


W tym artykule Kreator pokaże nam, w jaki sposób stworzył działającego śmigłowca Arctic Air Transport Lego 60193 model kwadrokopter. Głównym zadaniem przy produkcji kwadrokoptera, oprócz cech latania, było uratowanie jak największej liczby oryginalnych części.
Zobaczmy krótki film pokazujący działanie kwadrokoptera.
Tak więc, do produkcji takiego kwadrokoptera mistrz zastosował następujące
Narzędzia i materiały:
-Lego City Arctic Helicopter - 60193:
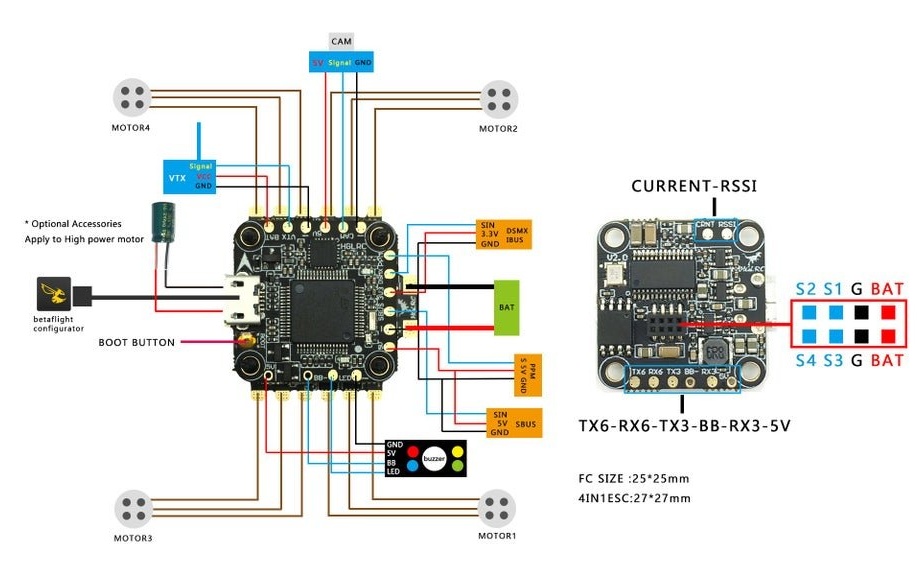
- Kontroler i ESC 20x20 mm, na przykład HGLRC XJB F428 Micro F4 AIO OSD;
- Silniki bezszczotkowe - 4 szt;
Śmigła
-Bateria 950 mAh;
-Złącza;
-Wire;
-Radio moduł (nadajnik i odbiornik);
- łączniki;
-Nóż;
-Lutownica;
-Klej pistoletu;
- śrubokręt;
-Drill;
Krok pierwszy: Lego Build
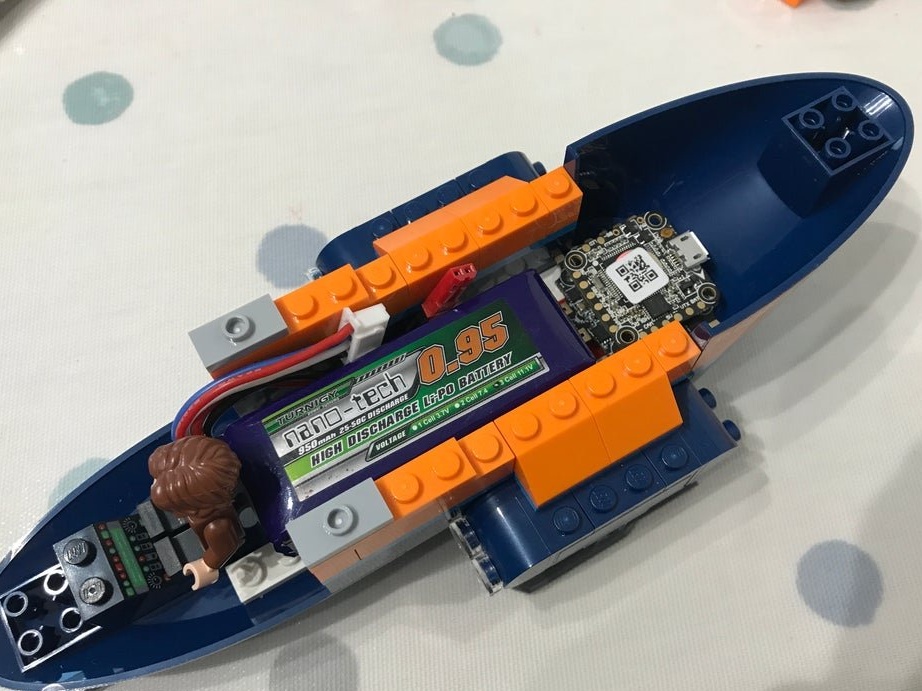
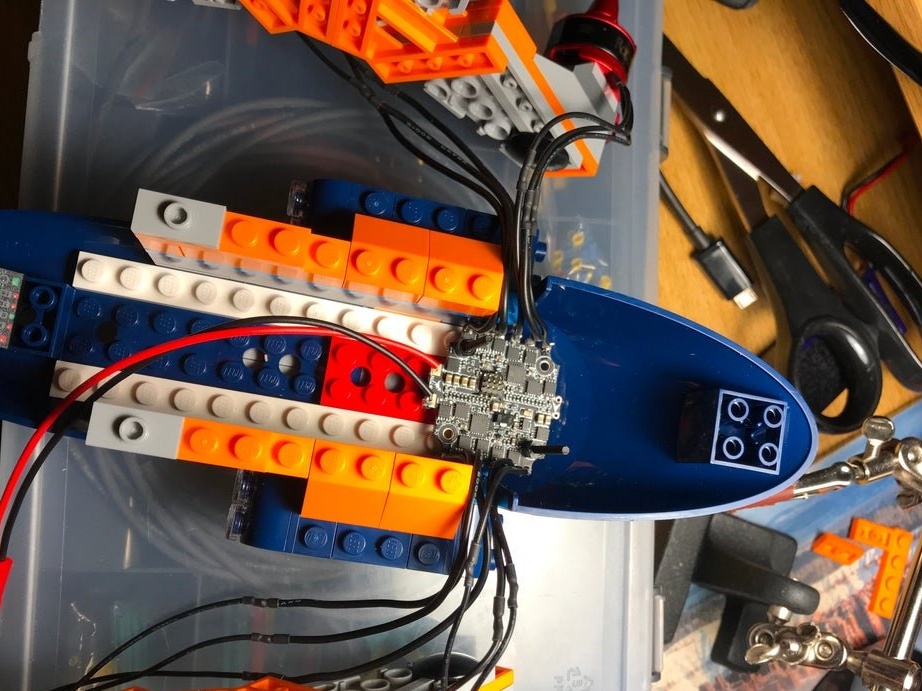
Najpierw mistrz zbiera LEGO-Arctic. Następnie model jest częściowo demontowany. Wewnątrz musisz umieścić baterię i kontroler, obserwując równowagę modelu.


Krok drugi: mocowanie silnika
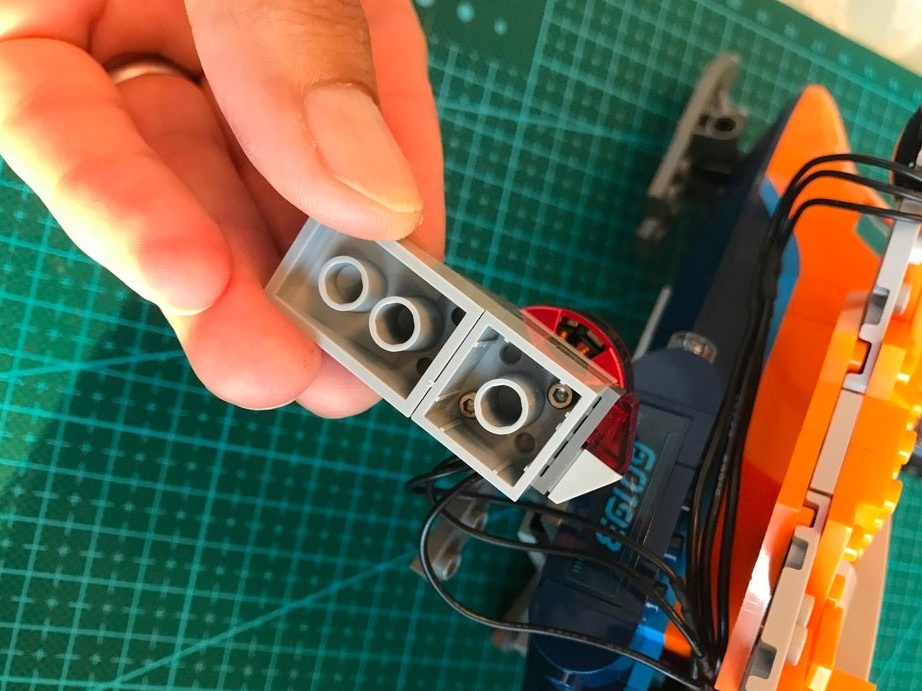
Otwory montażowe dla standardowego silnika bezszczotkowego 1806 są prawie takie same jak kołki na standardowej płycie LEGO 2x2. Każde mocowanie „silnika” na kwadrokopterze ma ciemnoszare płytki 2x2 (LEGO 3022) i jasnoszare płytki 2x2 z pionową szpilką (LEGO 2460), które zwykle są trzymane na piastach śmigła LEGO na górze.
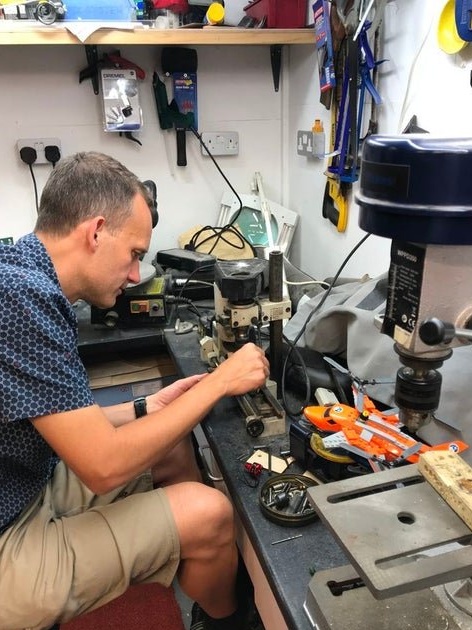
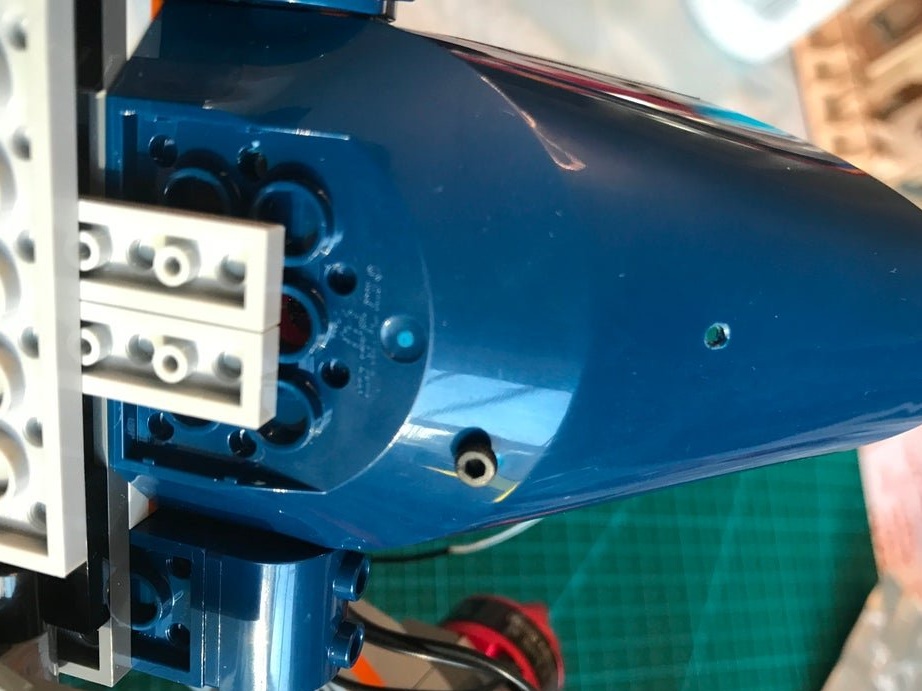
Mistrz wierci otwory montażowe. Na silnikach, pośrodku jest odpływ. Otwór pod nim jest wiercony na środku płytki. Zabezpiecza silniki.








Krok trzeci: ramiona
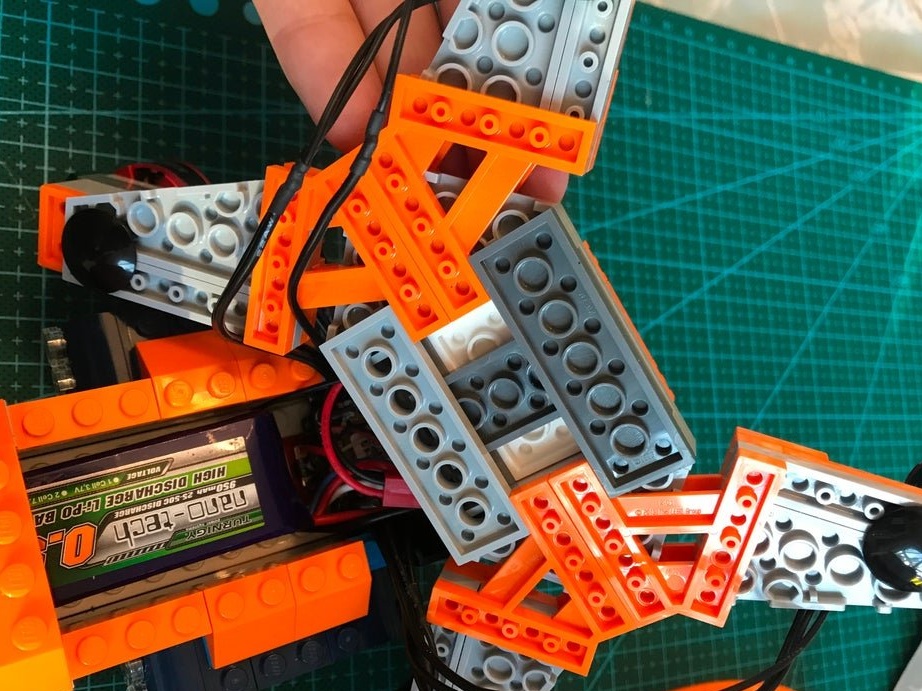
Przestawiając „ramiona” kwadrokoptera, można nieznacznie zmienić układ, aby zapewnić szerszy lub węższy układ silników i rozmieszczenie śrub względem siebie.
Standardowy zestaw LEGO (pierwsze zdjęcie) ma „ramiona” i silniki umieszczone szeroko (poziomo) z dość dużym nakładaniem się śrub. Mistrz przerabia „ramiona” i wykonuje silnik i odpowiednio śruby.



Krok czwarty: elektronika
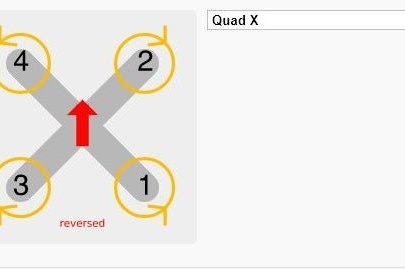
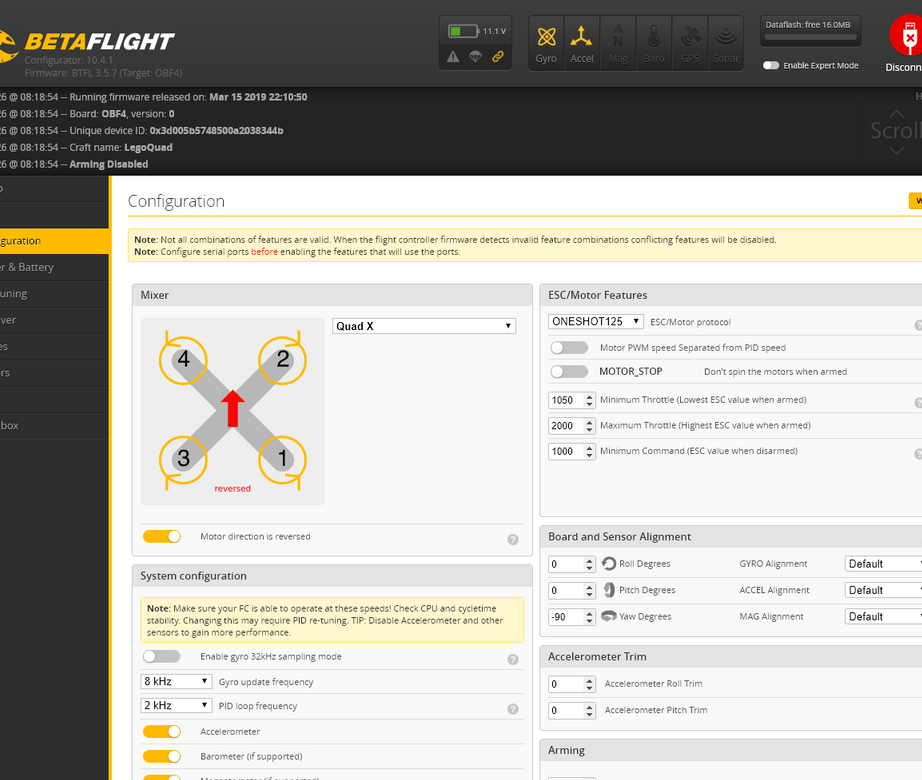
Zgodnie ze schematem instaluje elektronikę. Pierwsze zdjęcie pokazuje schemat kierunku obrotów silników. Kierunek obrotu można również zmienić na etapie programowania.

Po zakończeniu instalacji i przed podłączeniem akumulatora kreator sprawdza połączenia, aby zapobiec pęknięciu lub zwarciu.
Po włączeniu zasilania powinieneś zobaczyć światła na kontrolerze lotu i kilka sygnałów dźwiękowych z ESC.
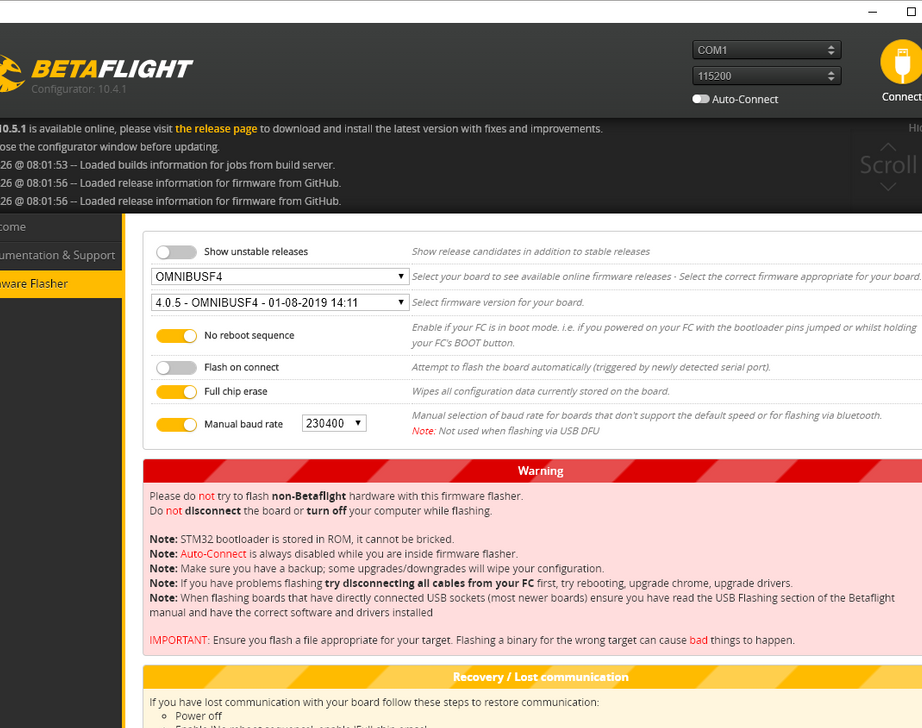
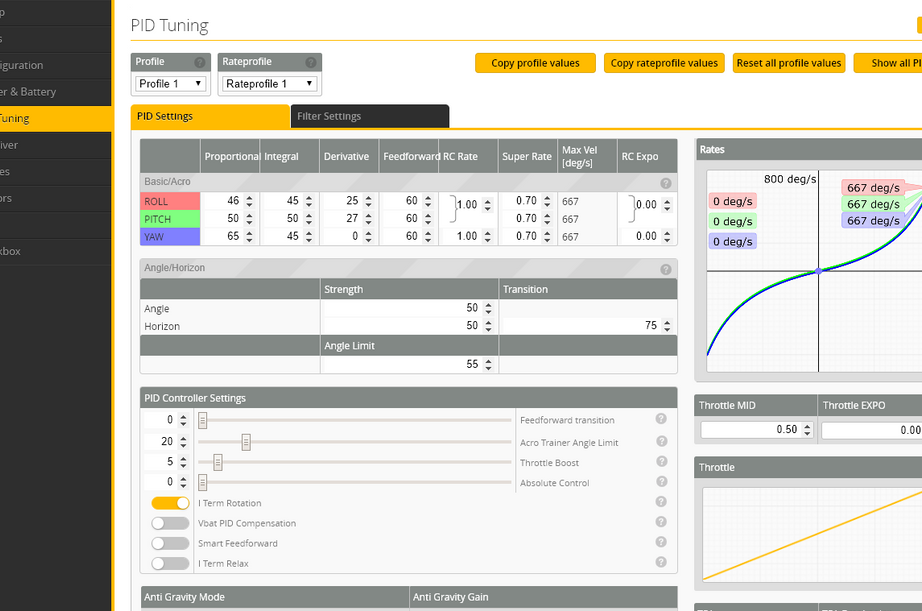
Krok piąty: Konfiguracja
Teraz, gdy wszystko jest podłączone, czas skonfigurować sterownik.Oznacza to pobieranie oprogramowania (oprogramowania wbudowanego), które wykonuje zadanie dekodowania sygnałów sterujących z nadajnika RC, przetwarzania sygnału wejściowego czujnika (akceleratora, żyroskopów) i dostarczania sygnałów sterujących dla ESC w celu obracania silników z określoną prędkością.
Zdejmij śmigła dla bezpieczeństwa! Bateria nie jest wymagana przez kilka pierwszych kroków konfiguracji, tylko zasilanie USB.
Pobierz Beta Configurator
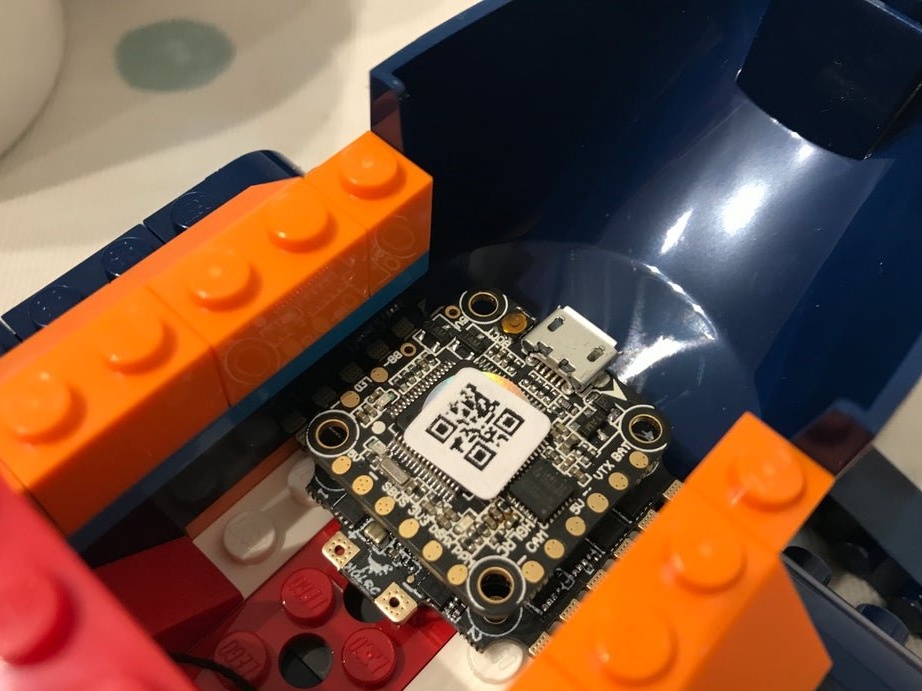
Podłącz kabel micro USB do kontrolera lotu. Należy pamiętać, że może to być łatwiejsze, jeśli kontroler nie jest przykręcony do ramy montażowej.
Pobierz i prześlij odpowiednie oprogramowanie wewnętrzne kontrolera lotu.
betaflight-settings-legoquad.txt
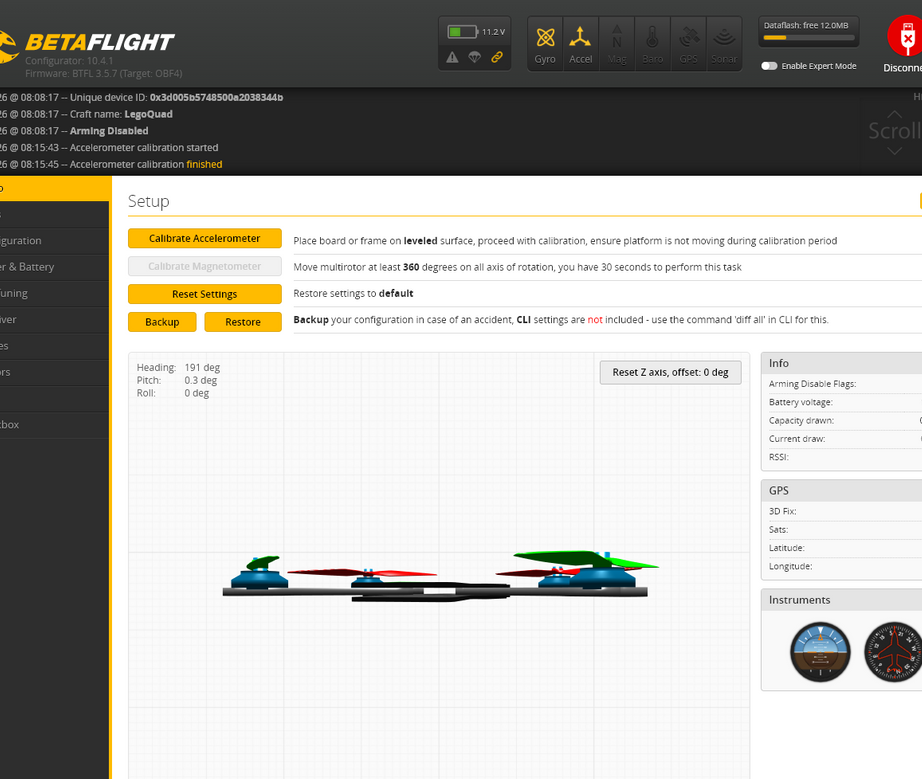
Kliknij przycisk „Połącz” i skonfiguruj następujące ustawienia:
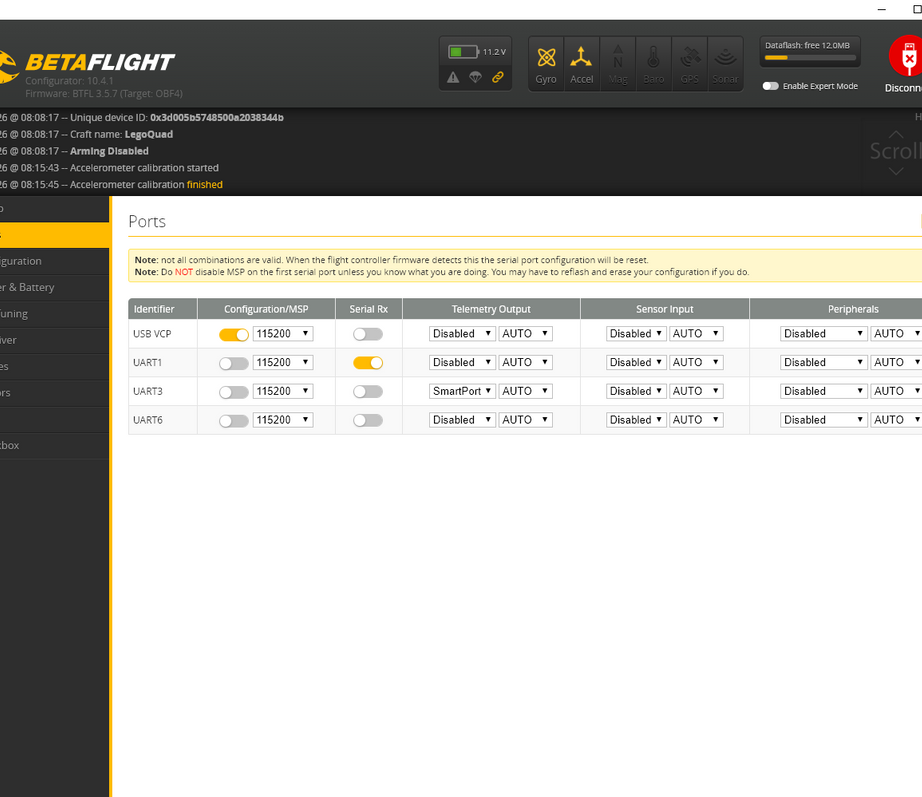
1. Konfiguracja - wzorcowanie modeli silników
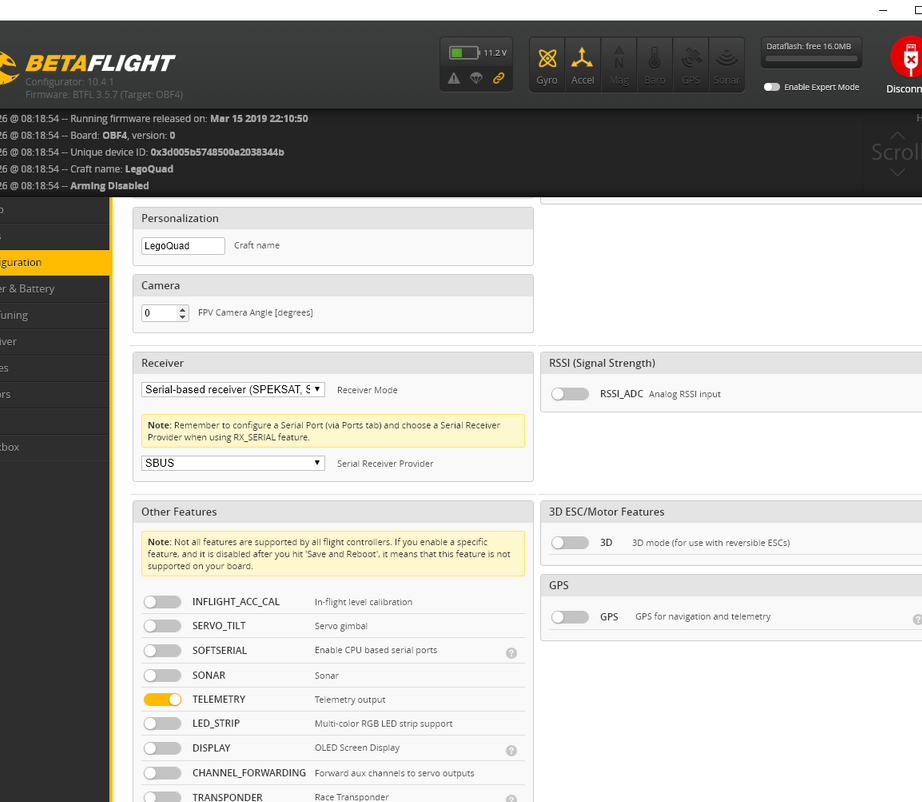
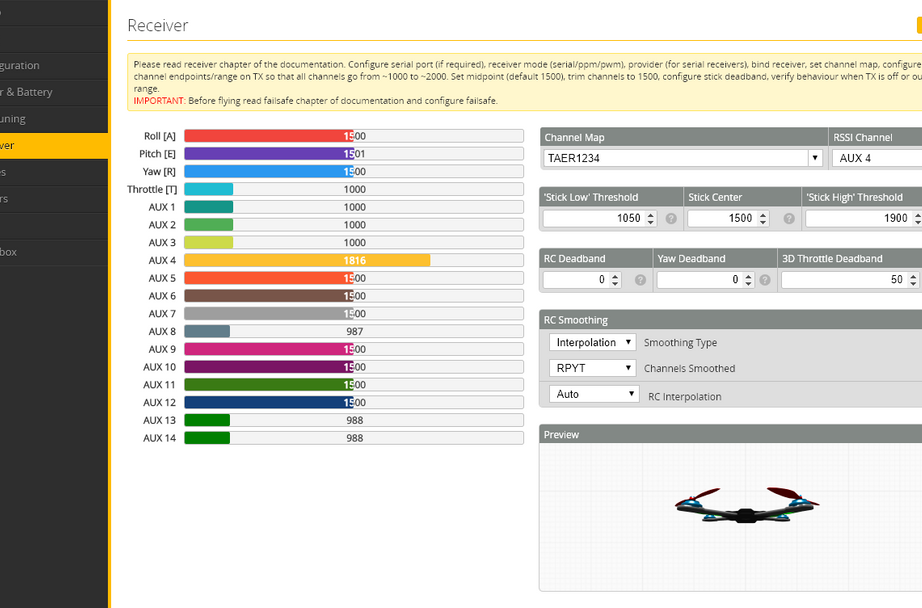
2. Określ porty - UART1 - Szeregowy RX do podłączenia odbiornika SBUS RC
3. Zapisywanie i ponowne uruchamianie
4. Nawiąż połączenie między odbiornikiem a nadajnikiem
5. Przeciążenie
6. Wartość dla wzorca PID jest ustawiona na 250
7 Podłącz akumulator
8. Dostosuj napięcie.
9. Upewnij się, że wyświetlanie kanału i kierunek sterowania są prawidłowe, gdy wszystko jest skonfigurowane, obraz modelu quadkoptera w prawym dolnym rogu powinien poruszać się we wszystkich prawidłowych kierunkach podczas przesuwania joysticków na kontrolerze RC.
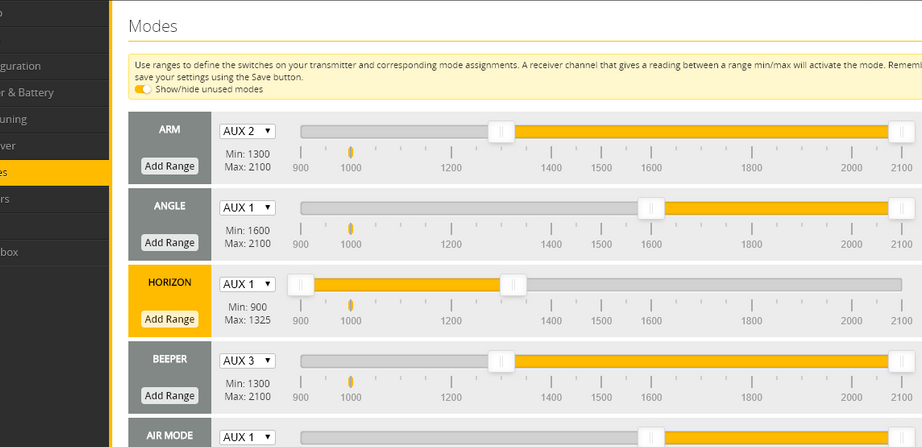
Konfiguruje tryby.
ARM wł. / Wył
HORIZON samopoziomujący / ACRO do tradycyjnego lotu FPV
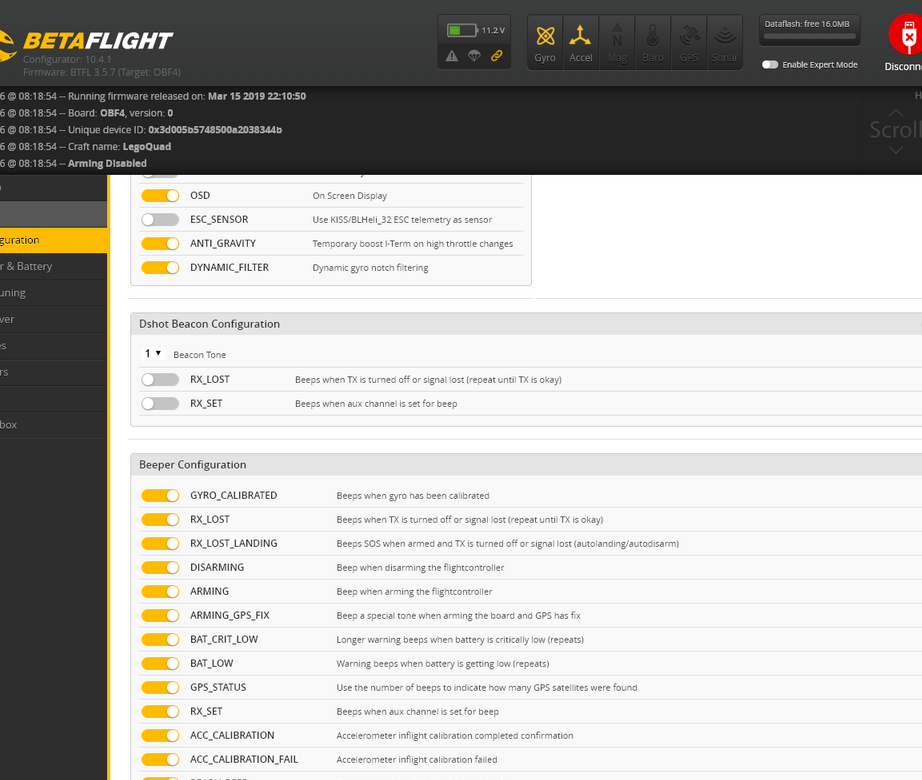
BEEPER - Przydatny, jeśli zgubisz model w wysokiej trawie lub krzakach.
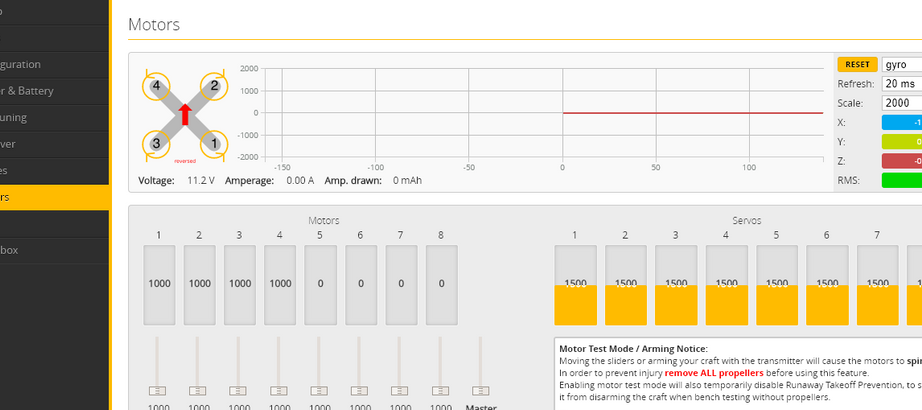
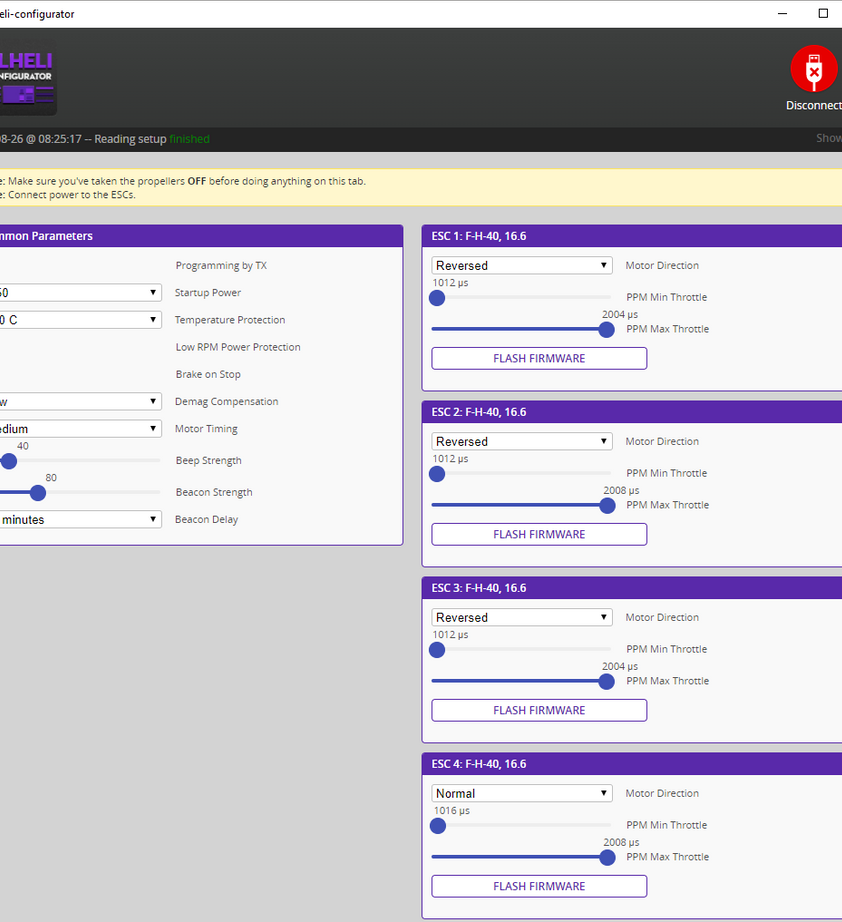
Karta „Silniki” - użyj tej opcji, aby sprawdzić każdy silnik osobno i, co ważne, zaznaczyć kierunek obrotu każdego z nich
Popraw nieprawidłowy kierunek obrotu za pomocą konfiguratora BLHELI
Po wykonaniu wszystkich tych czynności możesz odłączyć USB i akumulator, a następnie włączyć zasilanie i sprawdzić, czy wszystko działa:
Włącz nadajnik i zasilanie
Podłącz akumulator i zamontuj kwadrokopter na płaskiej powierzchni
Włącz przełącznik ARM, a silniki powinny zacząć wirować z małą prędkością.
Sprawdź przepustnicę, zwiększając prędkość
W trybie poziomym spróbuj przechylić kwadrokopter i upewnij się, że silniki odpowiednio reagują, na przykład przechyl go do przodu, a przednie silniki przyspieszą.

Krok szósty: Zgromadzenie końcowe
Praktycznie cała konstrukcja obudowy utrzymywana jest za pomocą zamków montażowych. Mistrz używa wyłącznie kleju topliwego do montażu silników.


Wszystko jest gotowe i możesz przetestować.



