
Niedawno zbudowałem dziesiątki robotów, w większości inspirowanych cudami robotyki BEAM. Jeśli nie znasz tej technologii, BEAM to specjalna metoda konstruowania robotów z naciskiem B - biologia, E - elektronika (elektronika), A- estetyka (estetyka) i M - mechanika (mechanika). To akronim BEAM. To, co odróżnia tę technologię od innych podejść, to wykorzystanie tylko energii promieniowania do odżywiania (głównie energii słonecznej), unieszkodliwianie różnych materiałów (ponowne użycie) i minimalizm. Chociaż przyjąłem te zasady, moje własne roboty nie były w duchu BEAM (były zasilane z baterii).
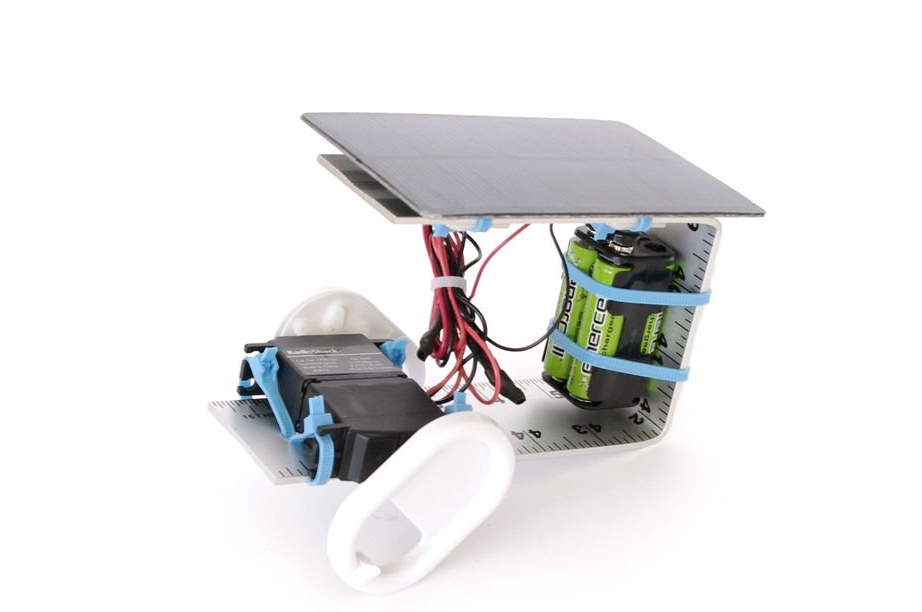
Ponieważ robotyka BEAM zainspirowała mnie poważnie, chciałem stworzyć robota zasilanego energią słoneczną. Ale zamiast robić robota BEAM, postanowiłem zintegrować panel słoneczny z robotem w moim zwykłym stylu. Zamiast w pełni zasilanego przez słońce postanowiłem wbudować akumulatory. Oznacza to, że mój robot może być zasilany albo z baterii, albo z panelu słonecznego, w zależności od tego, które źródło zasilania jest obecnie mocniejsze. Panel słoneczny ładuje również akumulatory, gdy uderza w nie światło słoneczne. Pozwala to robotowi poruszać się zarówno w świetle, jak iw cieniu.
Myślę, że to podejście z powodzeniem łączy dwa style i jest to interesujący eksperyment w budowie robotów.
Krok 1: Materiały
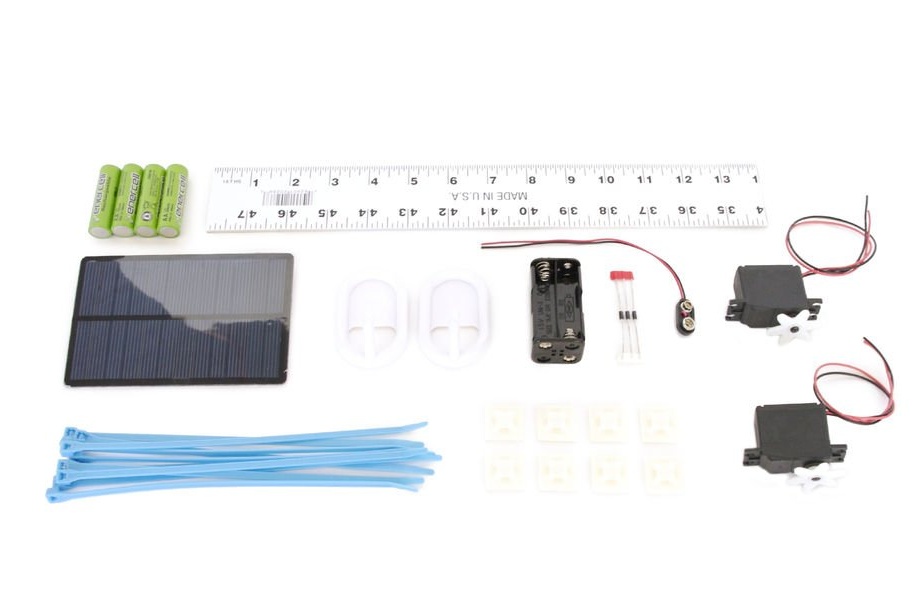
Będziesz potrzebował:
(x1) Panel słoneczny
(x2) Standardowe serwomotory
(x3) Diody Schottky'ego 1N5817 - odpowiednik NTE578
(x1) bateria 9 V.
(x8) Akumulatory AA
(x1) 8 x akumulator AA
(x12) Podstawa do zacisków
(x1) Linijka (30-50 cm)
(x2) Ścienne haczyki samoprzylepne
(x1) Plastikowe zaciski
(x1) Rurki termokurczliwe
Krok 2: Zmodyfikuj serwomechanizm

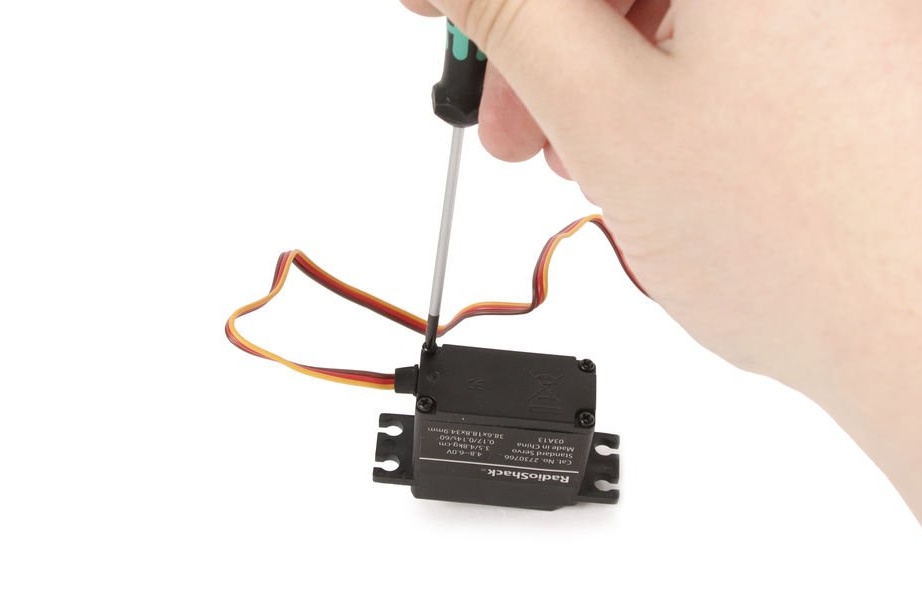
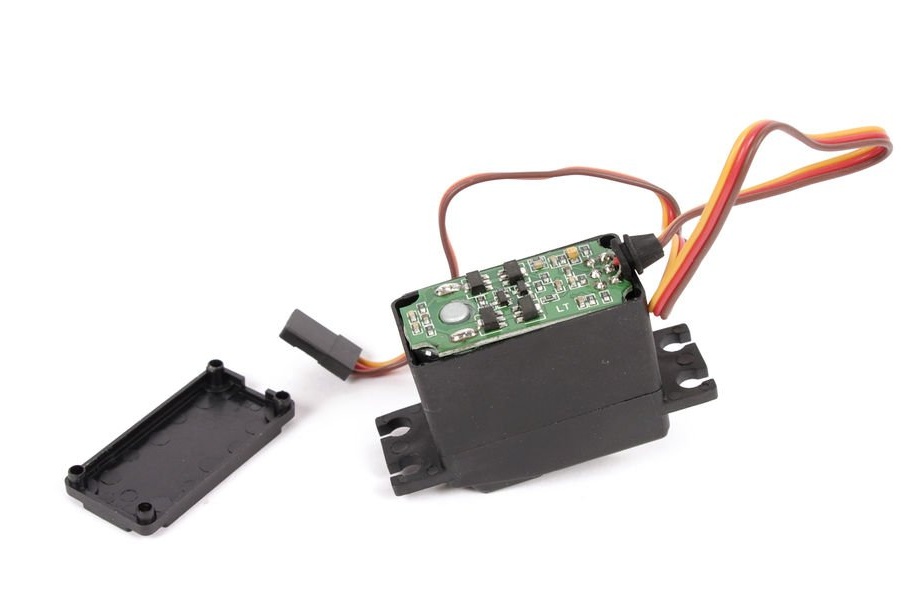
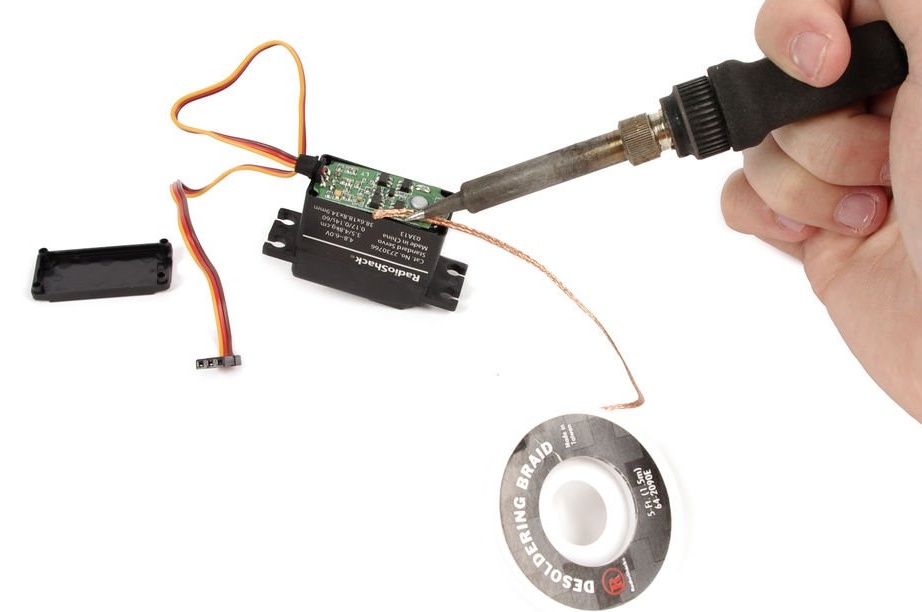
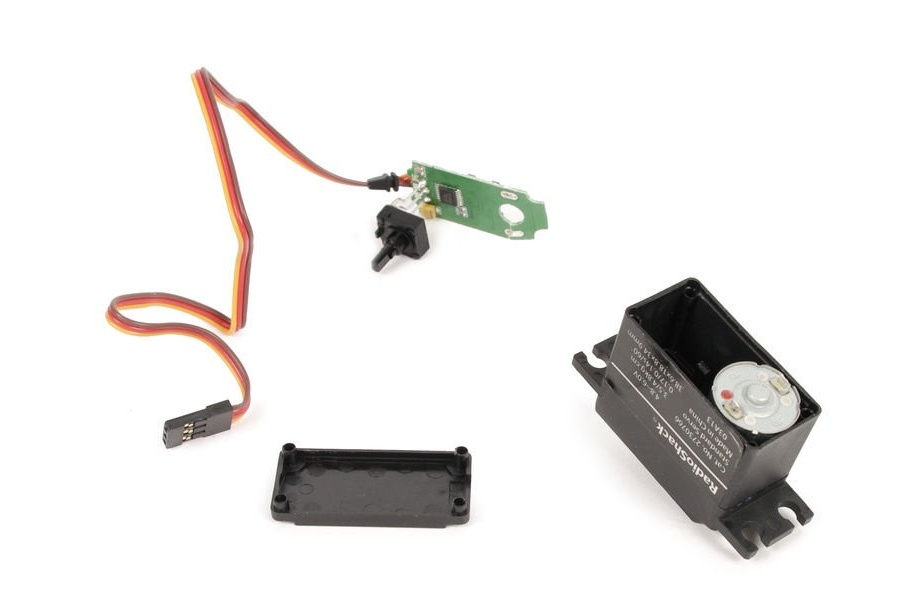




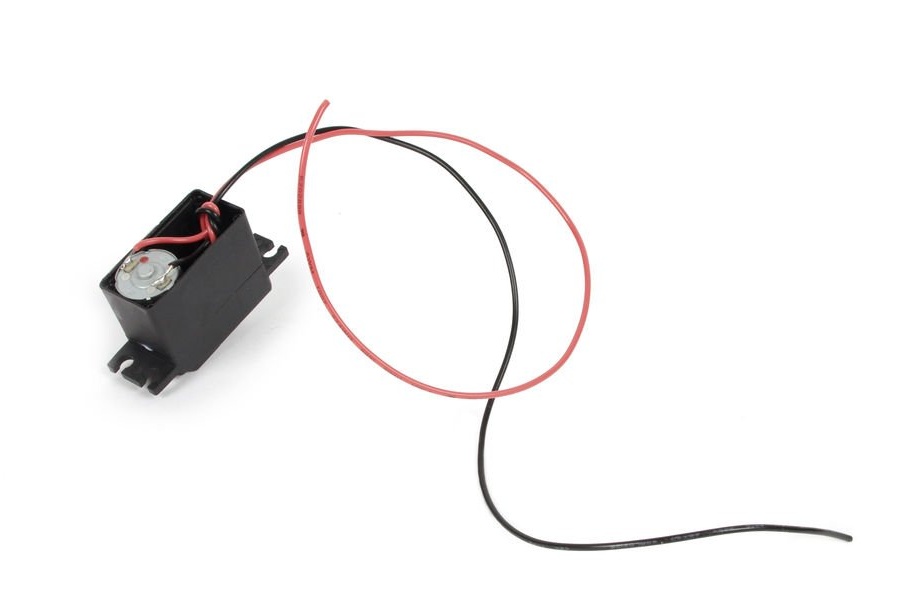
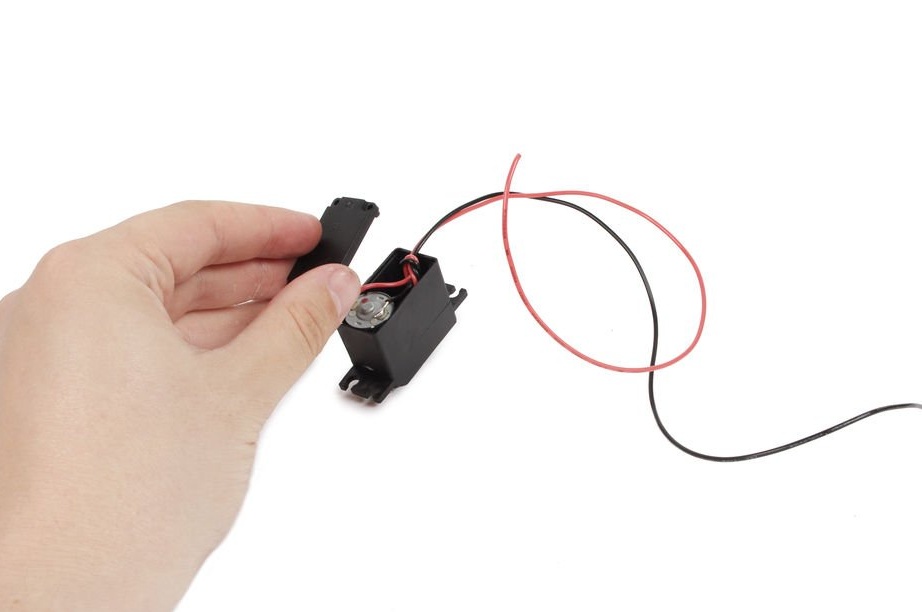

Otwórz obudowę serwomechanizmu, odkręcając 4 śruby na dolnym panelu. Rozpakuj płytkę wewnątrz i podłącz czerwone i czarne przewody do każdego zacisku napędu.
Otwórz napęd i znajdź koło zębate z małą plastikową nasadką, która zapobiega ciągłemu obrotowi. Odetnij nasadkę od koła zębatego.
Krok 3: Ćwicz
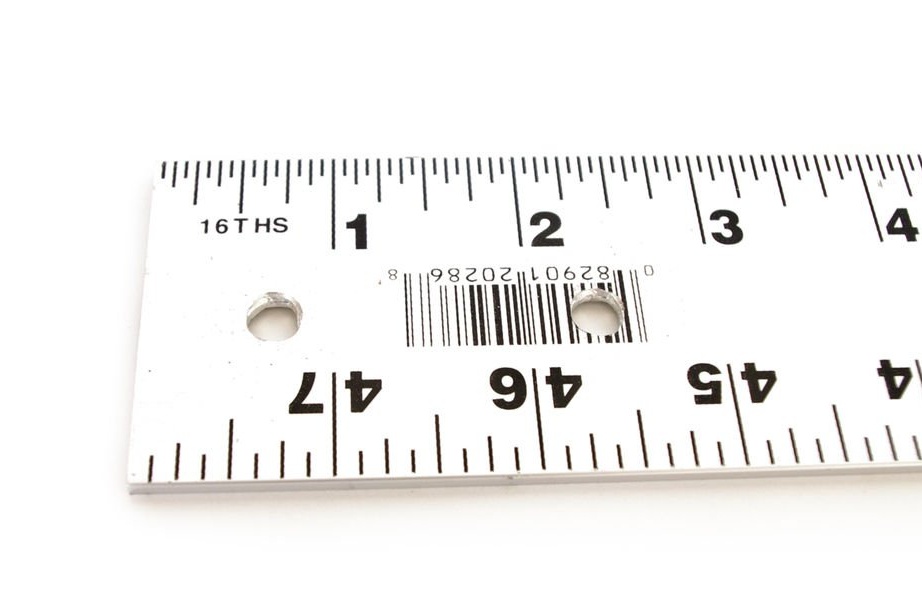


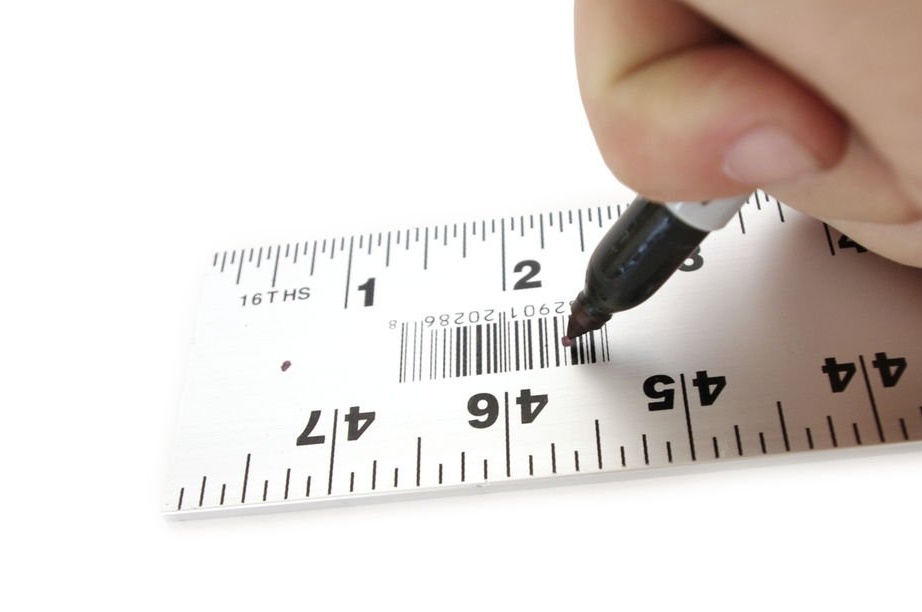
Wywierć ćwierć cala (6,3 mm) otwór pośrodku linijki, około 15 mm od krótkiej krawędzi. Wywierć drugi otwór około 60 mm od tej samej krawędzi.
Krok 4: Wygnij się

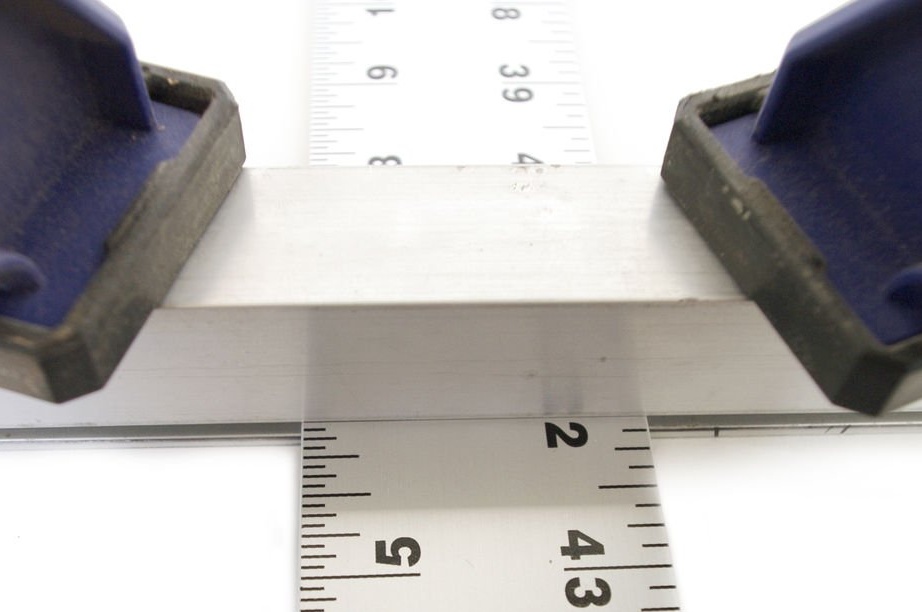
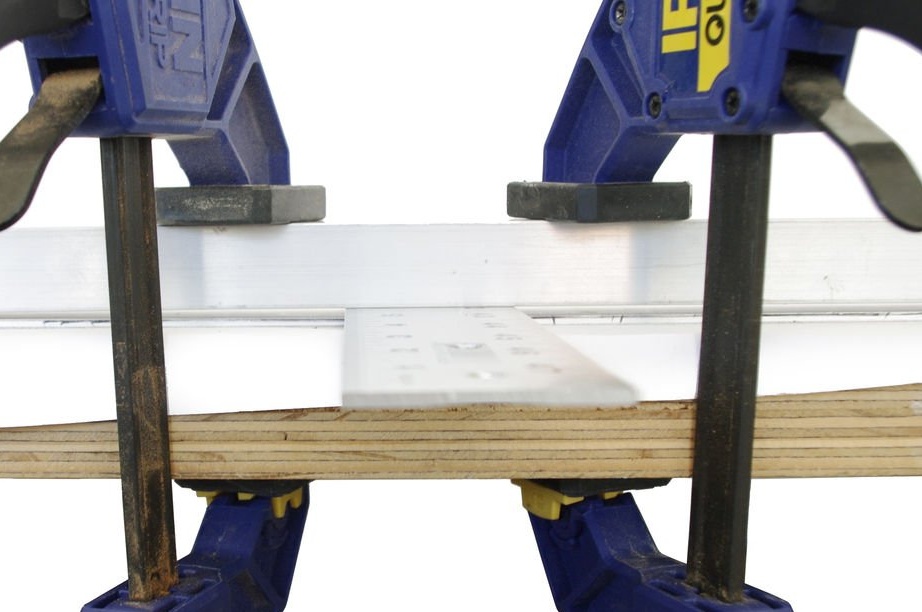

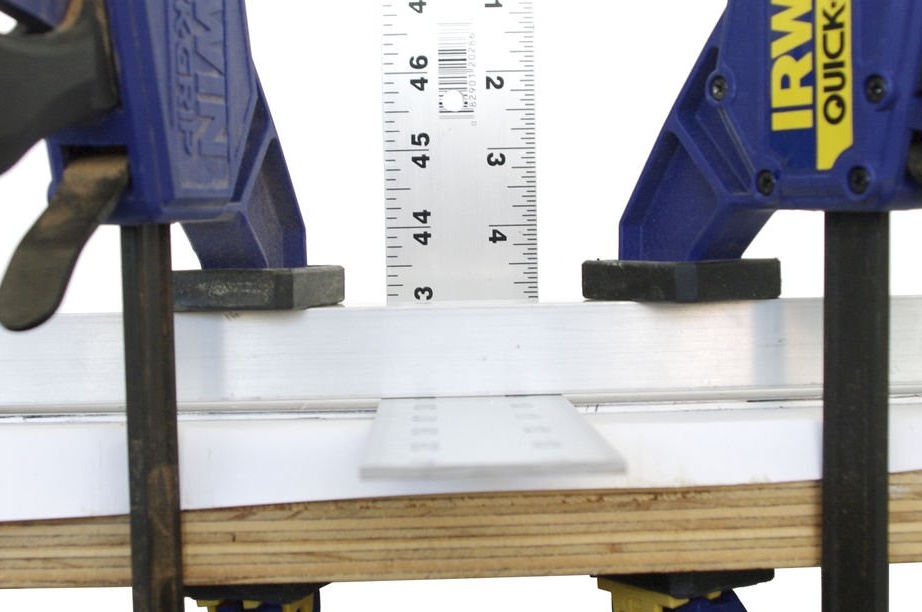

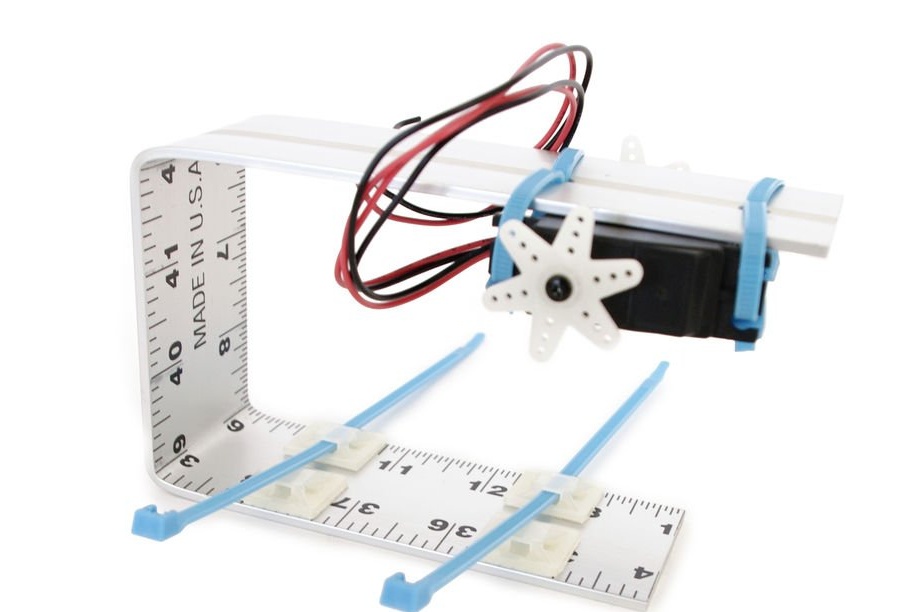
Używając imadła lub dwóch metalowych płyt zamocowanych na krawędzi stołu, zegnij linijkę pod kątem 90 stopni w odległości 15 cm od krawędzi, w której wywiercono otwory.
Wykonaj to samo zagięcie pod kątem 90 stopni w odległości 15 cm od drugiej krawędzi. Otrzymasz postać w formie litery P.
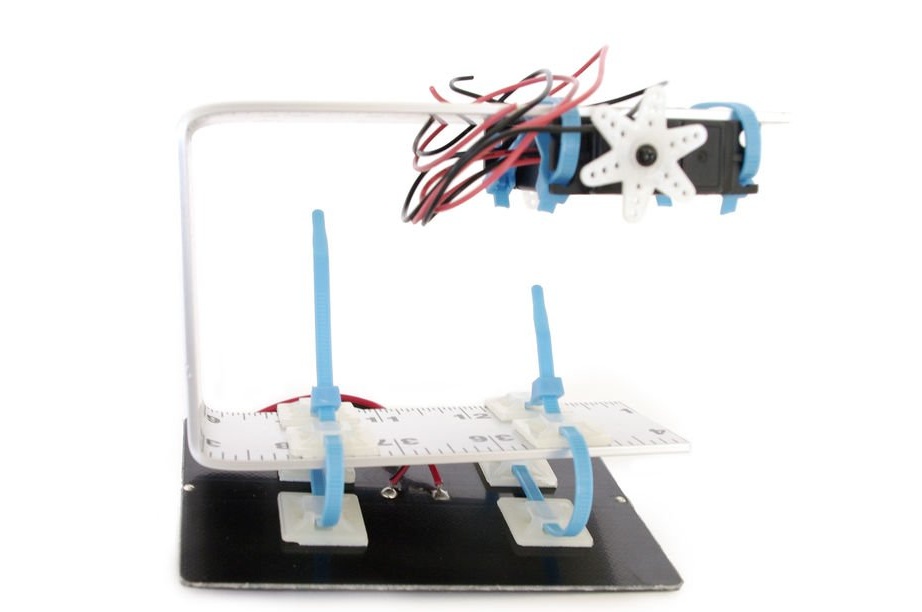
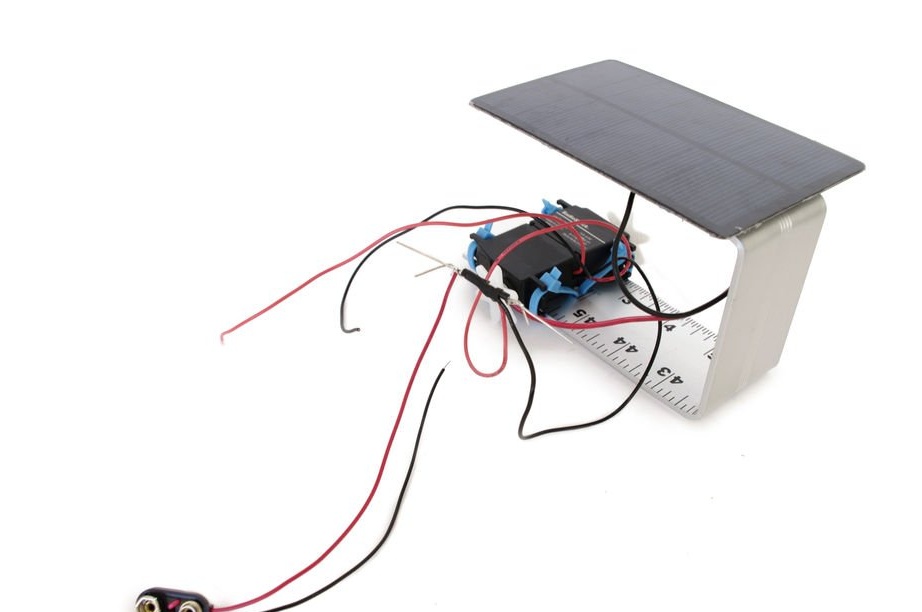
Krok 5: Połączenie
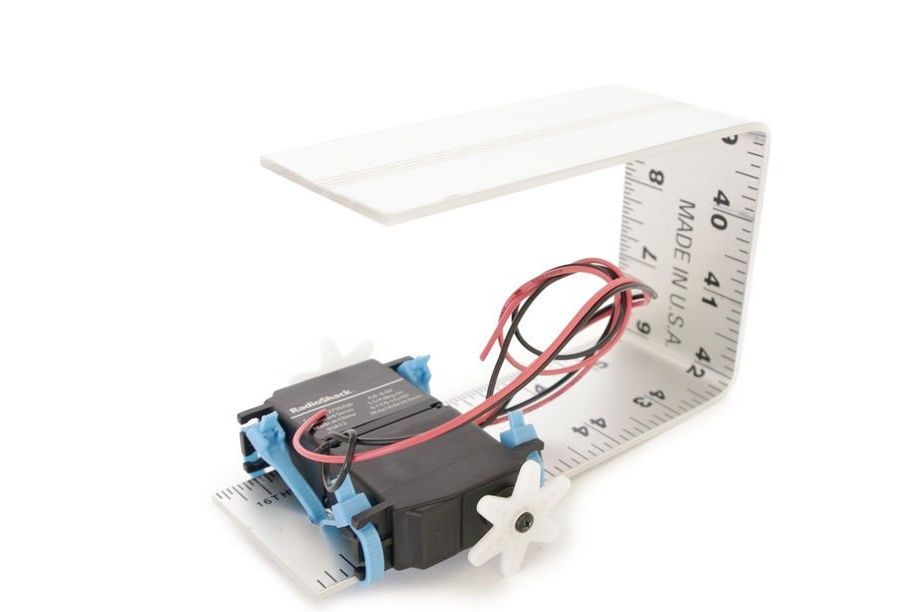

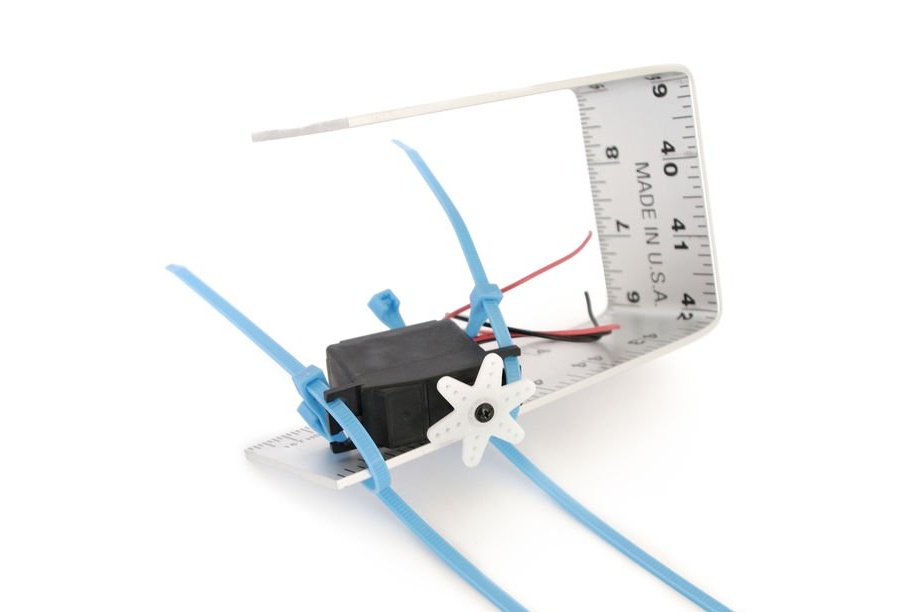
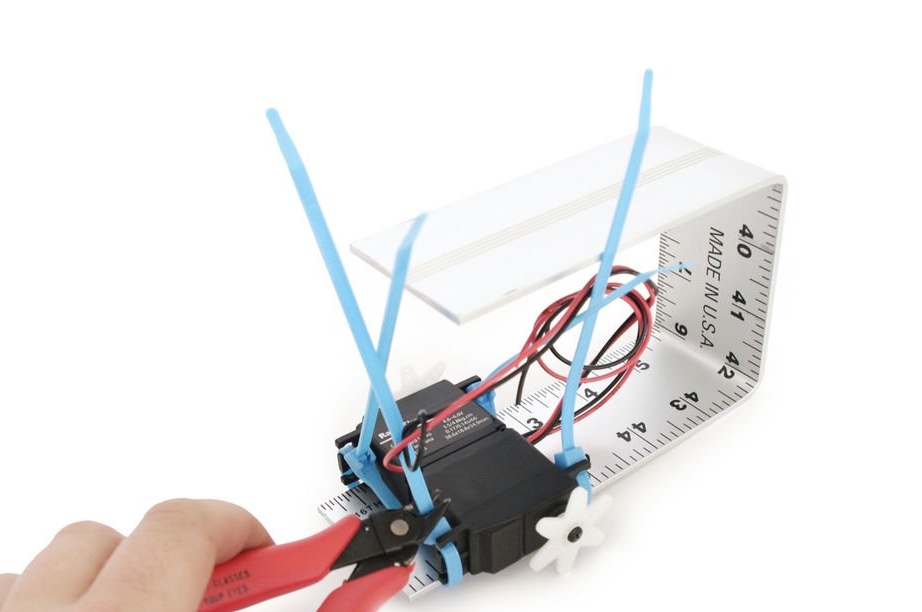
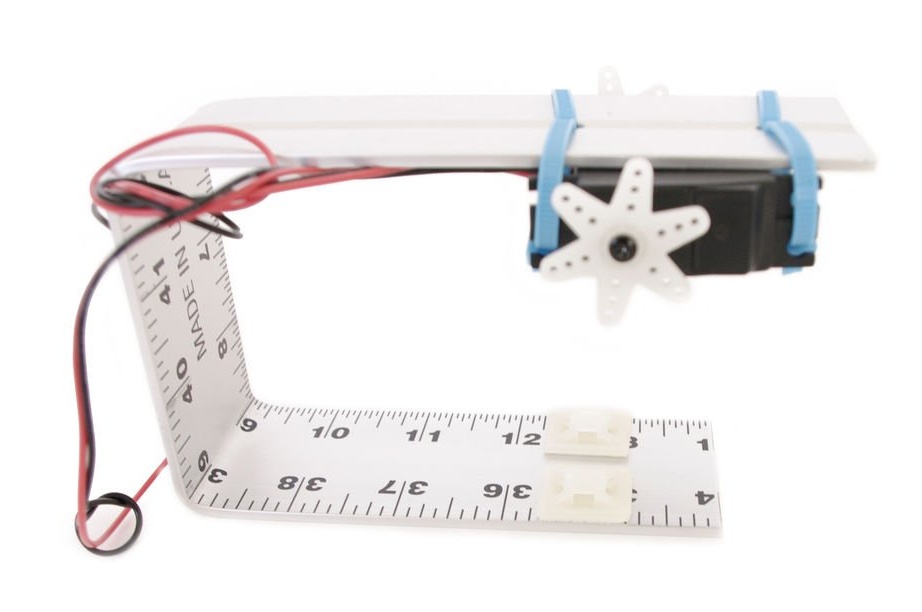
Konieczne jest przymocowanie serwomechanizmów do linii za pomocą plastikowych zacisków, przez wywiercone otwory. Serwosilniki muszą siedzieć do siebie plecami.
Krok 6: Podstawa do zacisków
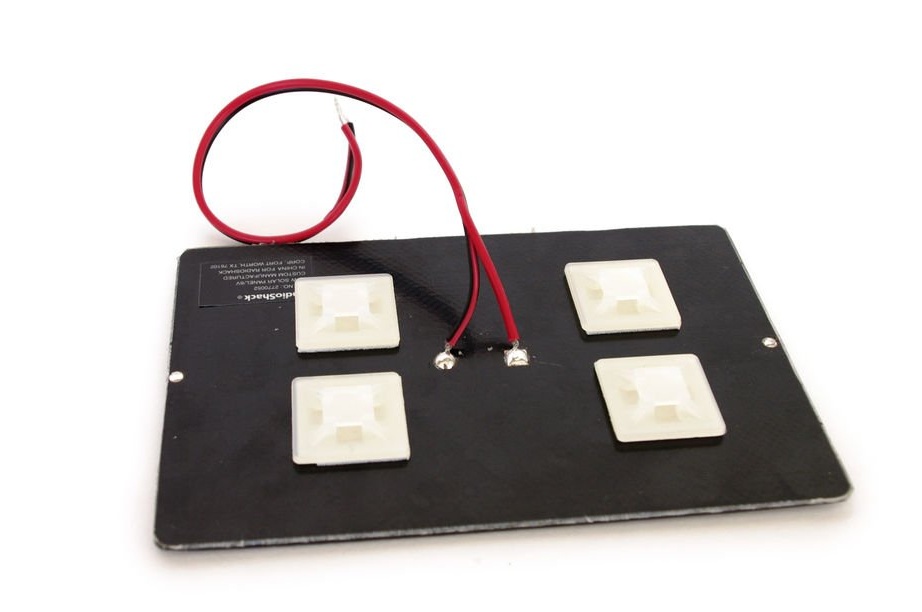

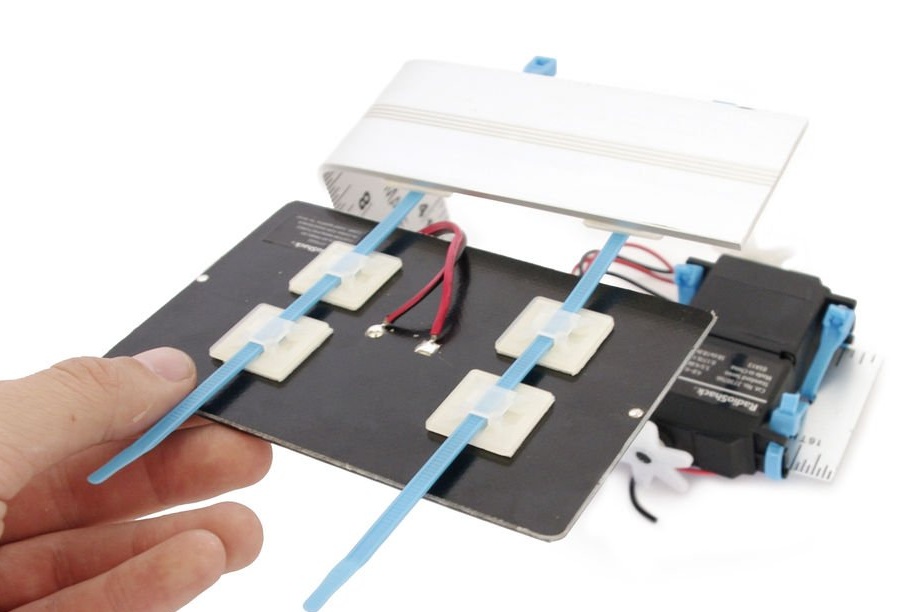
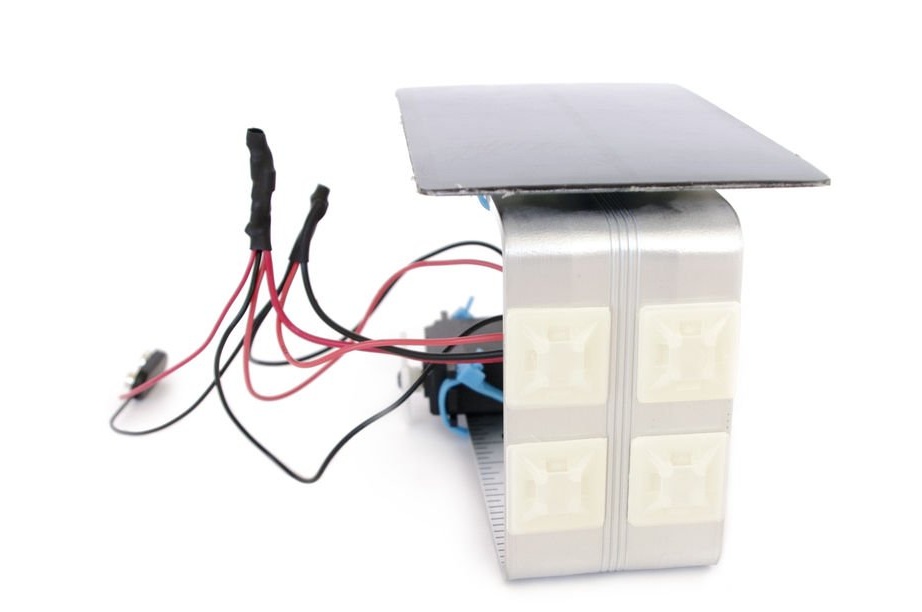
Umieść dwie pary podstaw zaciskowych obok siebie z tyłu panelu słonecznego. Ważne jest, aby kanały każdej pary były na tej samej linii.
Krok 7: Więcej powodów
Przymocuj jeszcze dwie podstawy do wnętrza U-baru, po stronie przeciwnej do serwomechanizmów.
Krok 8: Połączenie
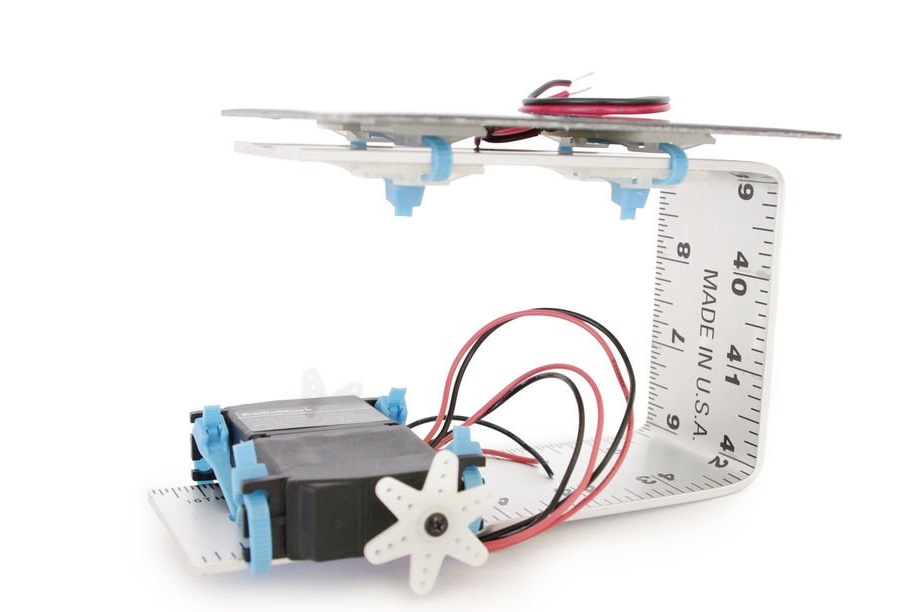
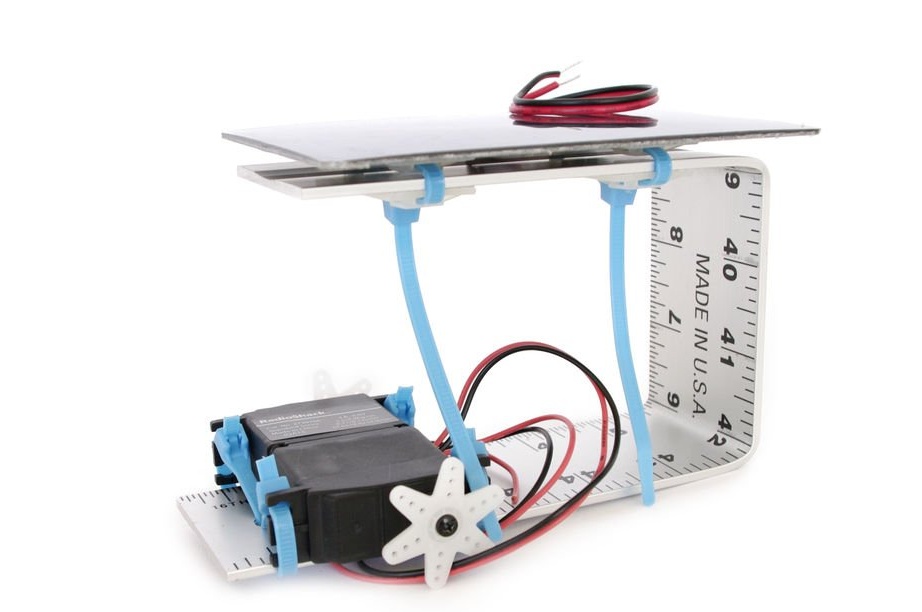
Przymocuj panel słoneczny za pomocą obejm poprzez stałe podstawy.
Krok 9: Włóż baterie


Włóż baterie do zestawu baterii.
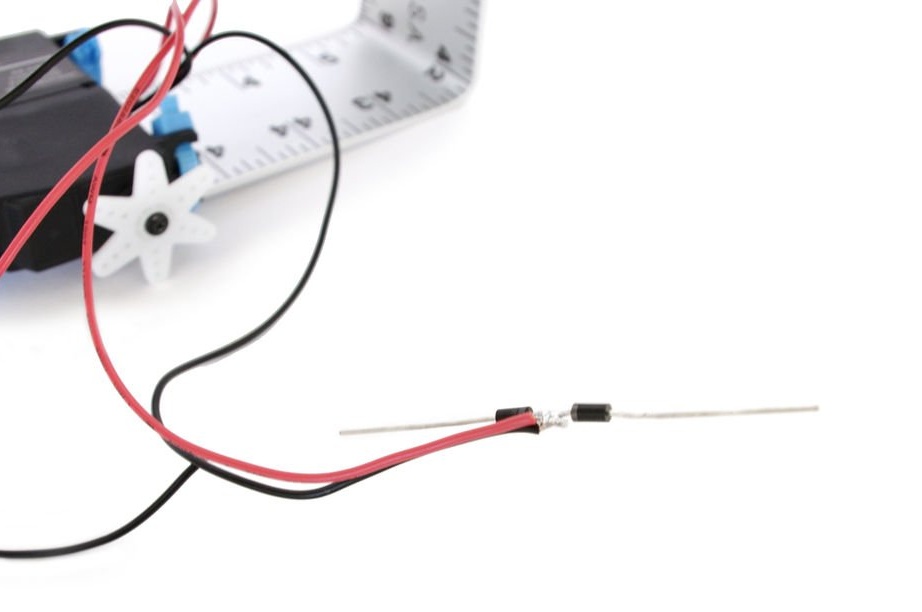
Krok 10: Diody

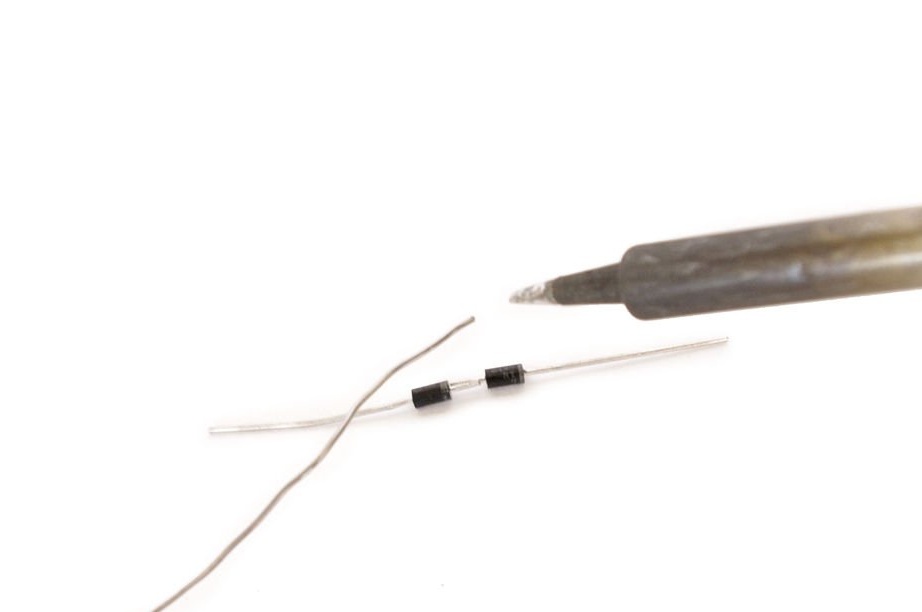
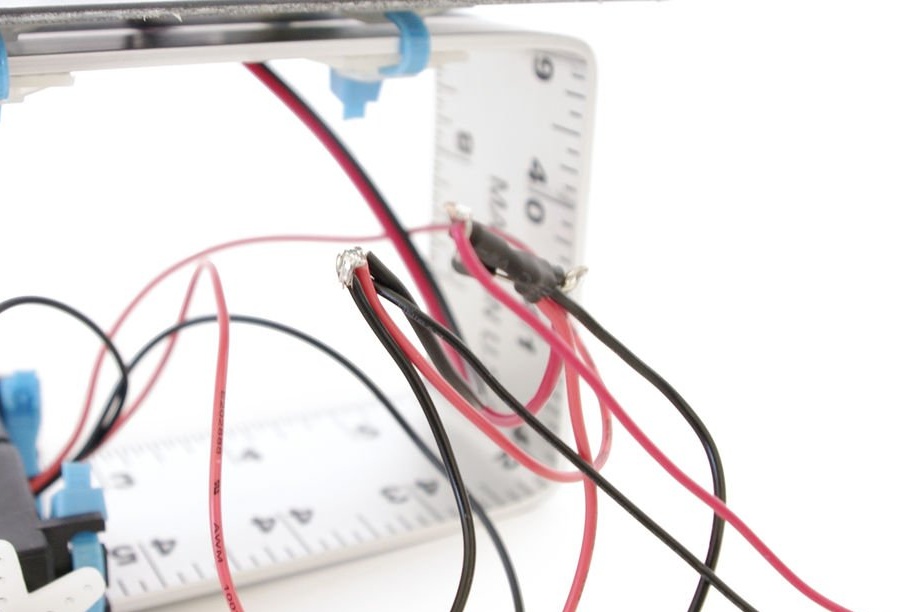
Przylutuj dwie diody razem z katodami (bok diod z szyną).
Krok 11: montaż łańcucha
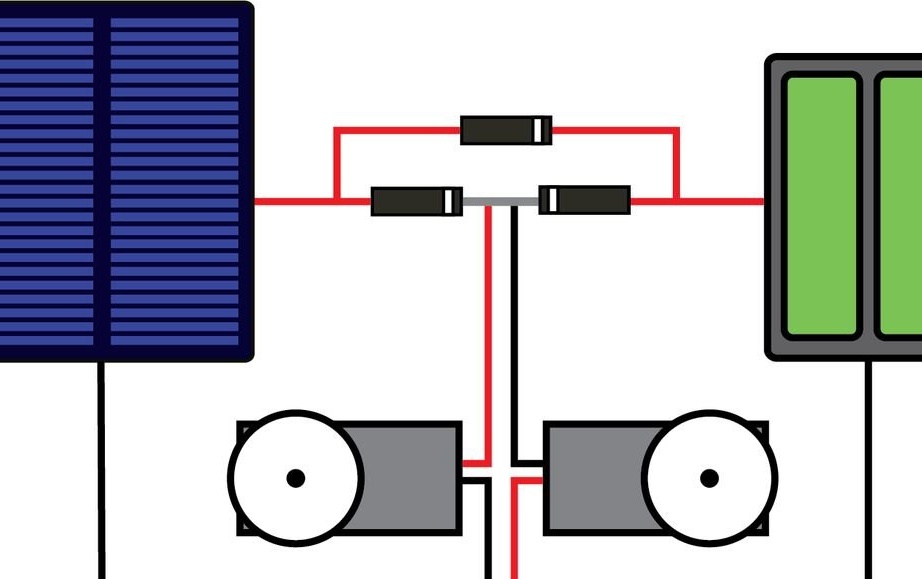
Obwód tego robota oparty jest na prostym obwodzie ładowania słonecznego Davida Cooka. Obwód zawiera dwie diody Schottky'ego połączone katodą z katodą, jedną diodę podłączoną do panelu słonecznego i jedną z baterii. Ta konfiguracja pozwala na zasilanie zarówno bateriami, jak i panelem słonecznym, w zależności od warunków.
Ponieważ akumulatory można ładować, trzecia dioda Schottky'ego jest podłączona bezpośrednio z panelu słonecznego do przedziału akumulatorów w celu naładowania akumulatorów od słońca.
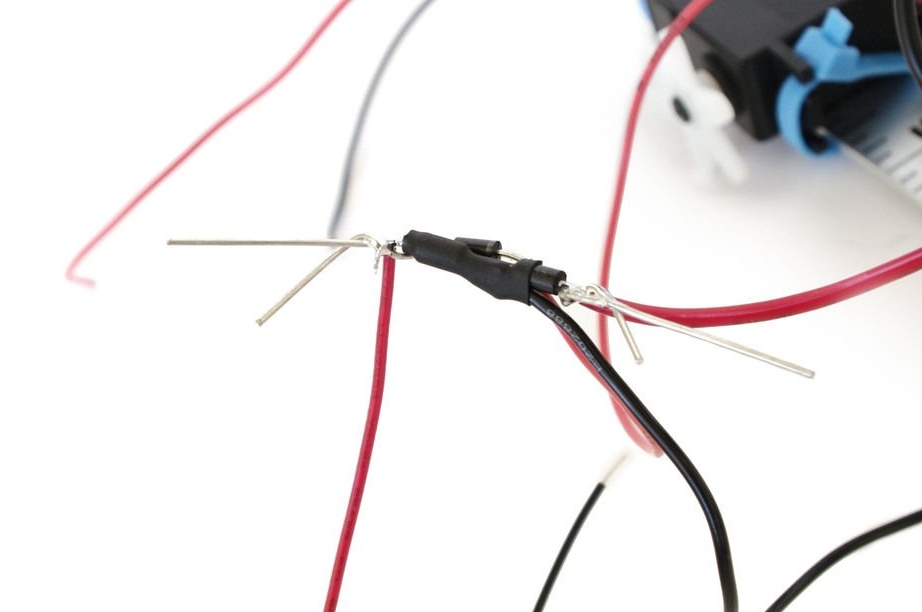
Aby połączyć to wszystko, podłącz czerwony przewód z jednego serwomechanizmu i czarny przewód z drugiego do środkowego punktu połączenia katodowego.
Następnie podłącz czerwony przewód od zacisku akumulatora do anody jednej z diod Schottky'ego. Podłącz czerwony przewód z panelu słonecznego do anody na innej diodzie.
Teraz przylutuj anodę trzeciej diody do czerwonego drutu, który jest podłączony do panelu słonecznego, a katodę do czerwonego drutu z zacisku akumulatora.
Owiń wszystkie przewody rurką termokurczliwą, aby zabezpieczyć obwód przed zwarciem.
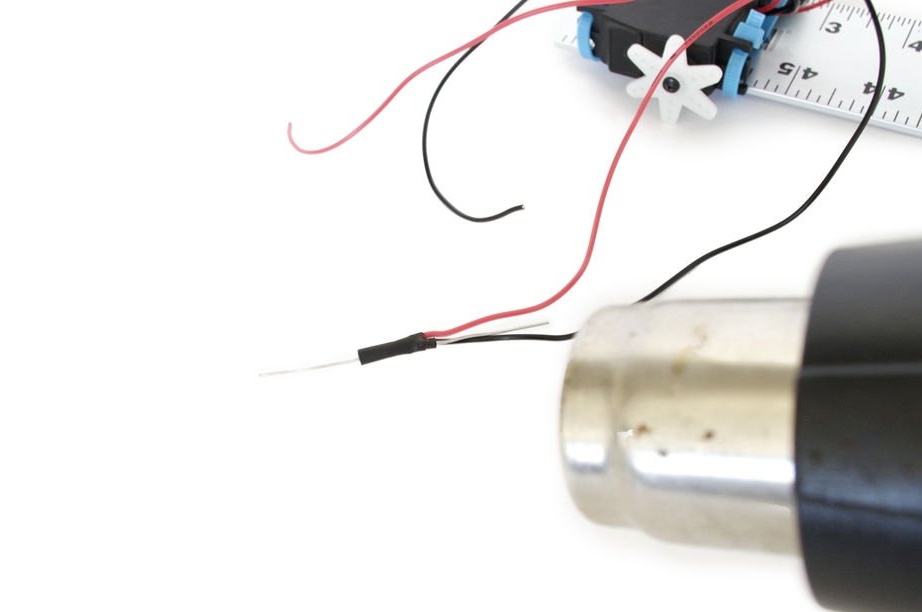
Krok 12: Więcej drutów
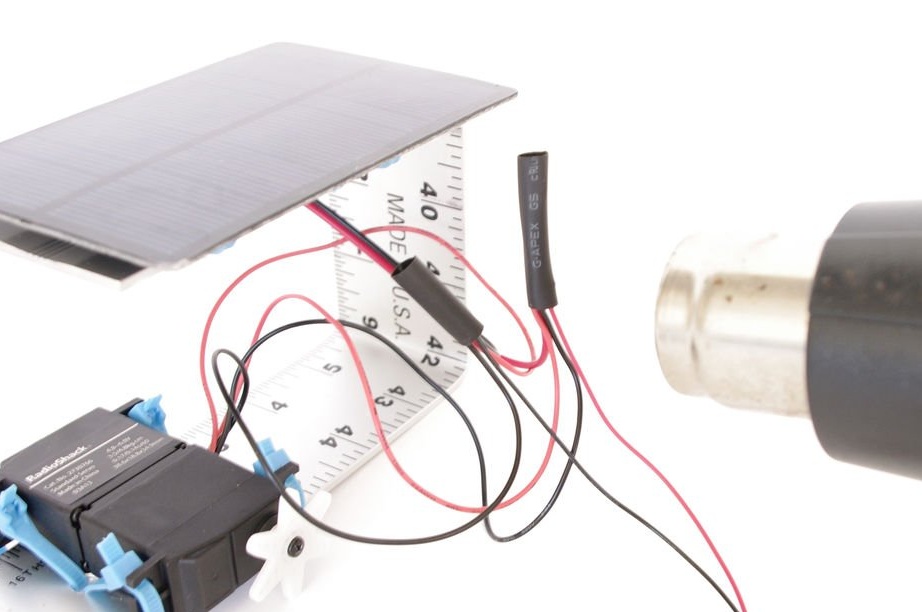
Przylutuj razem wszystkie czarne przewody i pozostałe wolne czerwone przewody z serwomechanizmów.
Zdobądź dwa połączenia lutowane; jeden dla mocy, a drugi dla uziemienia. Owiń oba te złącza rurką termokurczliwą lub taśmą elektryczną.
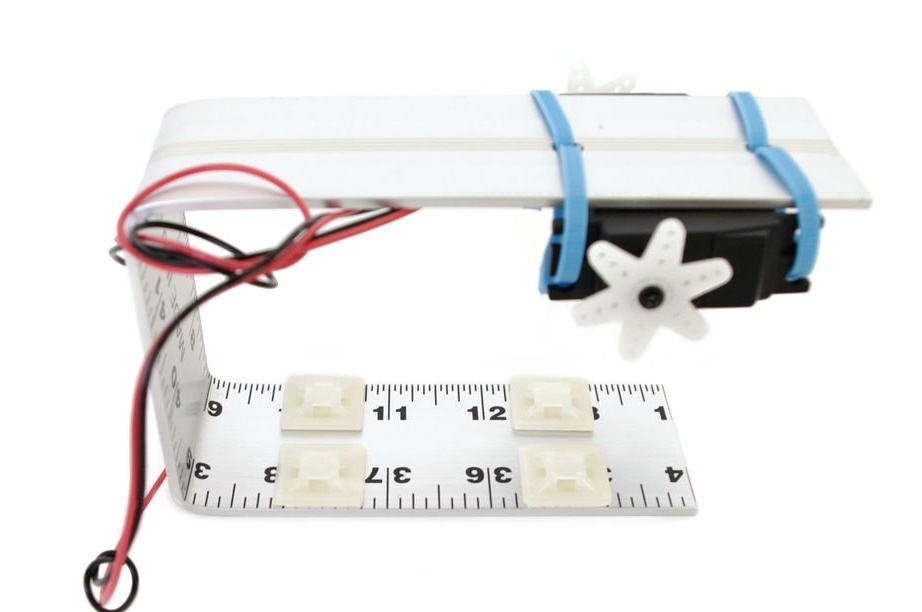
Krok 13: I kilka innych powodów dla zacisków
Przymocuj dwie pary podstaw do spodniej strony zakrzywionej linijki w kształcie litery U.
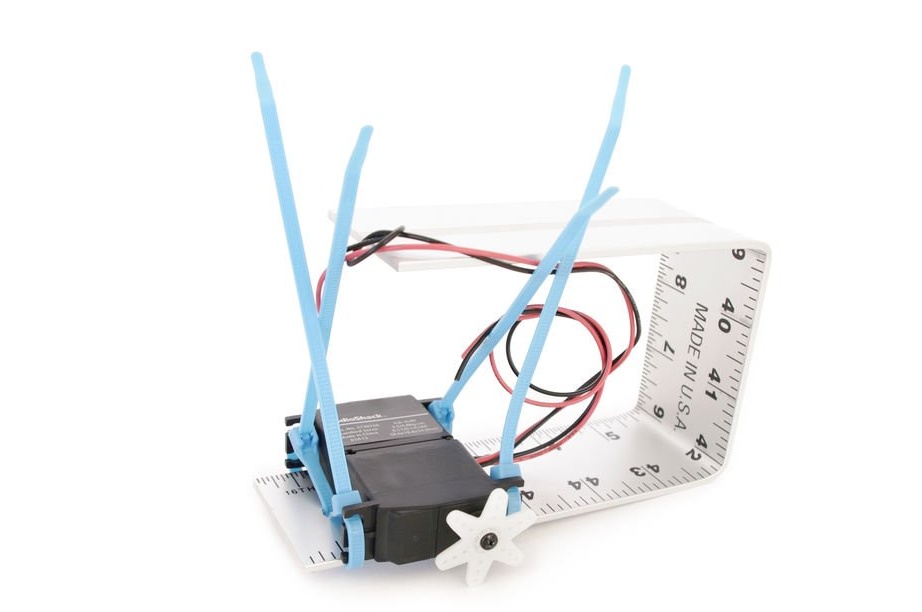
Krok 14: Zabezpieczanie baterii
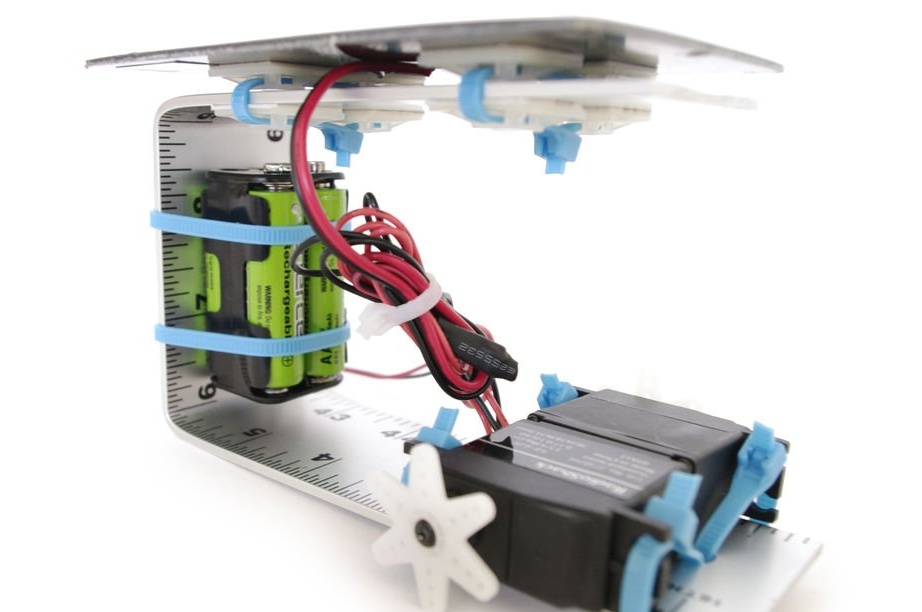
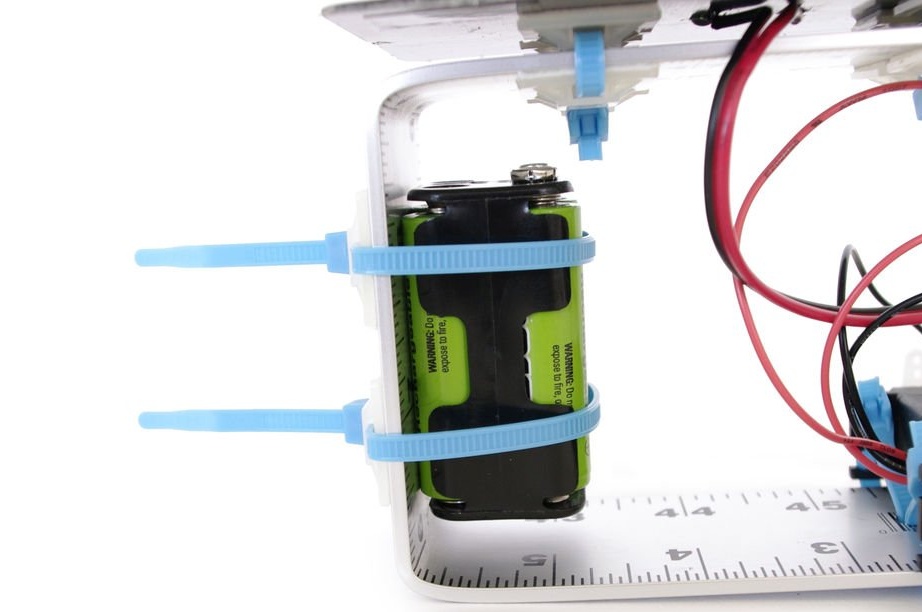
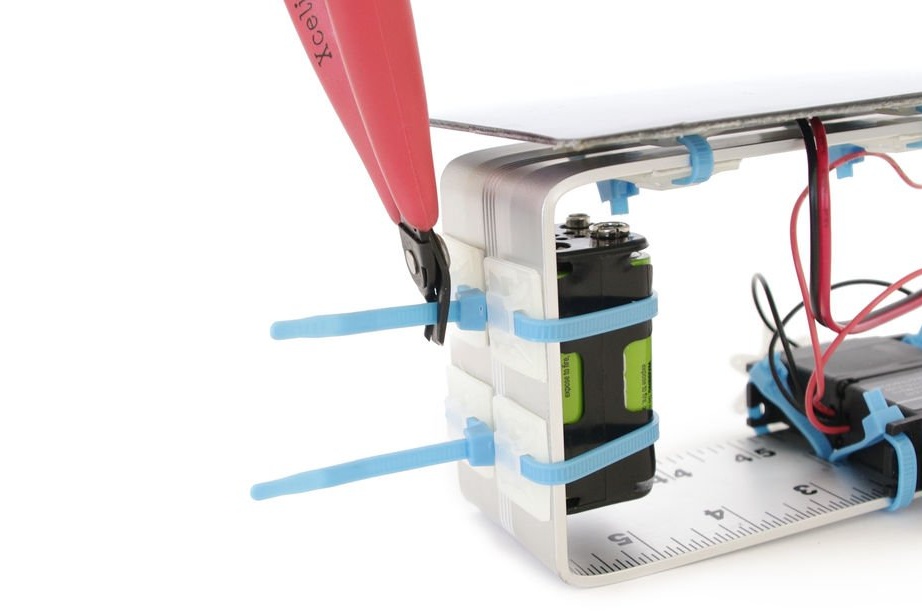
Zamocuj akumulatory za pomocą zacisków wewnątrz linijki w kształcie litery U, aby były pewnie i nieruchomo na miejscu.
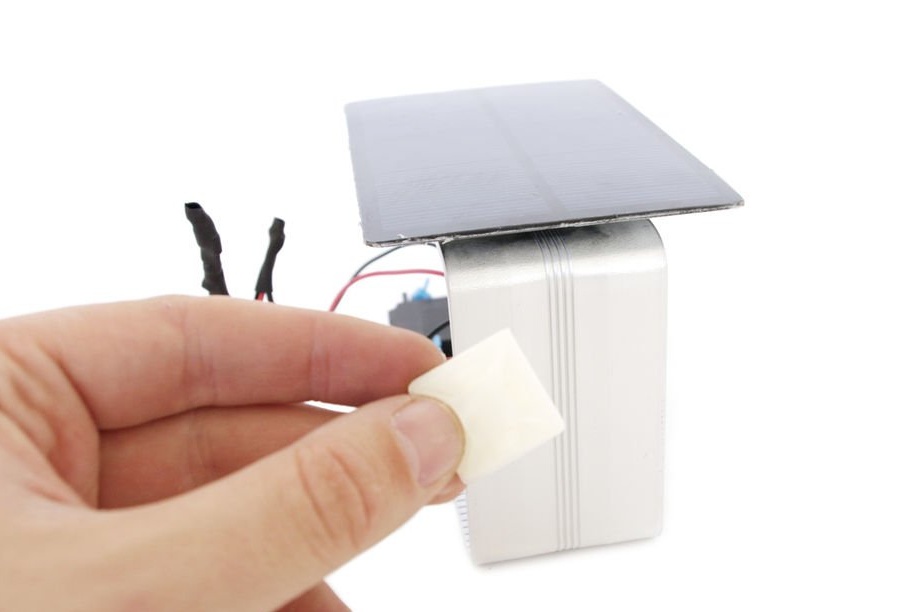
Krok 15: Przycinanie


Przetnij haczyki na plastikowych uchwytach ściennych.
Krok 16: Koła
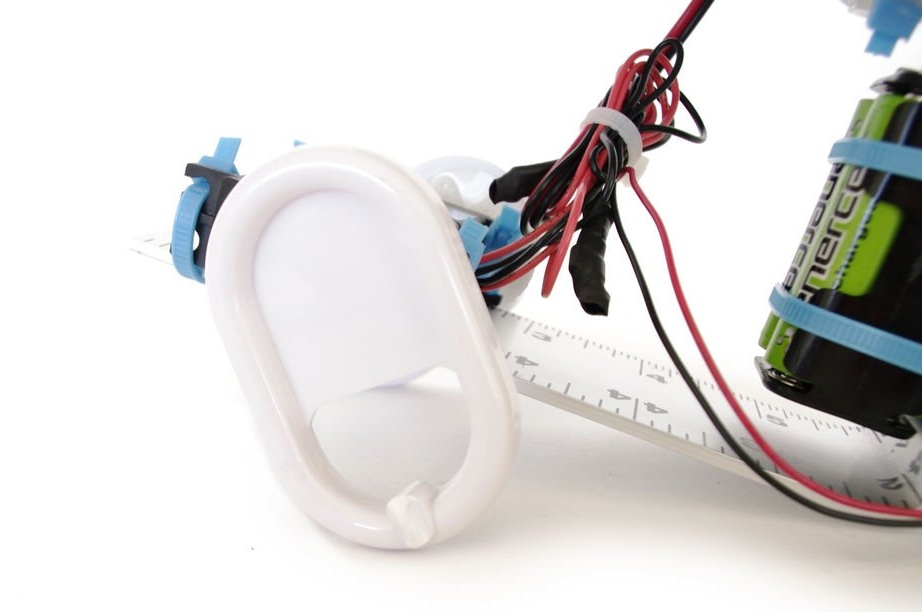
Przyklej mocowania ścienne do zewnętrznych kół zębatych serwomechanizmów (będzie to coś w rodzaju kół).
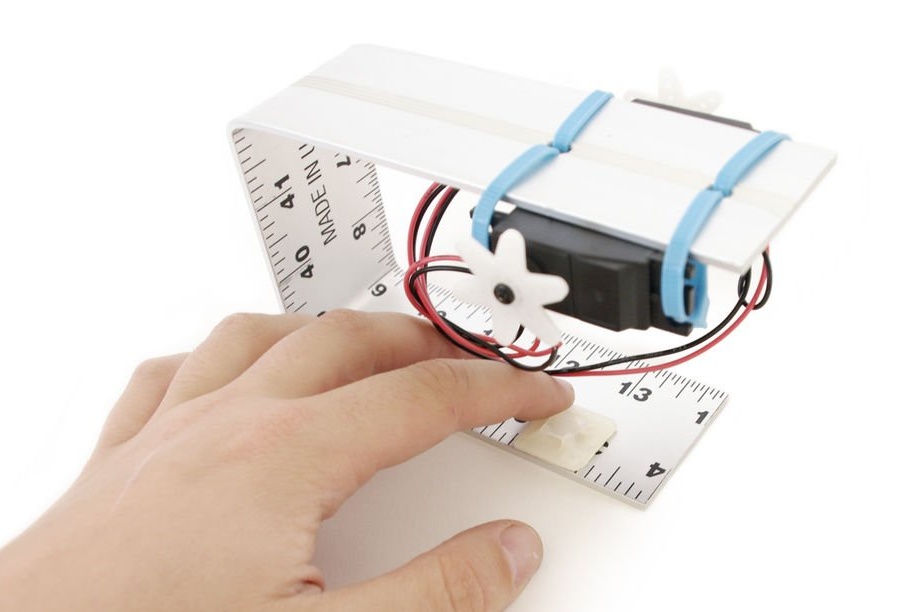
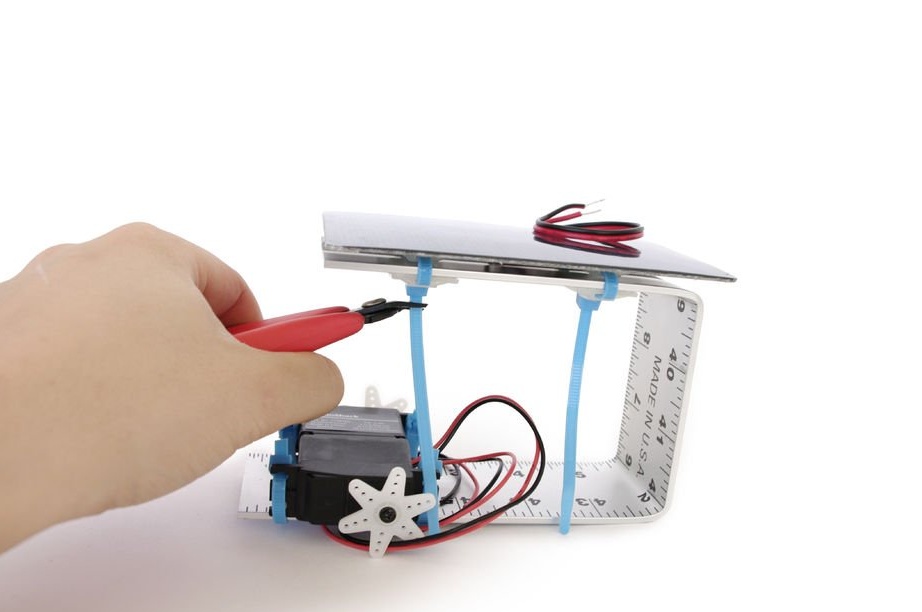
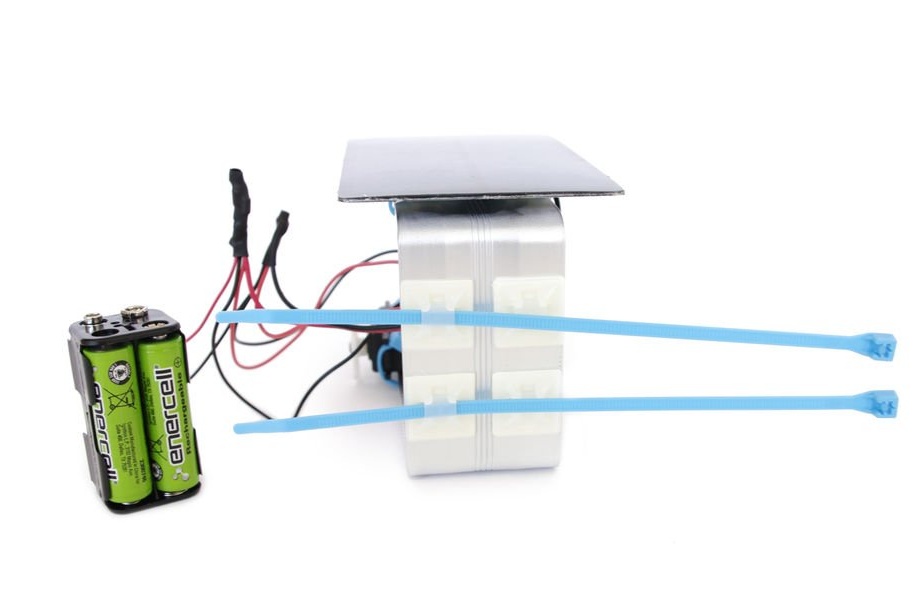
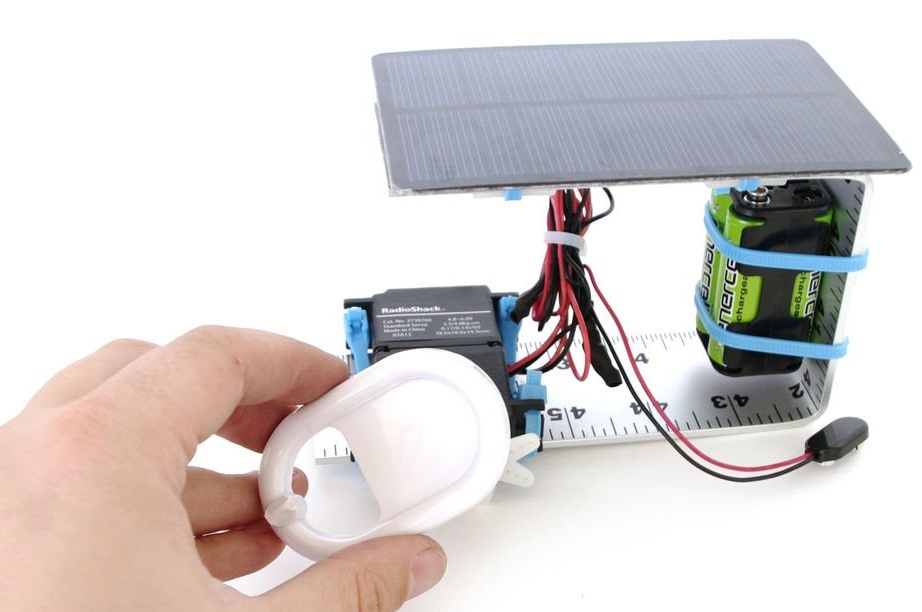
Krok 17: Włącz!

Podłącz przewód do akumulatora, a robot zacznie się poruszać.