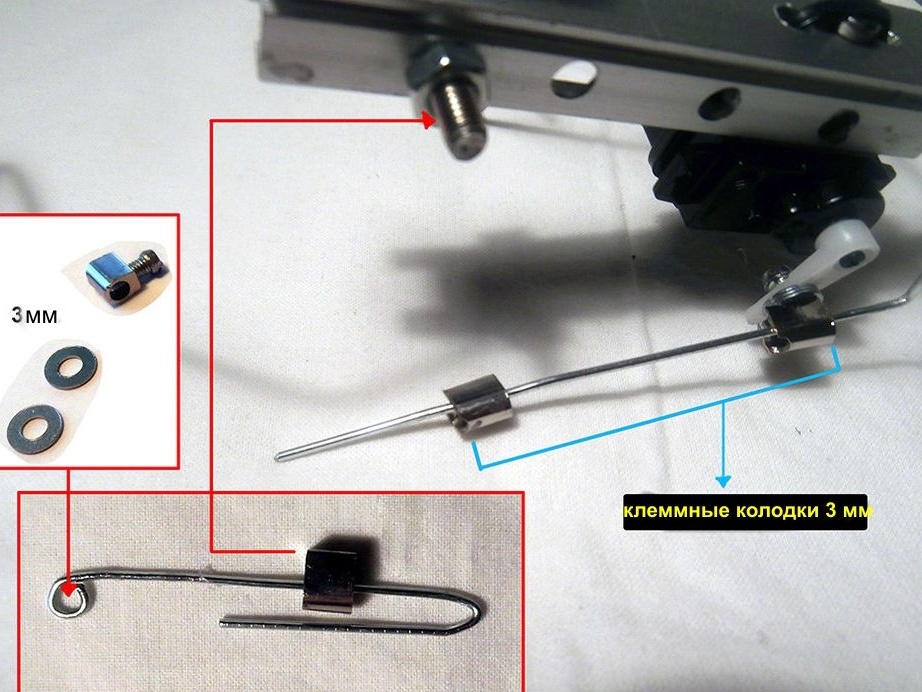
(2x) listwy zaciskowe (3mm)
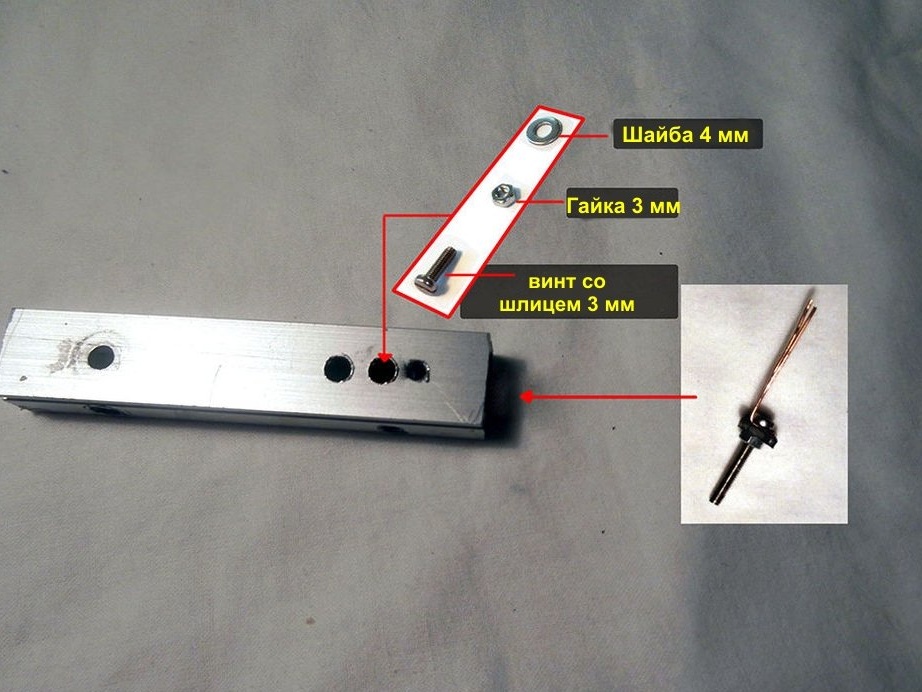
(1x) listwy zaciskowe (4 mm)
(1X) Używany blok z profilu aluminiowego
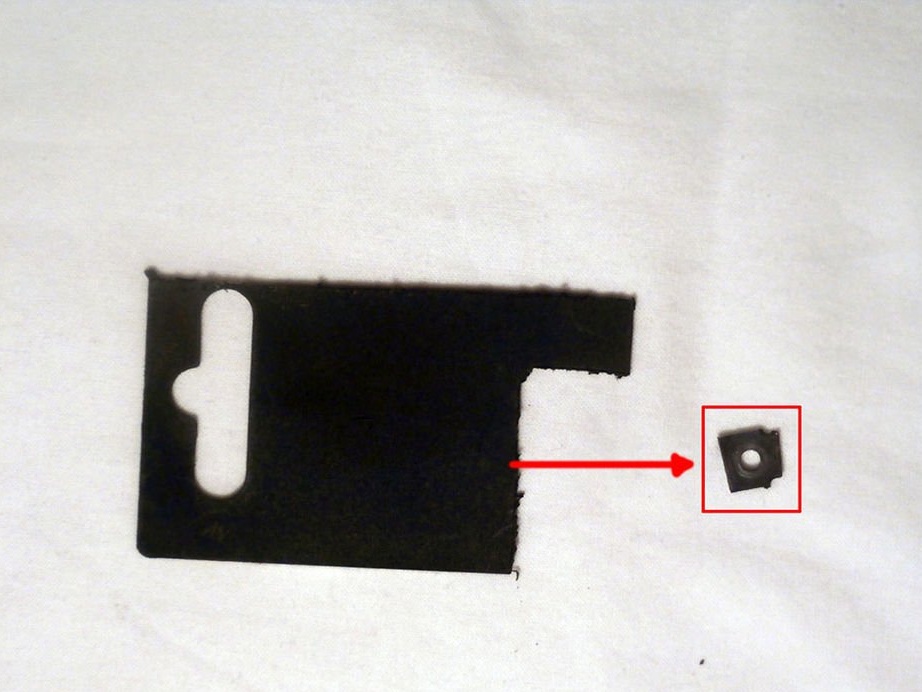
(1X) kawałek plastiku
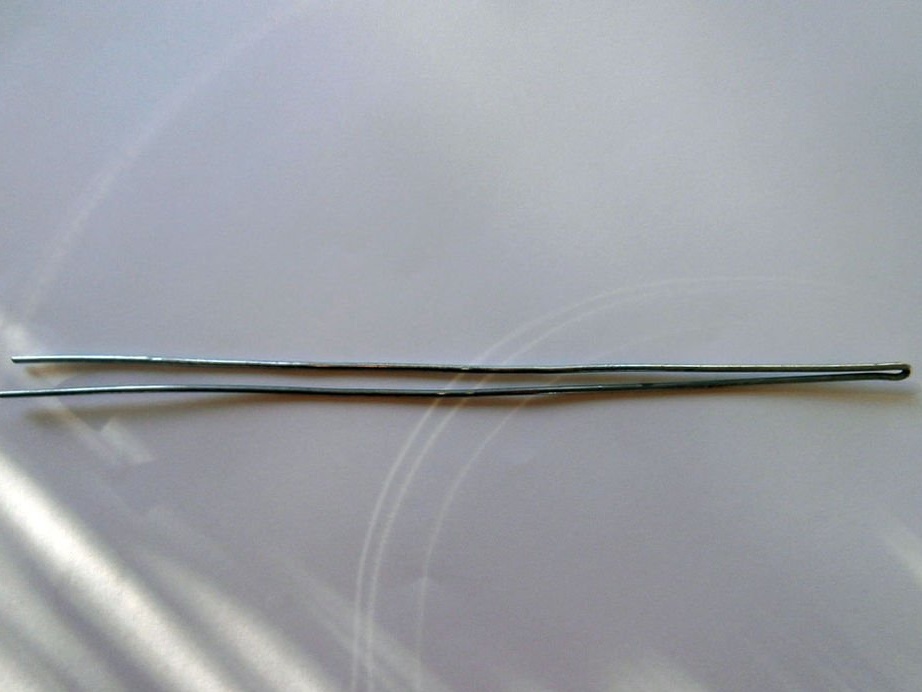
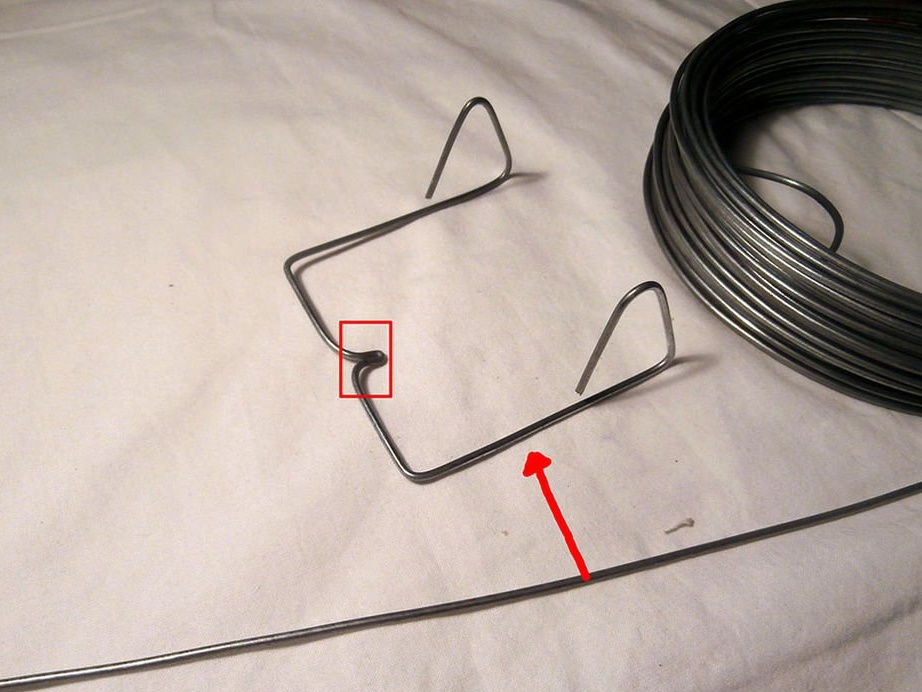
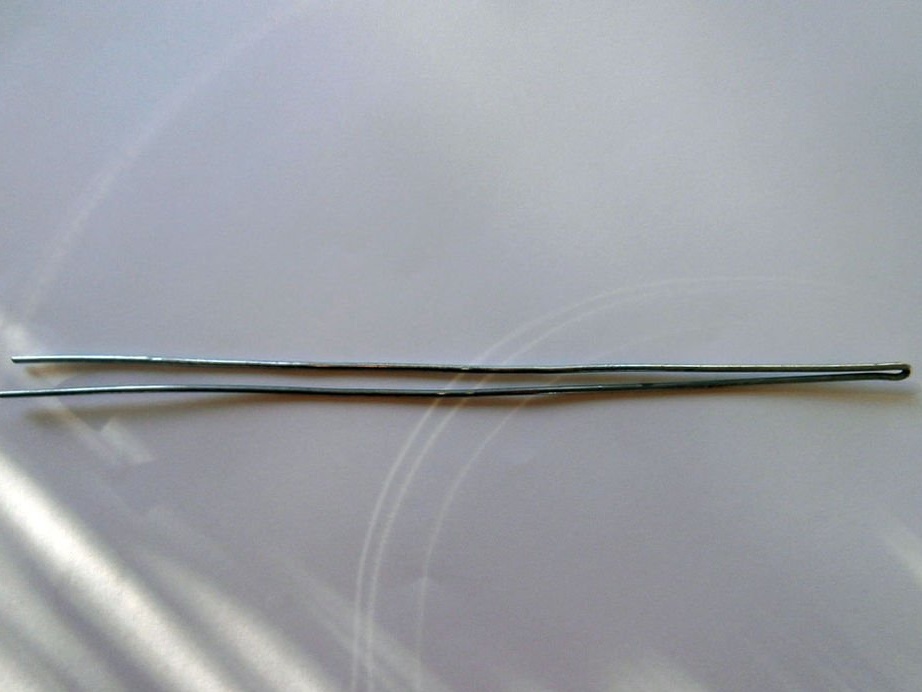
Drut stalowy (2 mm)
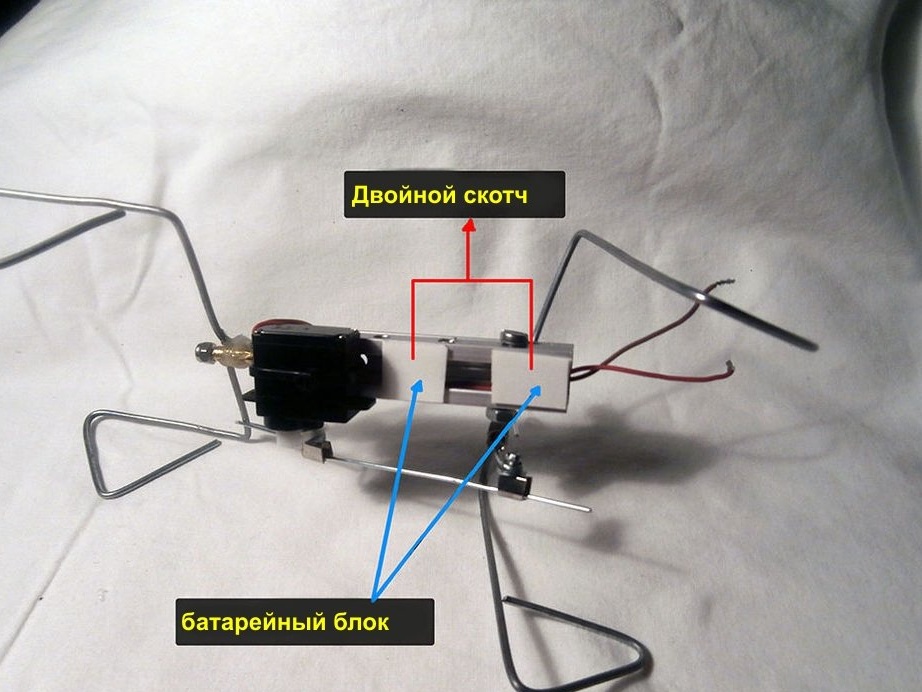
Podwójna taśma klejąca
Mosiężna rura
(1X) mały zacisk
(1X) akumulator (2 x AAA)
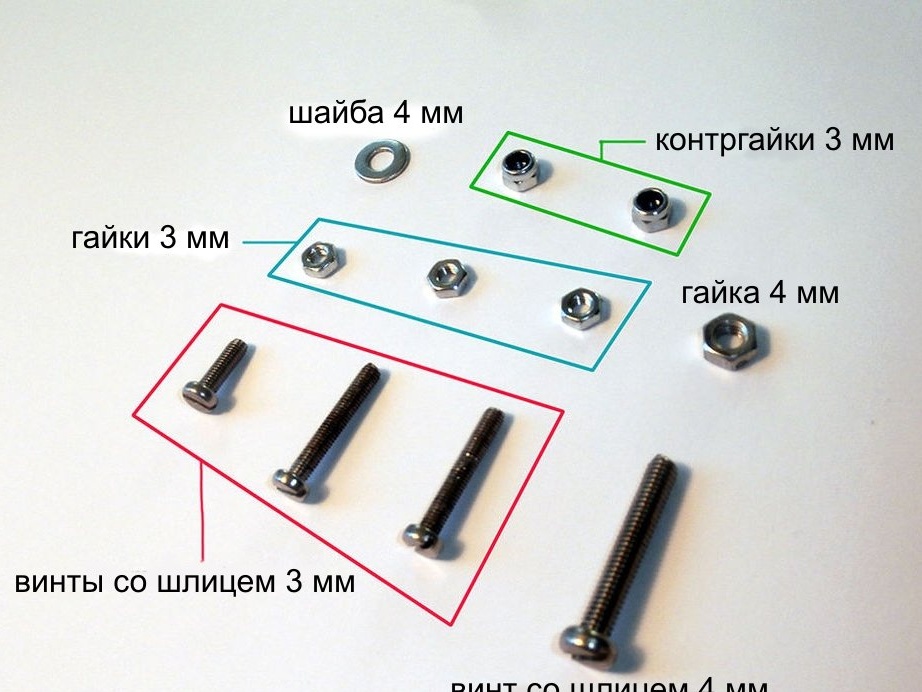
(2X) przeciwnakrętki (3 mm)
(3X) nakrętki i śruby (3 mm)
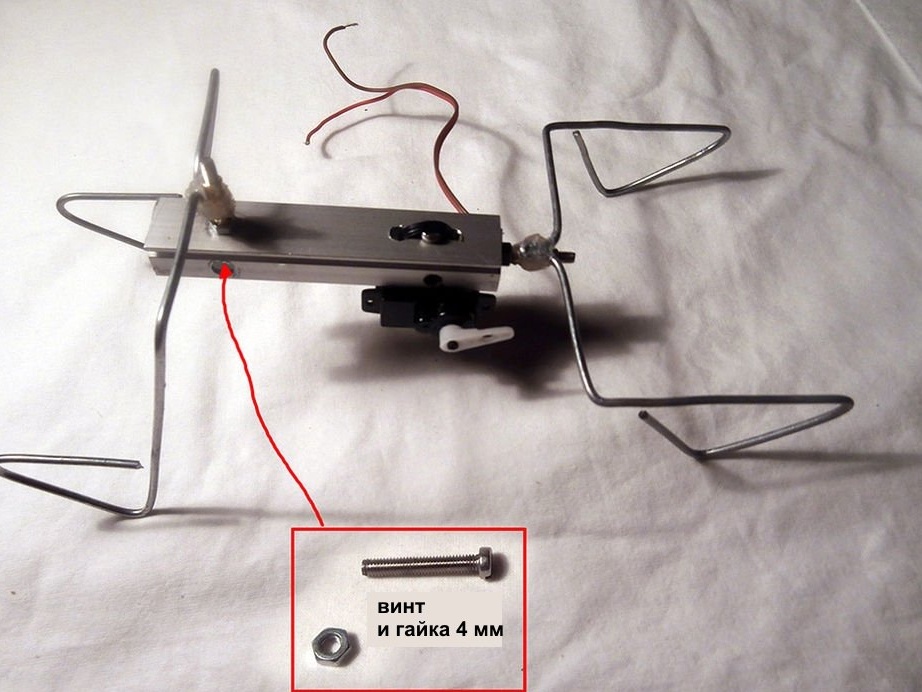
(1x) nakrętki i śruby (4 mm)
(5x) podkładka (3 mm)
(1X) podkładka (4 mm)
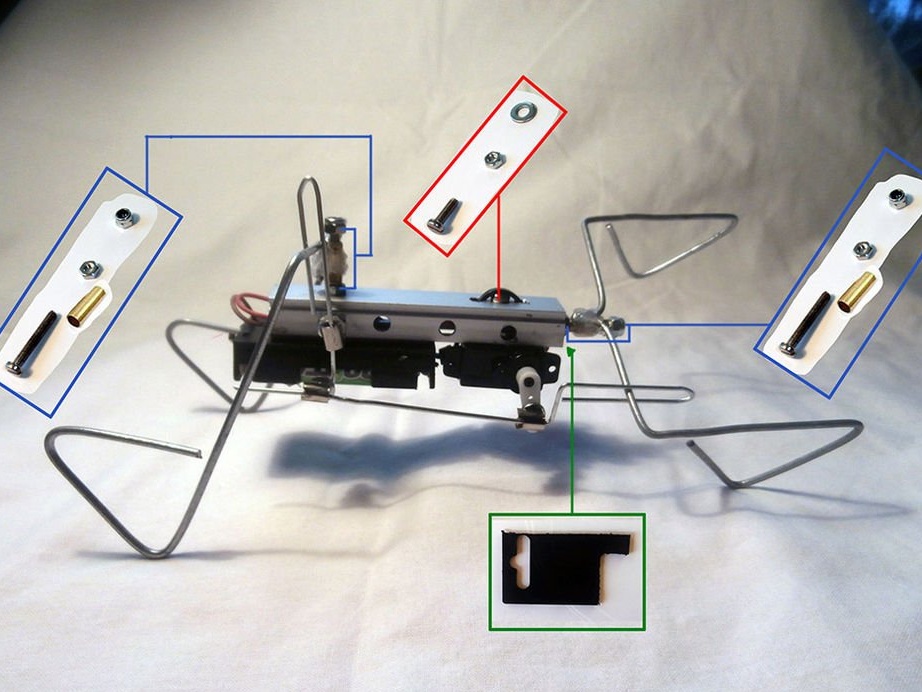
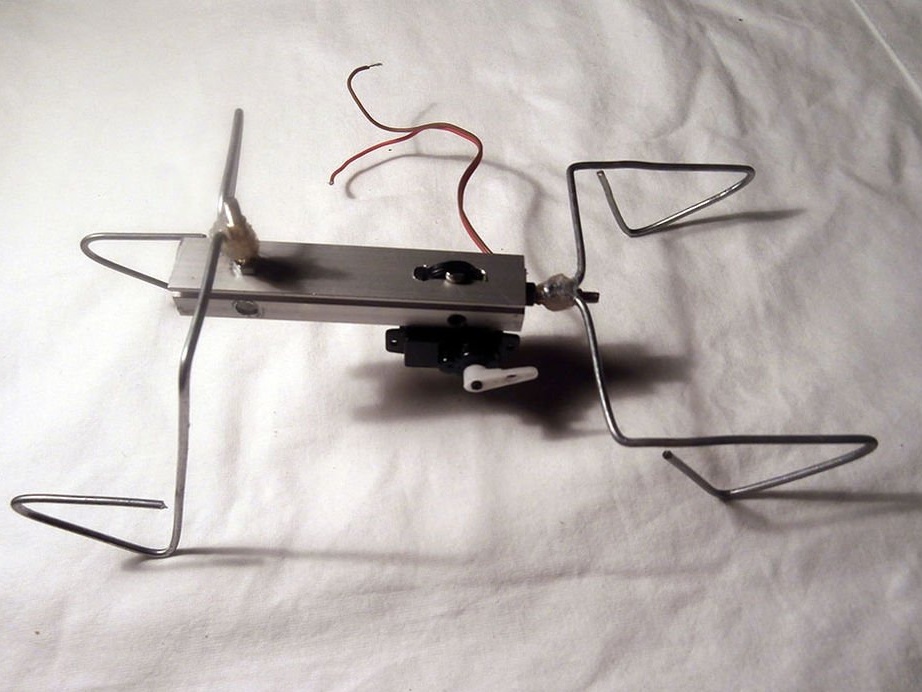
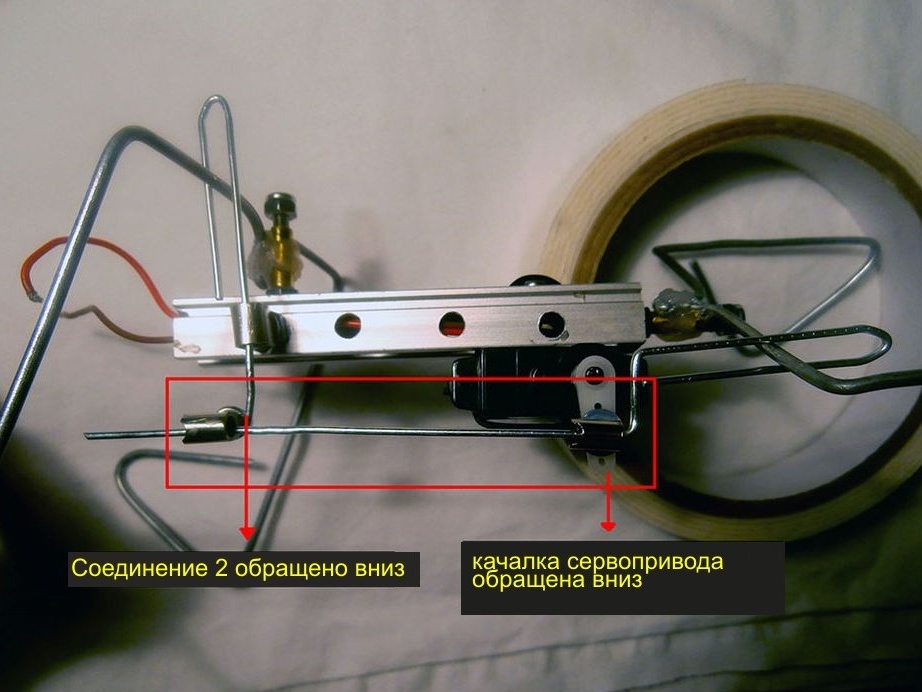
Krok 3: Montaż części
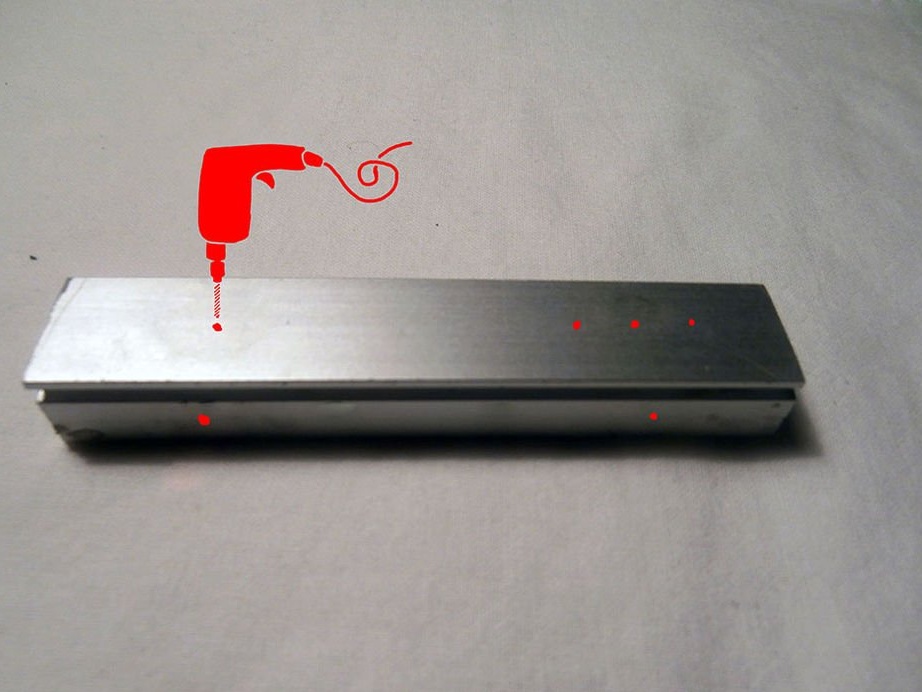
Krok 4: Narzędzia
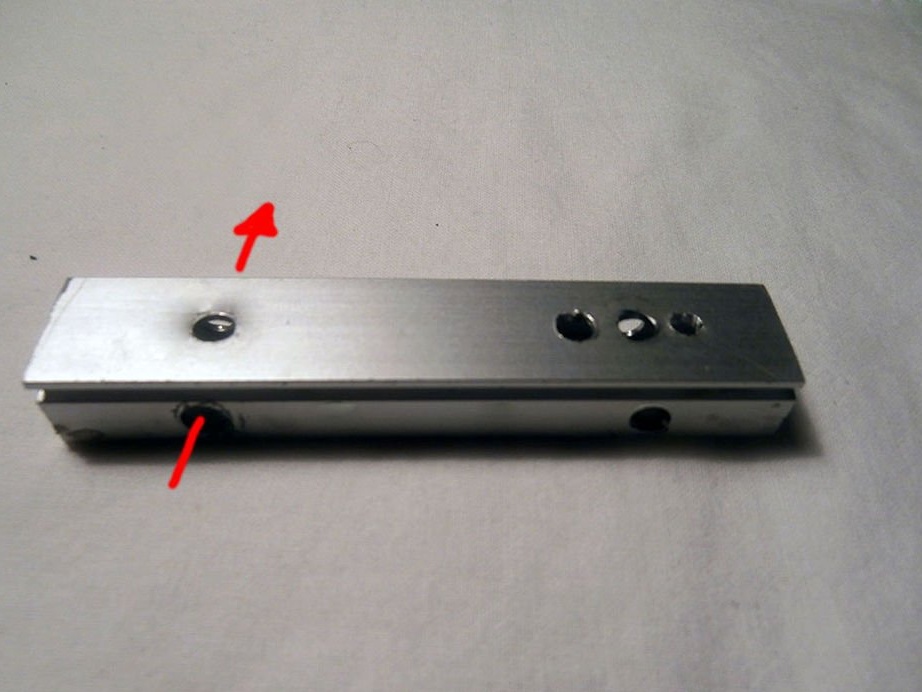
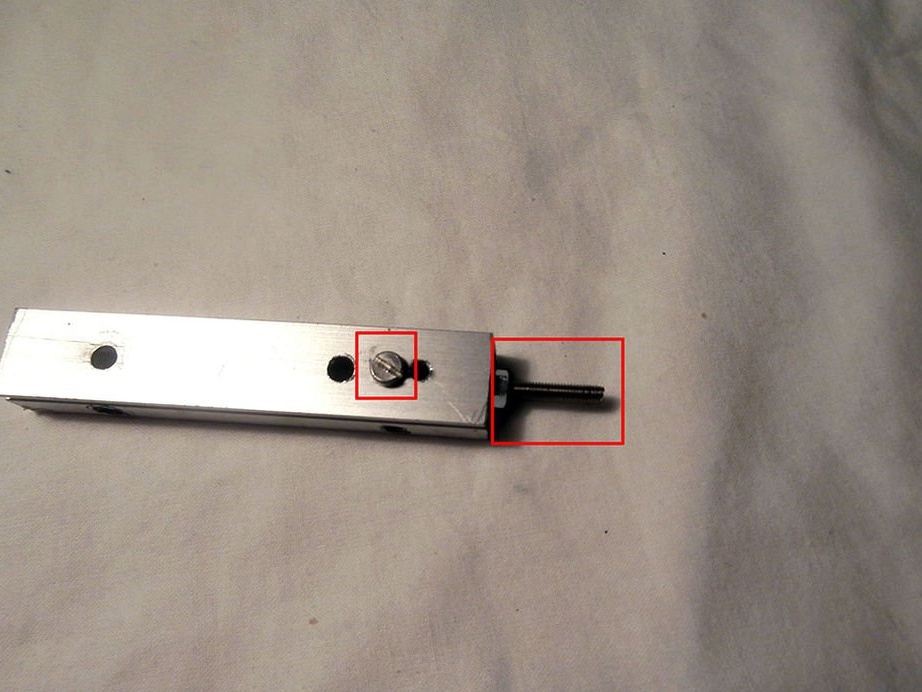
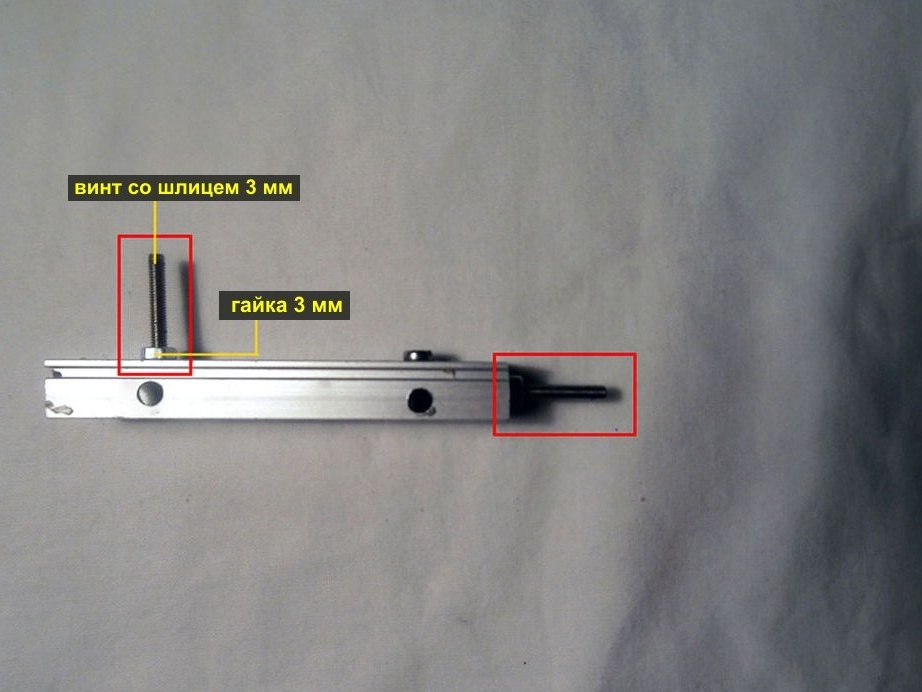
Krok 5: Obudowa

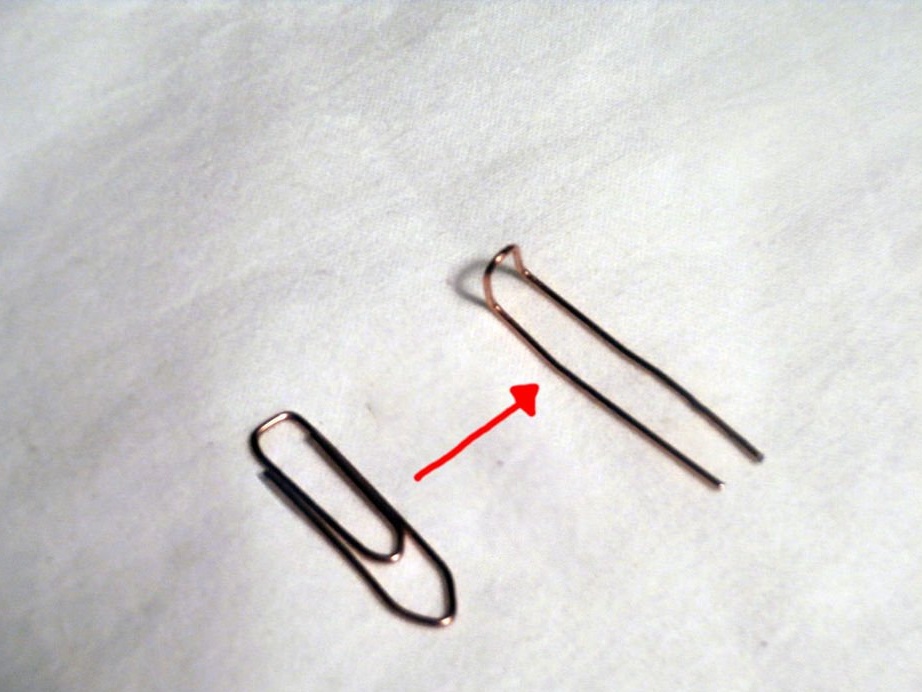

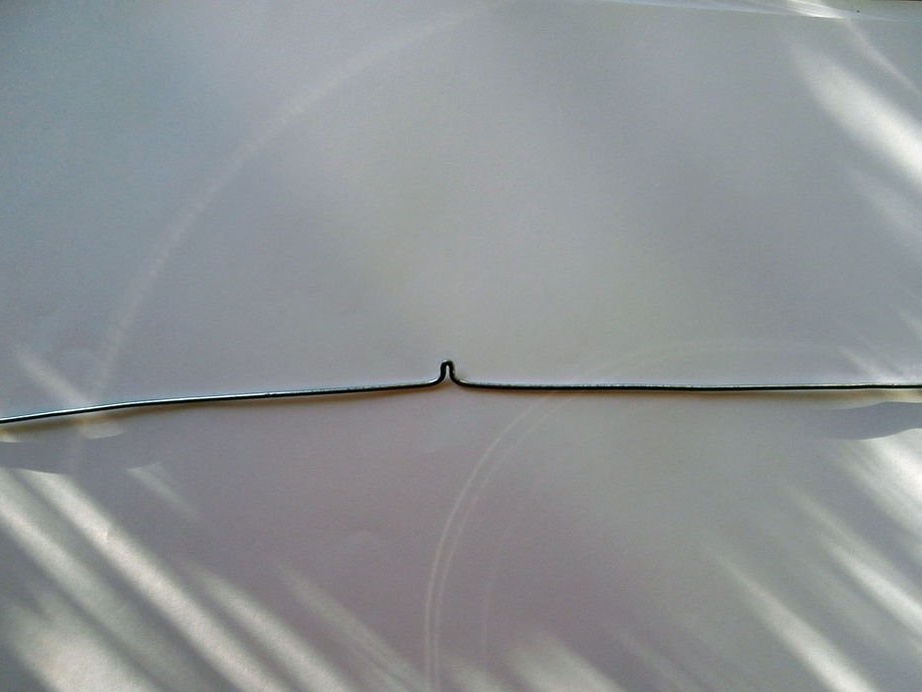
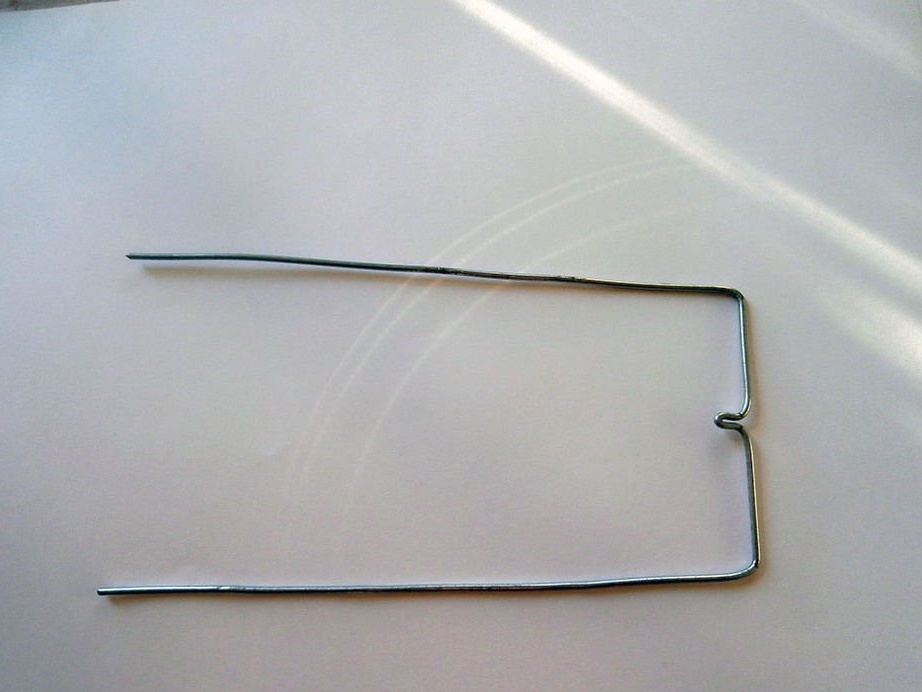
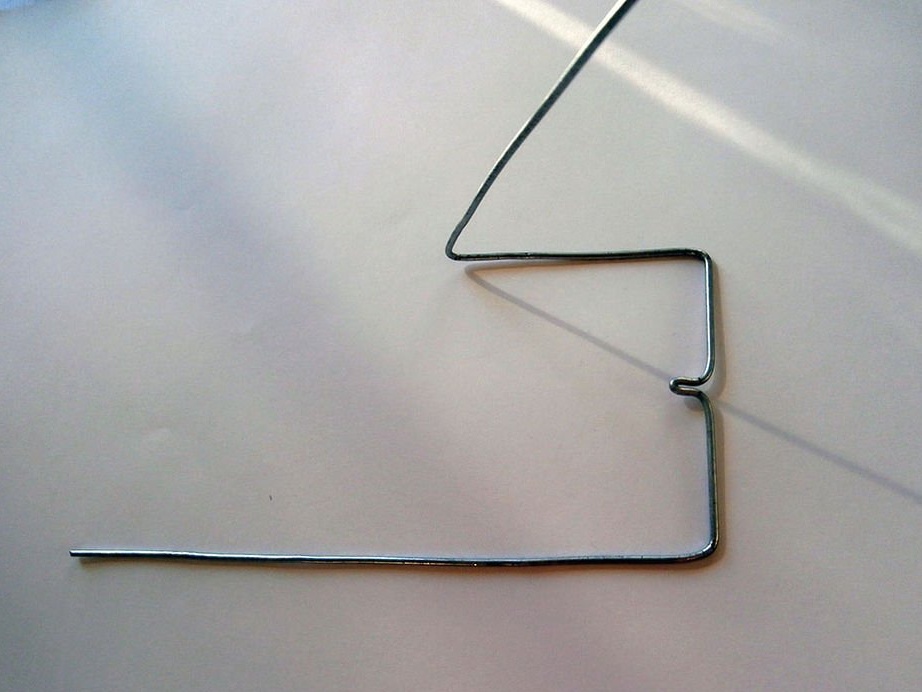
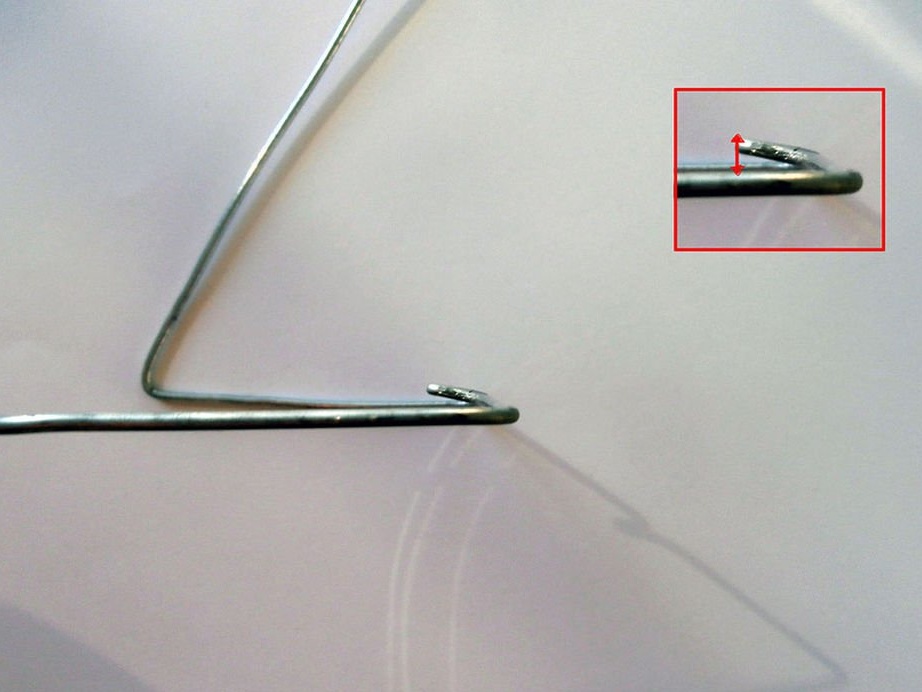
Krok 6: przednie nogi
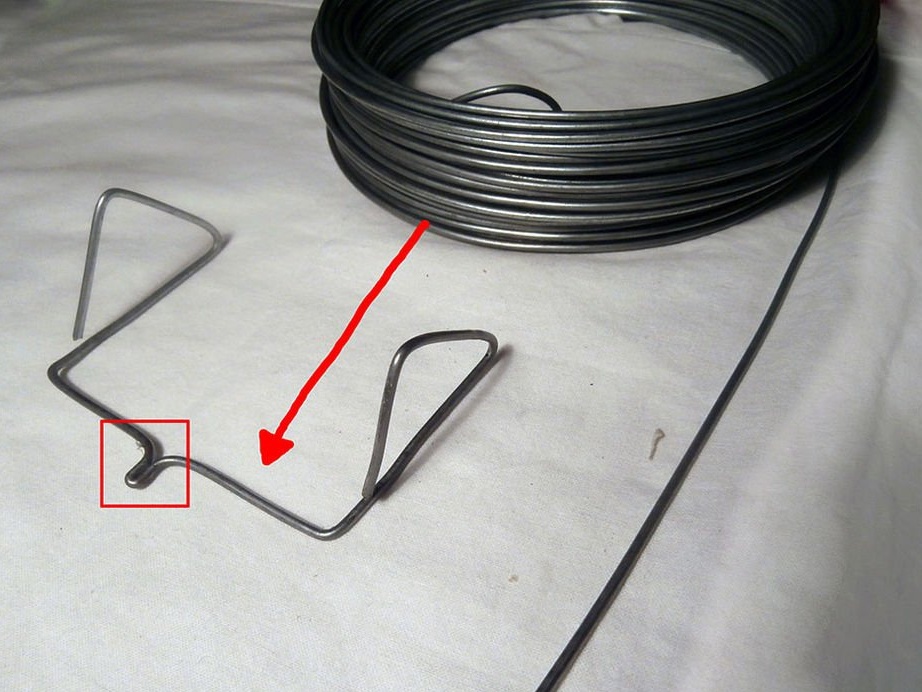
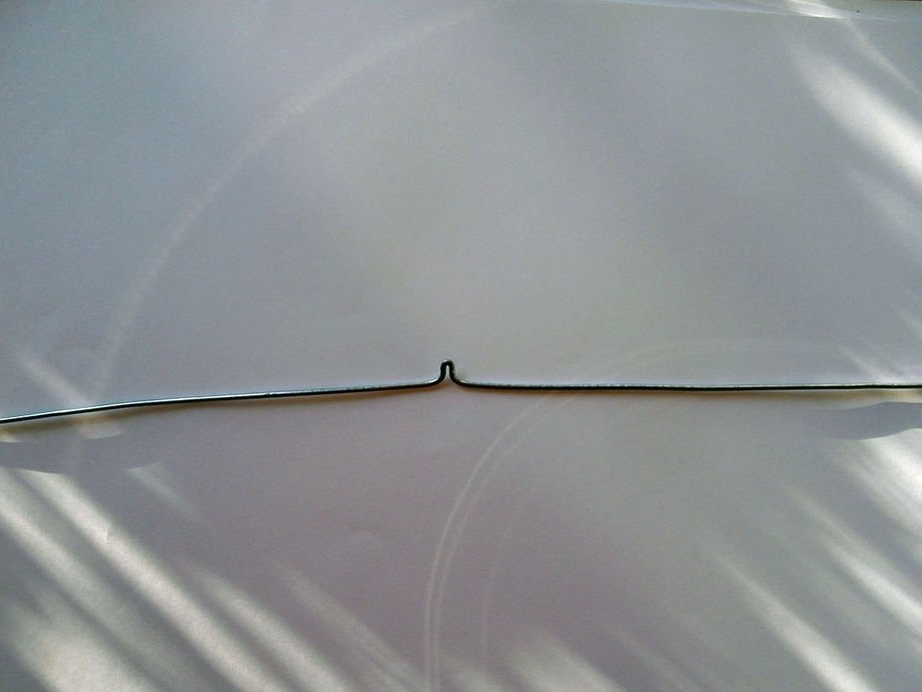
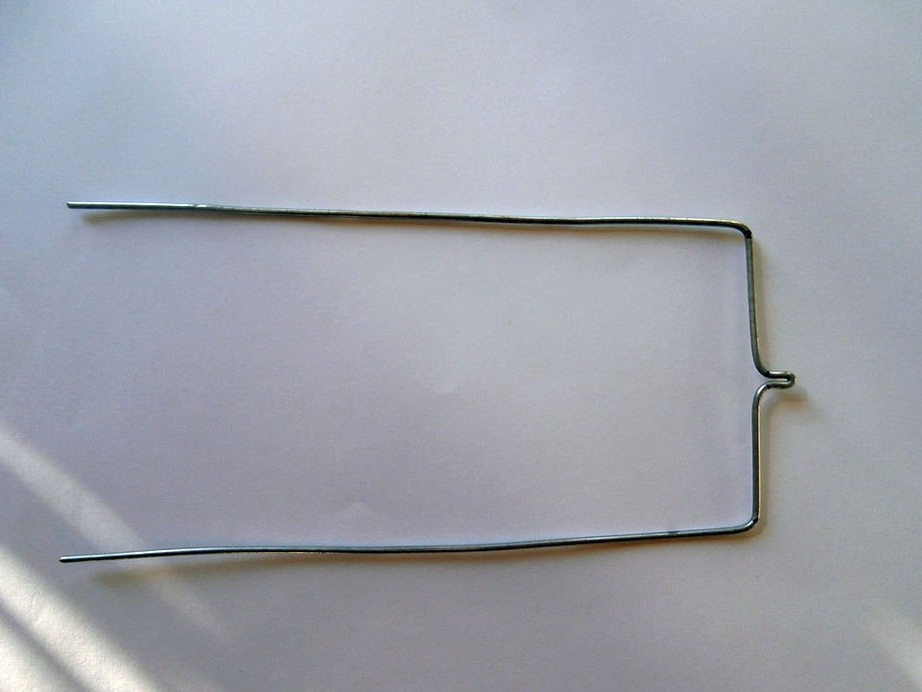
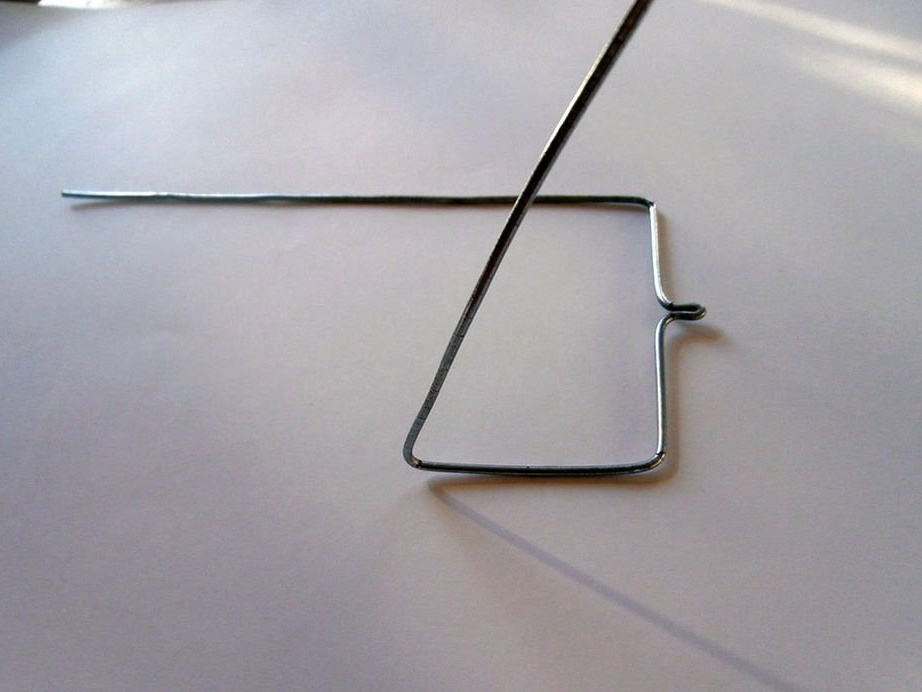
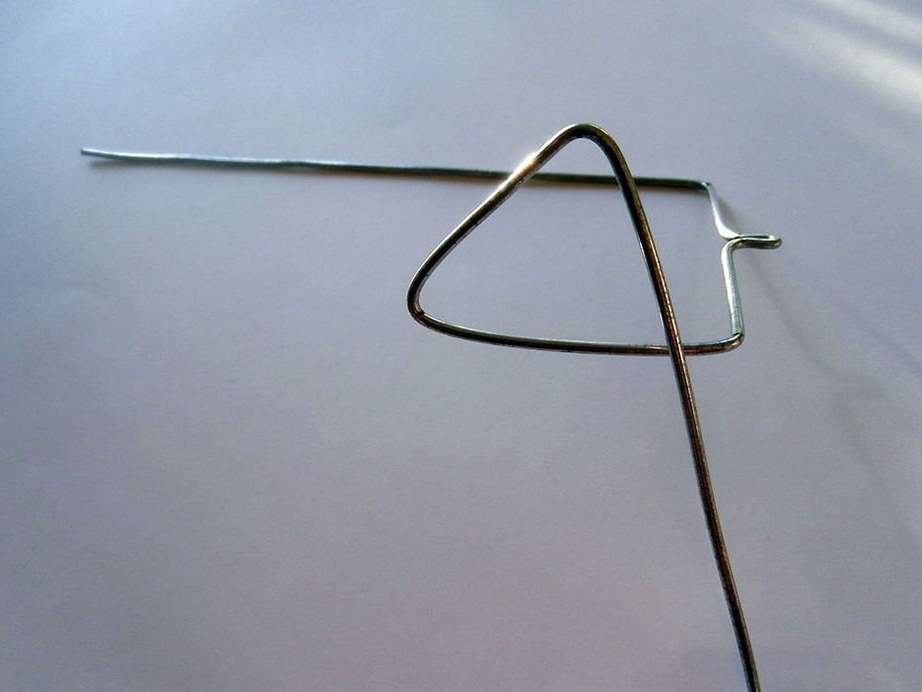
Krok 7: Tylne nogi
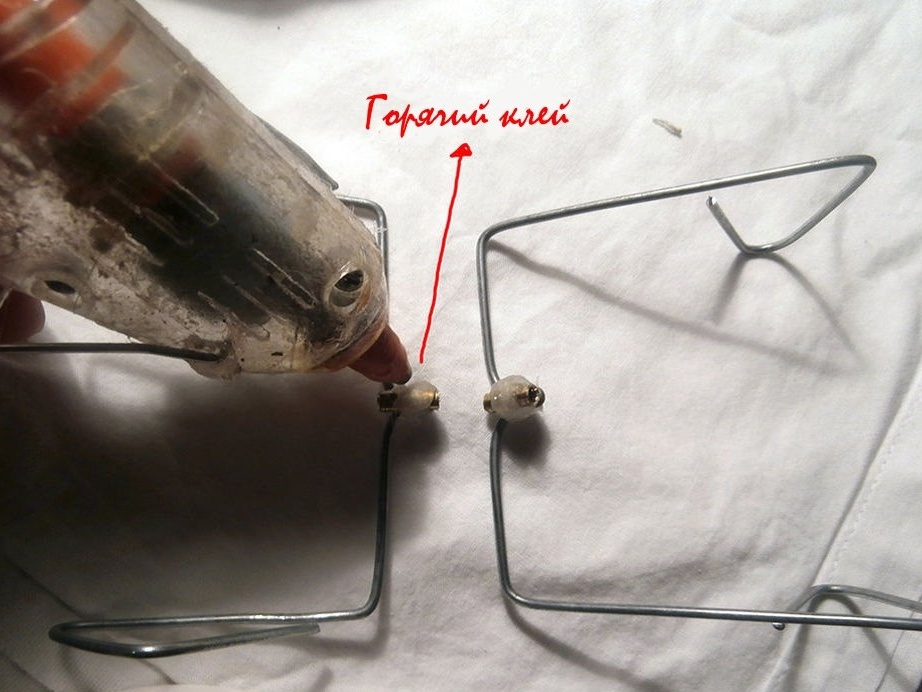
Krok 8: Mocowanie stóp
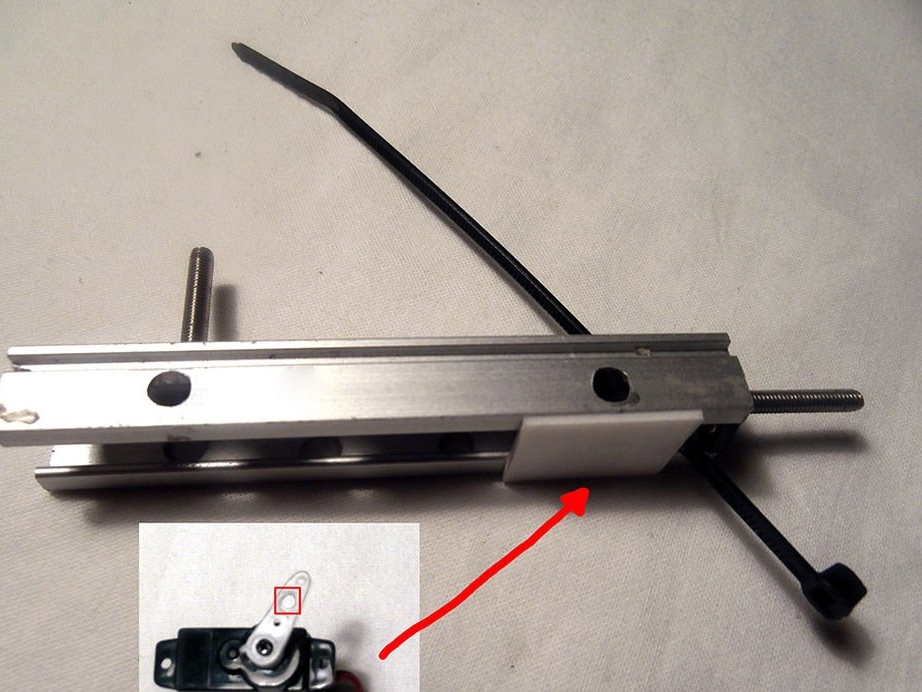
Krok 9: Sprzęgło
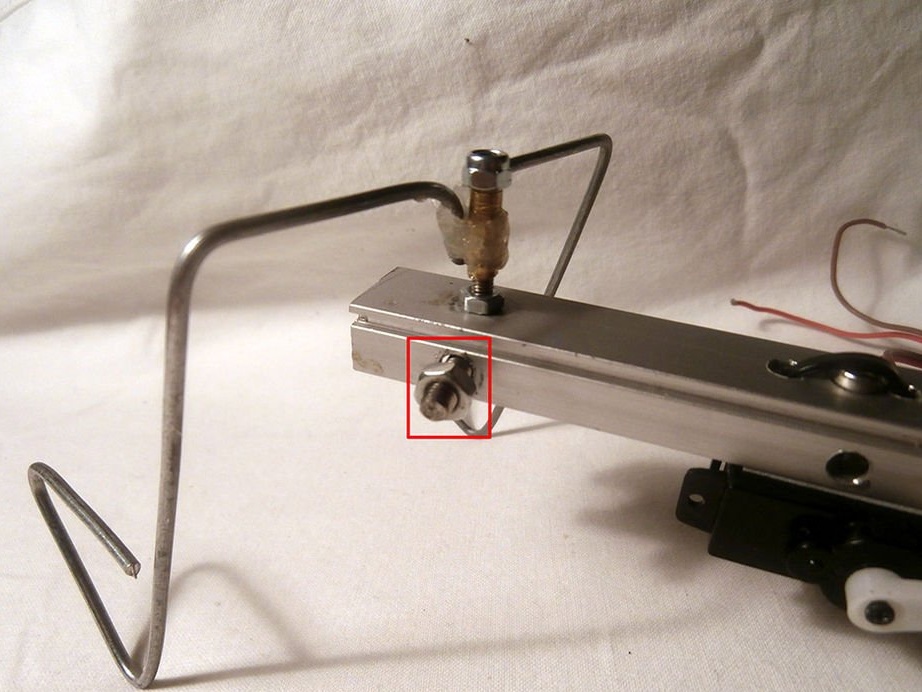
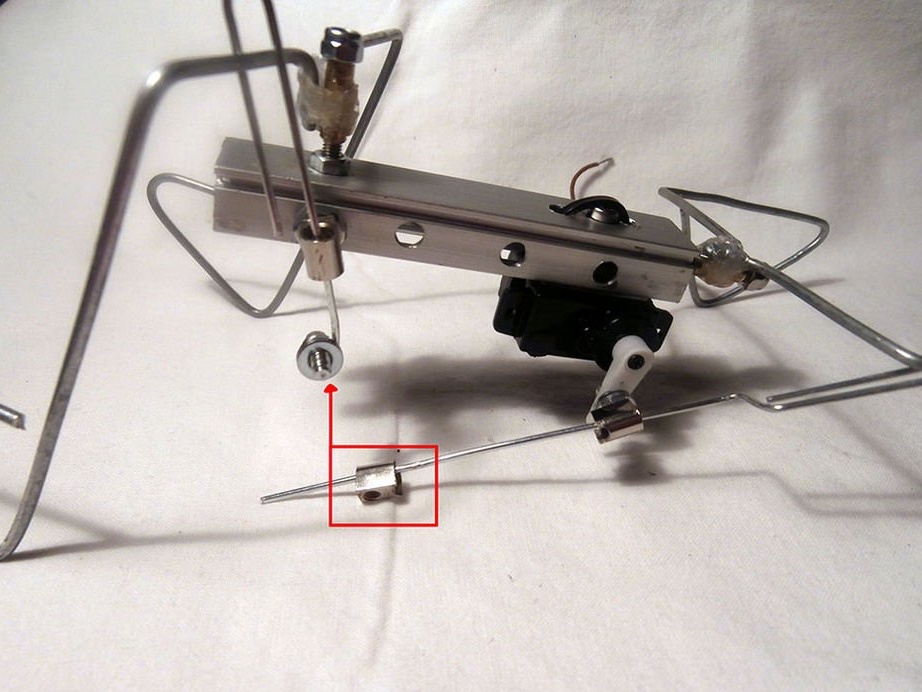
Krok 10: Montaż sprzęgła
Krok 11: ostatnie poprawki
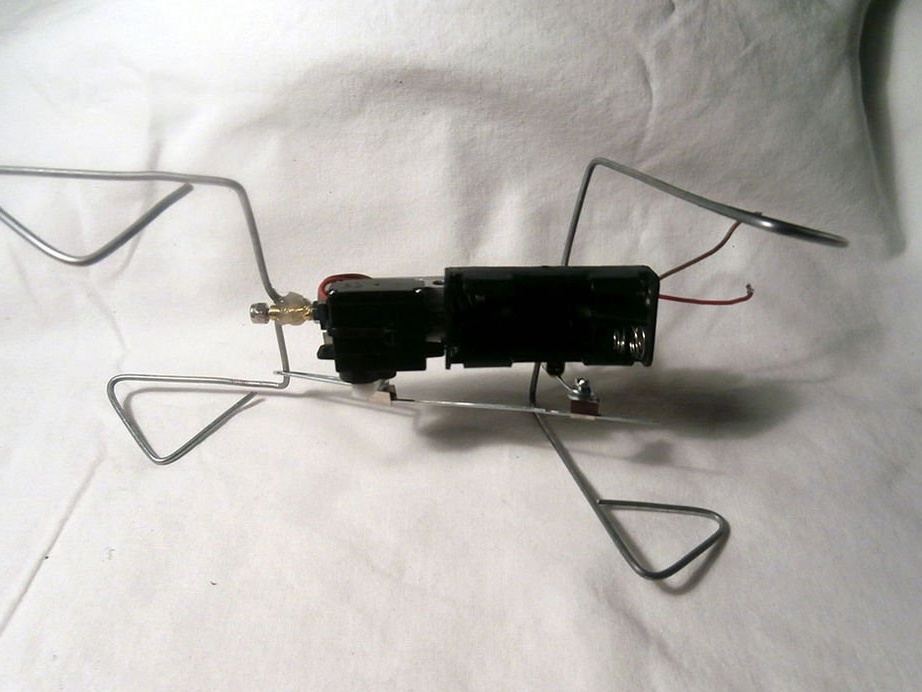
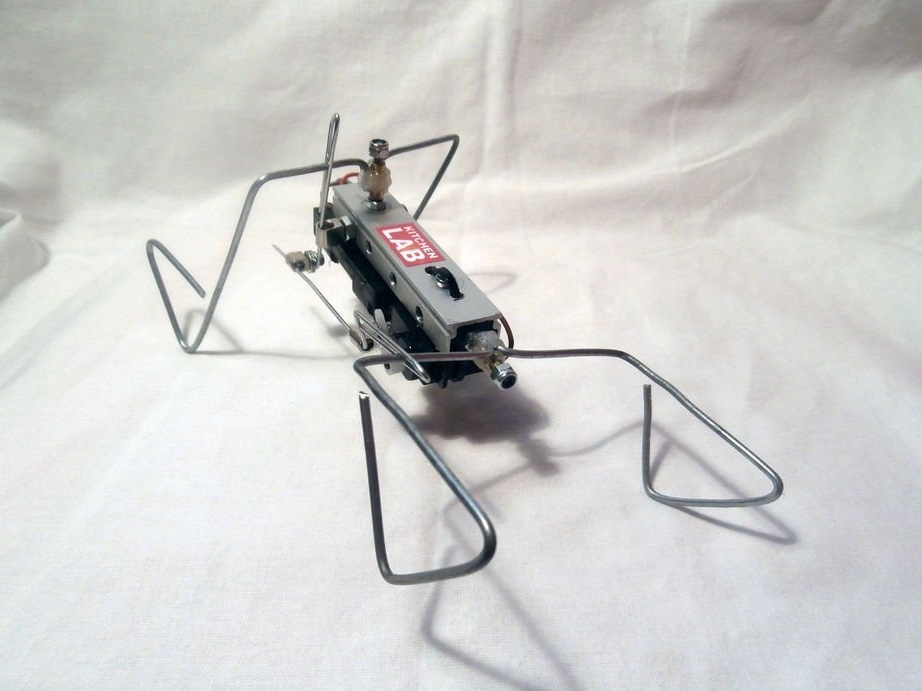
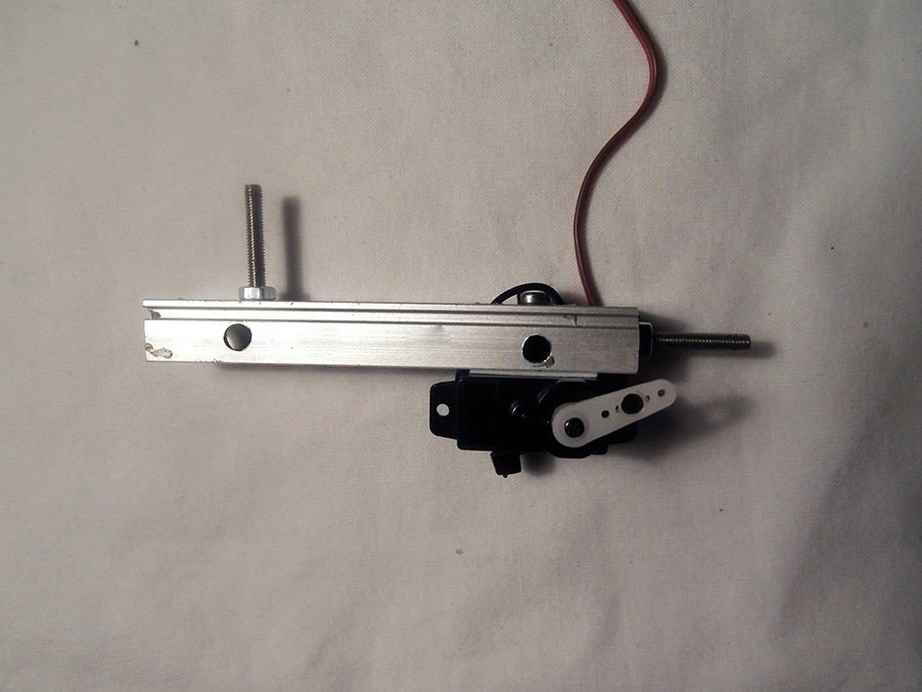
Na koniec po prostu podłącz serwomechanizm i baterie, i robot Sowa rozpocznie podróż po domu