
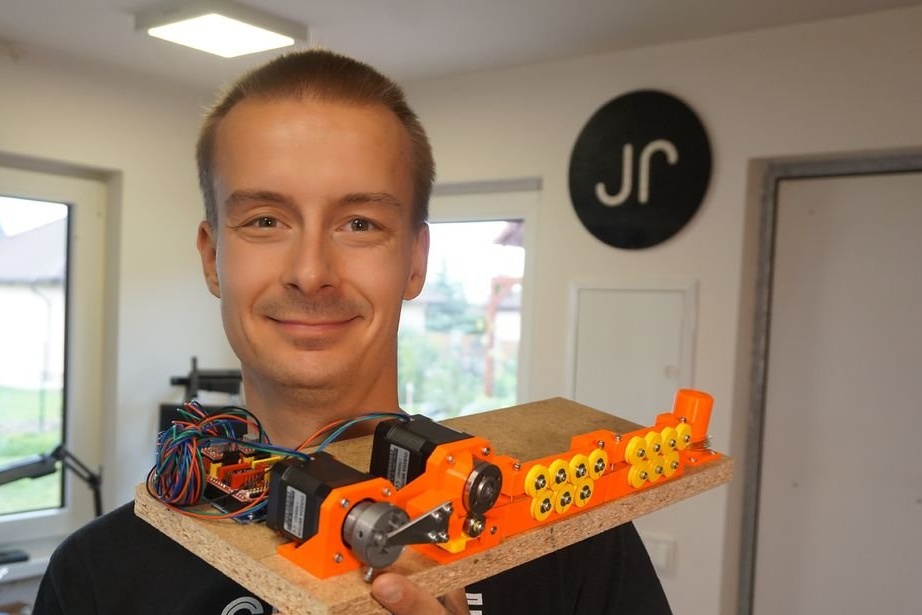
Ciekawe urządzenie zostało wynalezione i wyprodukowane przez Mistrza, jest to urządzenie do gięcia drutu o dowolnym kształcie. Wykonywanie sprężyn jest jedną z jego cech. Ta maszyna jest w stanie zginać drut 0,8 / 0,9 / 1 mm w dowolny kształt 2D.
Głównym celem produkcji tej maszyny było zautomatyzowanie procesu gięcia. Inne domowe maszyny nie są bardzo dokładne, a ich łuki mają dość duży promień.
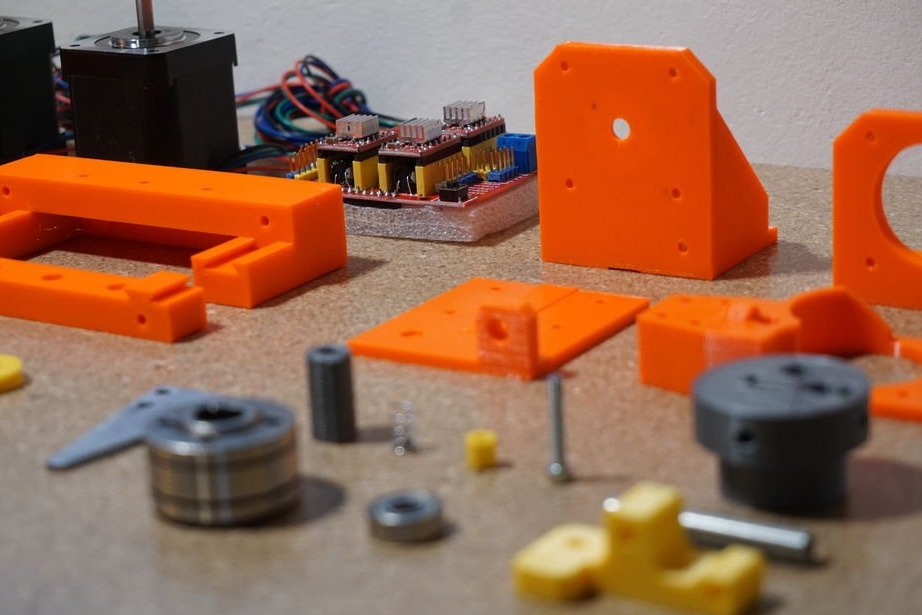
Drugim zadaniem było jak najprostsze wykorzystanie powszechnie dostępnych części i komponentów. Niektóre części urządzenia są drukowane na drukarce 3D, a części metalowe można kupić w sklepie.
Do czego służy mistrz takiej maszyny? Interesuje go tworzenie figurek LED, płatków śniegu, gwiazd, kwiatów itp. Do ich produkcji potrzebne są identyczne części z drutu, a ta maszyna ułatwi ich produkcję.
Zobaczmy krótki film z przykładem urządzenia.
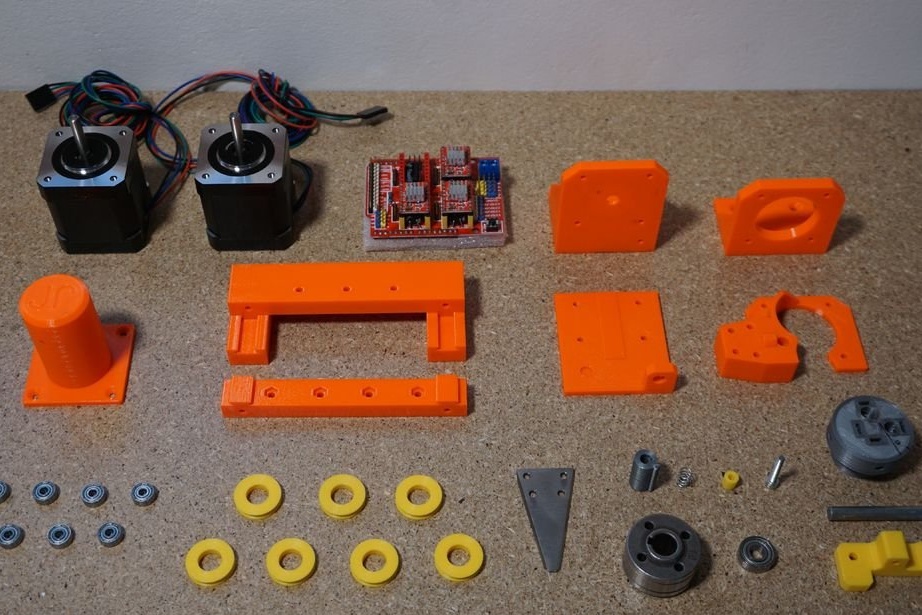
Tak więc, do produkcji takiej maszyny, mistrz zastosował następujące
Narzędzia i materiały:
-3D szczegóły (pliki do wydruku można pobrać tutaj);
- łączniki;
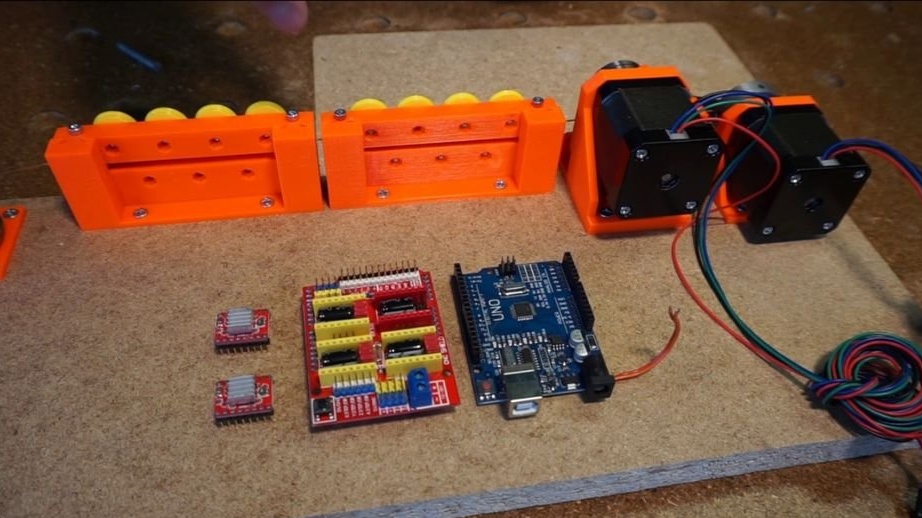
-Arduino UNO;
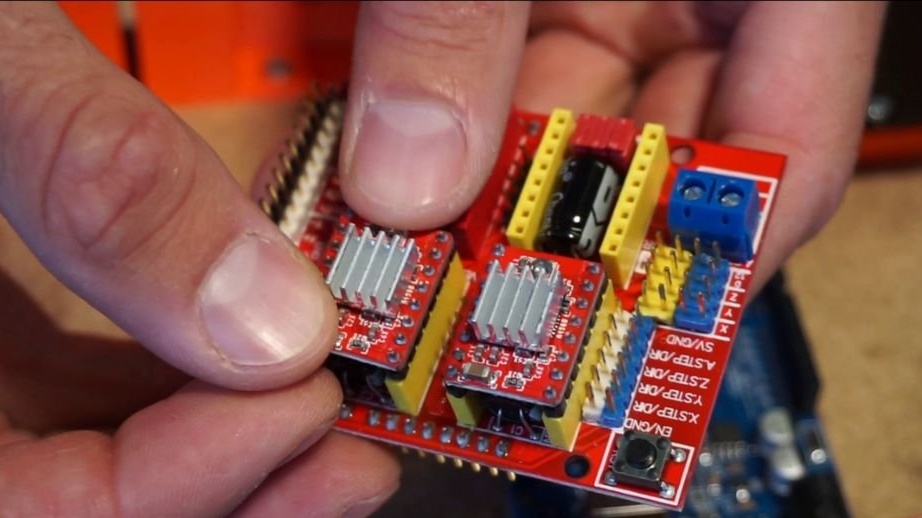
-Płyta rozszerzająca dla Arduino UNO;
Sterownik krokowy A4988 -2 szt .;
-Stop silnika NEMA17 -2 szt .;
-12V 3A zasilacz;
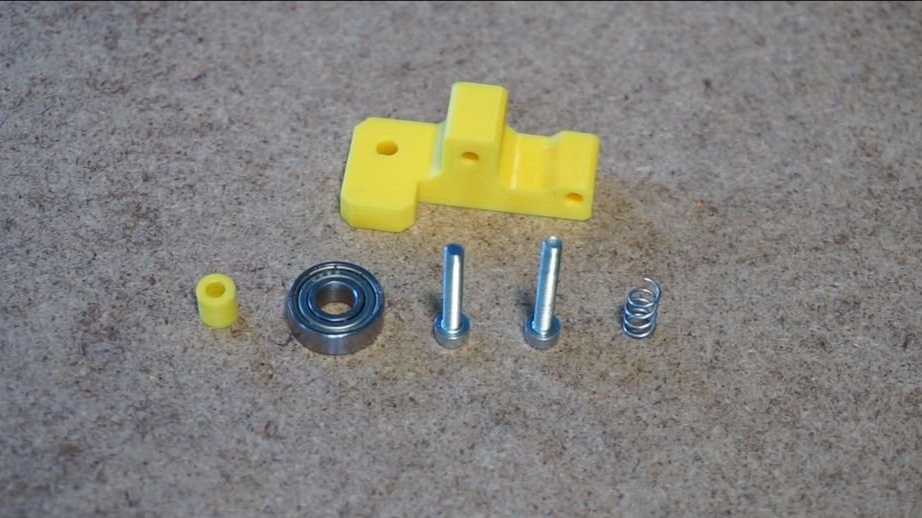
- mechanizm podawania drutu;
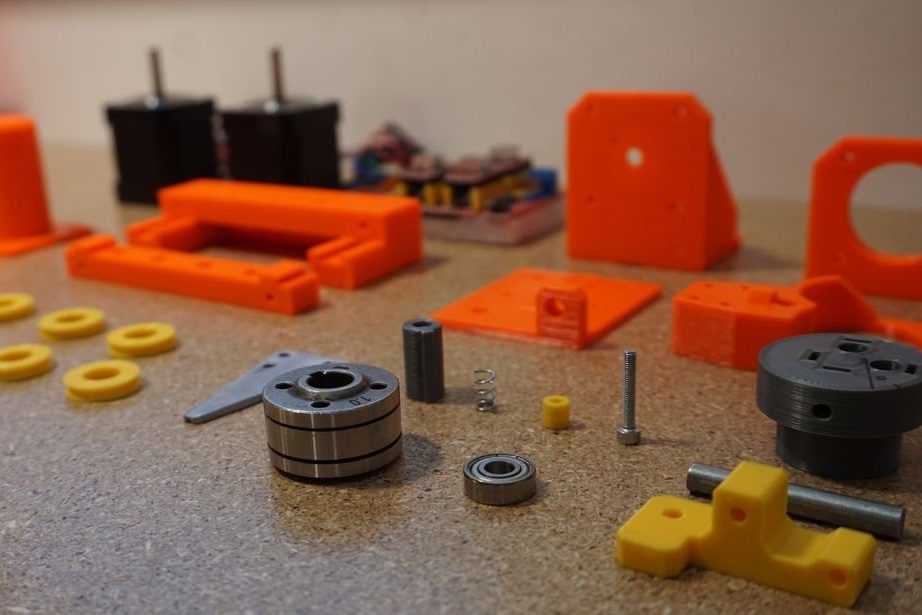
-Stała sprężyna 4x6 mm;
- Łożysko 3x10x4 mm;
- Łożysko 6x15x4 mm;
-6 mm pręt stalowy;
- blacha stalowa o grubości 2 mm;
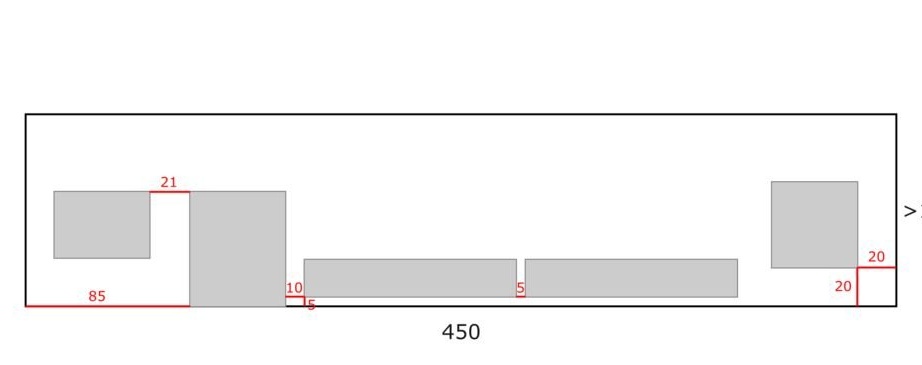
-Drewna deska do podstawy 450x100 mm;
- śrubokręt;
-Gon;
Krok pierwszy: jak to działa
Spójrzmy, jak działa maszyna (od prawej do lewej).
Uchwyt szpuli - utrzymuje szpulę drutu do obróbki maszyny.
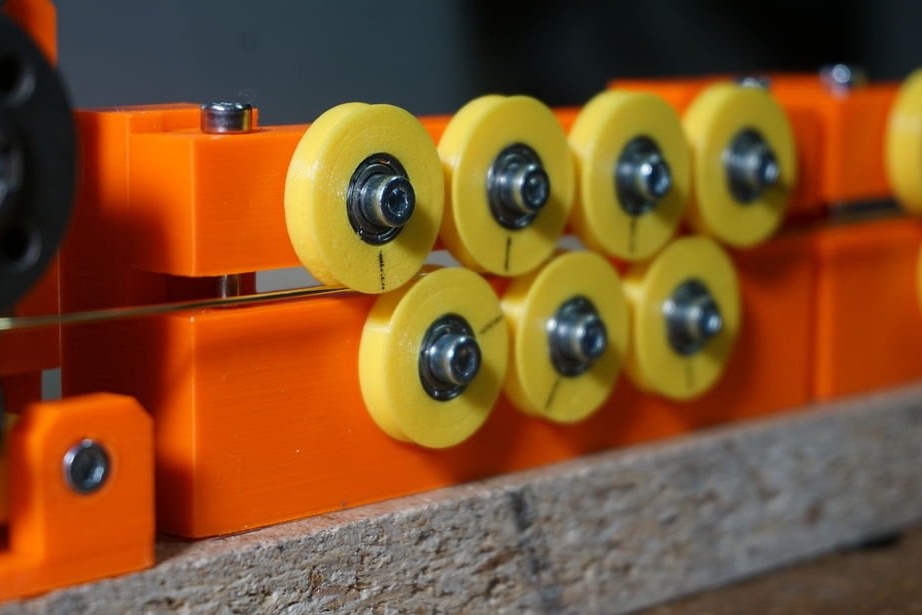
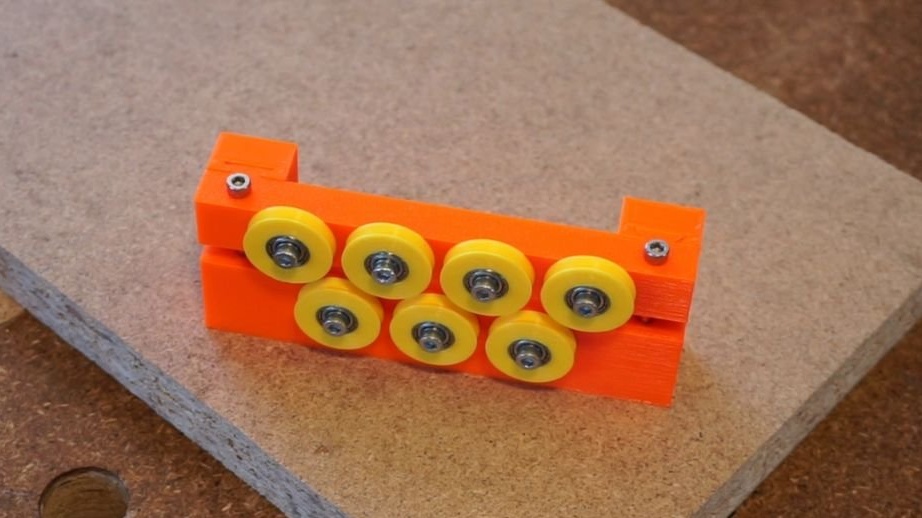
Prostownik - zestaw 7 rolek, aby drut był jak najbardziej równomierny. Praca z drutem prostym jest bardzo ważna. Właśnie dlatego dwa prostowniki.
Przeciągnij - możesz znaleźć podobny mechanizm w swojej drukarce 3D. Zestaw kół zębatych ciągnie drut ze szpuli przez rolki i przesuwa go do głowicy zginającej. Mechanizm podający musi mieć wystarczający nacisk drutu, aby się nie ślizgał. Więcej na ten temat później.
Giętarka - zgina drut w zaprogramowaną formę.
Wszystko to kontroluje jeden Arduino UN z tarczą CNC.Polecenie jest wysyłane do Arduino z komputera i tłumaczy je na polecenia dla silników krokowych.

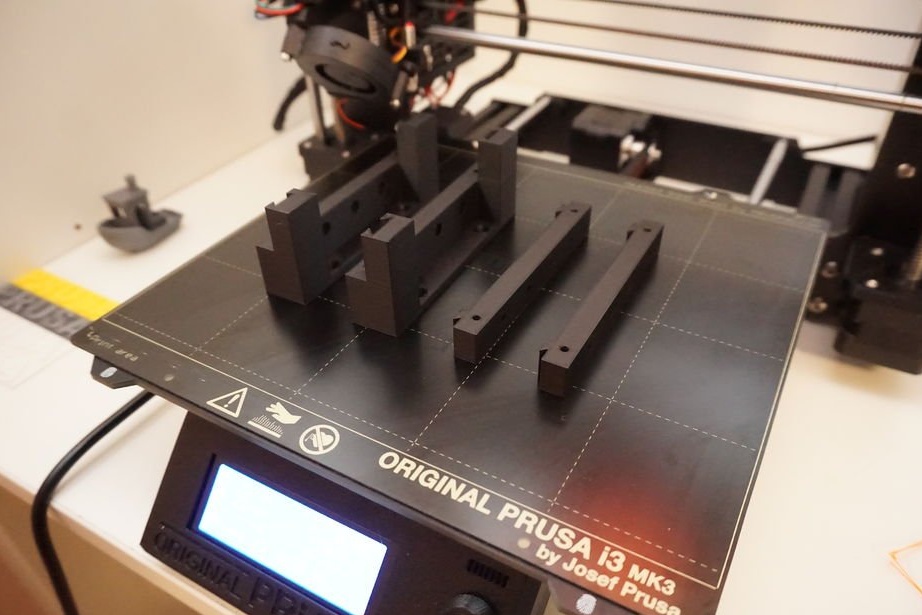
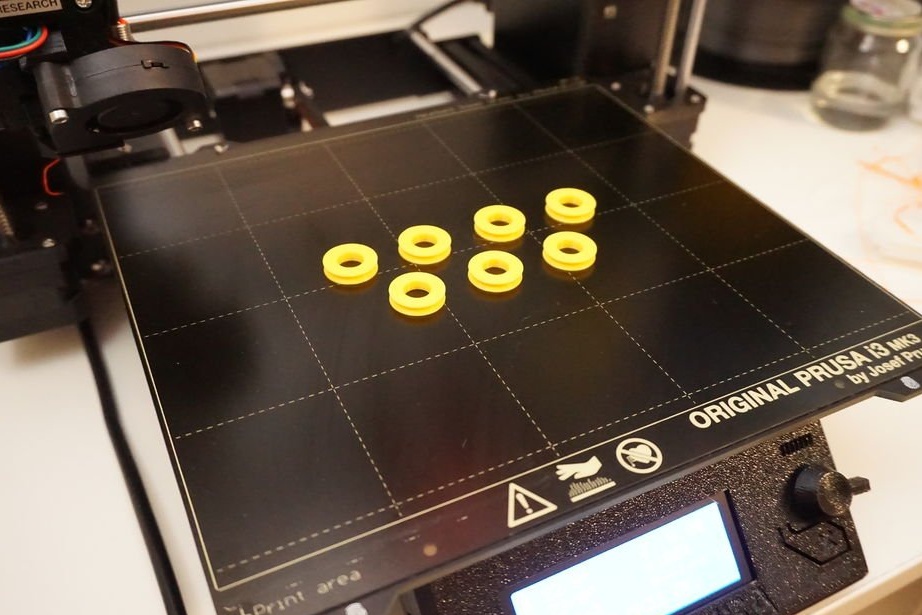
Krok drugi: drukowanie części
Musisz wydrukować następujące szczegóły oraz w następującej ilości (aby uniknąć nieporozumień, oryginalny tekst):
Giętarka
Głowica narzędziowa
Rama silnika
Feeeder
Rama silnika
Rama dolna
Prowadnik drutu
Wózek biegu jałowego
Element dystansowy biegu jałowego
Przekładka przekładni podającej
Płyta do gięcia (szablon)
Rolki prostownicy (2x)
Rama łóżka (2x)
Rama górnego biegu (2x)
Wałek (14x)
Uchwyt na szpulę
Wysokość warstwy przy drukowaniu 0,15 mm. 40% wypełnienia. Drukowanie trwa 2 dni.
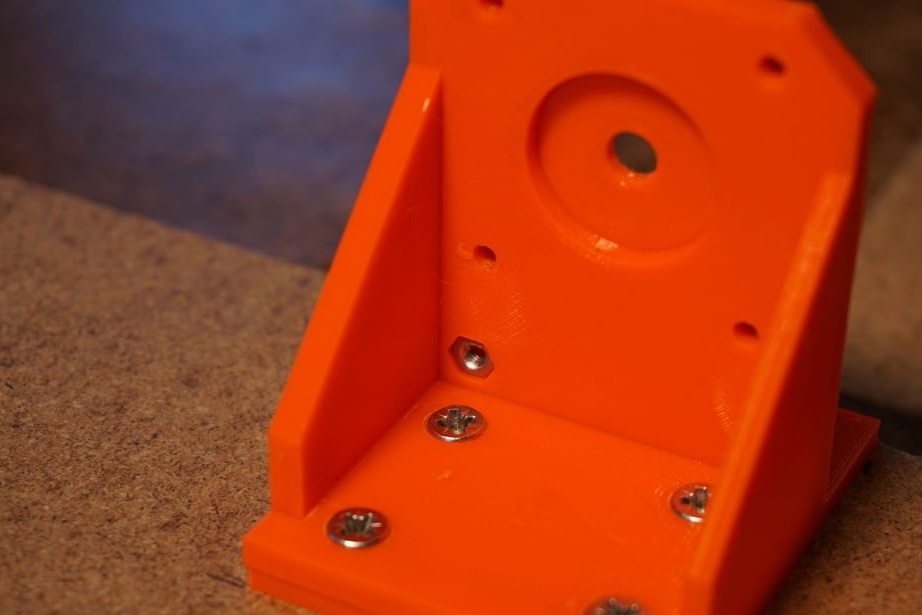
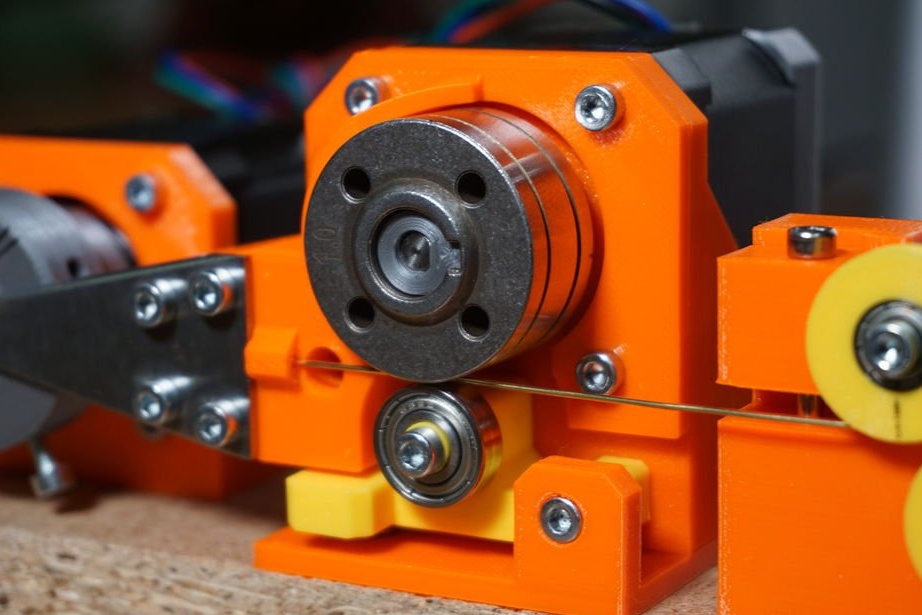
Krok trzeci: Giętarka
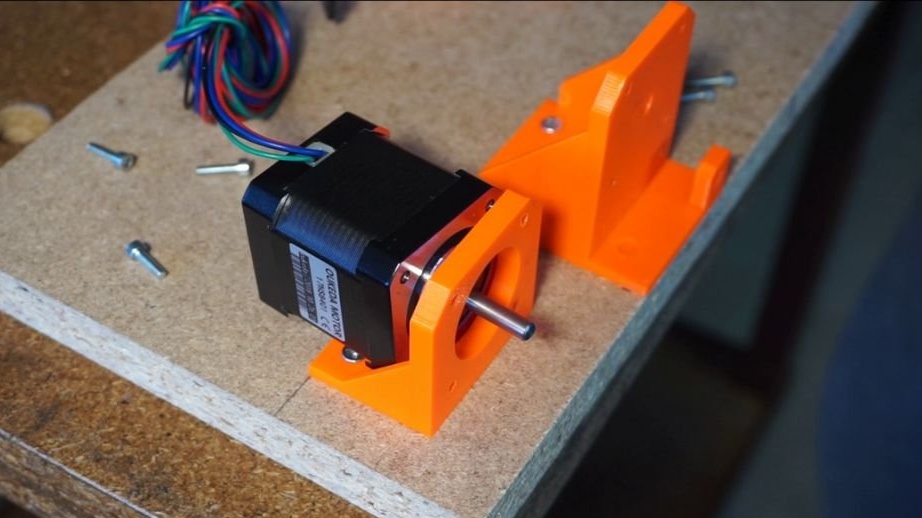
Mistrz przykręca dwie ramy do podstawy. Ważne jest, aby zainstalować obie ramki, jak pokazano na rysunku.
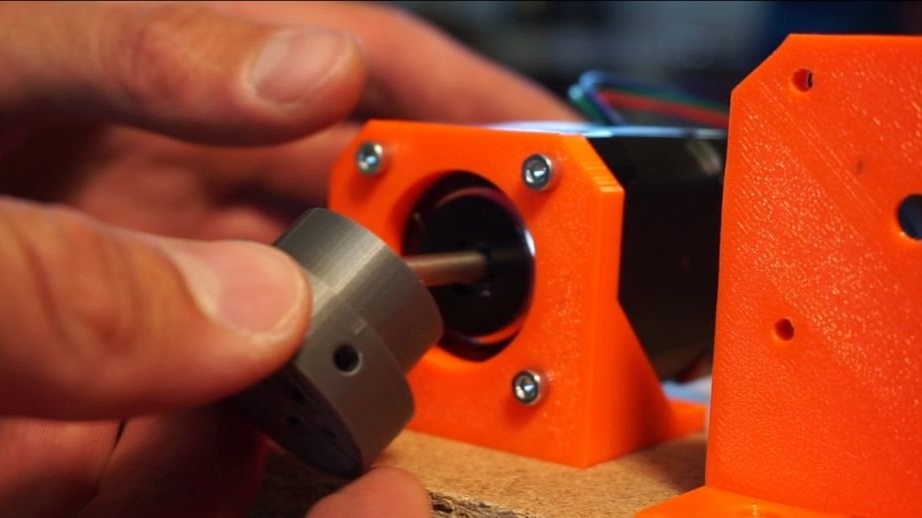
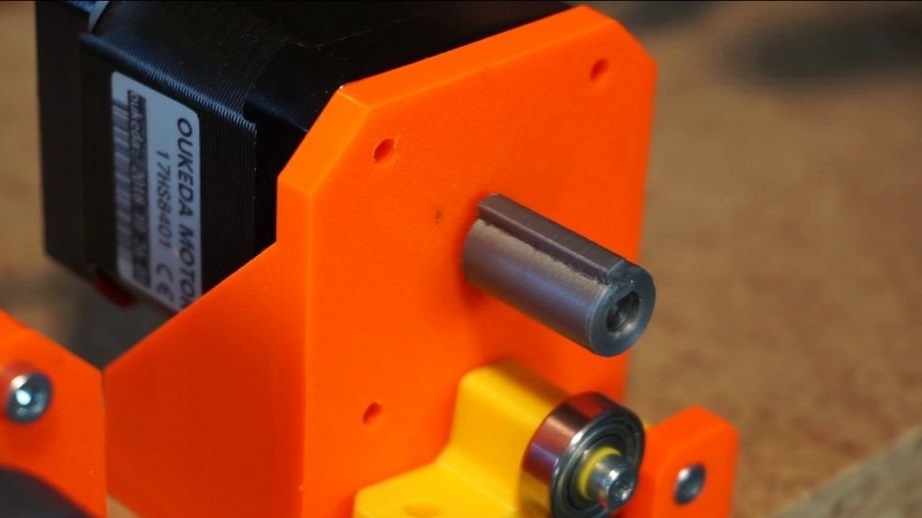
Mocuje silnik krokowy do ramy. Mocuje głowicę do wału silnika.


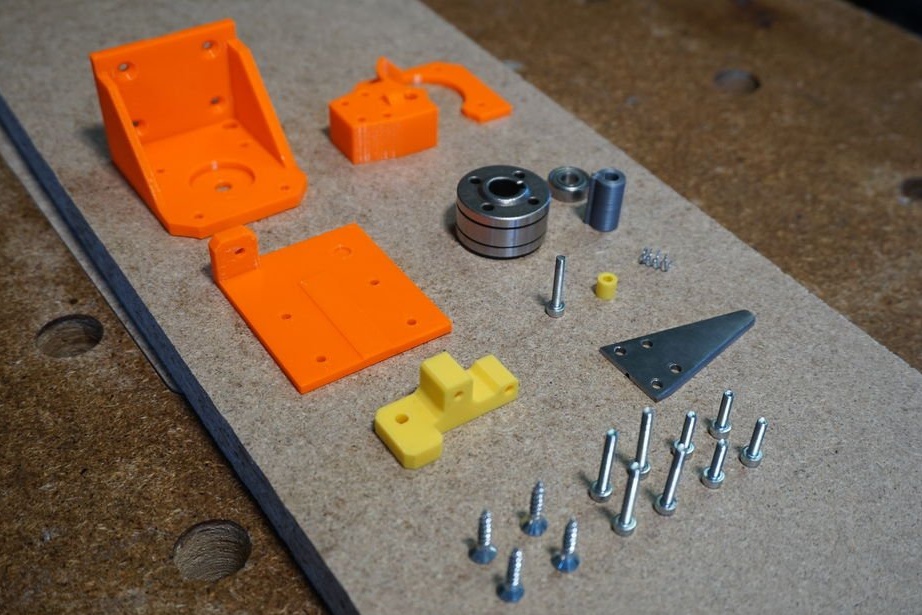
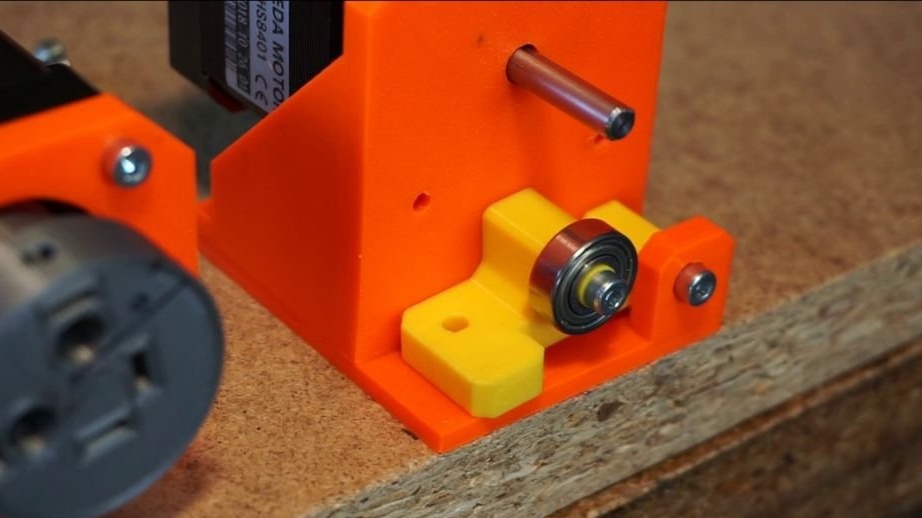
Krok czwarty: przeciągnij
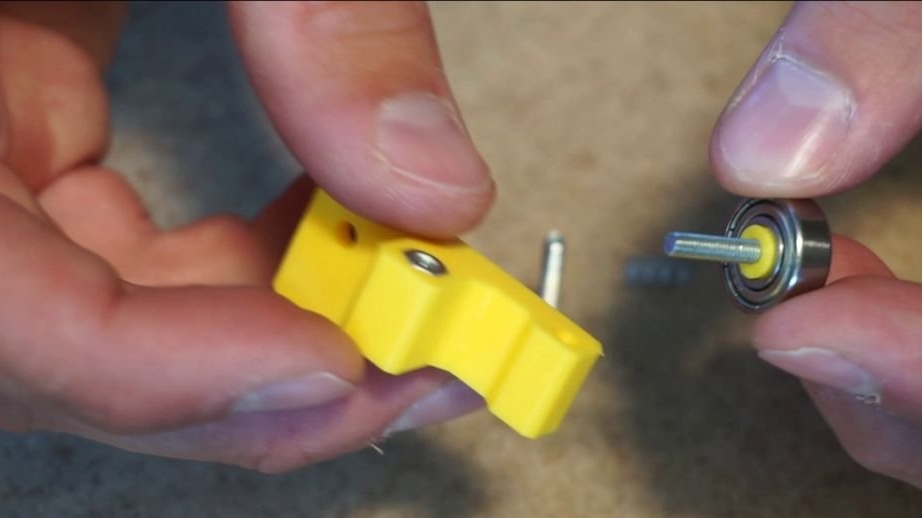
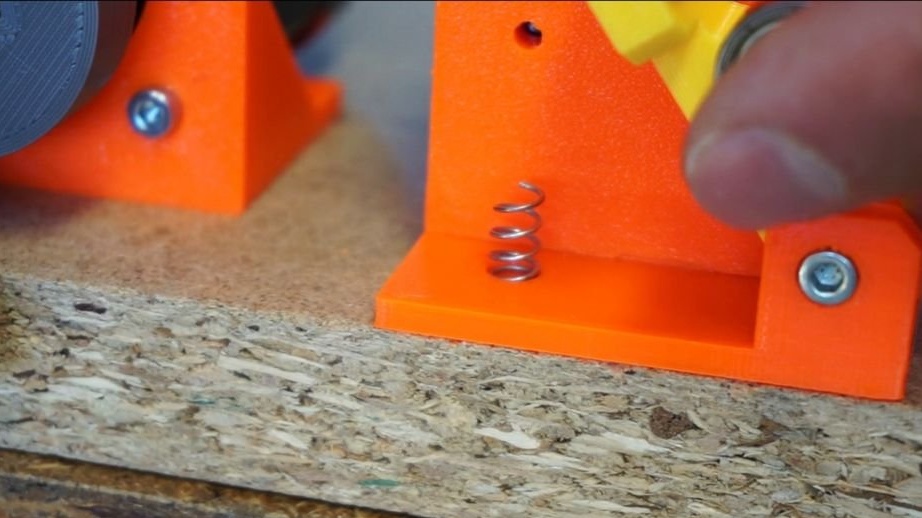
Rama jest już zainstalowana, więc pierwszym krokiem w tworzeniu mechanizmu podającego jest zbudowanie karetki dla przekładni pośredniej, która dociska drut do mechanizmu podającego. Zdejmij plastikową uszczelkę z łożyska 6x15x4 mm. Zamontować łożysko na śrubie M3x20. Zamontować nakrętkę M3 w karetce i przykręcić łożysko do śruby. Upewnij się, że łożysko obraca się swobodnie. Włóż drugą nakrętkę M3 do ramy silnika (strona silnika w lewym dolnym rogu) i wkręć karetkę przez mały wspornik za pomocą śruby M3x20. Nie dokręcaj śruby zbyt mocno; karetka musi się swobodnie poruszać. Podnieś wózek i włóż sprężynę do otworu poniżej.
Weź drugi silnik krokowy i zainstaluj go w ramie silnika. Nie wkręcaj jeszcze. Naciśnij element dystansowy mechanizmu podającego na wał silnika i zainstaluj mechanizm podający.
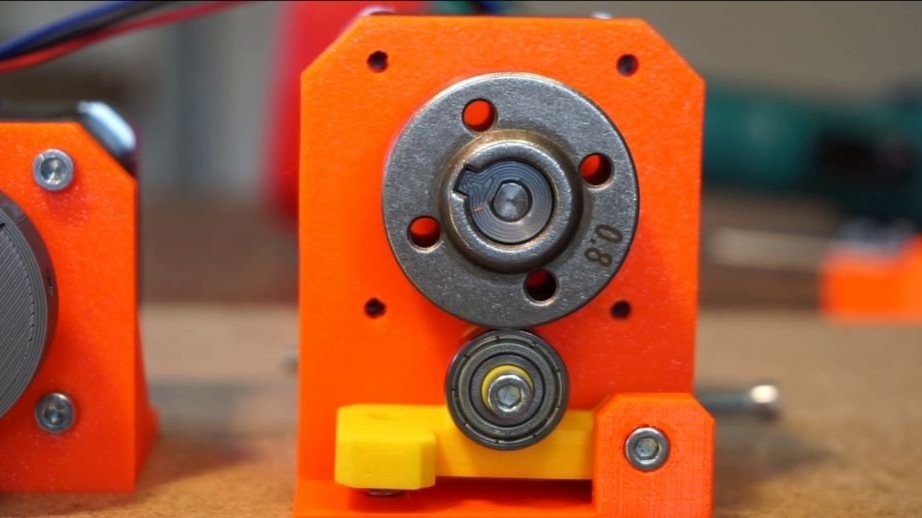
Mechanizm posuwu, z którego korzysta mistrz, jest pobierany ze spawarki MIG. Mechanizm ma dwa wgłębienia na cewce. Jeden dla drutu 0,8 mm i jeden dla drutu 1 mm. W przeciwieństwie do kół zębatych (poprzednio mistrz próbował nimi podawać drut), ten mechanizm nie pozostawia śladów na drucie.
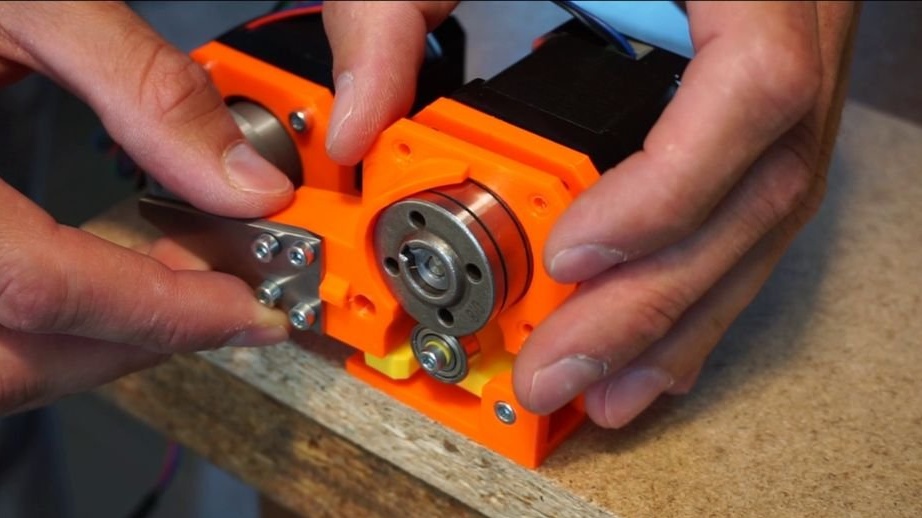
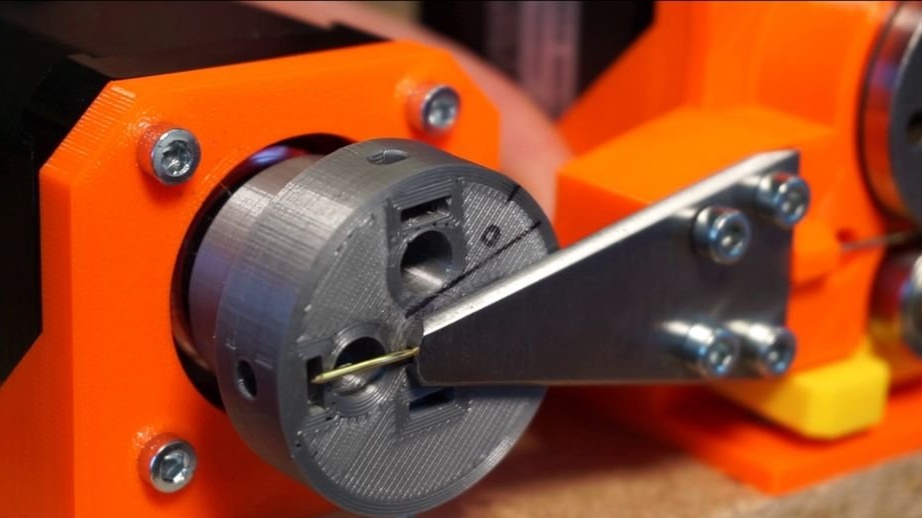
Podajnik i urządzenie do gięcia są połączone płytą do gięcia - metalową płytą o grubości 2 mm z małym rowkiem na tylnej ścianie, która podaje drut bezpośrednio do środka głowicy do gięcia, aby uzyskać idealne gięcie. Do drukowania jest plastikowa płyta do gięcia, która działa świetnie, ale zużywa się szybko i wymaga częstej wymiany. Możesz go użyć lub zrobić na nim metalową płytę.
Następnie weź plastikową część prowadnicy drutu i zainstaluj cztery nakrętki M3 w otworach z tyłu. Teraz przykręć blachę za pomocą śrub M3x20. Umieść prowadnicę drutu przed ramą silnika mechanizmu podającego i przymocuj ją do silnika za pomocą czterech śrub M3x12. Dostosuj położenie płyty gięcia. Powinien znajdować się dokładnie na środku głowicy zginającej.
Przeciągacz jest gotowy. Jeśli masz prosty drut, możesz go teraz użyć. W przeciwnym razie potrzebujesz prostownika.





Krok piąty: przeciągnij
Drut jest zwykle dostarczany w postaci cewki. Aby zgiąć drut, najpierw musisz go wyprostować. Prostownik składa się z 7 rolek (4 u góry i 3 u dołu), które można docisnąć do siebie, aby zapewnić prawidłowe napięcie drutu. Zapobiega również skręcaniu drutu podczas zginania.
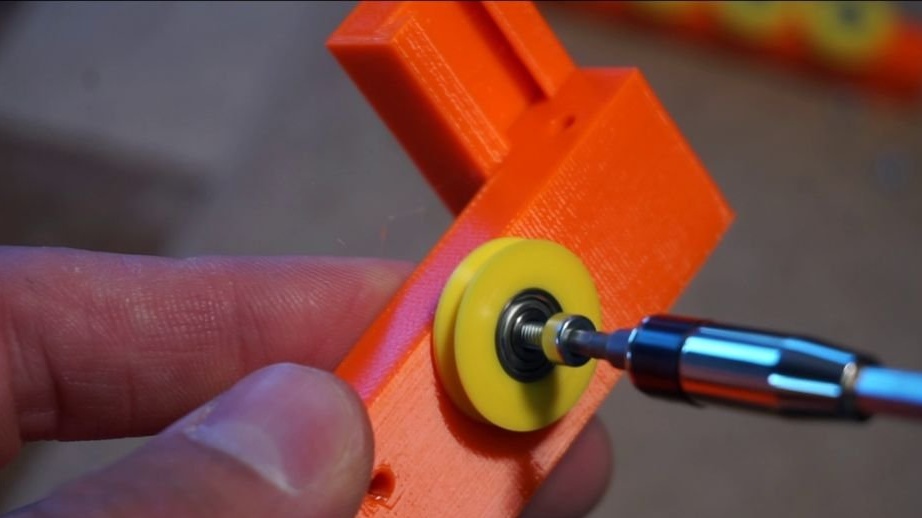
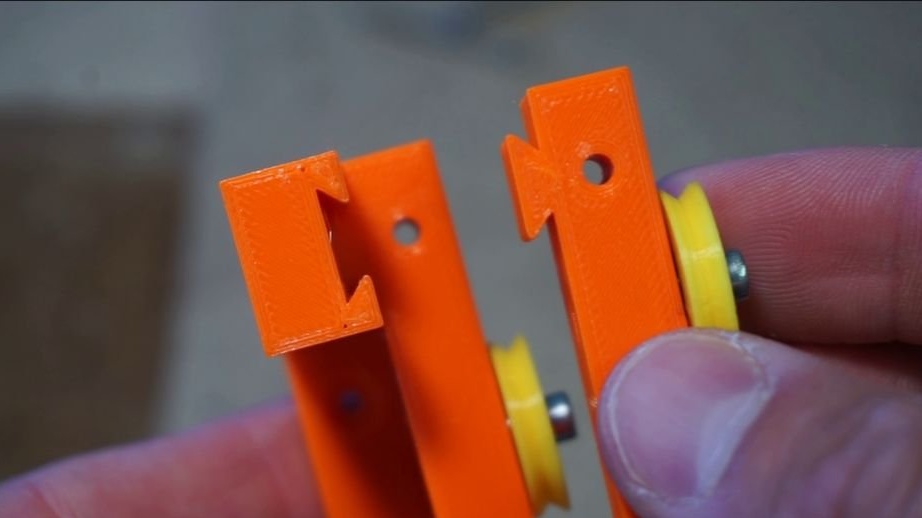
Rozpocznij montaż za pomocą rolek. Najpierw należy wcisnąć łożysko 3x10x4 mm w plastikową obudowę rolki. Włóż śrubę M3x12 po jednej stronie, a podkładkę M3 po drugiej stronie wałka. Podkładka zapobiegnie tarciu koła na ramie. Przykręć wszystkie rolki do dolnej i górnej ramy. Połącz obie ramki. Przymocuj ramy za pomocą dwóch śrub M3x40.
Możesz zaoszczędzić trochę pieniędzy na łożyskach tocznych. Wydrukuj część Straightener_RollerNoBearing zamiast Straightener_Roller. Ale wydajność będzie nieco gorsza.
Aby uzyskać jeszcze lepsze wyniki, użyj 2 prostownic z rzędu.




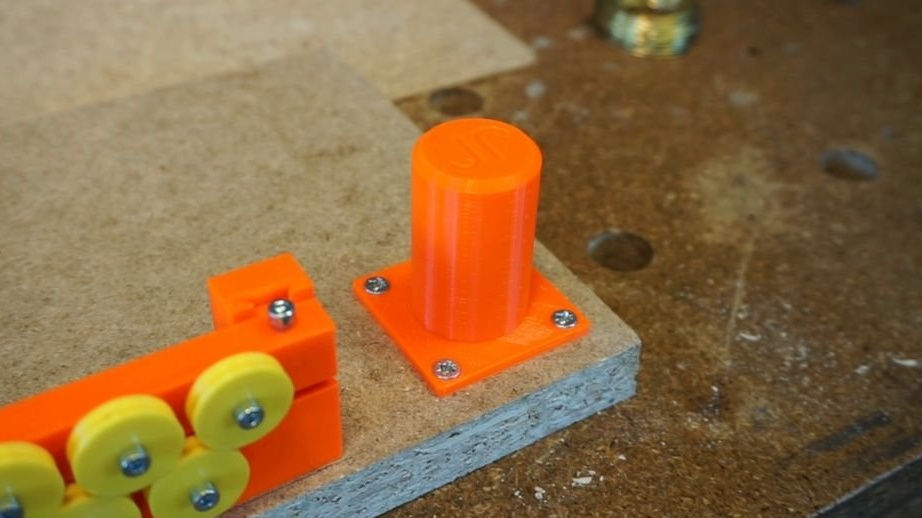
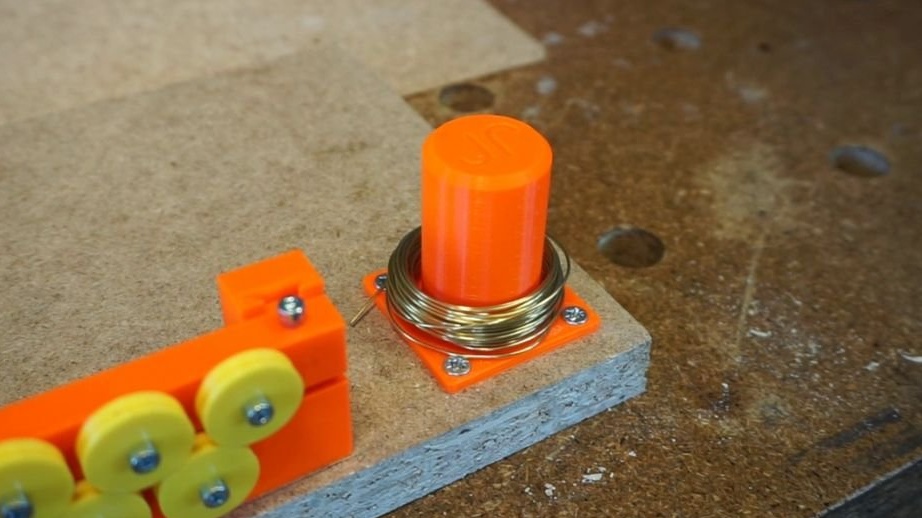
Krok szósty: uchwyt cewki
Uchwyt szpuli jest prostym cylindrem, który utrzymuje drut i umożliwia jego odwijanie się ze szpuli. Przykręć do podstawy czterema śrubami 3x16.
Krok siódmy: połącz
Najpierw drut gnący należy podać do maszyny. Mistrz używa drutu mosiężnego 0,8-1 mm w kształcie cewki.
Drut przechodzi z cewki przez rolki. Po prostu włóż drut między rolki. Potem przechodzi przez przeciągnięcie.Wyreguluj pozycję mechanizmu podającego, tak aby rynna znajdowała się równo z powierzchnią prowadnicy drutu. Naciśnij dźwignię na przekładni pośredniej i przepchnij drut przez podajnik do płyty zginającej. Zwolnij dźwignię i pozwól jej docisnąć się do mechanizmu podającego. Teraz możesz ręcznie przewijać mechanizm podajnika, aby popchnąć drut do głowicy zginającej. Ostrożnie wyreguluj napięcie rolek, dokręcając śruby. Rolki nie powinny się swobodnie obracać, ale drut powinien poruszać się płynnie.
Po drugie elektronika Kontroler musi być również podłączony. Mistrz używa klasycznego Arduino UNO z CNC i dwoma sterownikami silników krokowych A4988. Silnik posuwu jest podłączony do osi Z, a silnik głowicy zginającej do osi X. Sterowniki są skonfigurowane dla najwyższej możliwej dokładności - wszystkie 3 mostki pod sterownikami krokowymi są wstawione. Wszystko powinno być podłączone do zasilacza 12V 3A.

Krok ósmy: Oprogramowanie układowe
Teraz możesz spróbować uruchomić maszynę. Mistrz używa GRBL wraz z cncjs. Są przeznaczone do pracy na frezarce, ale świetnie sprawdzają się w każdym typie CNC. GRBL to oprogramowanie, które musisz zainstalować w Arduino UNO. Istnieje dobry klient WWW cncjs do ustawiania parametrów. Zainstaluj GRBL na Arduino i cncjs na swoim komputerze.
Po instalacji musisz połączyć się z maszyną i sprawdzić jej działanie, naciskając przyciski Z +/- lub X +/-.
Teraz musisz skalibrować: 10 mm = Z10 102 USD = 34 USD 110 = 1600 USD 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Jest to zestaw wartości, które określają sposób konwersji liczby wskazanej w kodzie na ruch silnika. Na przykład, jeśli ustawisz oś Z na 30, oznacza to, że przepchnie on 30 mm drutu przez podajnik.
Wyliczyliśmy kalibrację, teraz musisz ustawić głowicę gnącą w pozycji zerowej.
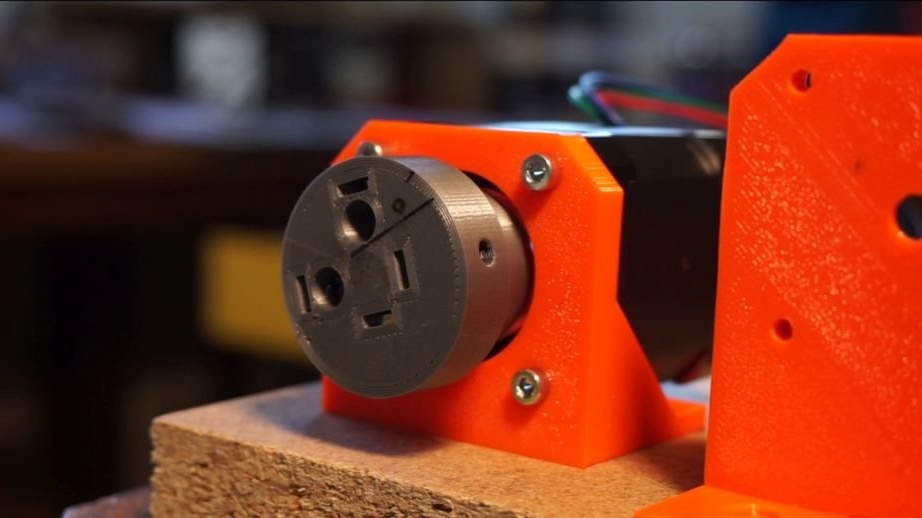
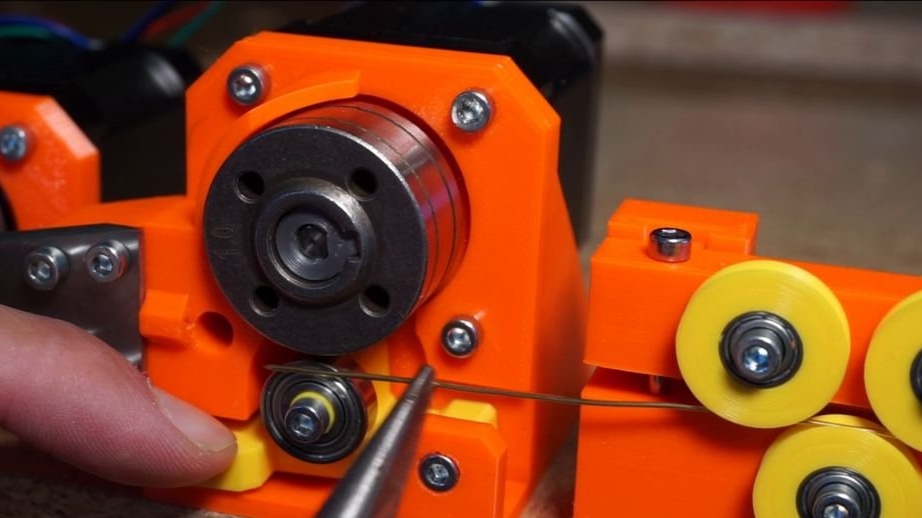
Ruch głowicy zginającej jest określany przez dobrze znane stałe położenie głowicy zginającej. W tym przypadku jest to pozycja, w której kołek zginający na głowie jest skierowany w lewo. Zobacz zdjęcie
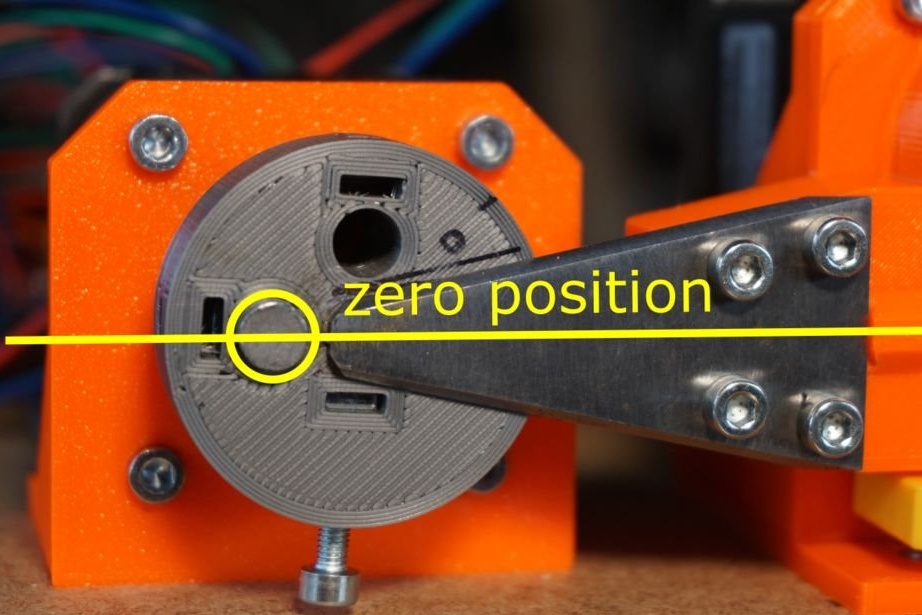
Wskazane jest zanotowanie tej zerowej pozycji na głowie, aby móc przywrócić ją do tej samej pozycji. Mechanizm posuwu nie musi określać pozycji zerowej, ponieważ zawsze porusza się względem bieżącej pozycji.
Teraz spójrzmy na przykład Gcode. Wygląda to tak:
G91
G1 Z1
G90
G1 X2
G1 X-6Oto, po co jest napisana każda wartość:
G91 - użyj współrzędnych względnych (wymaganych przed każdym ruchem wzdłuż osi Z)
G1 Z1 - podaj drut 1 mm
G90 - użyj bezwzględnych współrzędnych (wymagane przed każdym ruchem wzdłuż osi X)
G1 X2 - obróć głowicę gnącą do pozycji 2 (ta liczba nie zawiera jednostek)
G1 X-6 - obróć głowicę gnącą do pozycji -6
Jeśli powtórzysz kroki 100 razy, otrzymasz kod sprężystego zgięcia. Więcej plików źródłowych można znaleźć poniżej.
hex-inner.gcode
hex-outer.gcode
kod wiosenny
Maszyna jest gotowa. Ale mistrz nadal będzie pracował nad poprawą.
Cały proces produkcji takiej maszyny można zobaczyć na filmie.