

Jeśli robisz swój pierwszy kwadrokopter i nie masz drukarki 3D, ta instrukcja jest dla Ciebie. Na drodze do zbudowania tego kwadrokoptera mistrz wykonał siedem modeli, a każdy z nich miał swoje własne, poważne wady. Wreszcie, dzięki próbom i błędom, był w stanie sprawić, że to zadziała model.
Narzędzia i materiały:
- Sklejka o grubości 7 mm i rozmiarze około 30 x 22 cm;
- Aluminiowa rura profilowa 25 * 25 mm - 1 metr;
-Zolenta;
- łączniki;
-Zatrzask wątku;
- Akcesoria do lutowania;



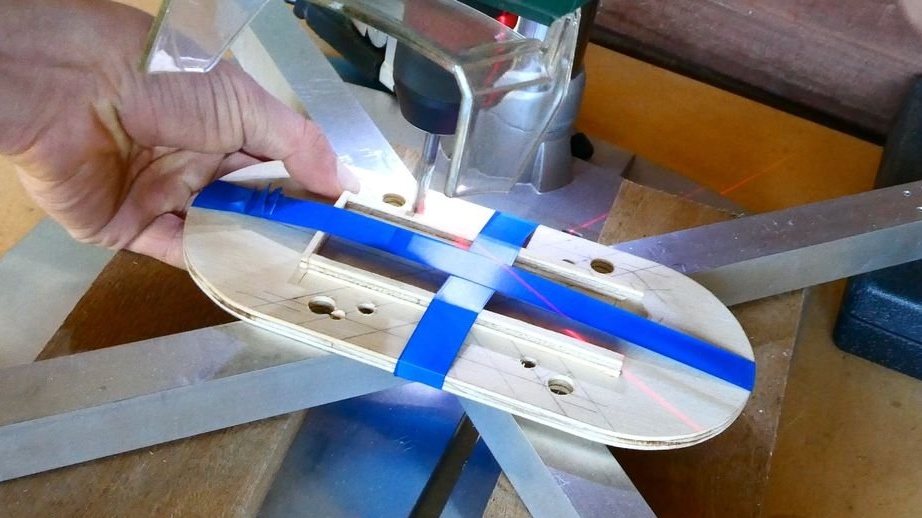
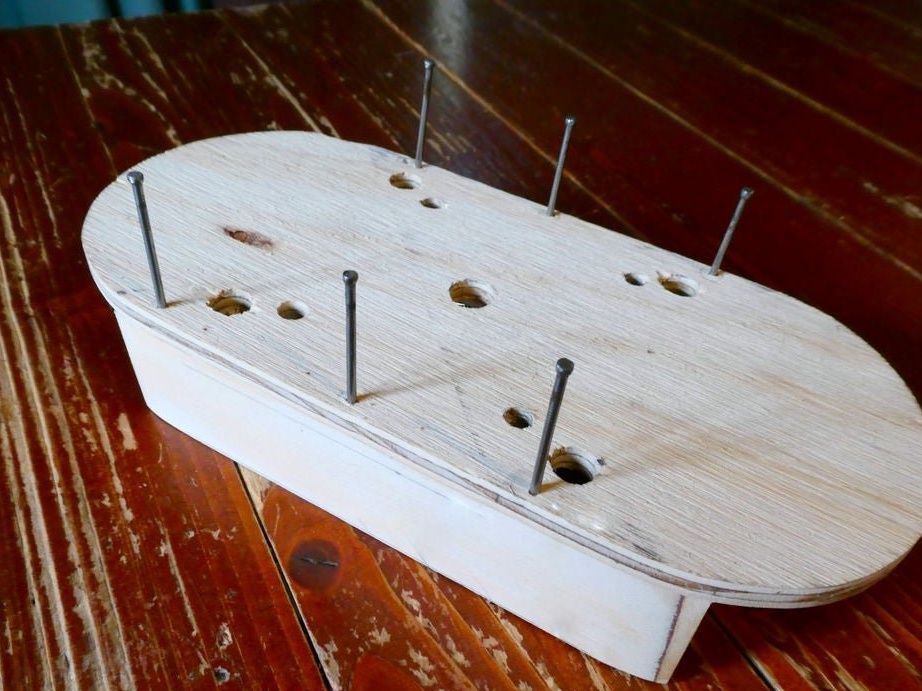
Krok pierwszy: Sprawa
Rodzaj wzór i naklejamy na sklejkę. Wytnij części i wywierć wszystkie otwory.
Umieść baterię na podstawie i wyważ ją. Zarys baterii. Przyklej paski z trzech stron baterii.





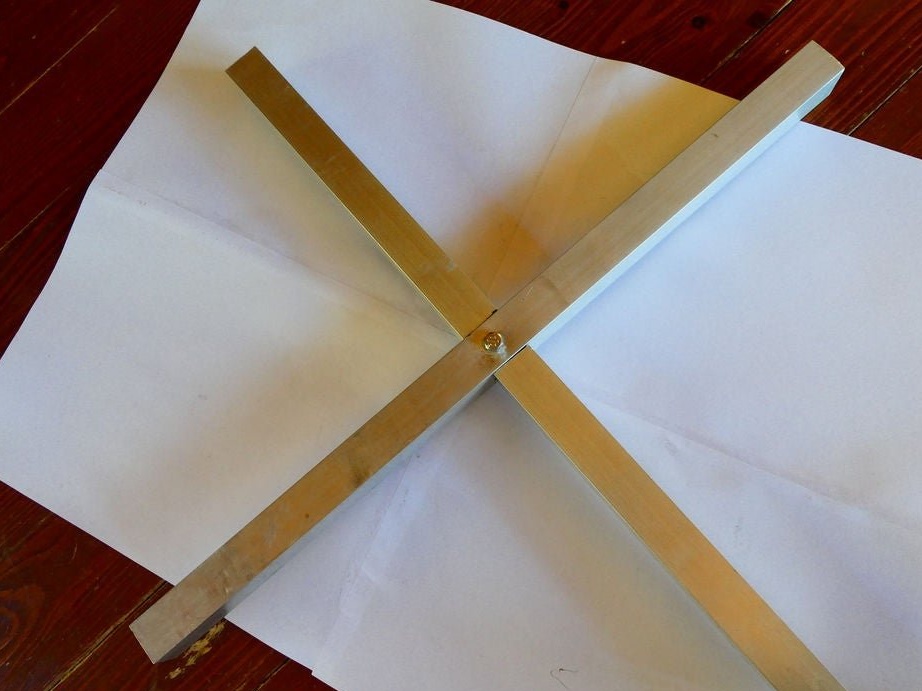
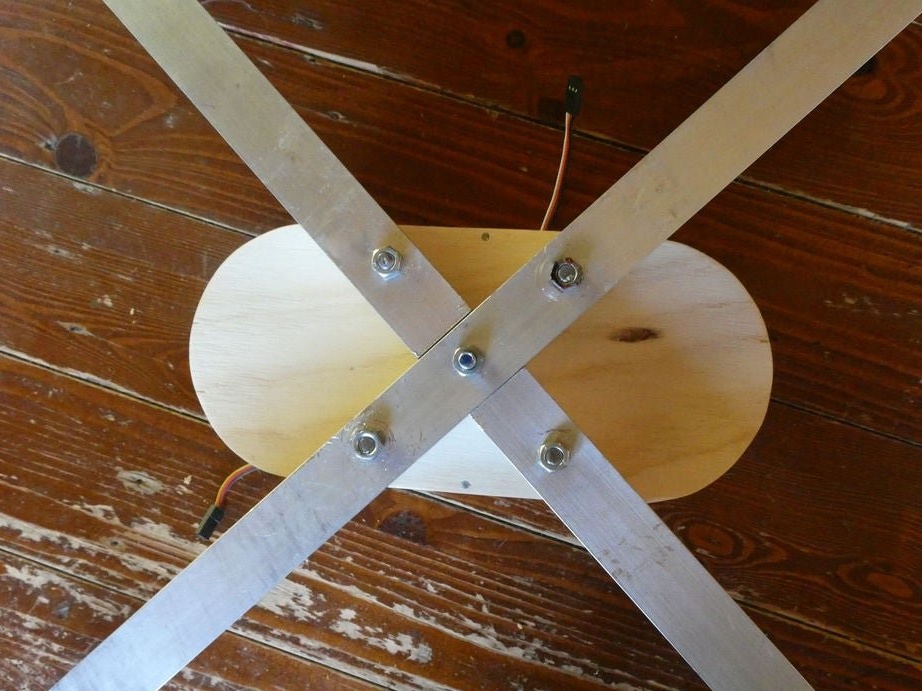
Krok drugi: Ramka
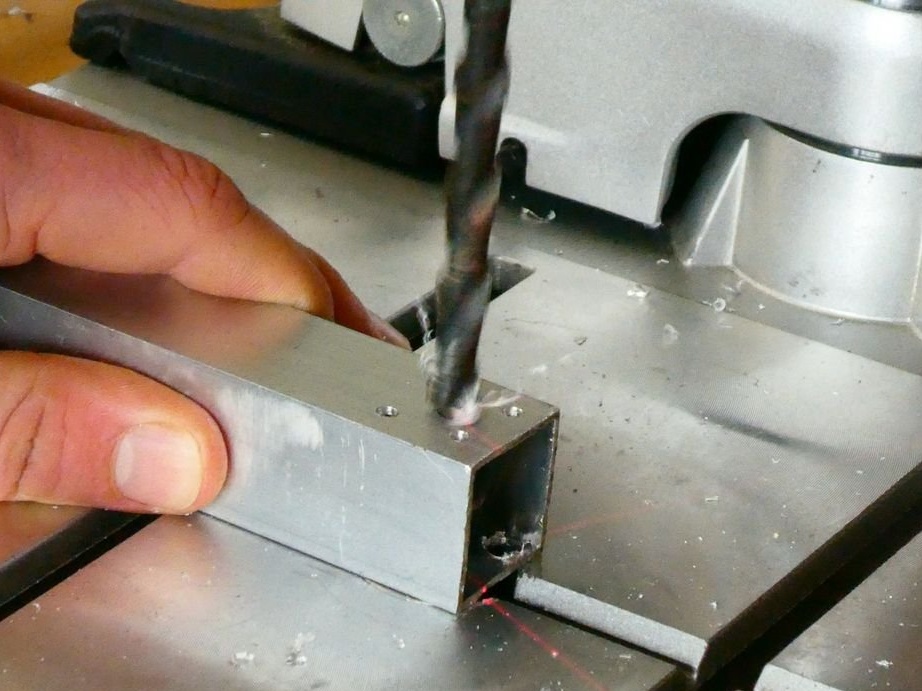
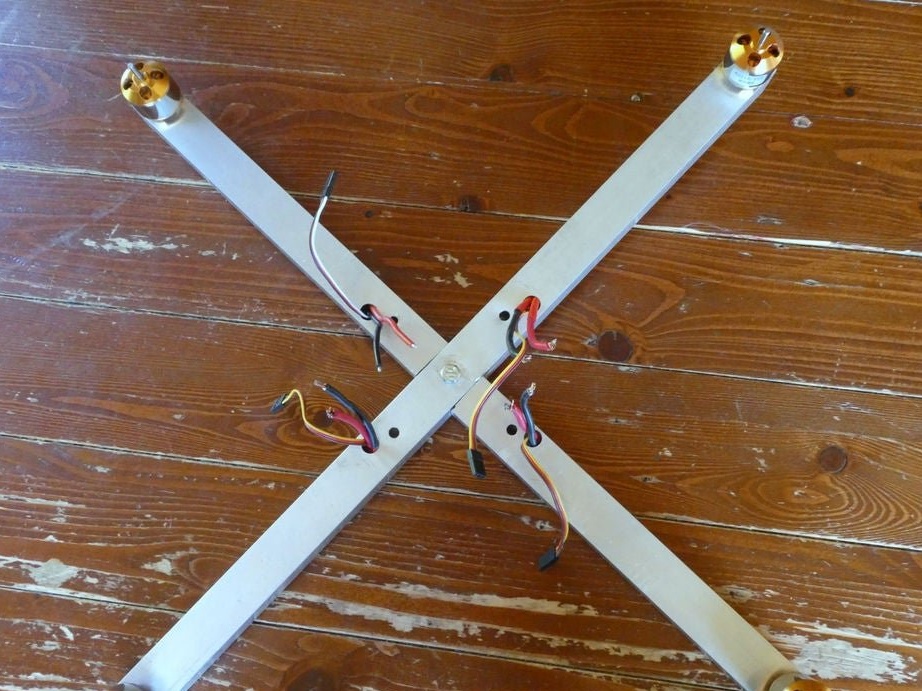
Przetnij aluminiową rurę profilową na dwie równe części (po 50 cm każda). Wytnij dwa rowki o średnicy 2,5 cm na środku rur i wywierć otwór w środku otworu. Zamontuj krzyż i przymocuj śrubą.

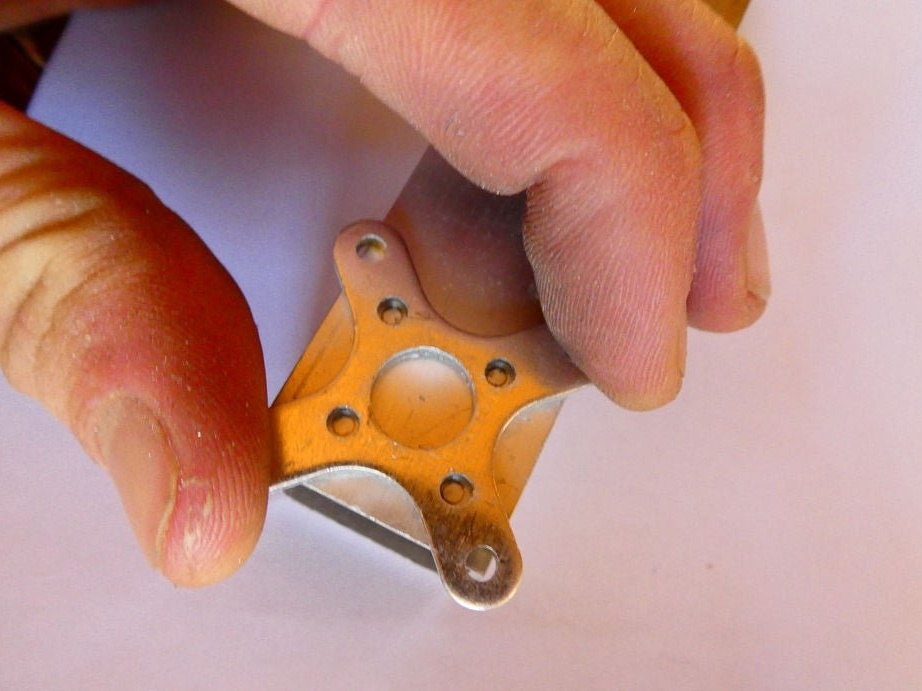
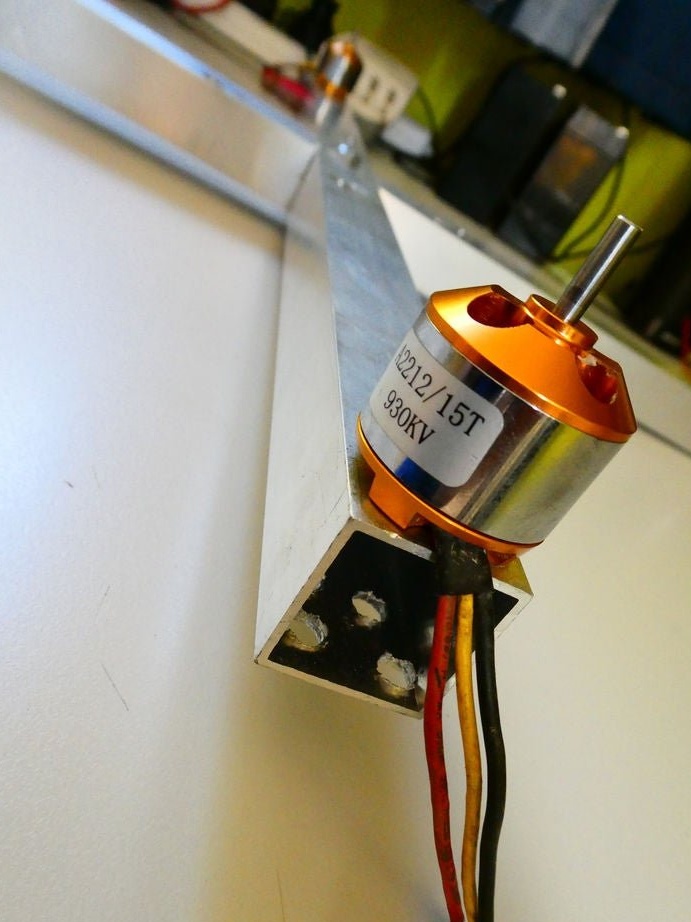
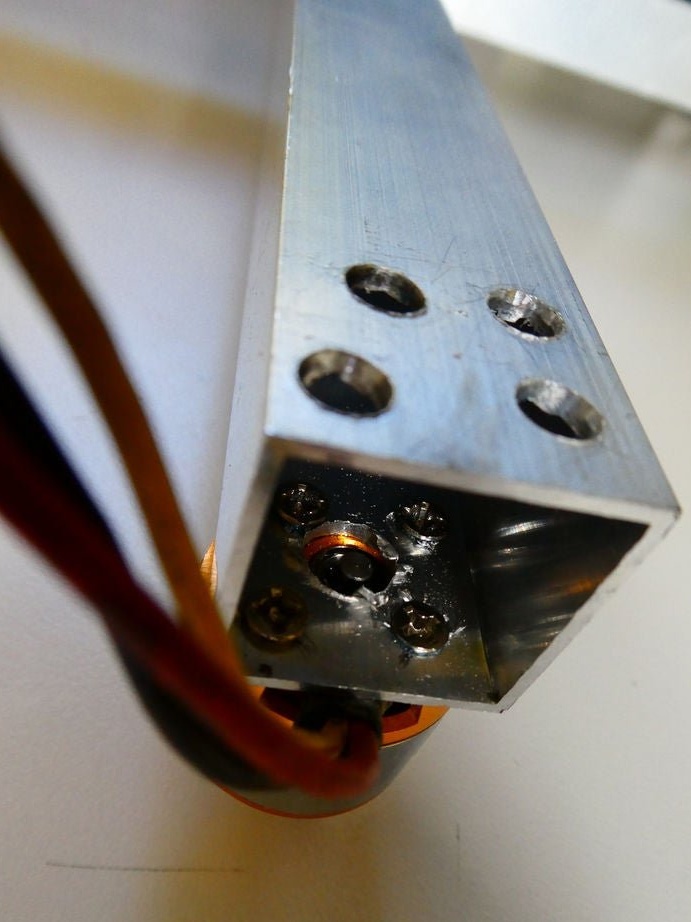
Teraz użyj dołączonego do nich uchwytu silnika, aby zaznaczyć otwory montażowe. Wywierć otwory. Kolce należy przeszlifować.

Zaznacz i wywierć otwory montażowe do przymocowania podwozia do ramy.
Przyklej boczne paski do ciała.

Krok trzeci: instalacja
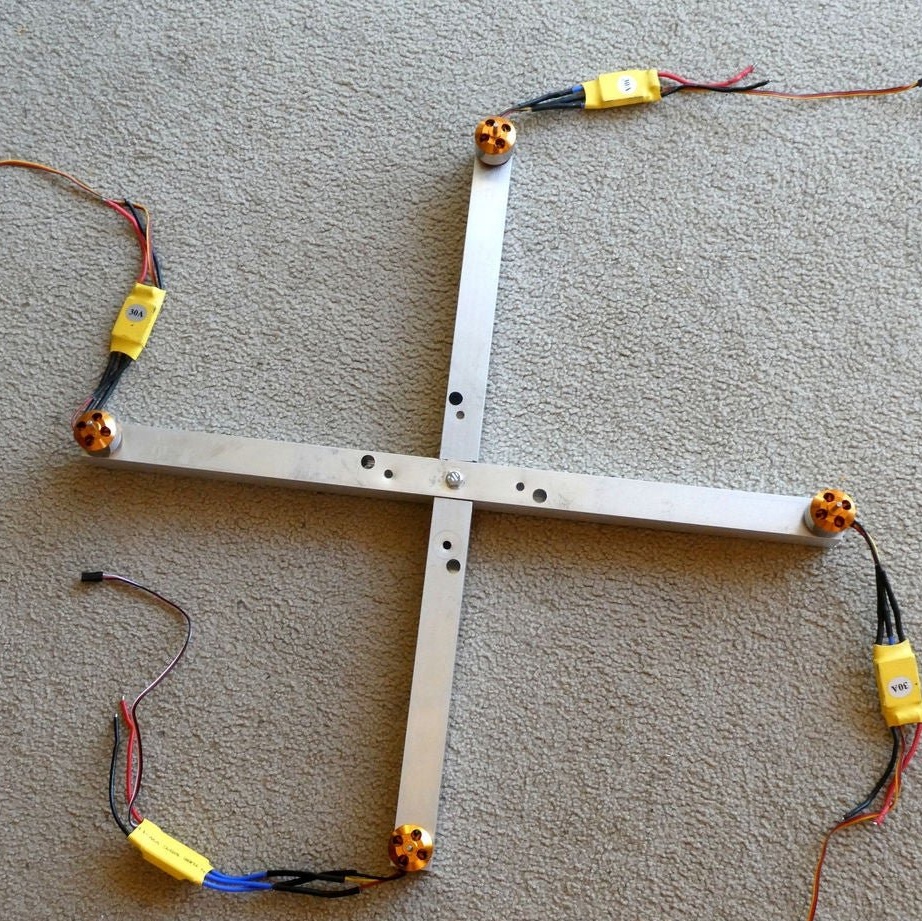
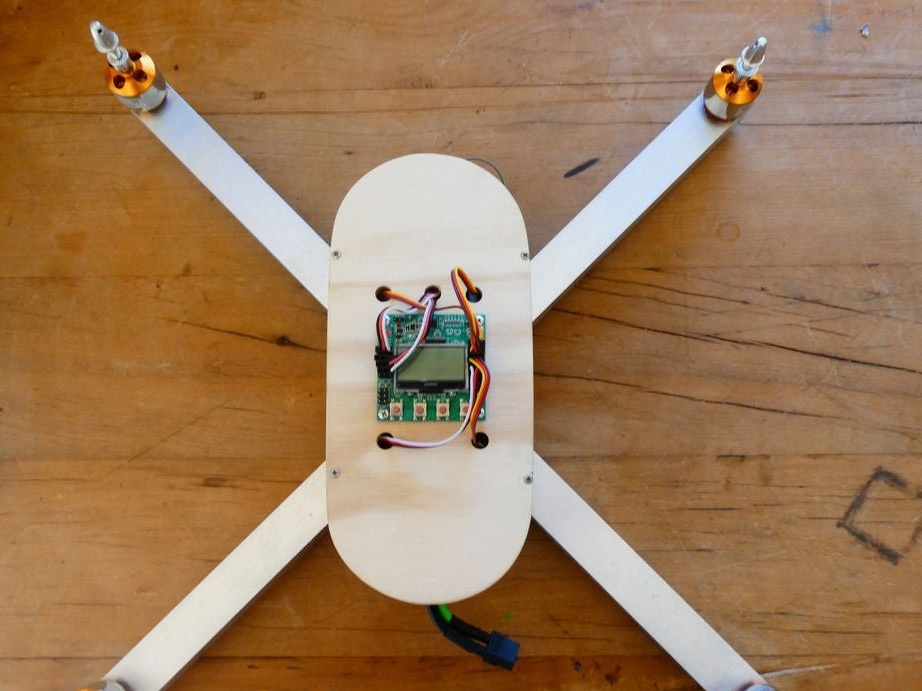
Teraz musisz naprawić silniki na ramie. Konieczne jest zastosowanie blokady gwintu na śrubach mocujących, w przeciwnym razie śruby zostaną odkręcone, a silniki odlecą.
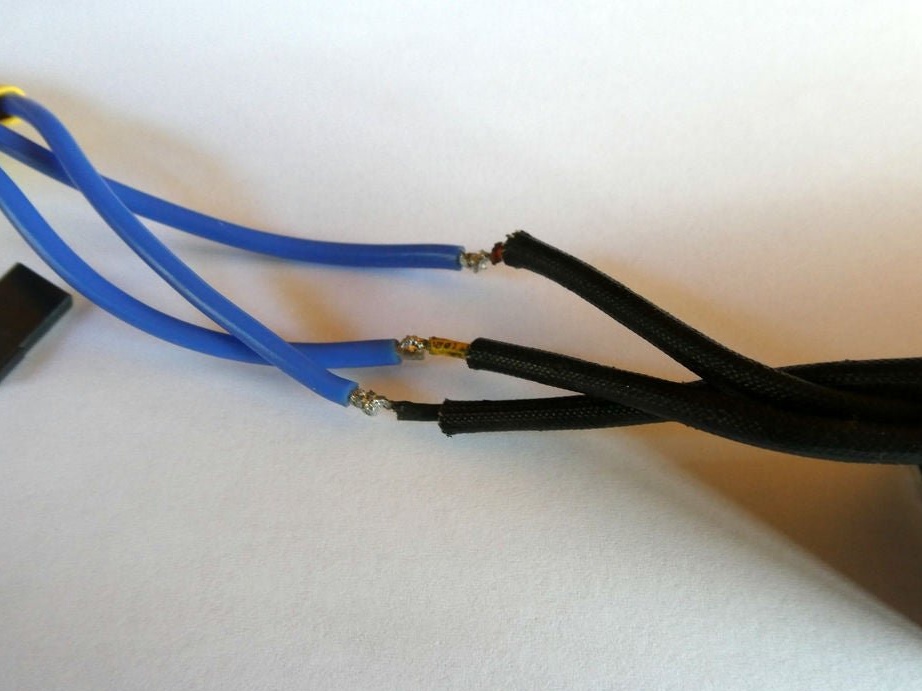
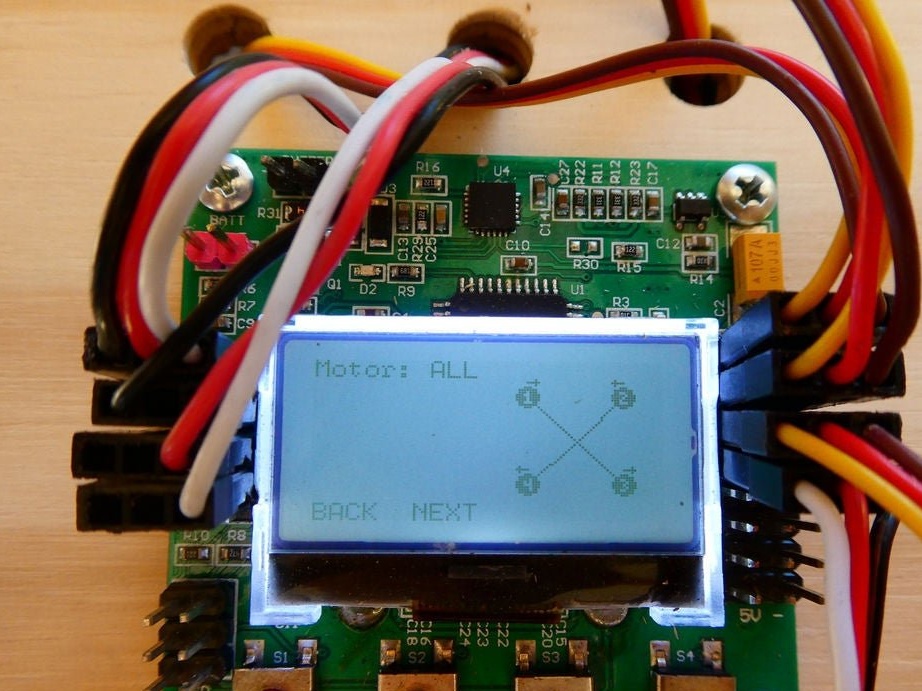
Podłącz ESC do silników, aby lewy górny silnik obracał się zgodnie z ruchem wskazówek zegara, prawy górny silnik obracał się przeciwnie do ruchu wskazówek zegara, dolny prawy silnik obracał się zgodnie z ruchem wskazówek zegara, a dolny lewy silnik obracał się przeciwnie do ruchu wskazówek zegara. Aby zmienić kierunek obrotu silników, zamień dowolne dwa z trzech przewodów. Zaizoluj połączenia.
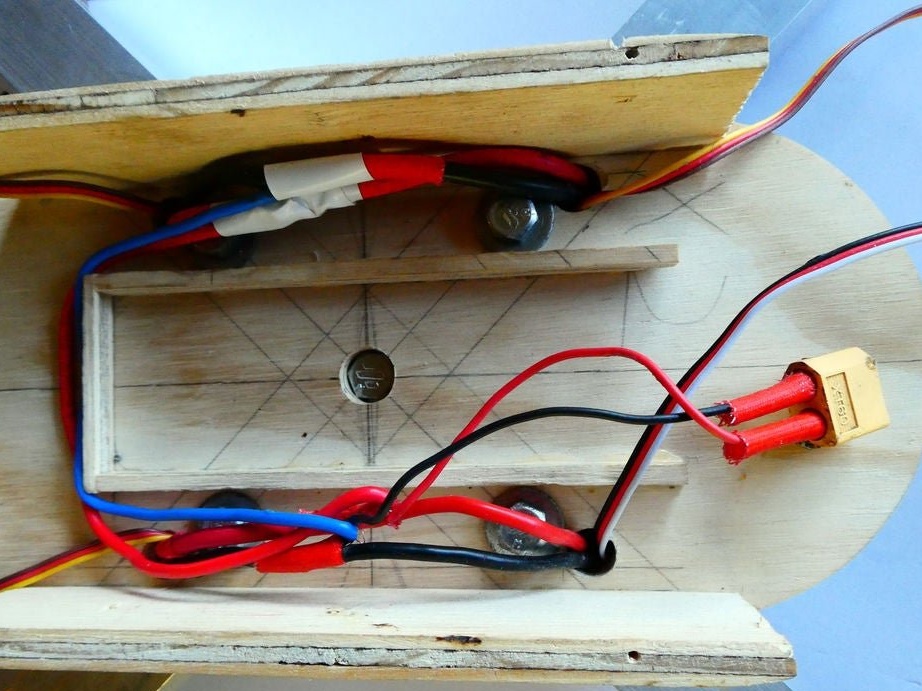
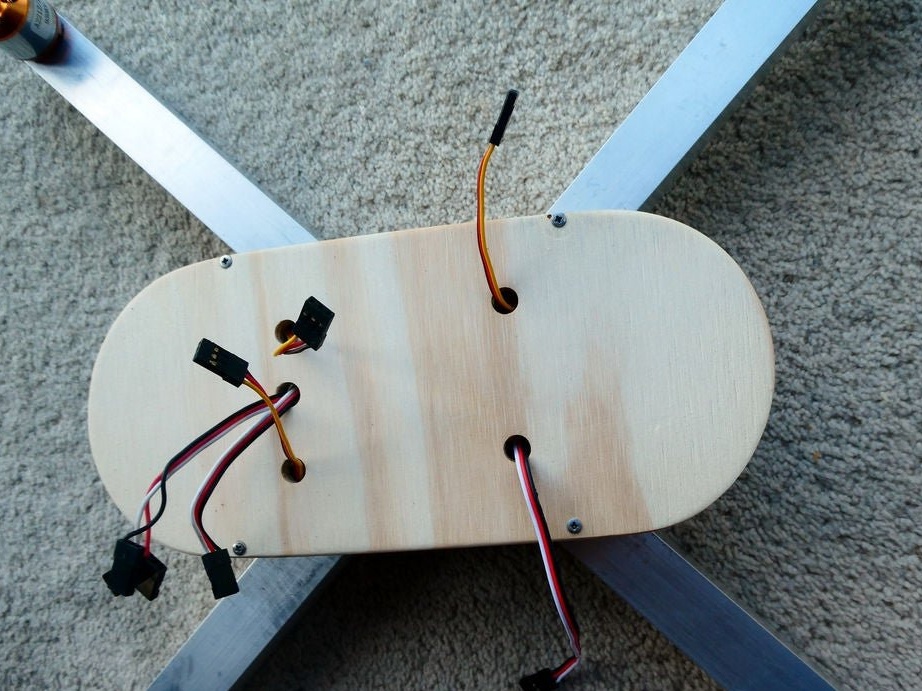
Przeciągnij przewody przez ramę i wsuń do otworu, ESC jest zamocowany wewnątrz rur ramy.

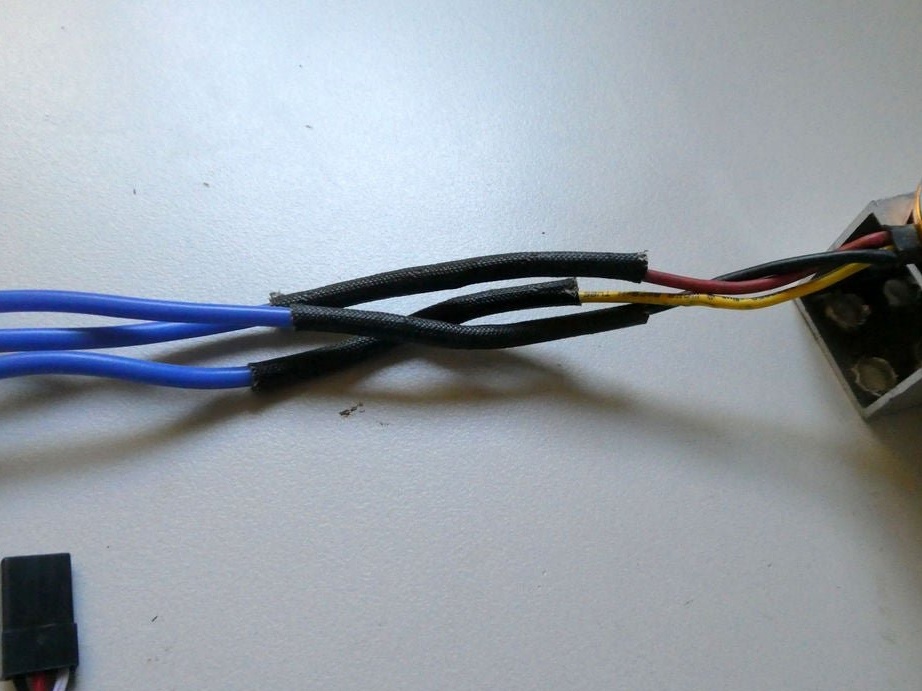
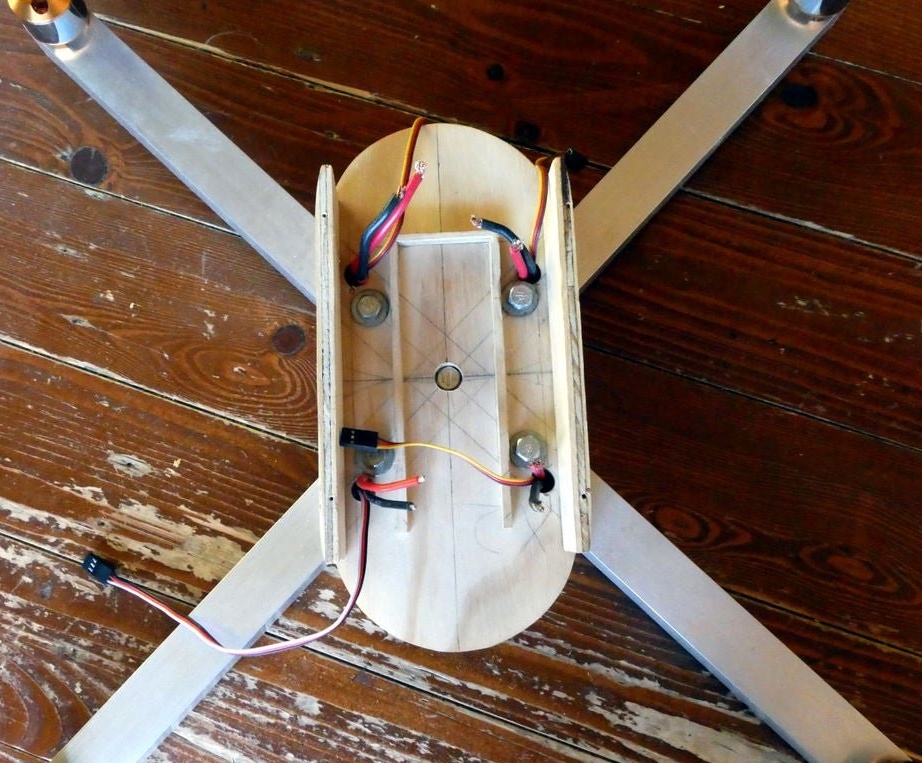
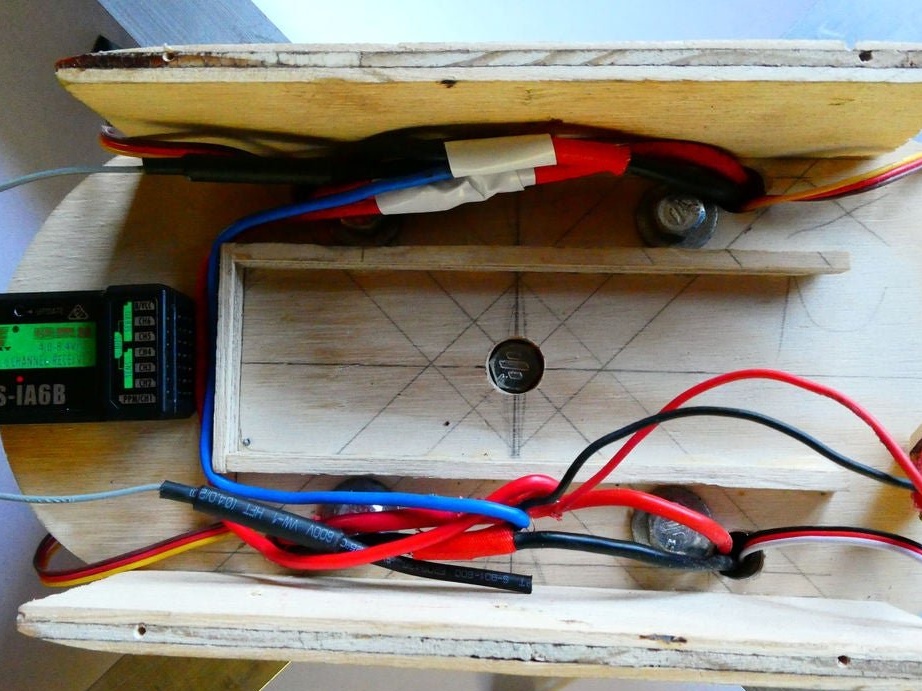
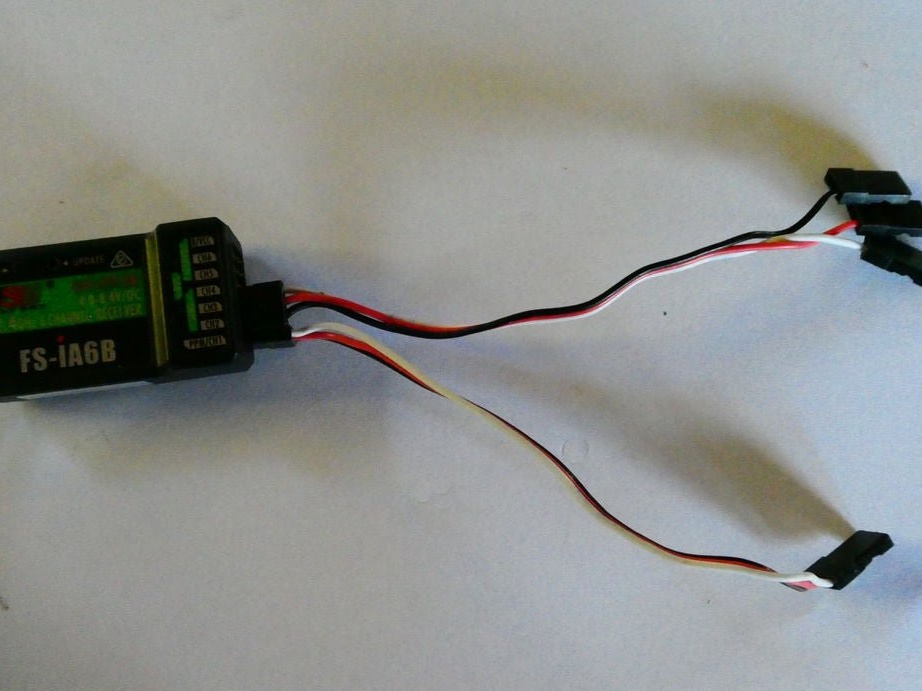
Połącz wszystkie czarne (minus) i wszystkie czerwone (plus) przewody razem. Przylutuj dwa przewody do złącza XT60 (czerwony i czarny). Przymocuj odbiornik do ramy za pomocą dwustronnej taśmy.
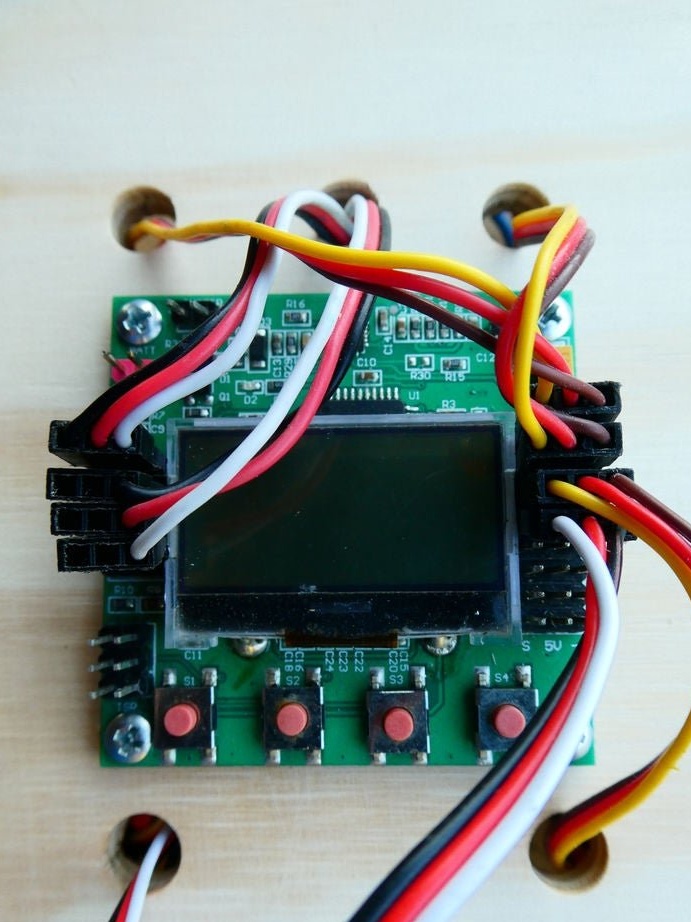
Przeciągnij przewody od kontrolera i odbiornika przez otwory w pokrywie komory, a następnie przykręć pokrywę. Przykręć kontroler do pokrywy. Podłącz przewody do tablicy sterowania lotem.
Krok czwarty: konfiguracja
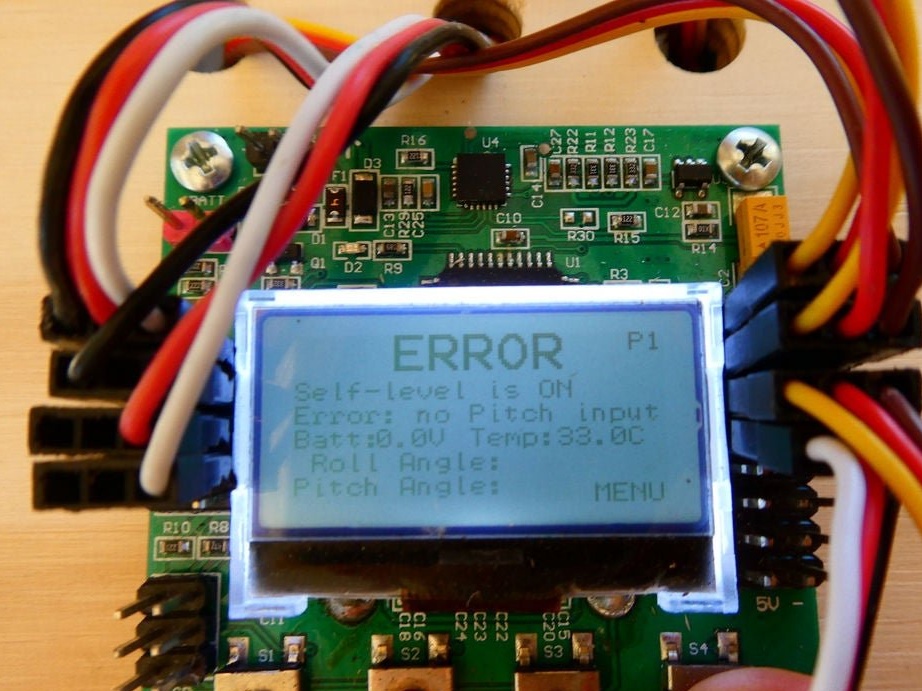
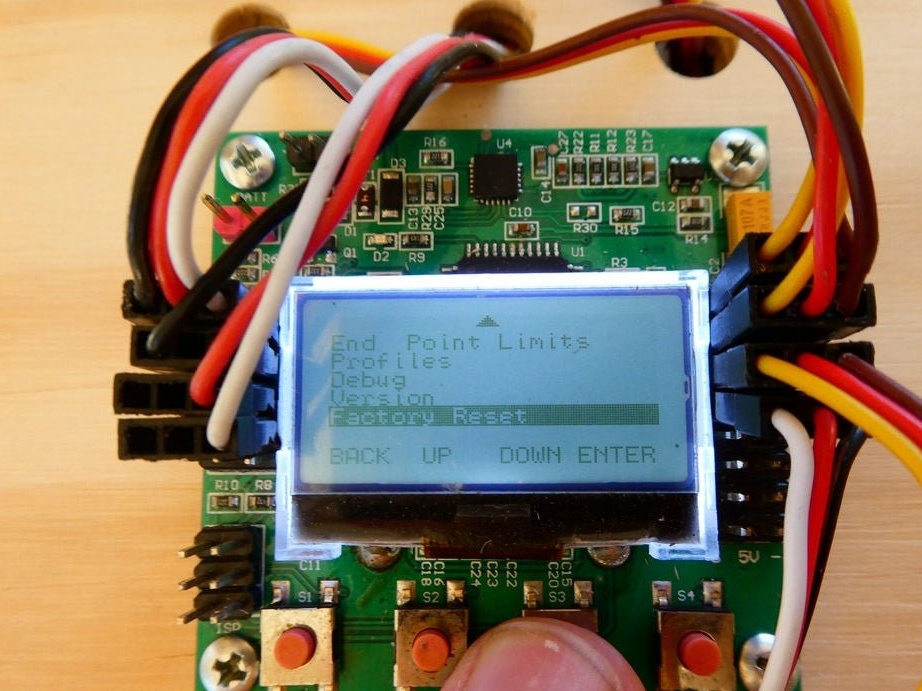
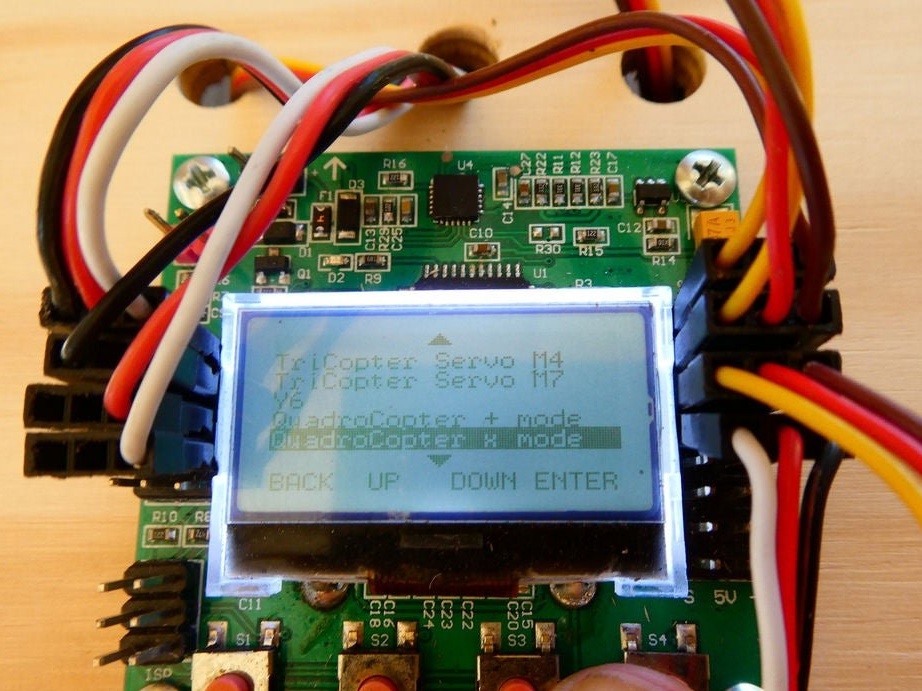
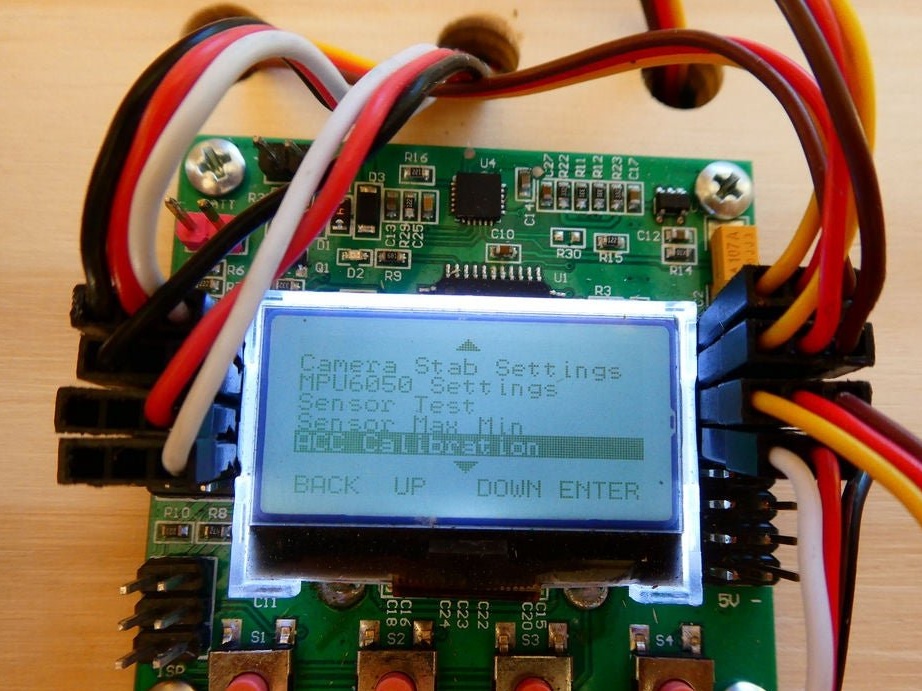
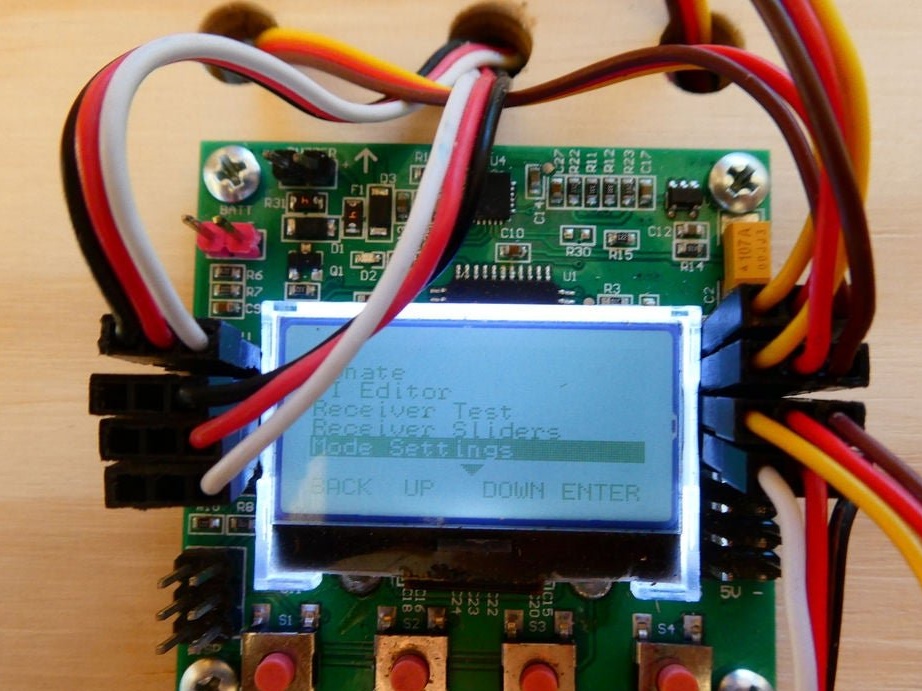
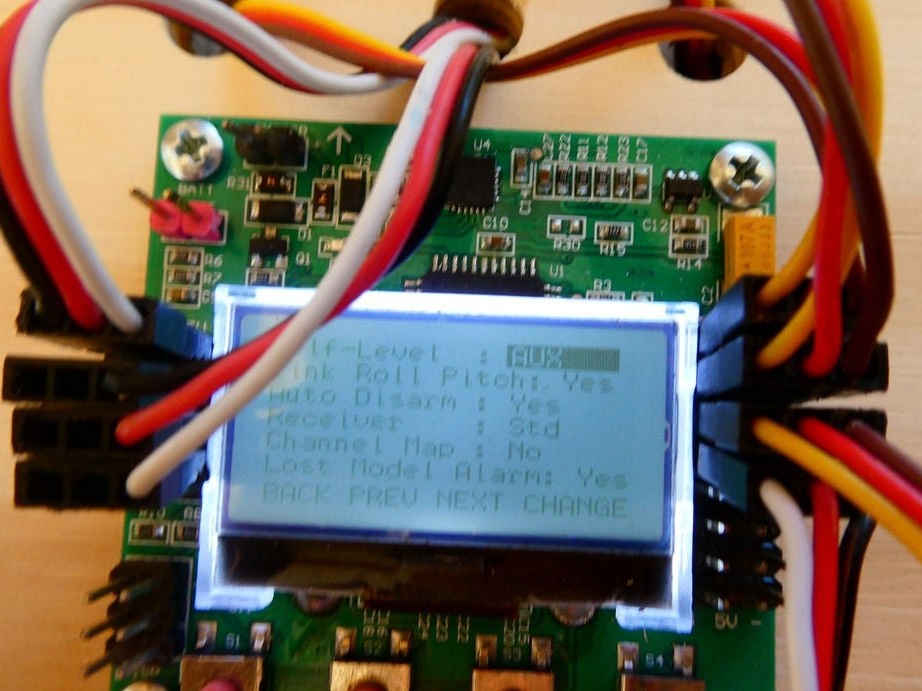
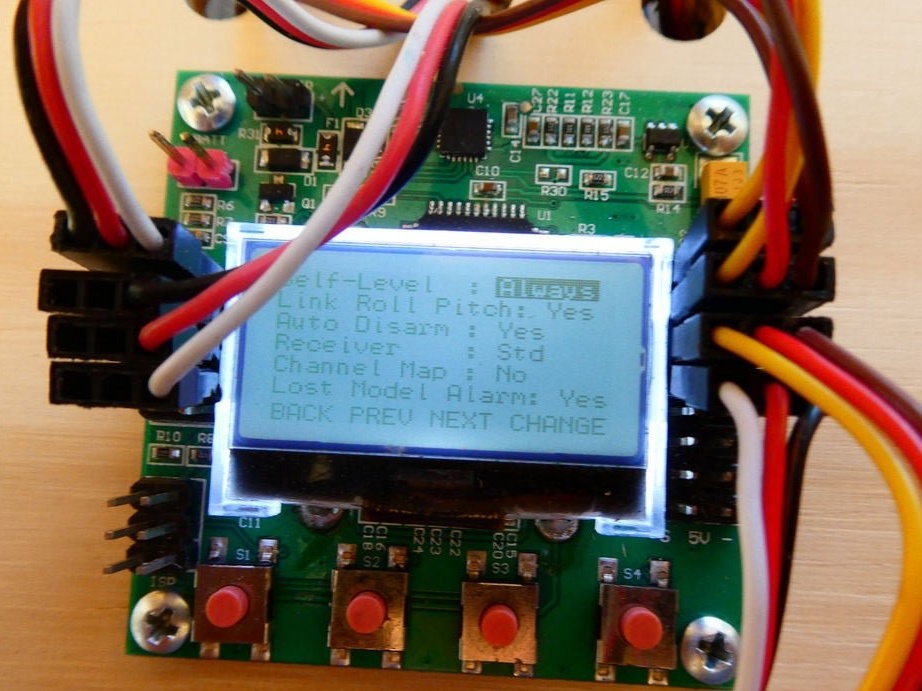
Podłącz baterię, a kontroler powinien się uruchomić. Komunikat o błędzie powinien pojawić się na wyświetlaczu. Zignoruj to i naciśnij przycisk menu. Przewiń w dół i kliknij „reset”. Następnie powinno pojawić się menu, aby wybrać pożądaną ramkę dronów. Przewiń w dół, aż dojdziesz do trybu Quadcopter-X i naciśnij „zaakceptuj”. Naciśnij wstecz i wybierz „Kalibracja AUX”. Umieść drona na płaskiej powierzchni i kliknij „kalibruj”. Po zakończeniu przewiń w górę do ustawień trybu i zmień poziom automatyczny z „AUX” na „Zawsze”.
Wyłącz baterię, włącz kontroler, a następnie podłącz ponownie baterię. Kontroler lotu powinien się włączyć i wyświetlić BEZPIECZNIE. Przejdź od lewego do lewego rogu, a wyświetlacz powinien zmienić się z SAFE na ARMED,
Krok piąty: śmigła
Przymocuj śruby do wałków silnika.


Wszystko jest gotowe. I na koniec kilka wskazówek od mistrza.
Początkowo kwadrokopter może wydawać się trudny do kontrolowania. Najlepszym sposobem na rozpoczęcie lotu jest wspięcie się około 1 metra nad ziemią i lot w obie strony, w lewo iw prawo, a następnie uruchomienie quadkoptera w okręgu. Quadkopter nie lubi lotu „szorującego”, więc naucz się obsługiwać płynnie.
Zaczynając latać, trzymaj tył drona skierowany do siebie, abyś zawsze wiedział.
Śruby z włókna węglowego są mocniejsze niż śruby z tworzywa sztucznego i nie pękają w ten sposób.


