
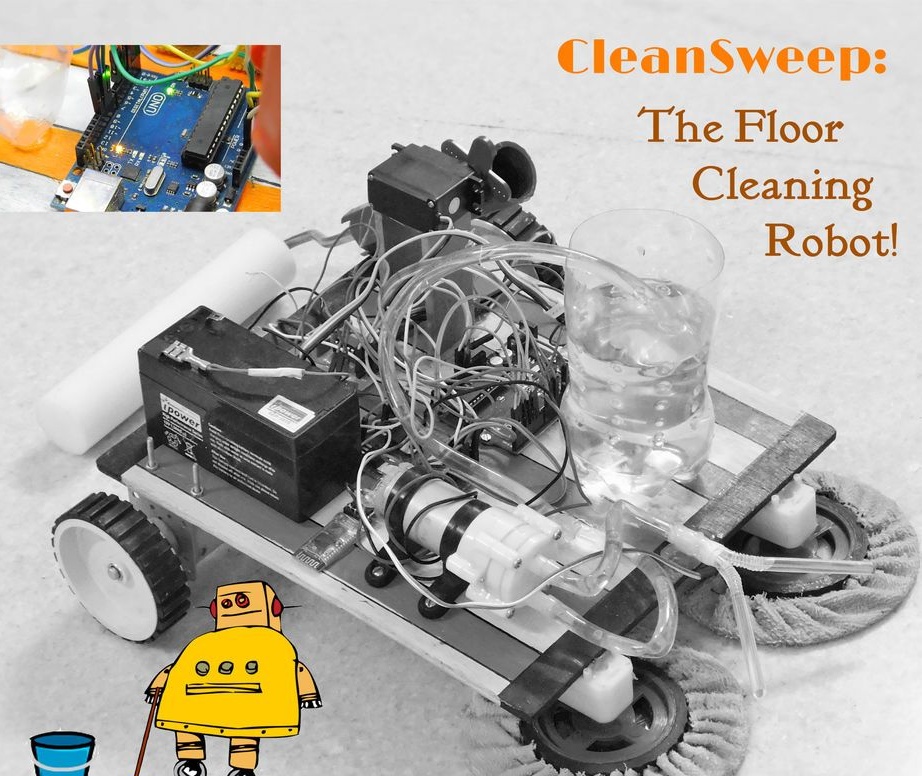


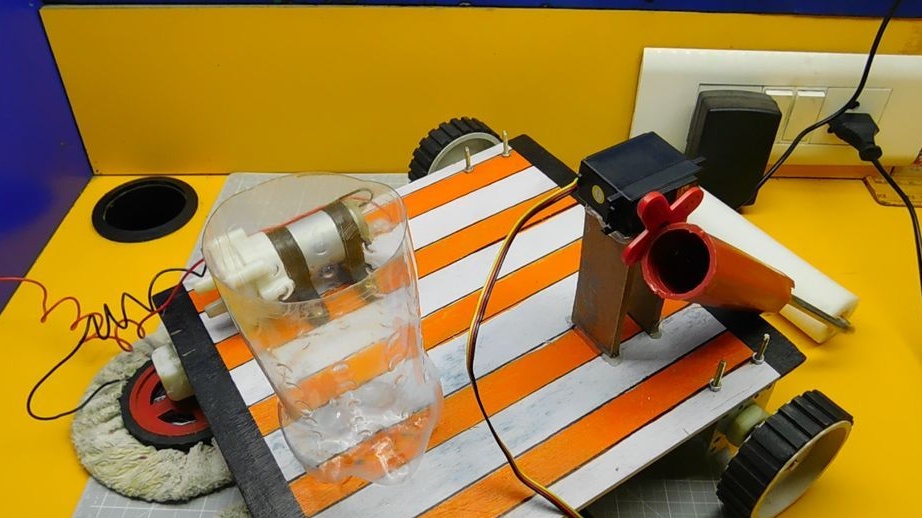
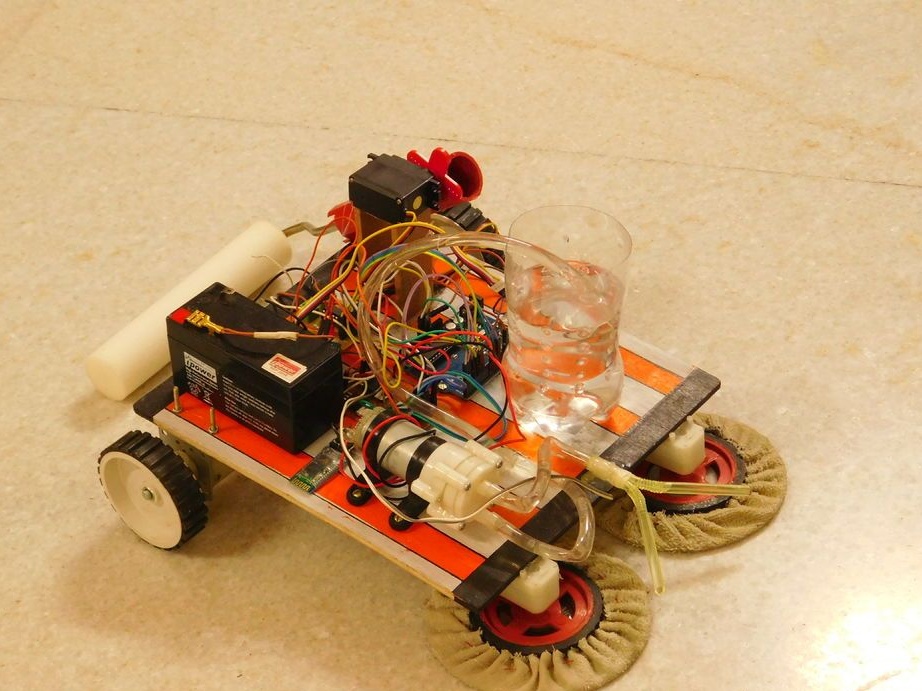
RobotKombajn ma w swoim arsenale dwie obrotowe szczotki zamontowane z przodu wału motoreduktora. Skrzynia biegów obraca się z prędkością 75 obr./min. Robot ma na pokładzie zbiornik wody. Rolka jest przymocowana z tyłu robota. Robot jest mieszany za pomocą kół zamocowanych na osi motoreduktora. Odkurzacz jest kontrolowany przez smartfon za pomocą bluetooth. W przyszłości Master planuje uczynić robota w pełni autonomicznym. Zobaczmy, jak działa to urządzenie.
Narzędzia i materiały:
- Silnik przekładni 100 obr / min -2 szt;
-Kółka do silnika -2 szt .;
-Reduktor silnika z kołem 75 rpm - 2 szt .;
-Arduino UNO;
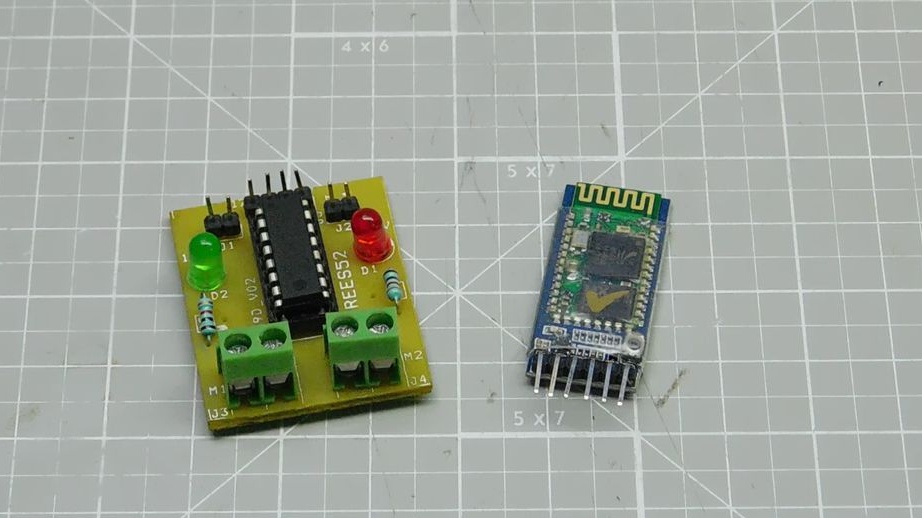
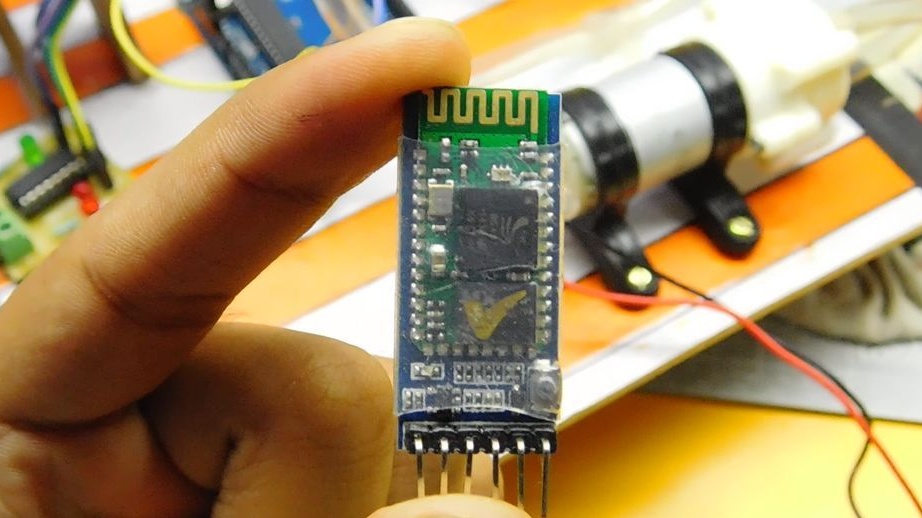
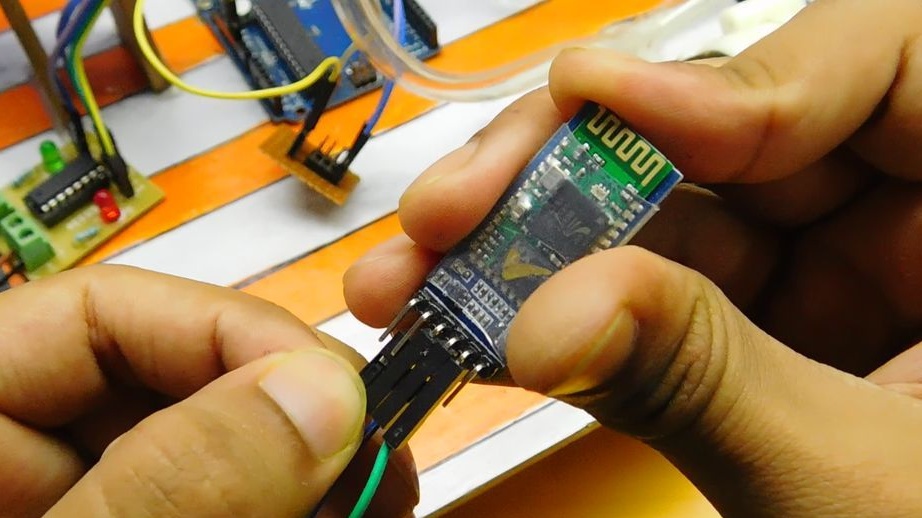
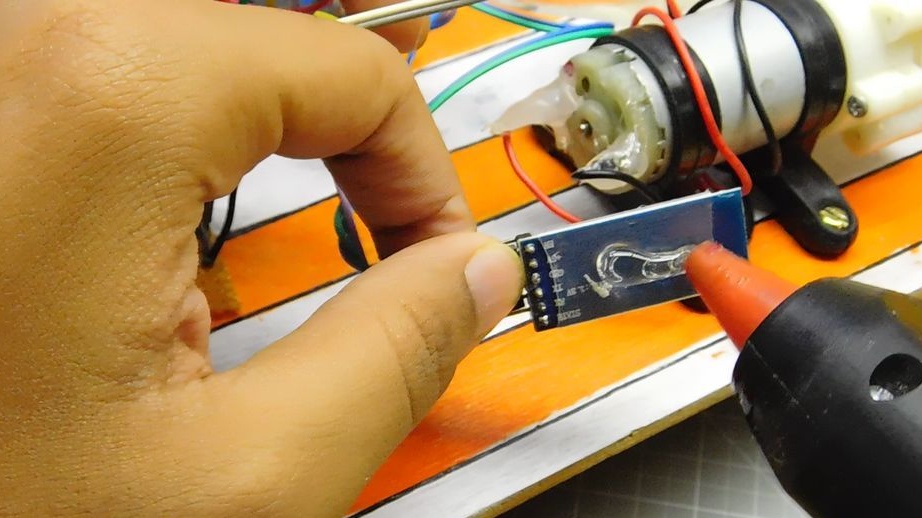
- moduł Bluetooth HC-05/06;
-Driver L293D;
- siłownik (obrót o 180 stopni);
-12 V bateria;
- Pompa 12 V;
Tranzystor TIP31C;
Tranzystor TIP122;
- napęd CD - 2 szt .;
- Wałek malarski;
- serwetki;
- Igła z nitką;
-Tube;
-Wire;
- Swetry;
-Płyta montażowa;
- łączniki;
-Sklejka;
-Plastikowa butelka;
-Lutownica;
-Klej pistoletu;
-Drill;
- szczypce;
-Dremel;
- szczotka;
-Malarstwo;
-Marker;
- nożyczki;











Krok pierwszy: Podstawa
Ze sklejki wycina się podstawa. Rozmiary podstawy to 30 * 22 cm. Maluje podstawę. Z jednej strony naprawia motoreduktor. Współosiowo mocuje motoreduktor po drugiej stronie podstawy.



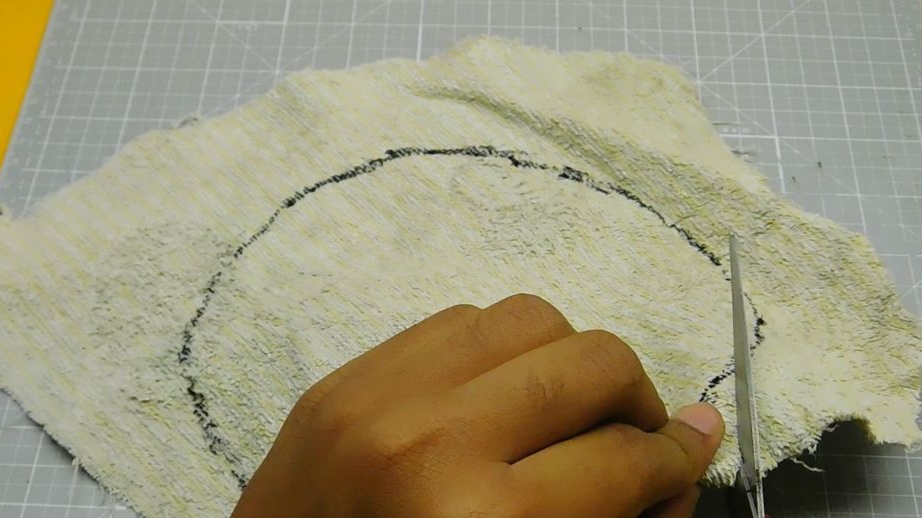
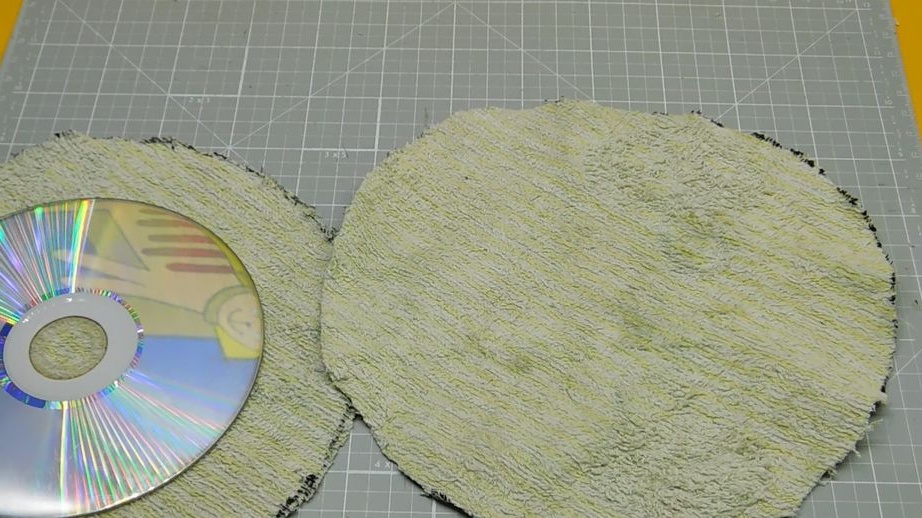
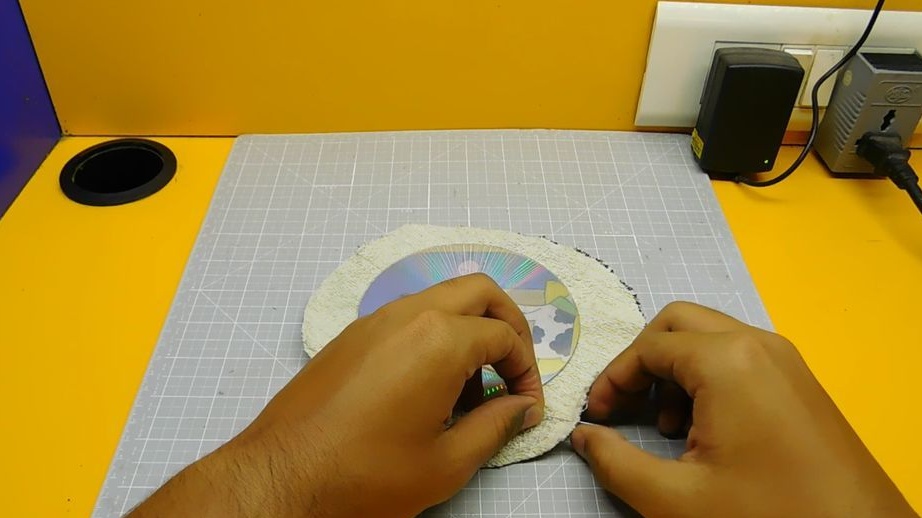
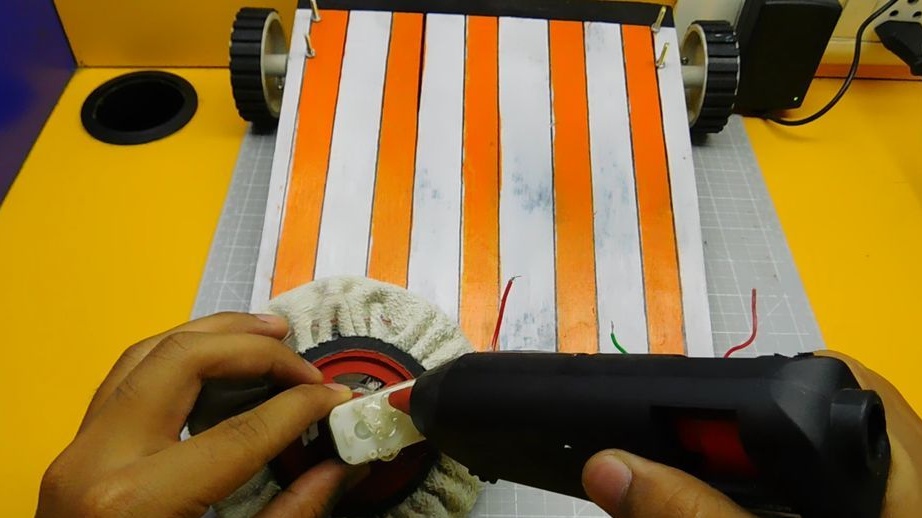
Krok drugi: pędzle
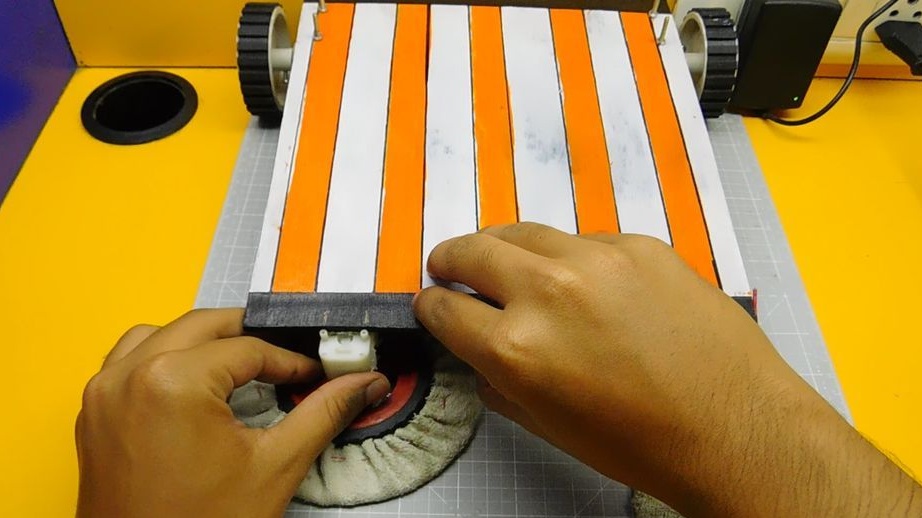
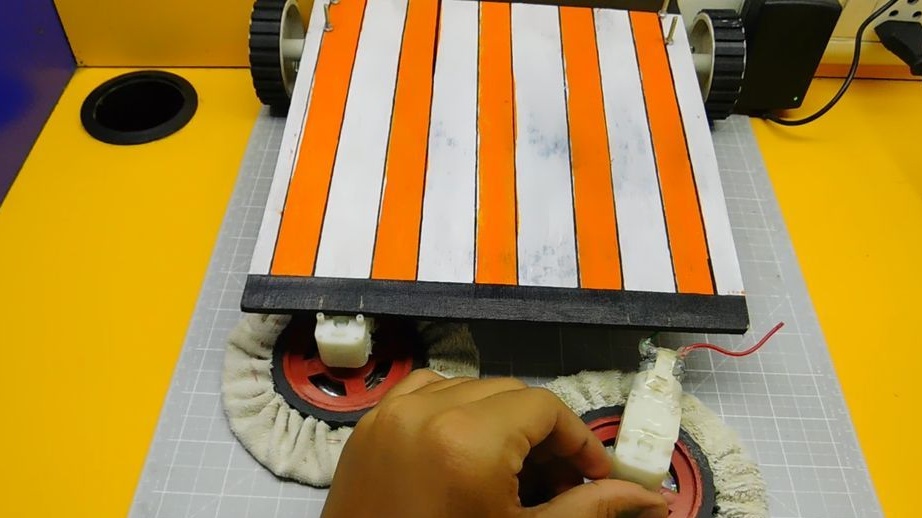
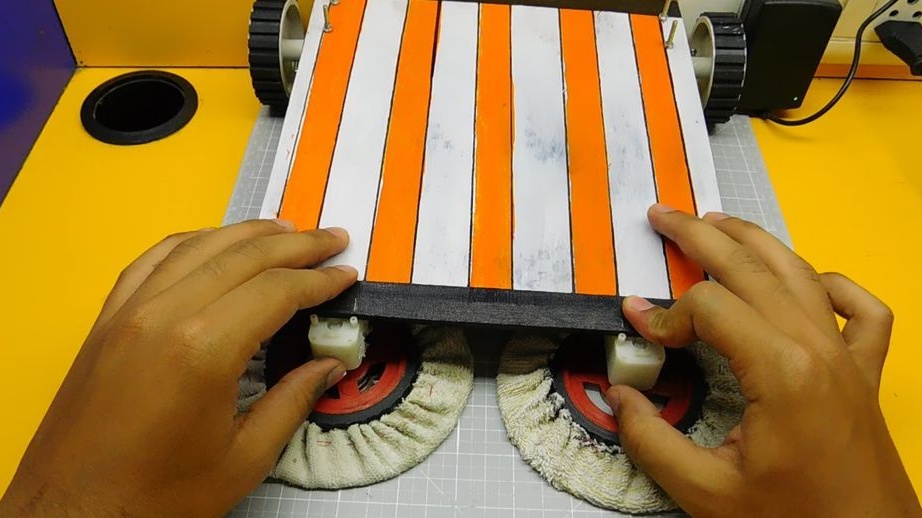
Mistrz wykonał pędzle ze starych płyt CD. Wytnij szmatkę. Schował napęd. Powtarzana operacja z innym dyskiem. Zabezpiecz tarcze klejem topliwym na kole motoreduktora. Zabezpieczono oba motoreduktory przed platformą.








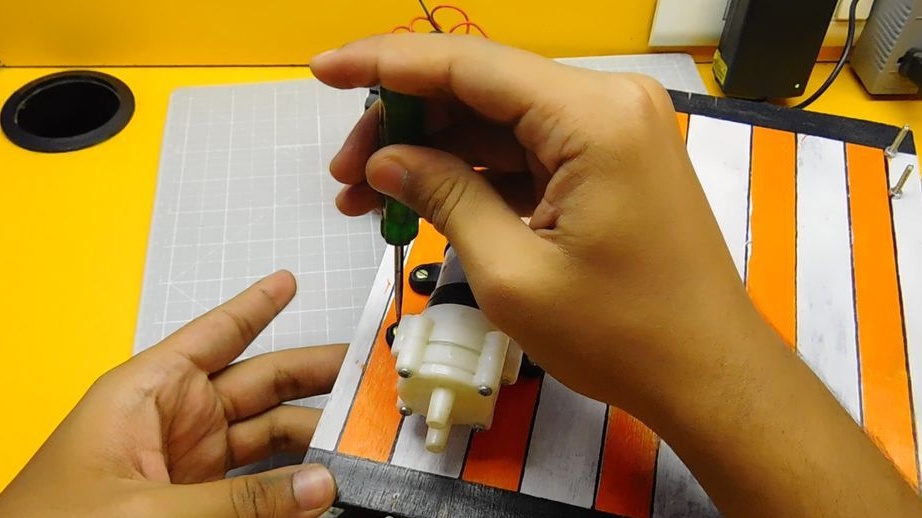
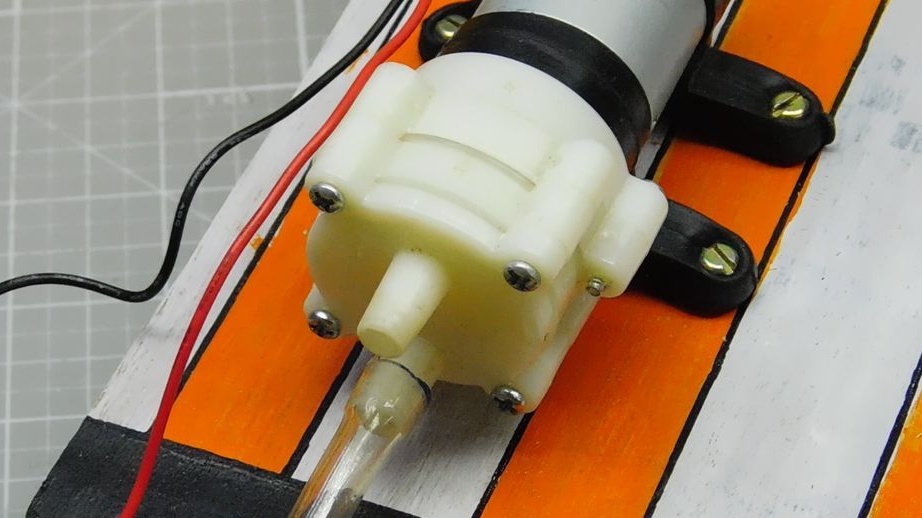
Krok drugi: Zaopatrzenie w wodę
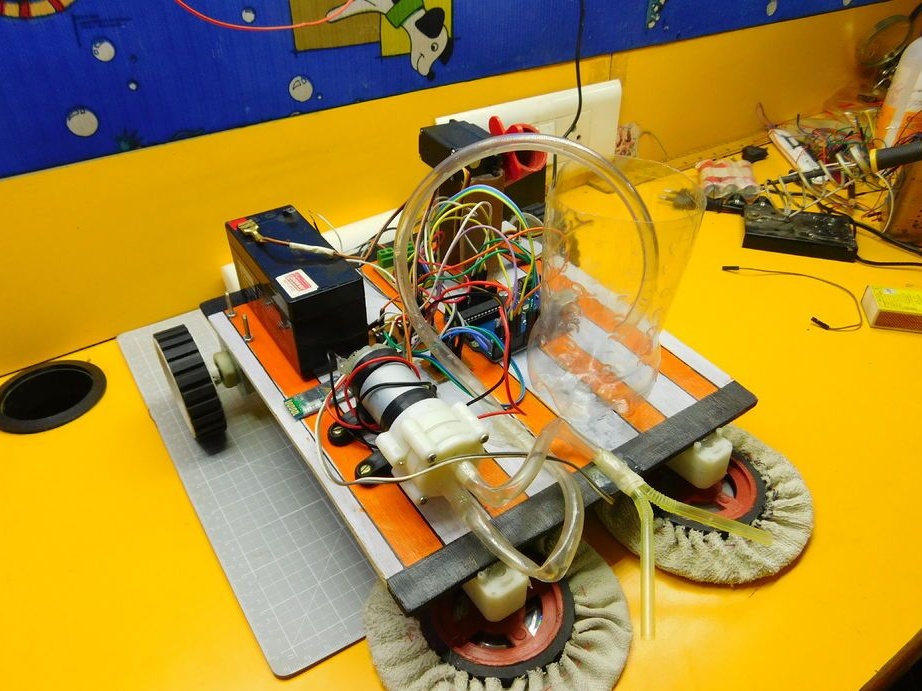
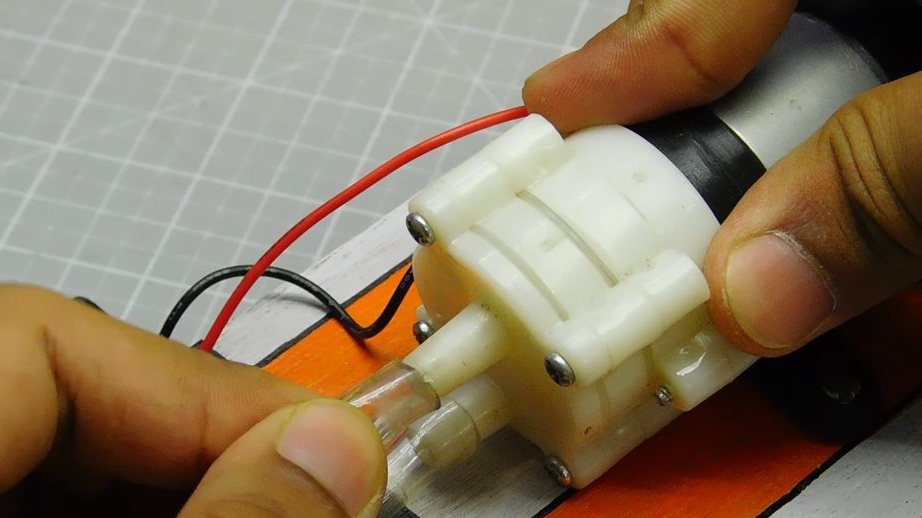
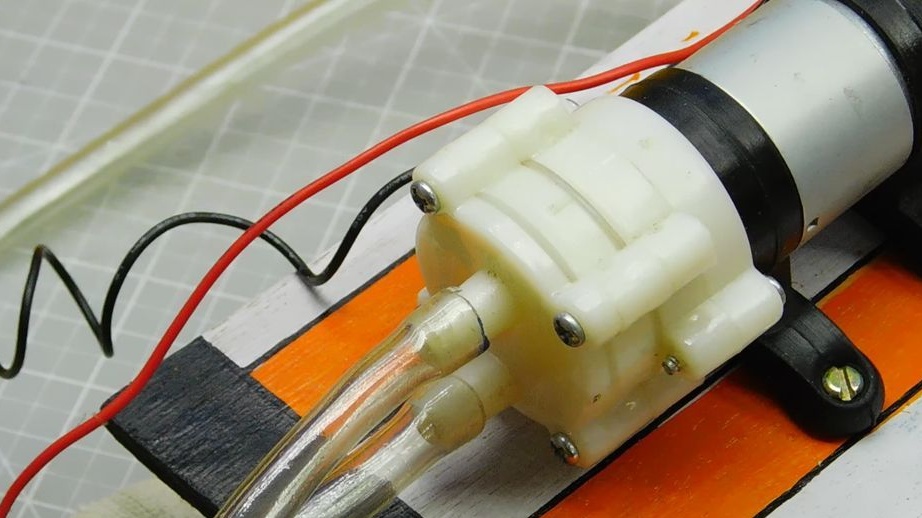
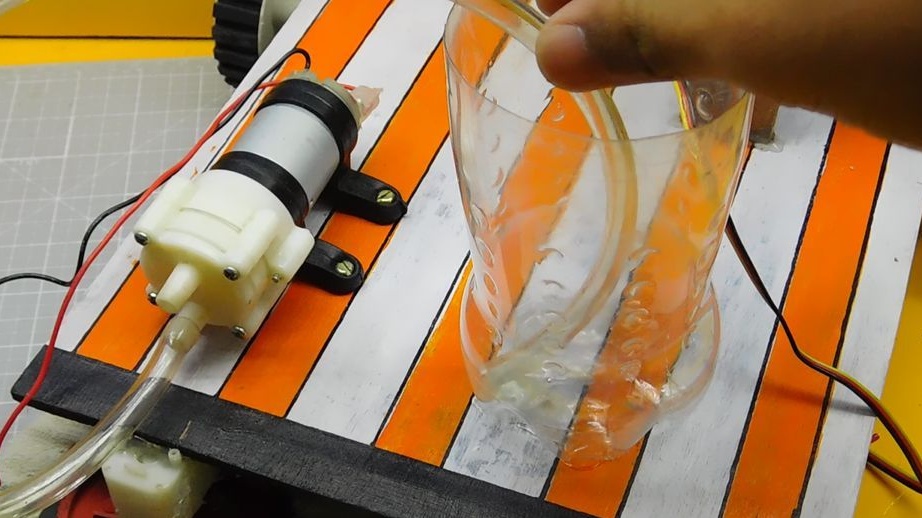
Zabezpiecza pompę na platformie. Odcina górną część plastikowej butelki. Zabezpiecza butelkę na platformie. Instaluje rurę wlotową wody. Później rura doprowadzająca wodę do szczotek zostanie naprawiona.




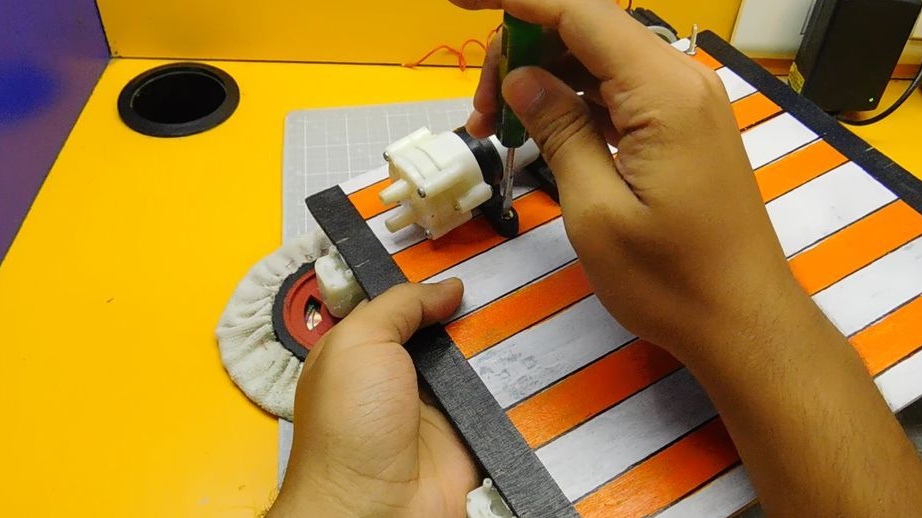
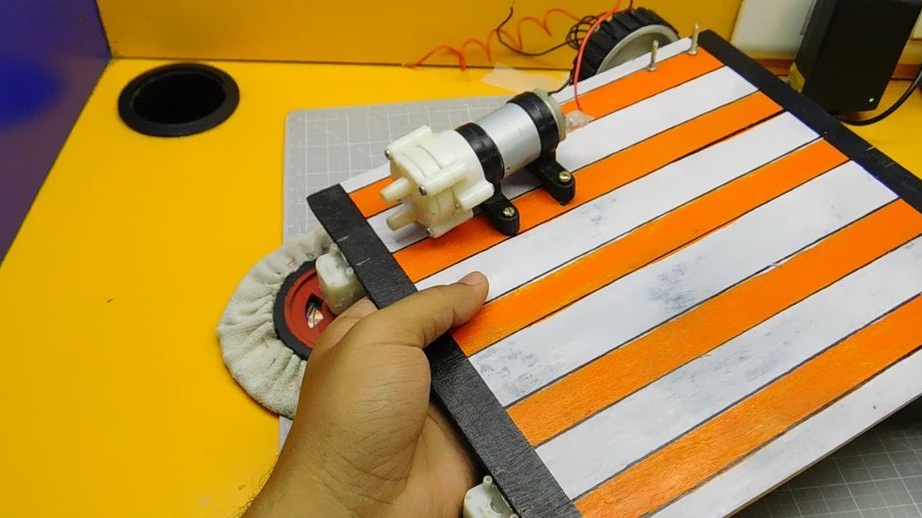




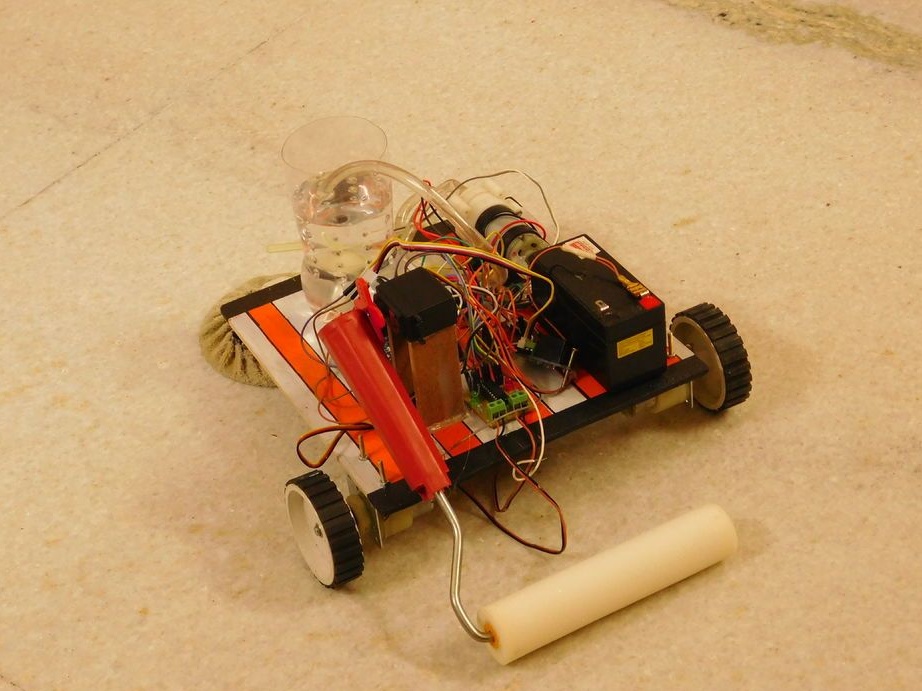
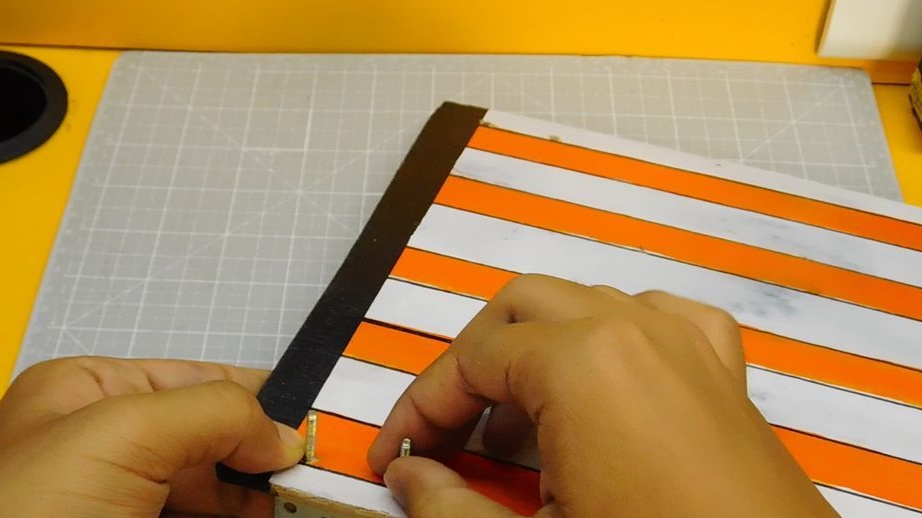
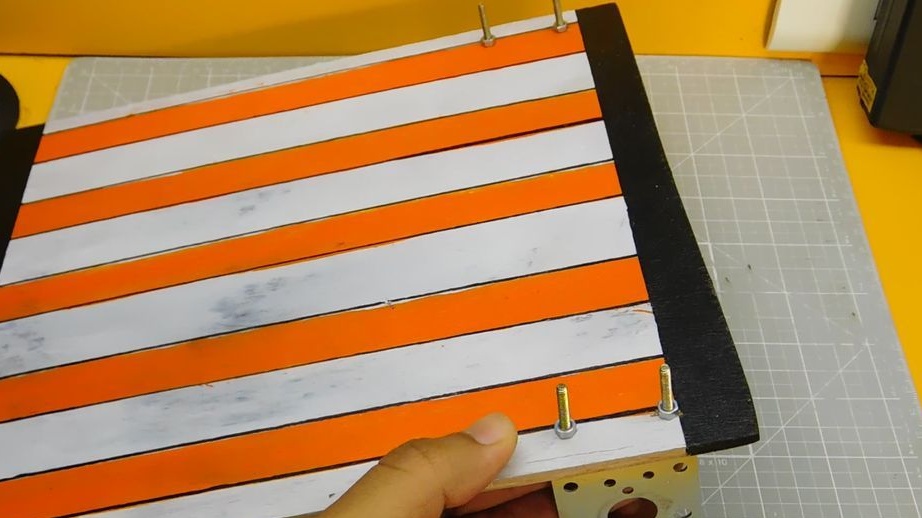
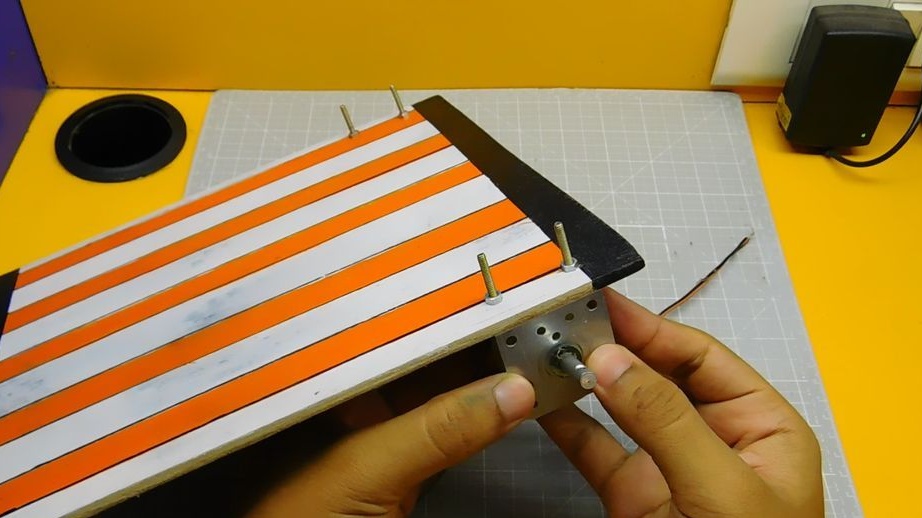
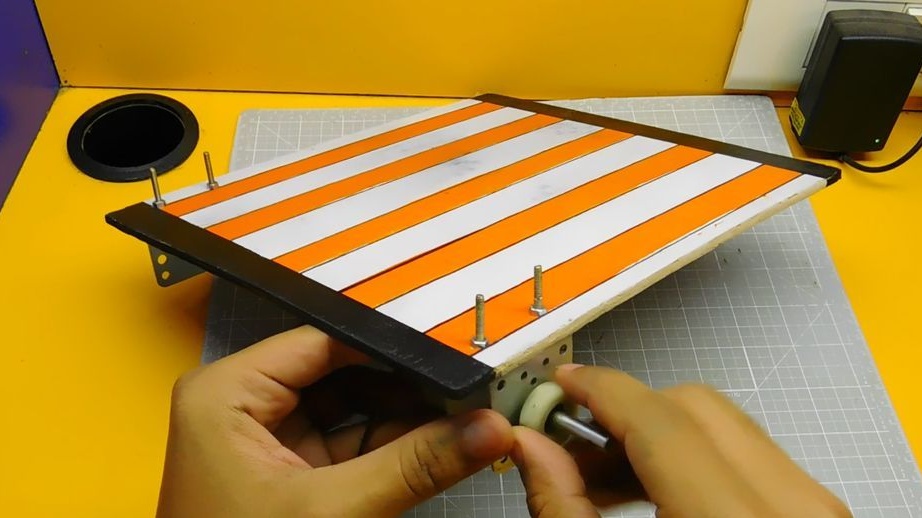
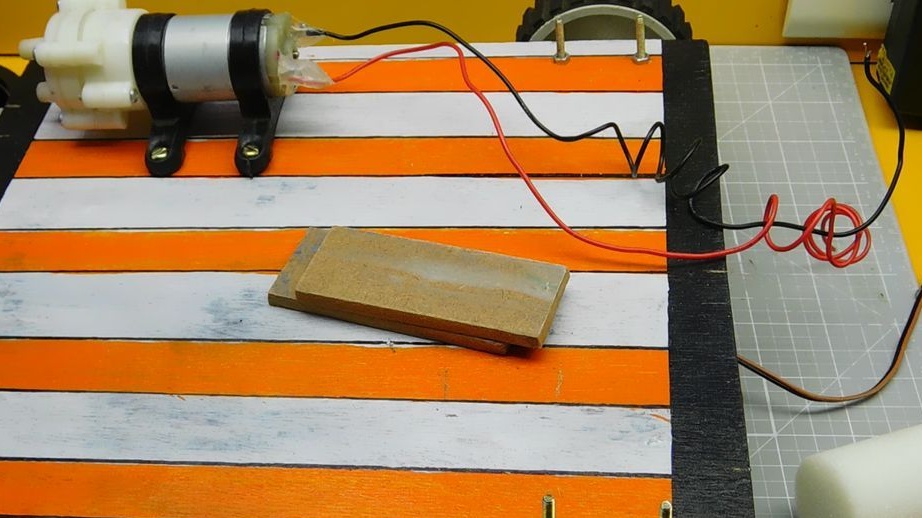
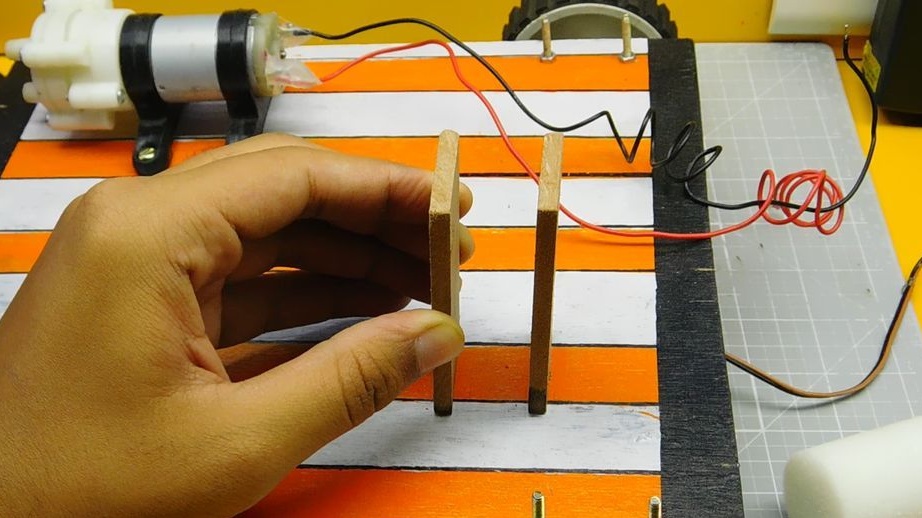
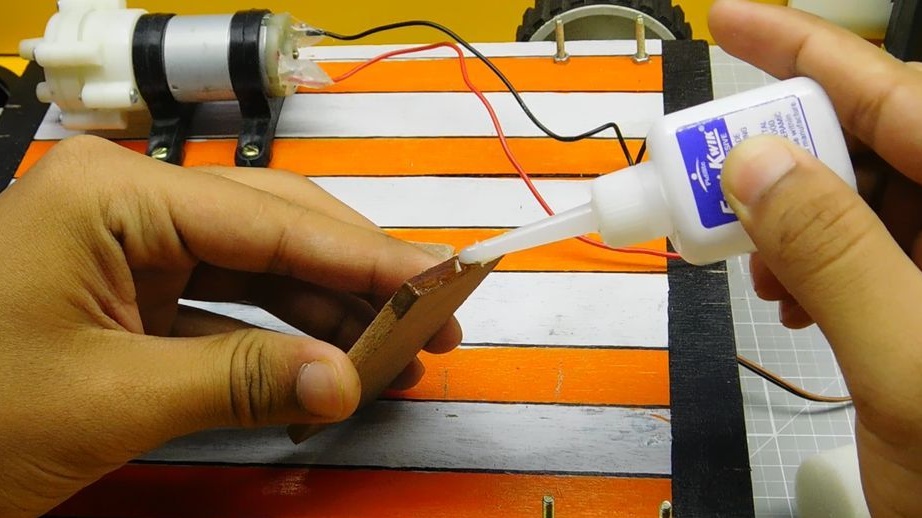
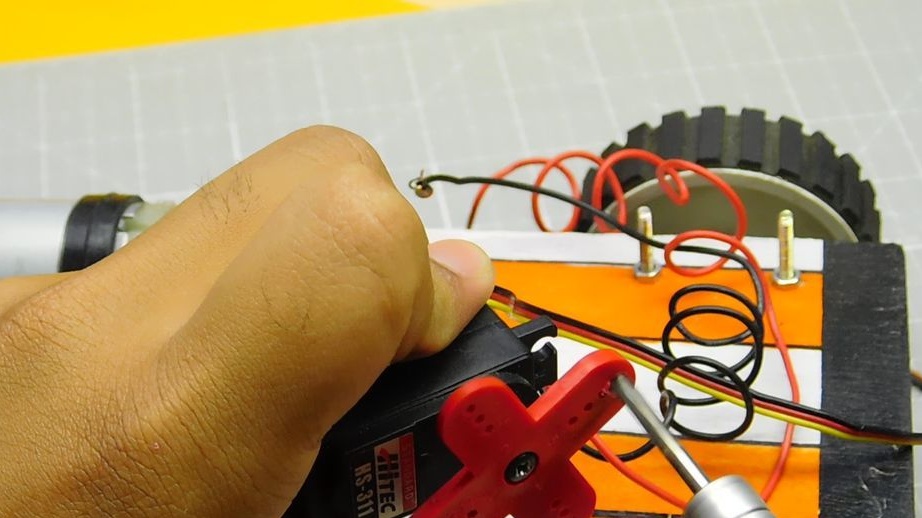
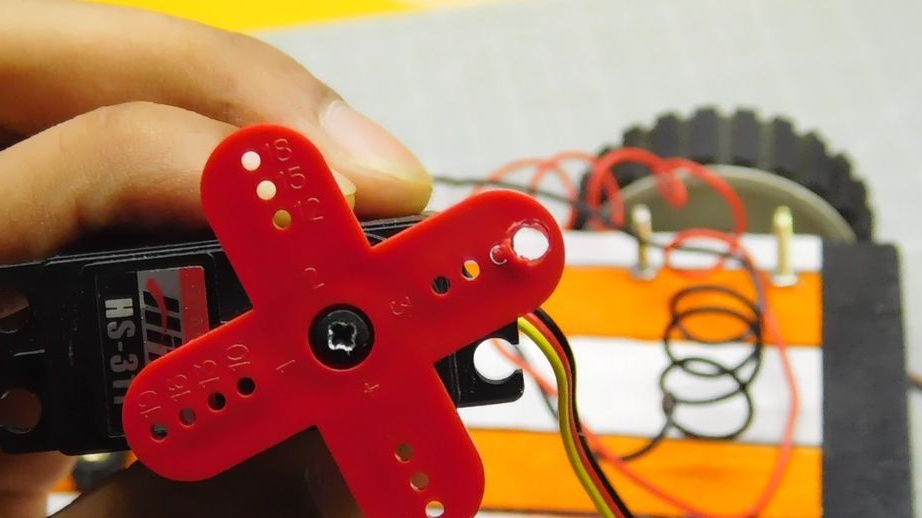
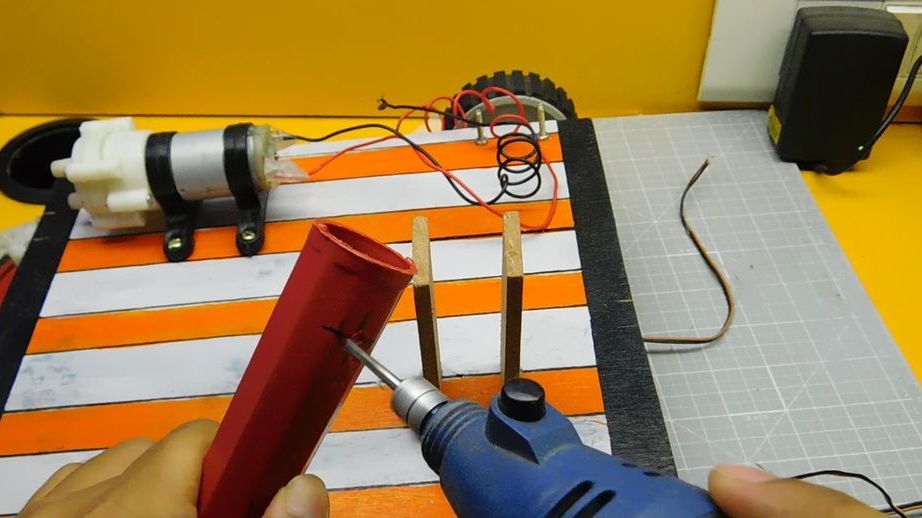
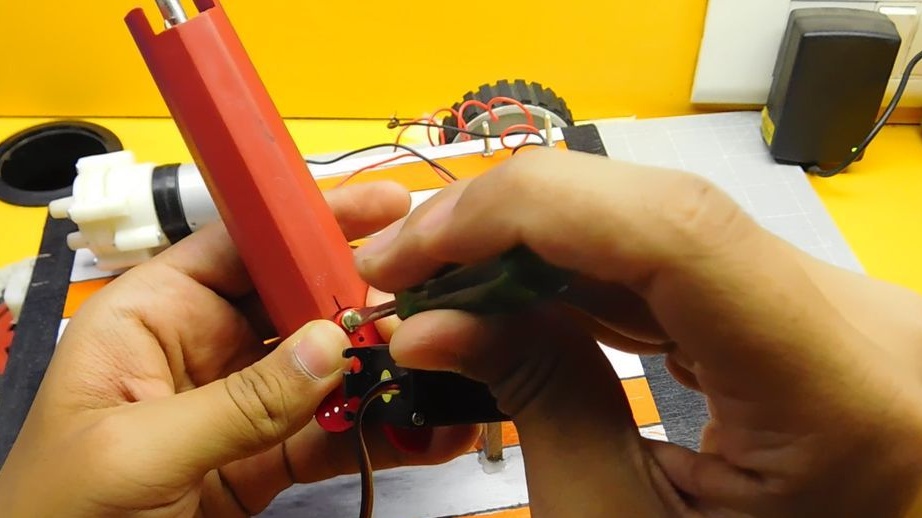
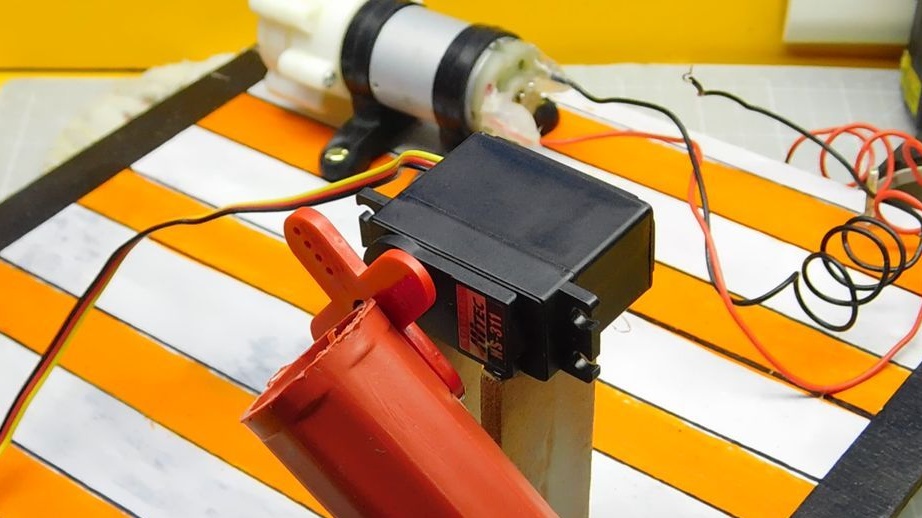
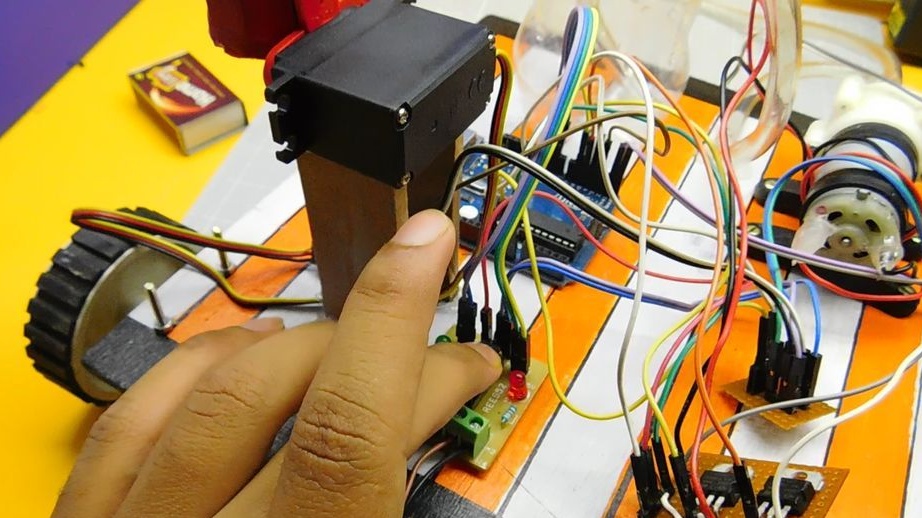
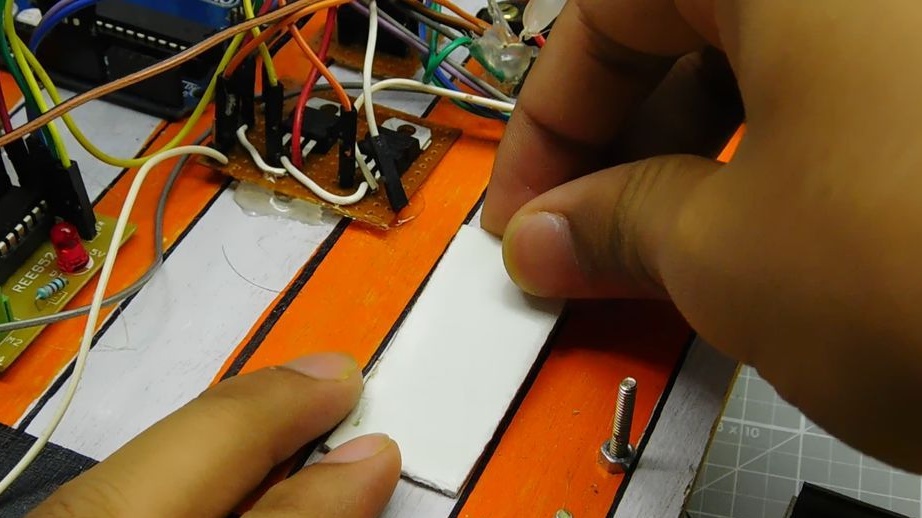
Krok trzeci: mechanizm podnoszenia rolek
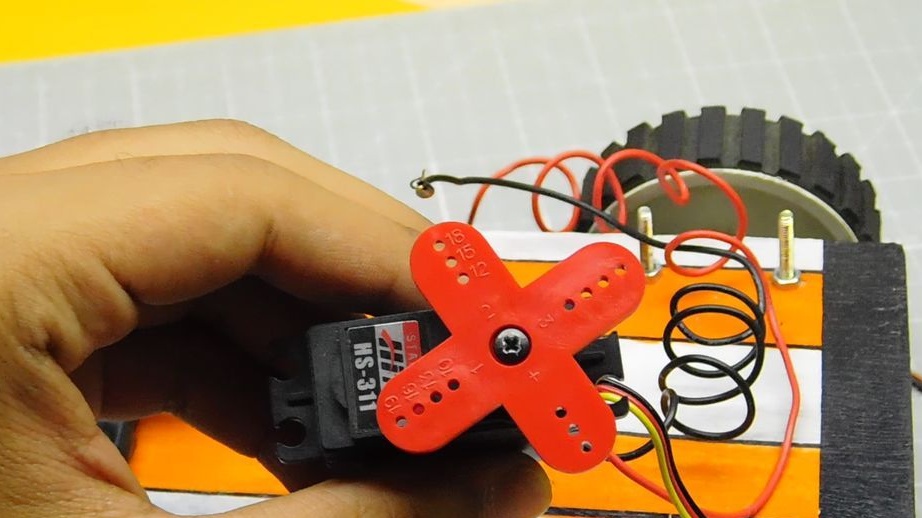
Zadaniem walca jest zbieranie drobnego pyłu. Ponieważ walec jest czasem potrzebny, mistrz postanowił stworzyć mechanizm do podnoszenia i opuszczania walca. Naprawia dwie listwy na platformie równolegle do siebie. Wykonuje dwa otwory, jeden w dźwigni serwa, drugi w uchwycie rolki. Przykręca uchwyt rolki do dźwigni. Mocuje serwo do listew.


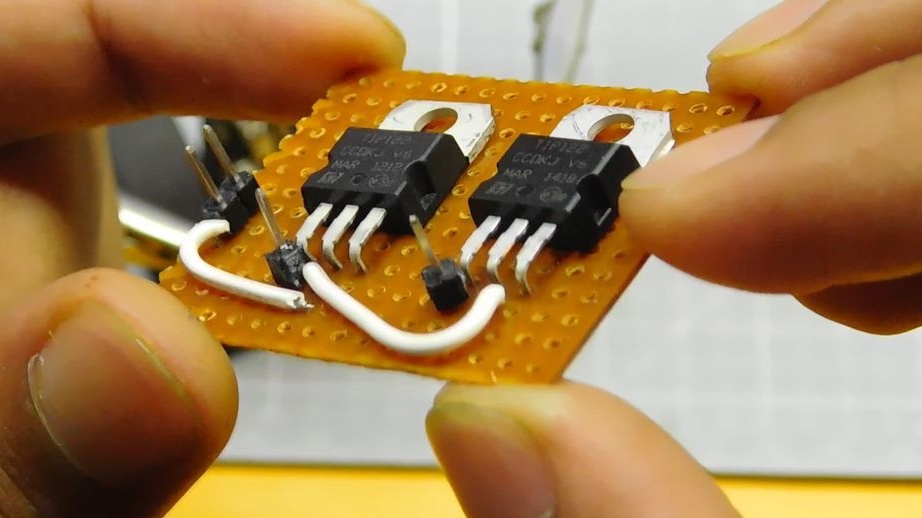
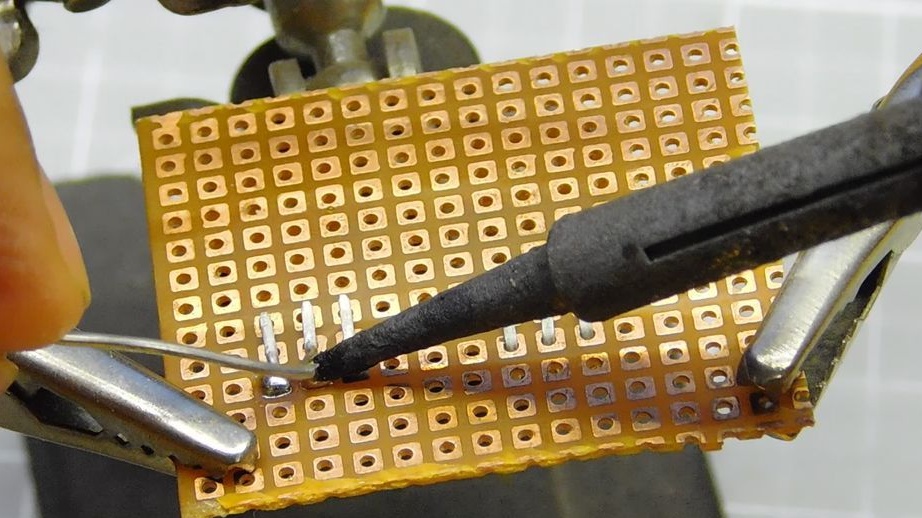
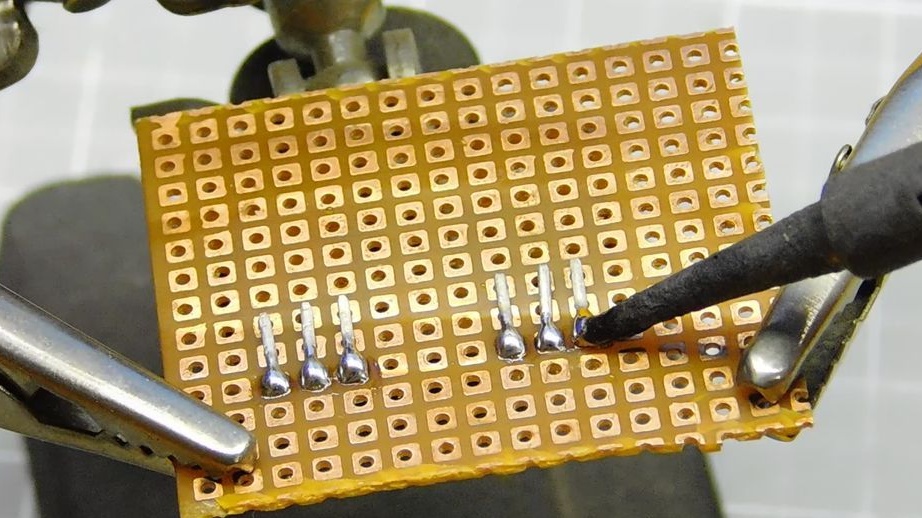
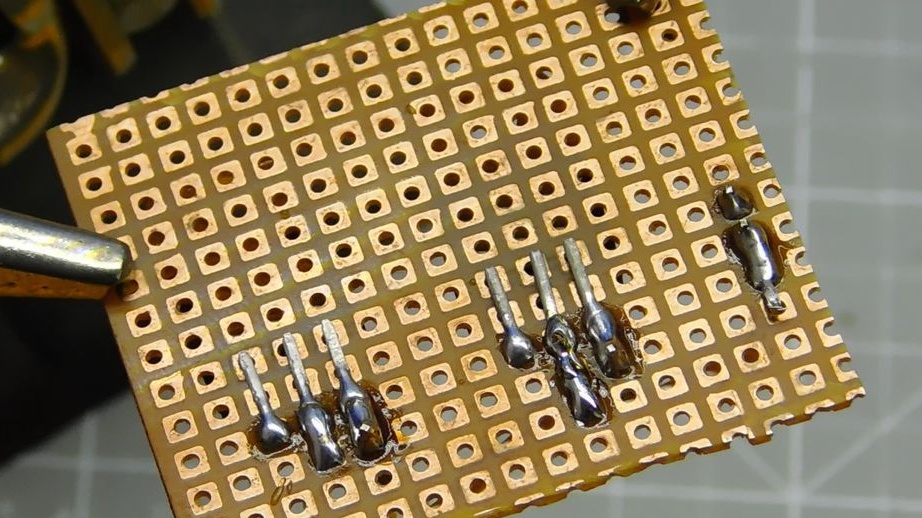
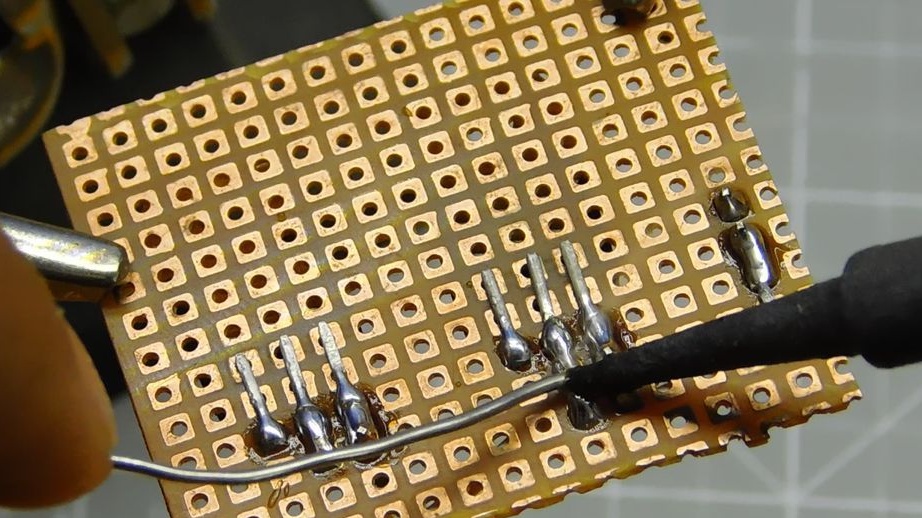
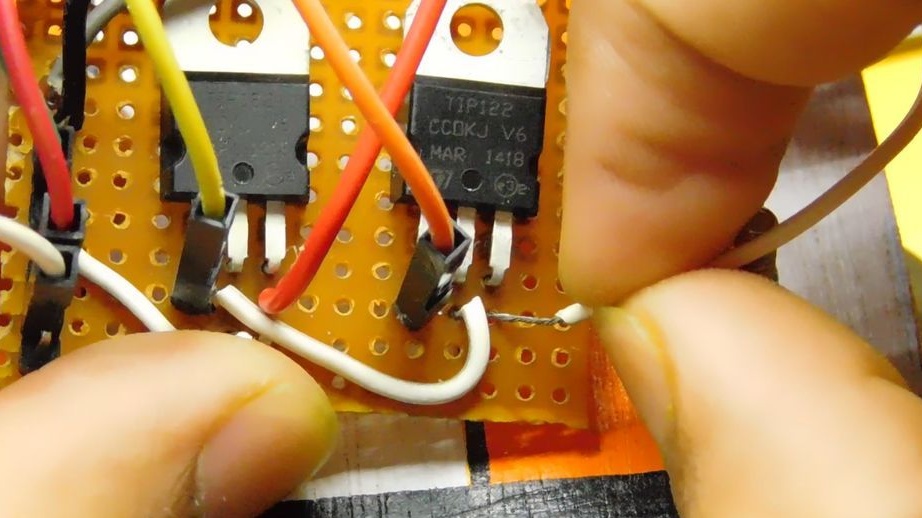
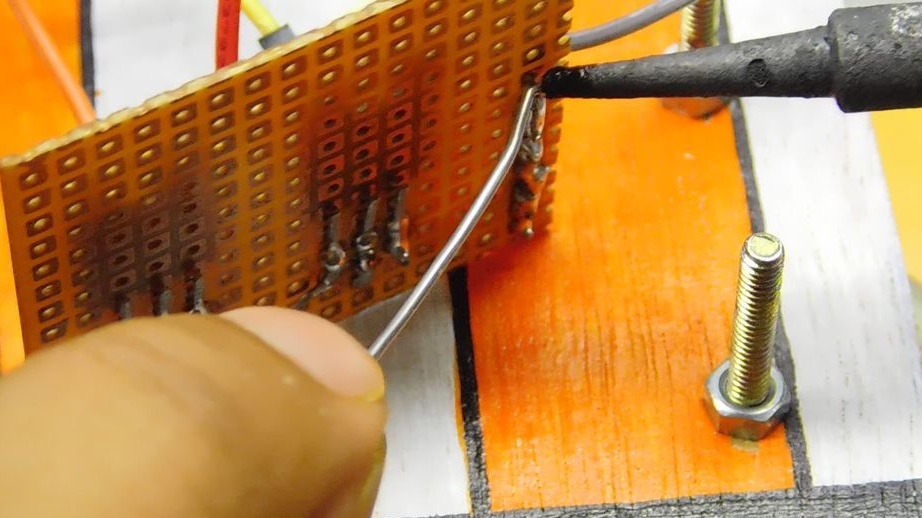
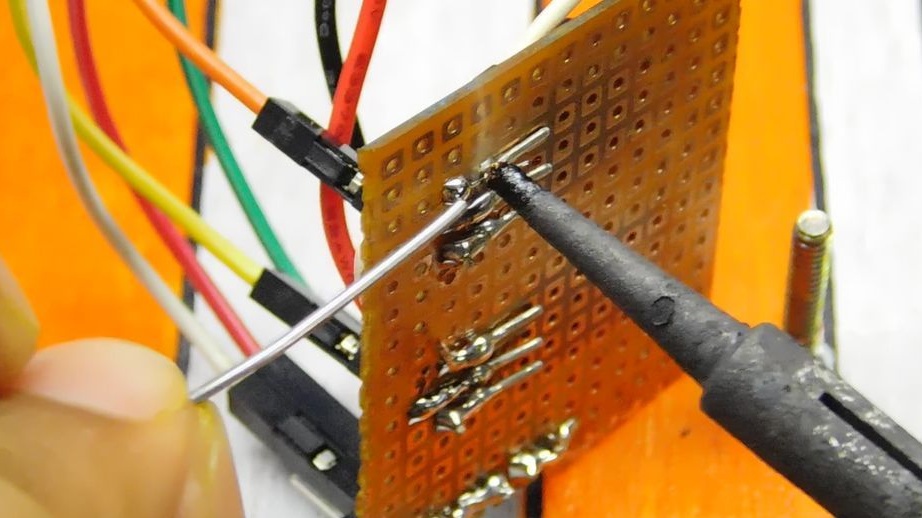
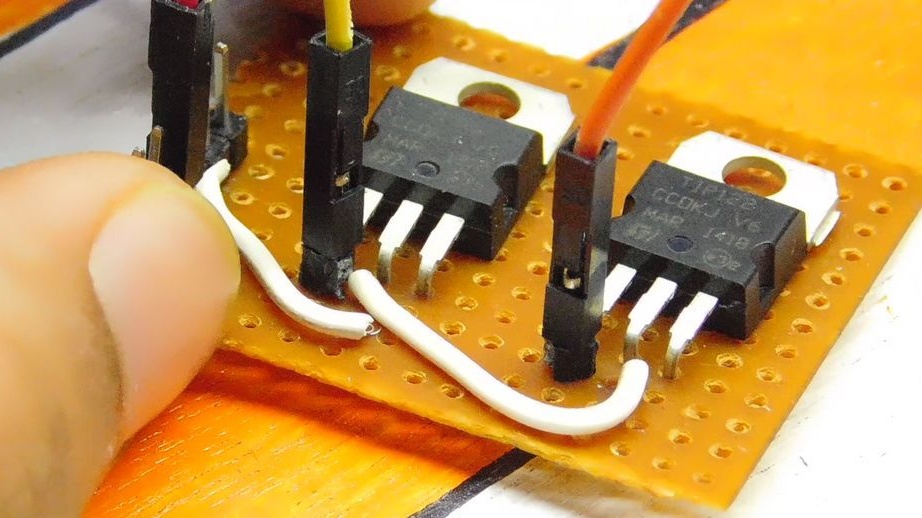
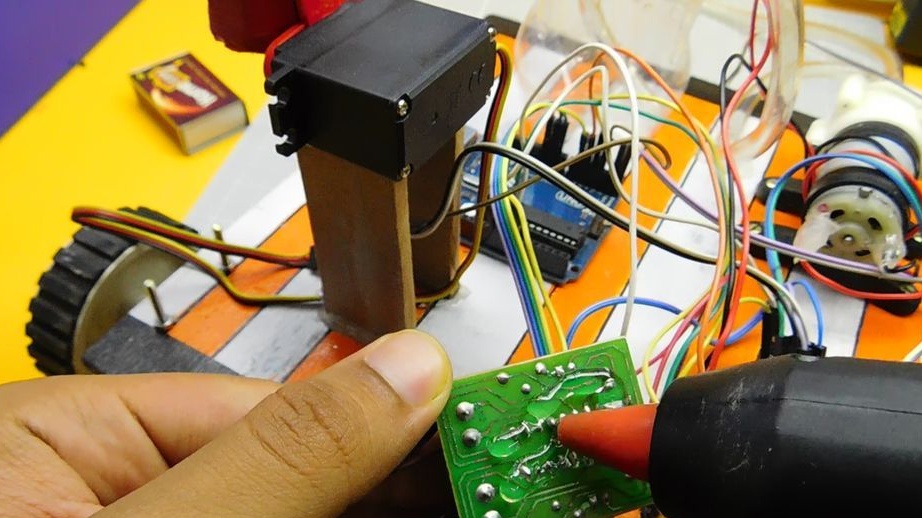
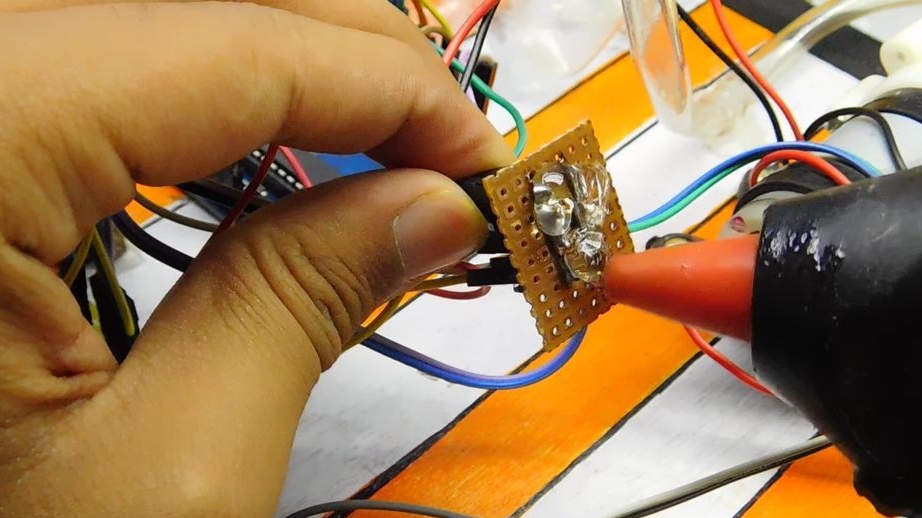
Krok czwarty: tranzystor
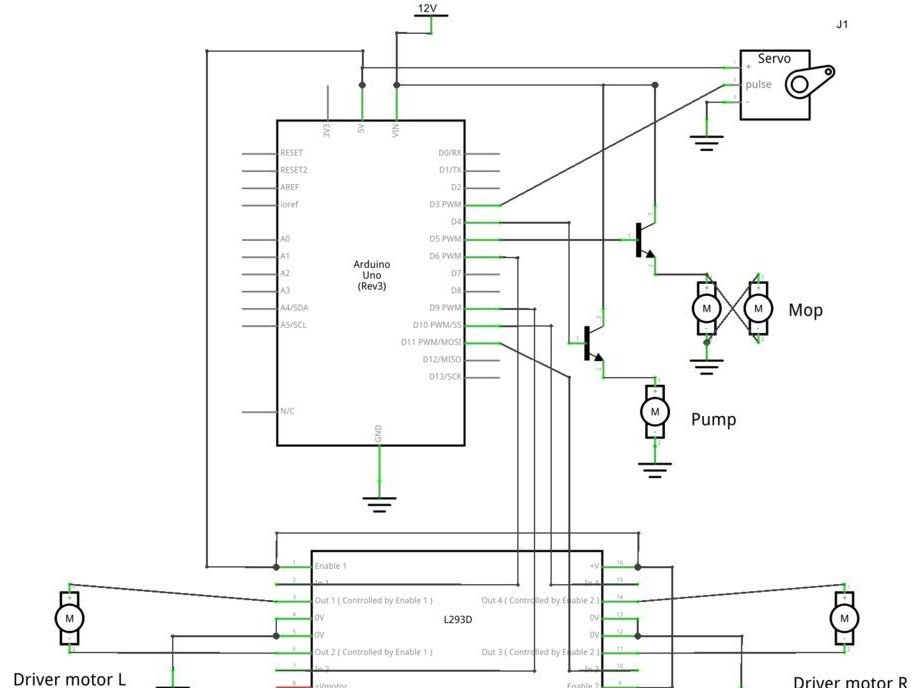
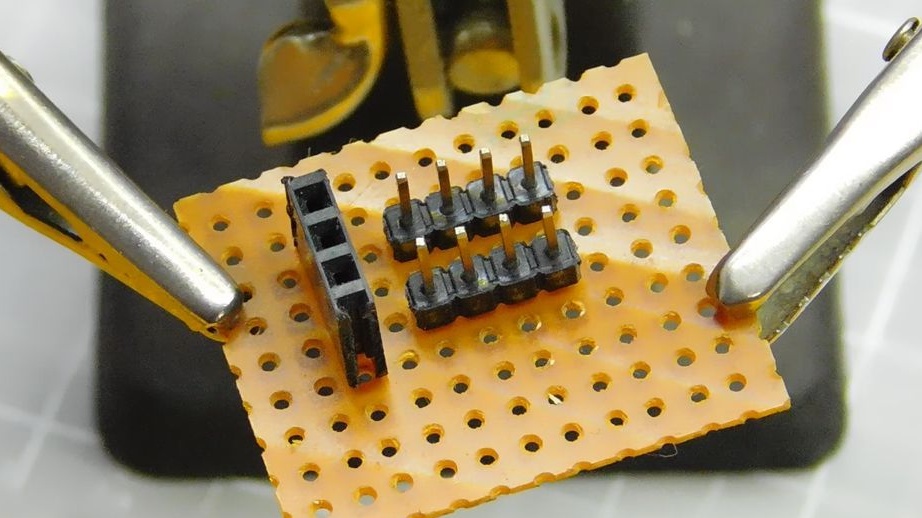
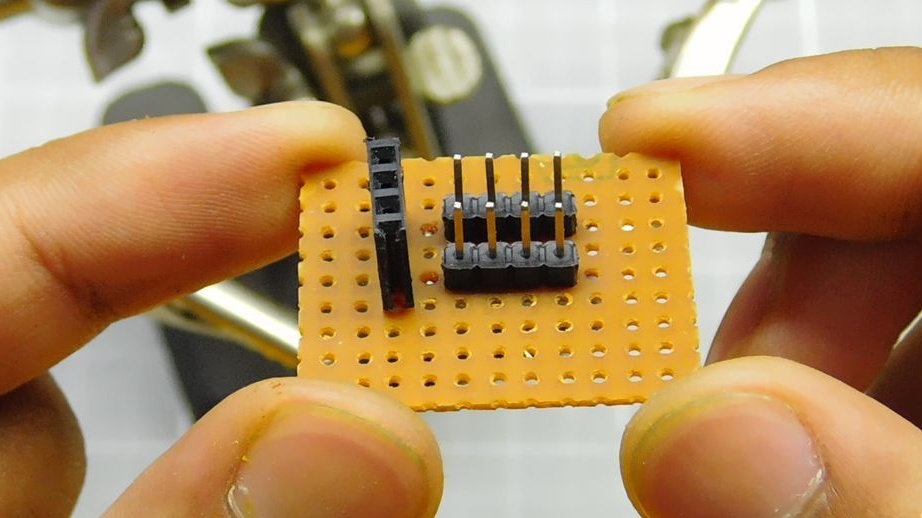
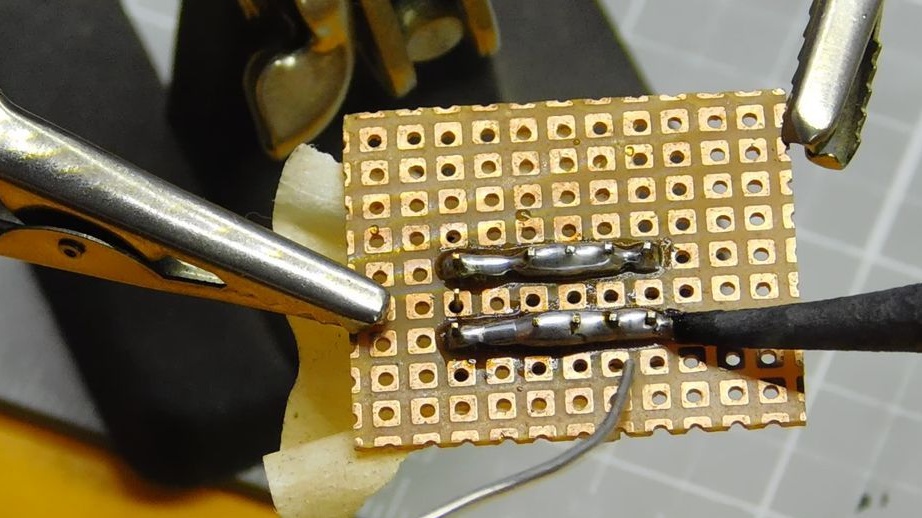
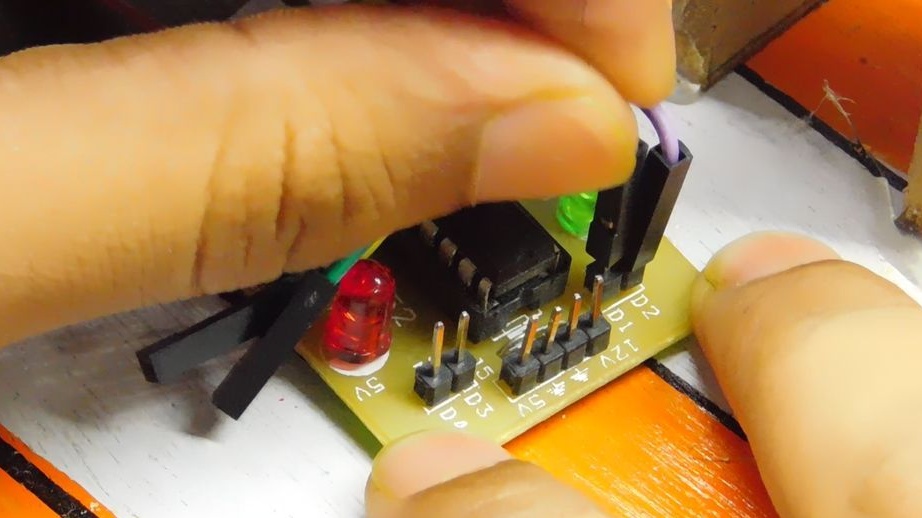
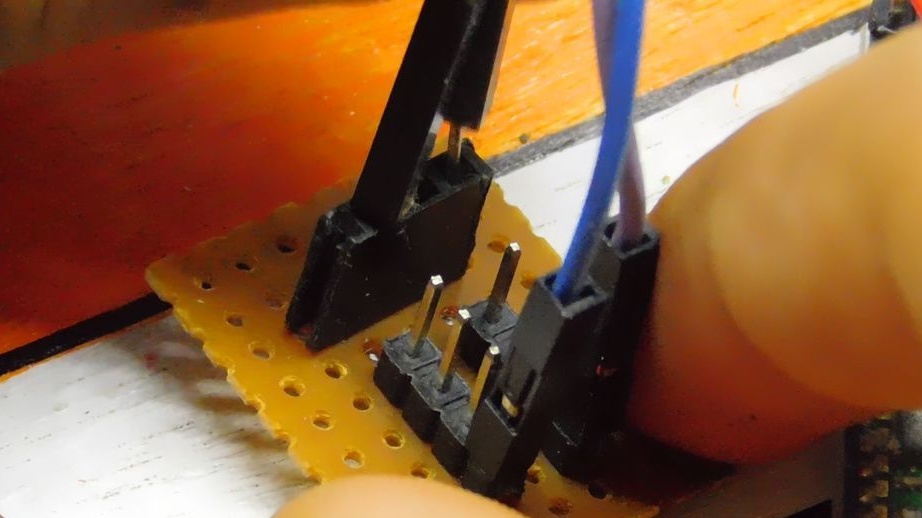
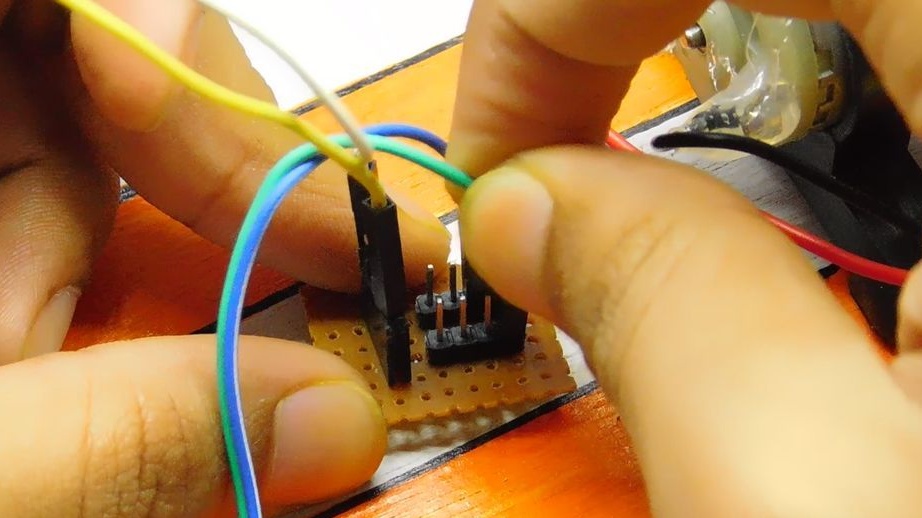
W przypadku pompy wodnej i silników potrzebna jest moc 12 V. Ale ponieważ Arduino daje tylko 5 V, urządzenie nadrzędne gromadzi obwód na tranzystorze TIP122.Ponadto kreator dodaje kilka styków + 5 V i Gnd do płytki drukowanej.
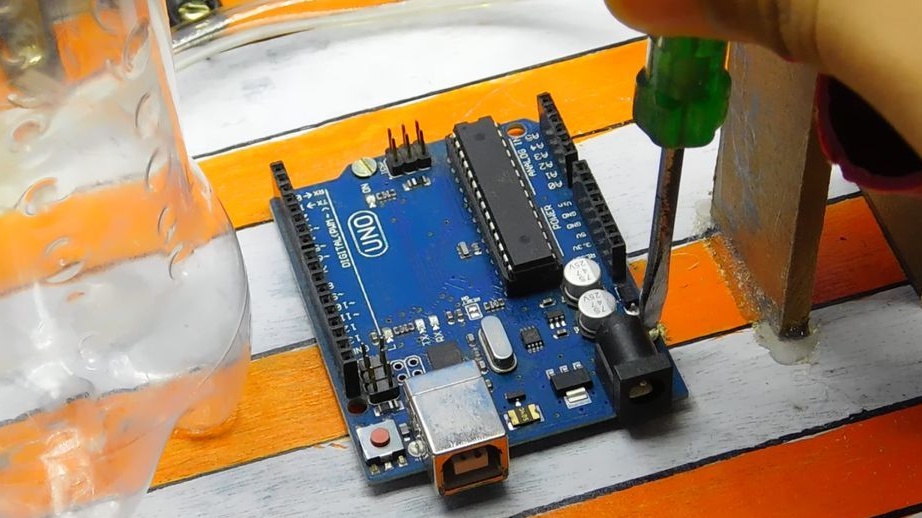
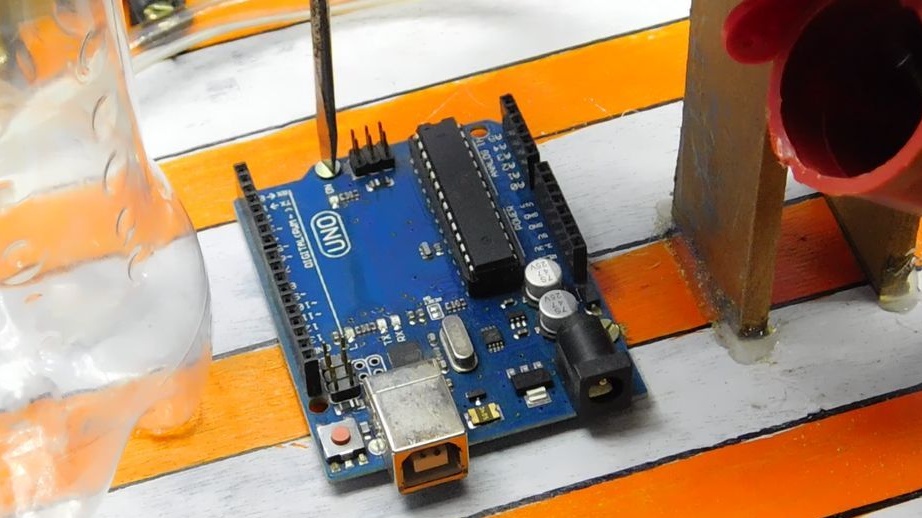
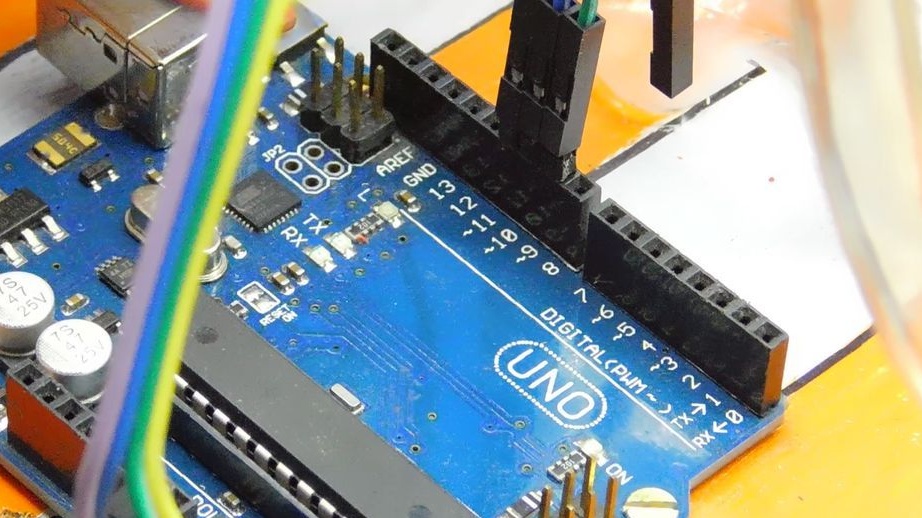
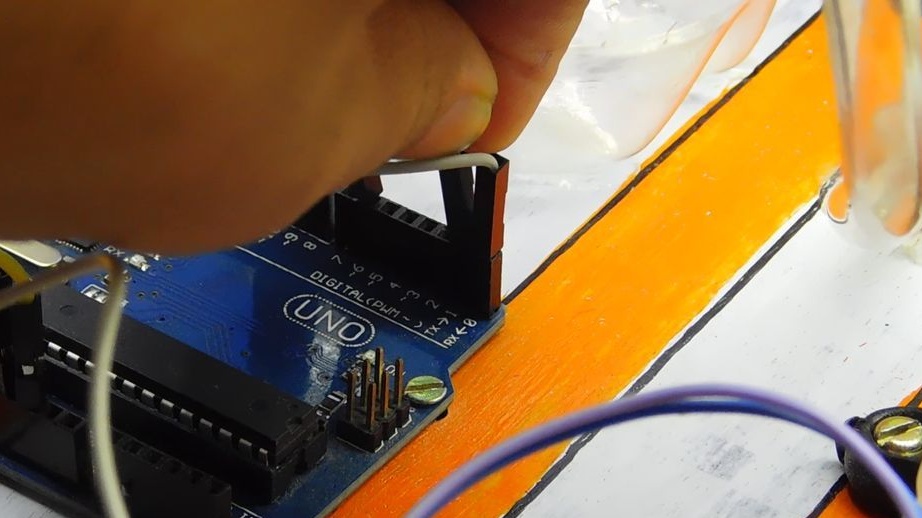
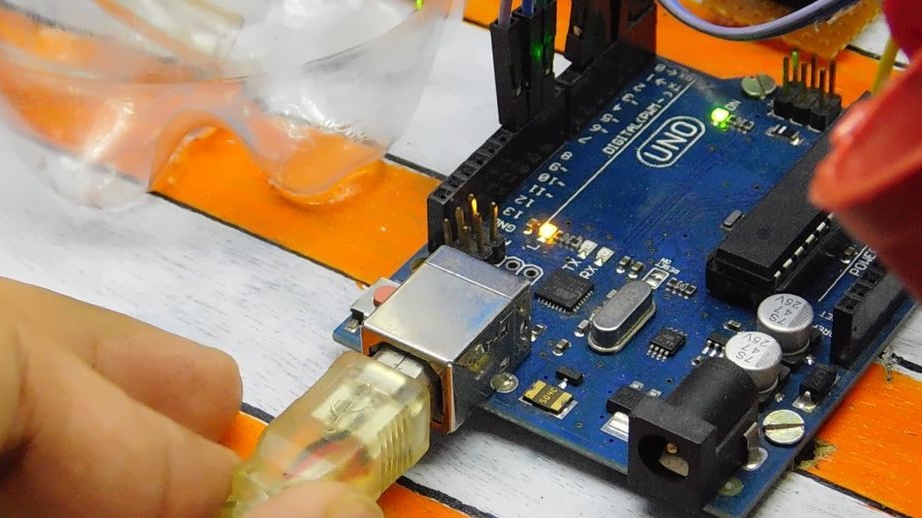
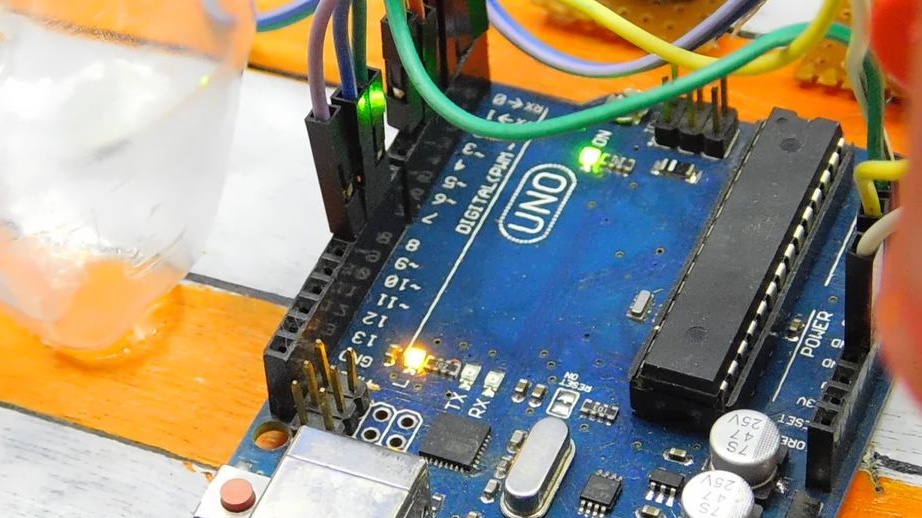
Krok piąty: Instalacja obwodu Arduino
Zabezpiecza Arduino na platformie i łączy urządzenia elektryczne z płytą.
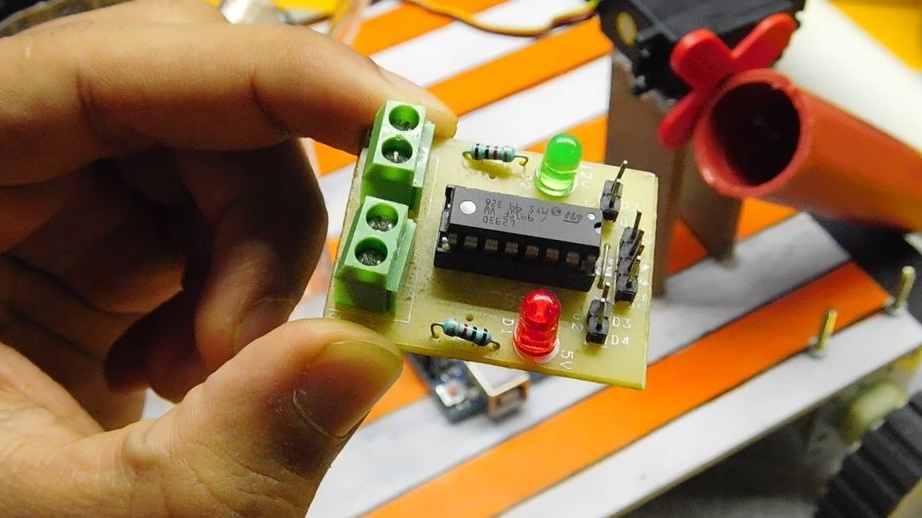
Moduł sterujący silnika.
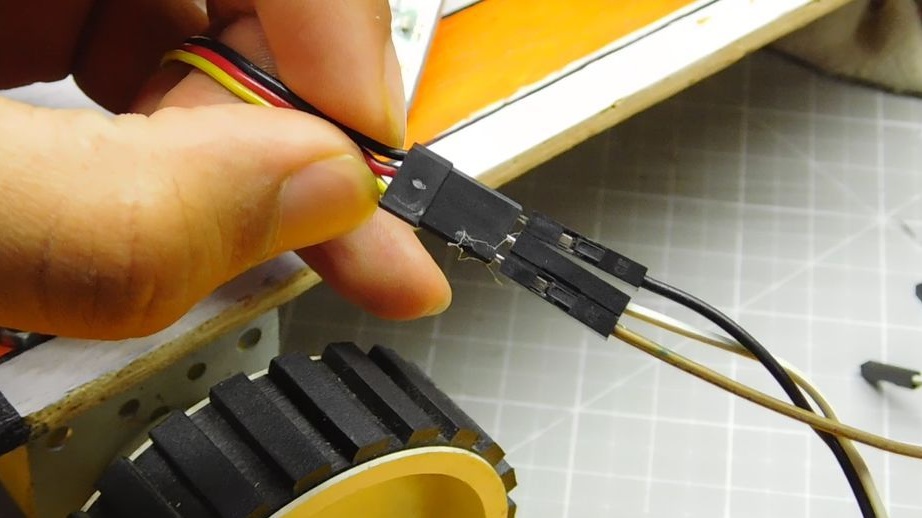
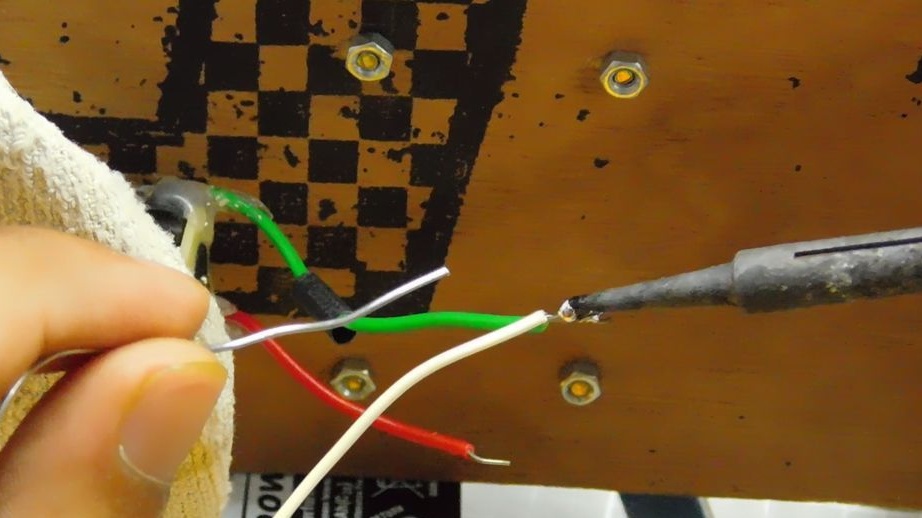
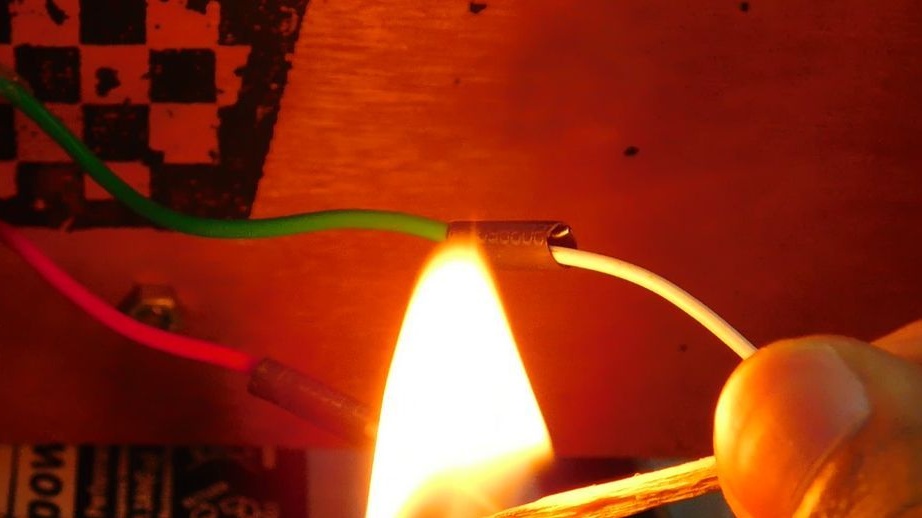
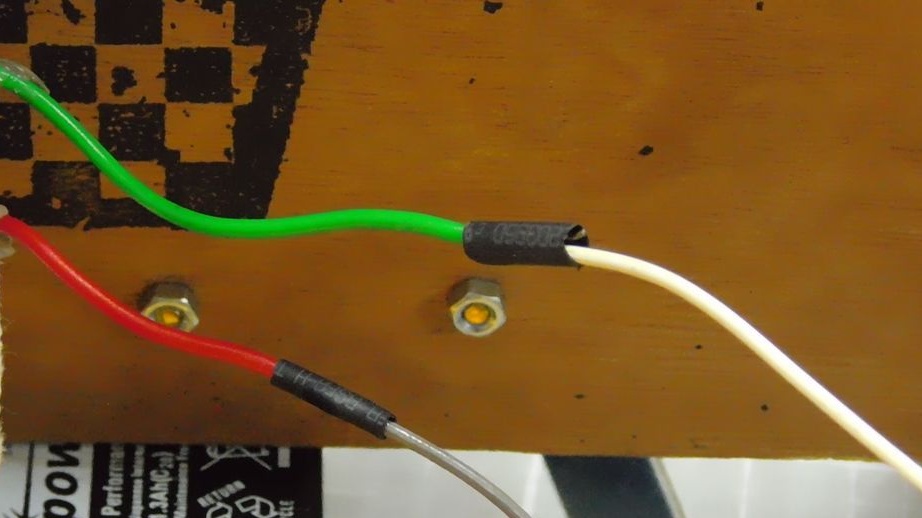
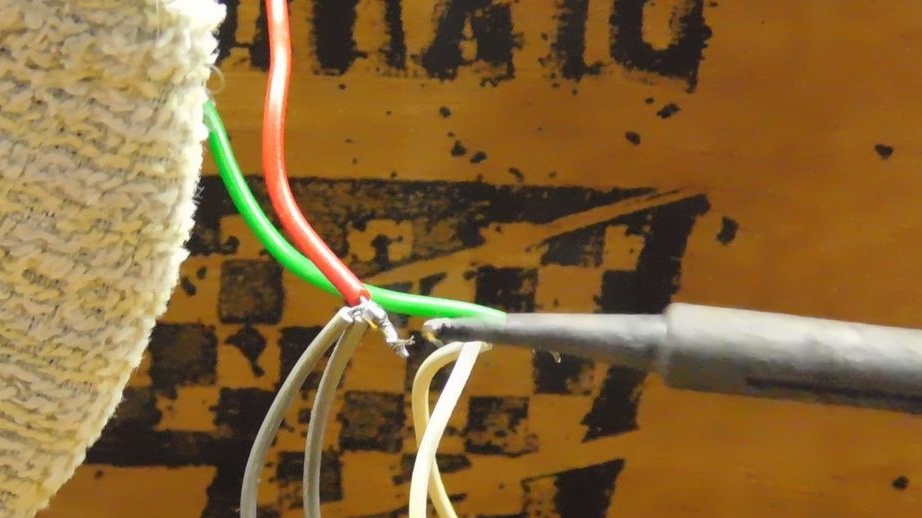
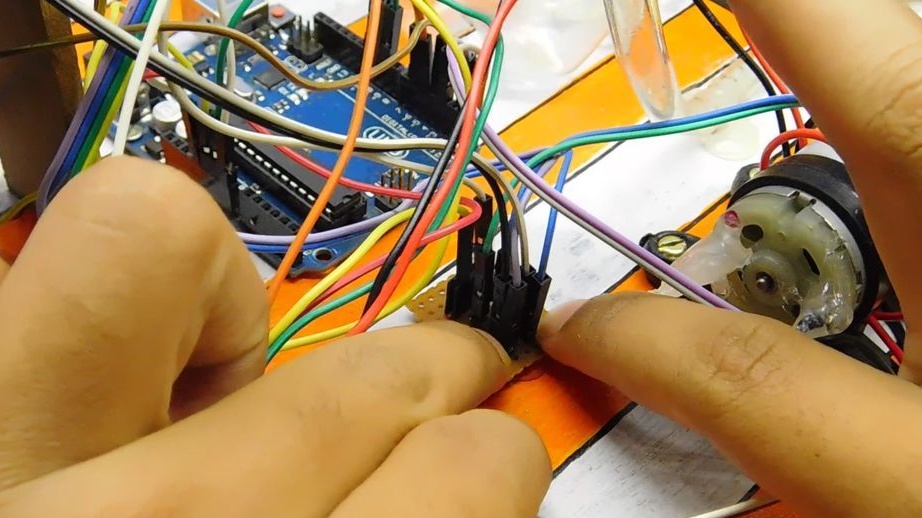
Lutuje do silników (na których koła są przymocowane do ruchu, a nie szczotek) drutów. Mocuje przewody w gniazdach montażowych modułu. Następnie podłącz moduł do Arduino w następujący sposób.
Moduł ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5 V - + 5 V.
Gnd-gnd
Moduł + 12V zostanie podłączony do akumulatora.
Połączenie Bluetooth.
Bluetooth ::: Arduino
Vcc - + 5 V.
Gnd - gnd
Rx - Tx
Tx - Rx
Silnik serwo ::: Arduino
Vcc - + 5 V.
Gnd - gnd
Sygnał - D3
Następnie łączy pompę i silniki szczotkowe zgodnie ze schematem. Silniki szczotkowe są połączone równolegle i obracają się w różnych kierunkach, w prawo i w lewo w lewo.

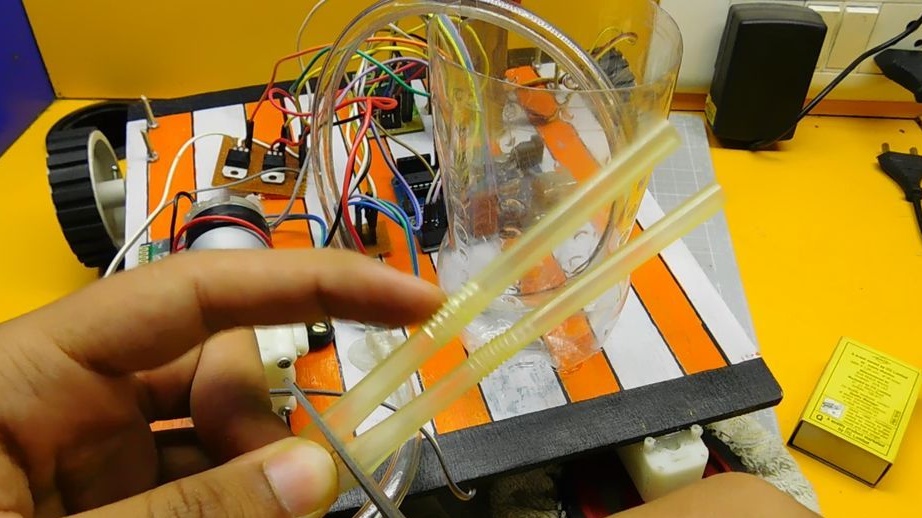
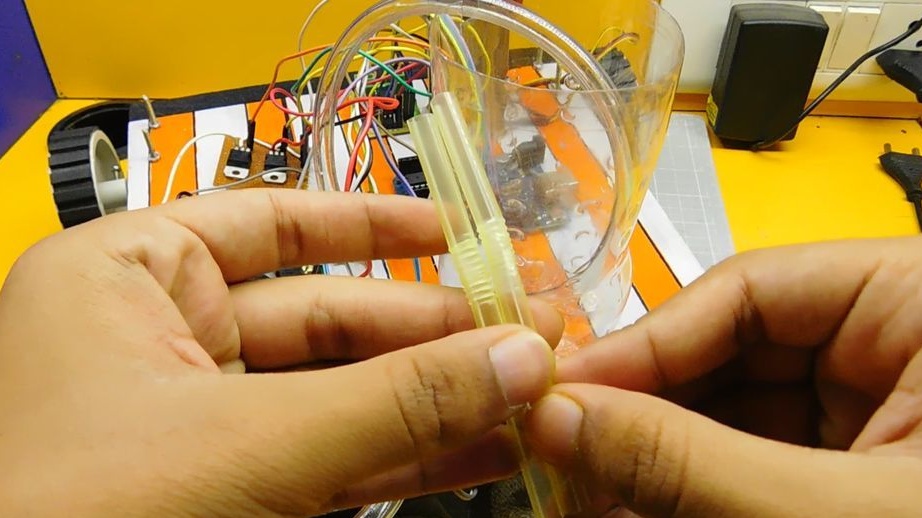
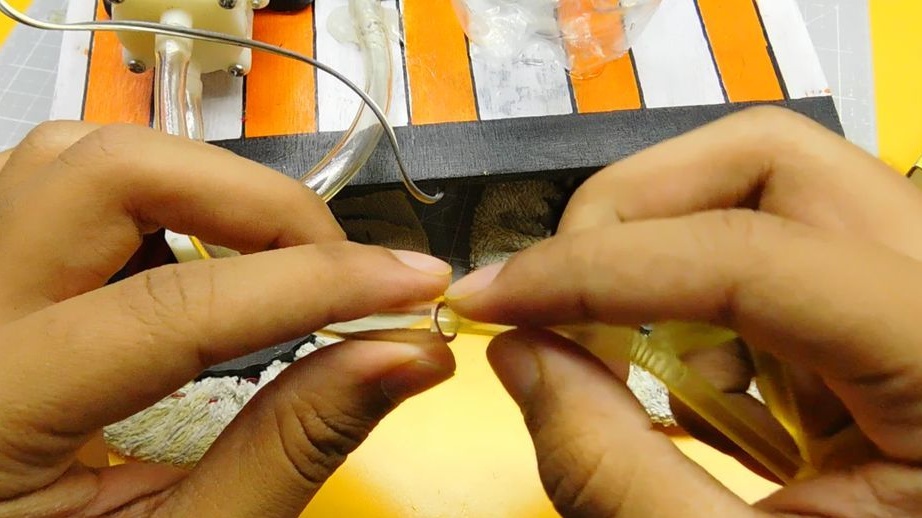
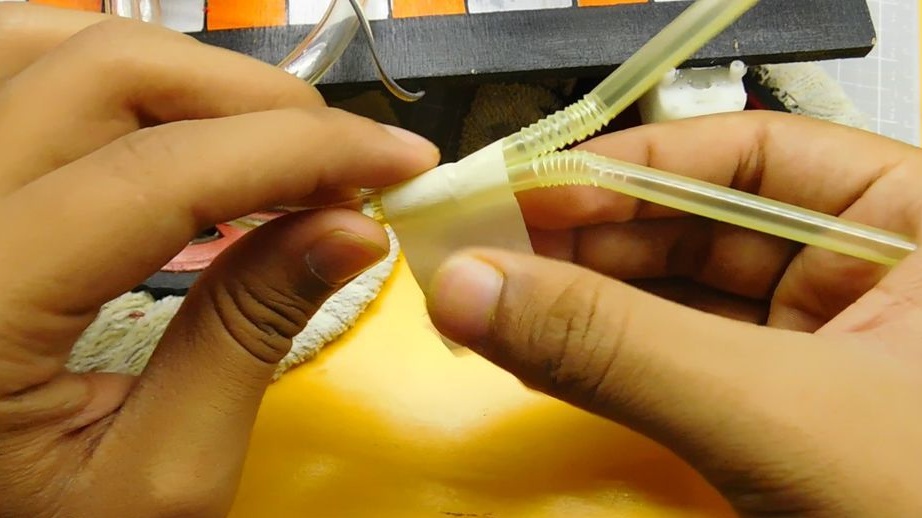
Krok szósty: Łączniki części robota
Kroi dwie słomki do koktajli o wielkości około 7 cm i wkłada je do rury doprowadzającej wodę. Mocuje słomki przed szczotkami.




Zamki na platformie elektroniczny komponenty.

Krok siódmy: pobierz kod
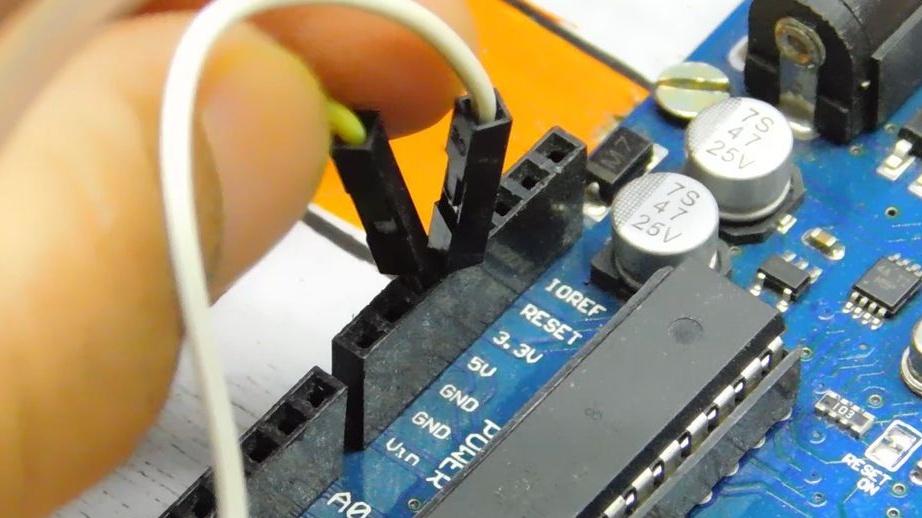
Usuwa zworki Rx i Tx z planszy Arduino. Łączy płytkę z komputerem. Ładuje kod. Ustawia zworki na miejscu. .
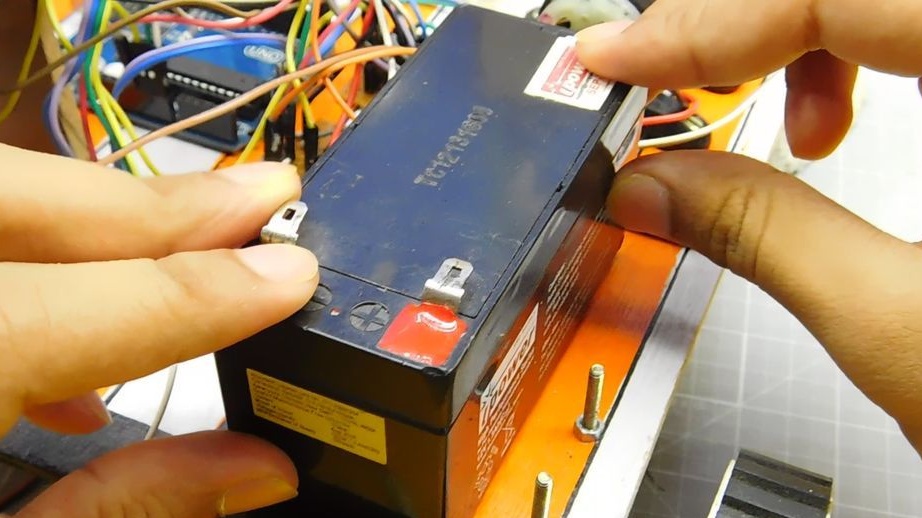
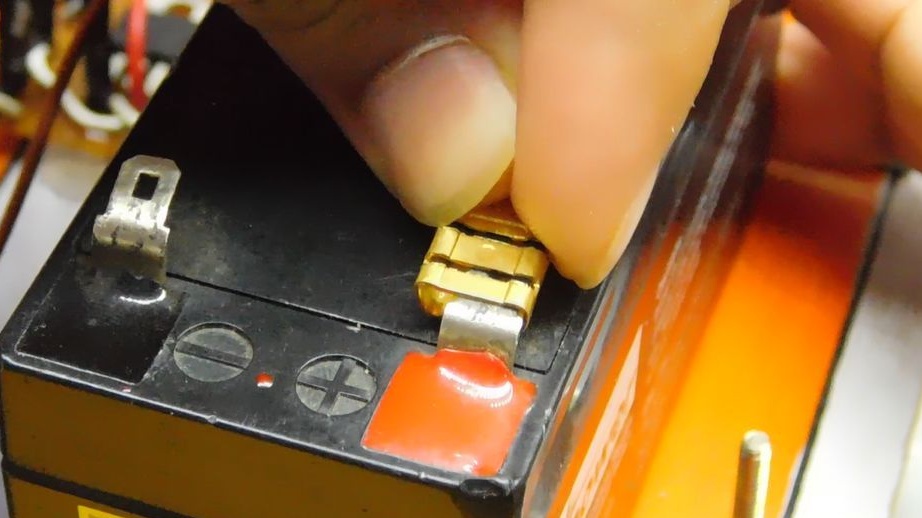
Krok ósmy: Bateria
Zabezpiecza baterię na platformie za pomocą taśmy dwustronnej. Łączy urządzenia elektroniczne z akumulatorem. Arduino Master zaleca podłączenie przez dzielnik napięcia. Możesz także dodać przełącznik do obwodu.

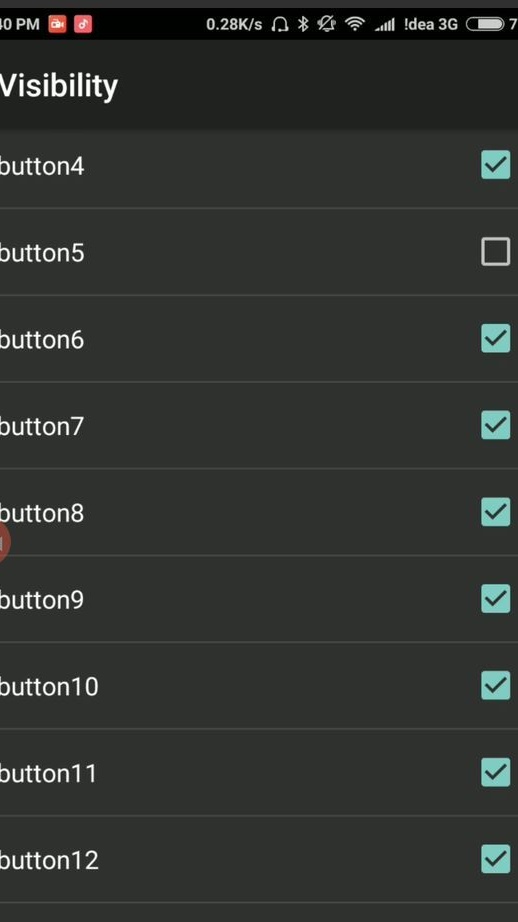
Krok dziewiąty: kontroluj robota
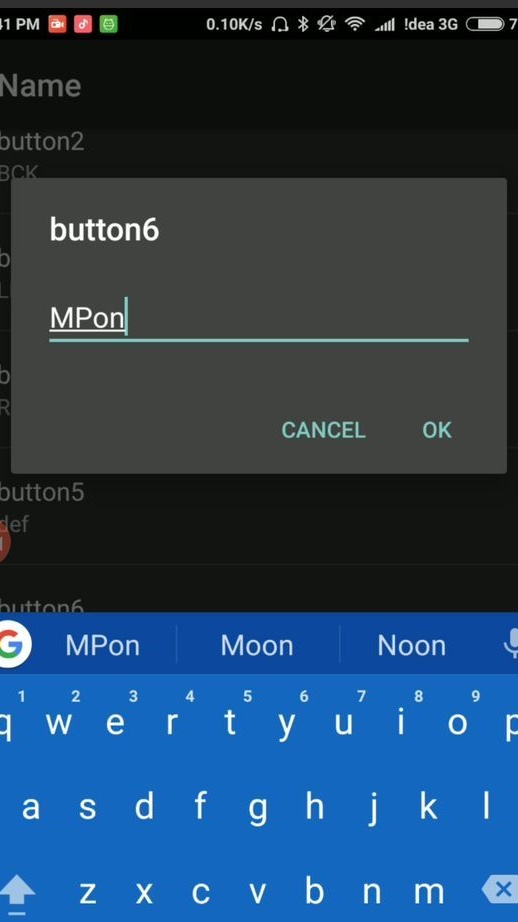
Z Google Play kreator pobiera aplikację „Bluetooth Serial Controller”. Otwiera aplikację. Przejdź do ustawień> widoczność. Wyłącza przyciski 5, 9, 12. Przechodzi do nazw. Przypisuje przycisk 2-3 liter do każdego przycisku. Zobacz zdjęcie poniżej.
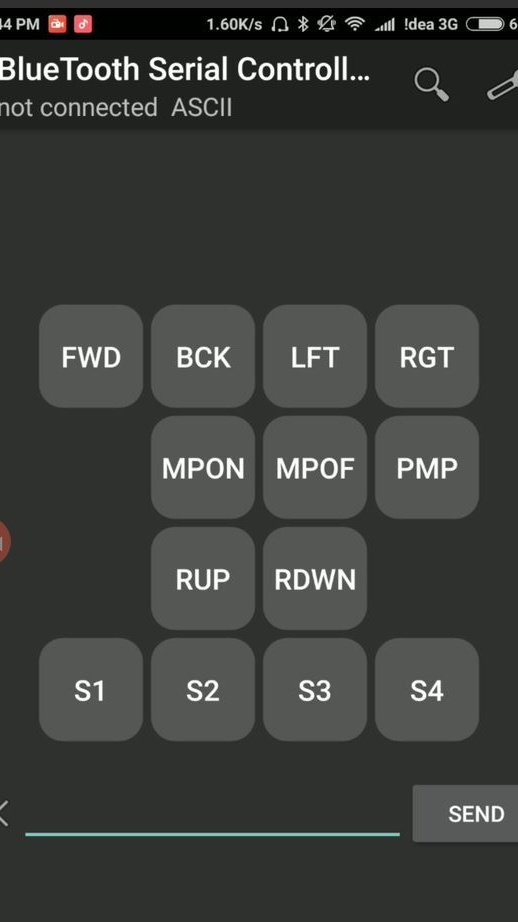
Następnie każdy przycisk instaluje polecenie (cudzysłowy należy usunąć, nie zmieniaj wielkości liter):
Przycisk 1 (FWD): „F”
Przycisk 2 (BCK): „B”
Przycisk 3 (LFT): „L”
Przycisk 4 (RGT): „R”
Przycisk 6 (MPON): „M”
Przycisk 7 (MPOF): „m”
Przycisk 8 (PMP): „P”
Przycisk 10 (RUP): „U”
Przycisk 11 (RDWN): „u”
Przycisk 13 (S1): „1”
Przycisk 14 (S2): „2”
Przycisk 15 (S3): „3”
Przycisk 16 (S4): „4”
W poleceniach zatrzymania> poleceń przypisuje polecenia tylko do tych przycisków:
Przycisk 1: „S”
Przycisk 2: „S”
Przycisk 3: „S”
Przycisk 4: „S”
Przycisk 8: „p”

Teraz pozostaje połączyć się z modułem bluetooth („HC-05”), wprowadzić hasło (1234 lub 0000) i możesz spróbować posprzątać pokój -)))
Dzięki mistrzowi-mistrzowi i życzymy mu ulepszenia robota i uzyskania od niego całkowicie autonomicznej pracy.
Cały proces montażu robota czyszczącego można zobaczyć na filmie.