



W tym artykule opisano, jak zrobić zrób to sam artysta robotów. Oczywiście masz takie zdjęcie robot nie będzie rysował, ale zaskakiwał znajomych lub przyjaciół domowej roboty jest to możliwe. A jeśli zbierzesz takiego robota ze swoimi dziećmi, to niewątpliwie pomoże w rozwoju kreatywnych cech charakteru.
Narzędzia i materiały:
-Dwa napędy LED;
-Board 3 mm;
-Saw;
-Klej;
-
-
-
-
-
-Komputer;
- śrubokręt;
-Lutownica:
Smarowanie:
-Reguła;
-Ołówek;
-Drill;
-Klej pistoletu;
Pisanie piórem;
- nożyczki;
-Wiosna;
-Wątek;
- Akumulator 12V;
-Wire;
Krok pierwszy: Napędy LED
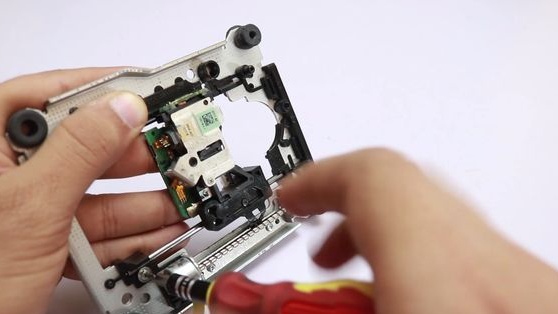
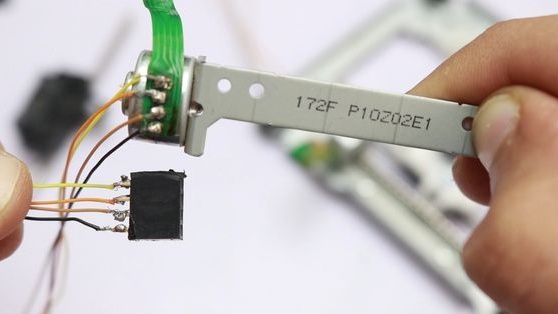
Analizuje napędy CD. Usuwa osłony, płytkę elektroniki.





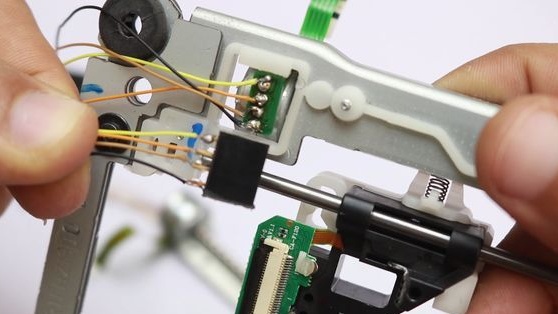
Usuwa ramę z wózkiem i silnikiem krokowym z obudowy.
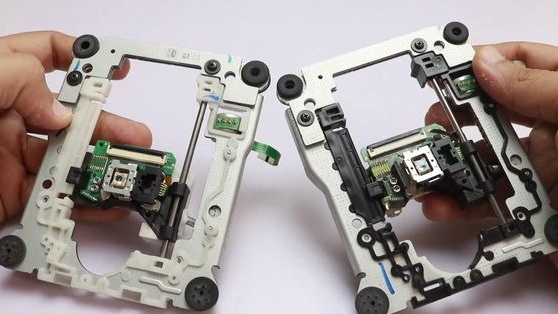
Kładzie jedną klatkę, a drugą analizuje.
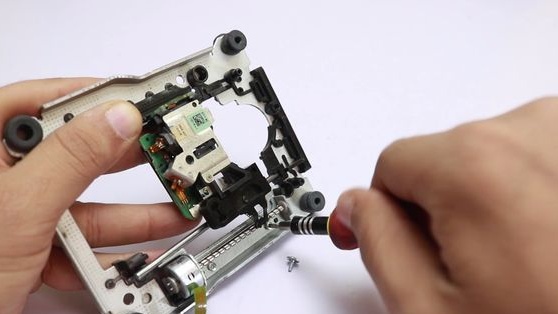
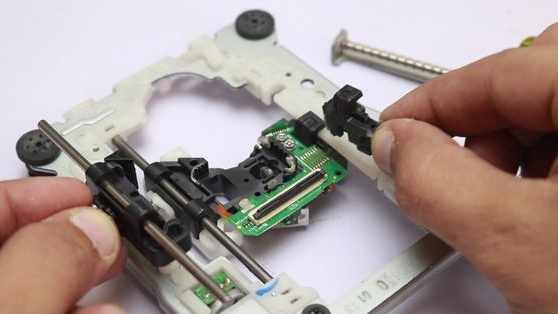
Z drugiego napędu CD potrzebna jest tylko karetka i silnik krokowy.


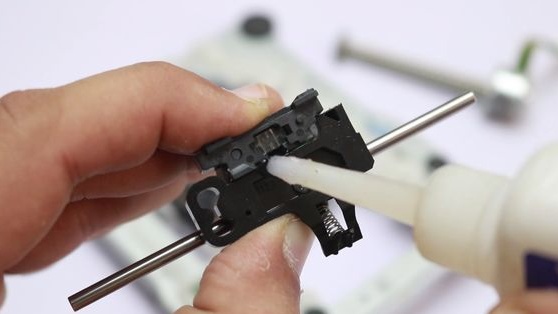
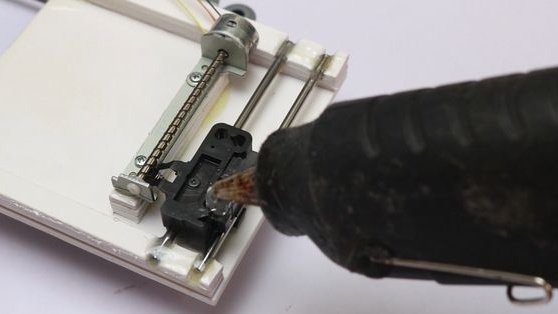
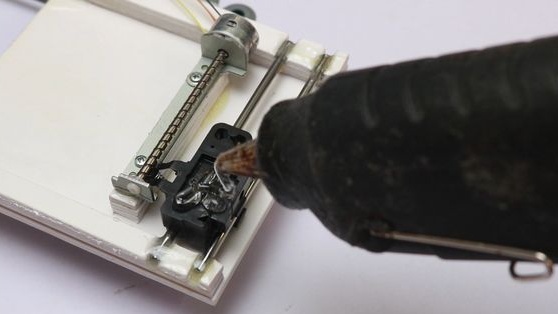
Smaruje wózek.
Lutowane do drutowych silników krokowych. Złącze jest przylutowane do drugich końców przewodów.
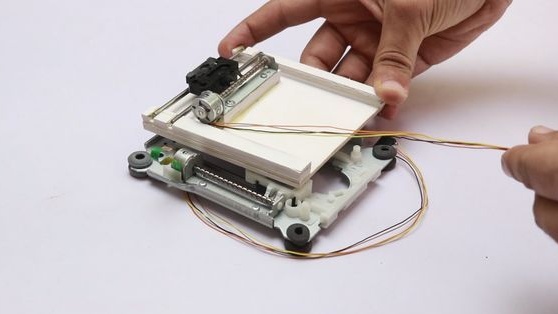
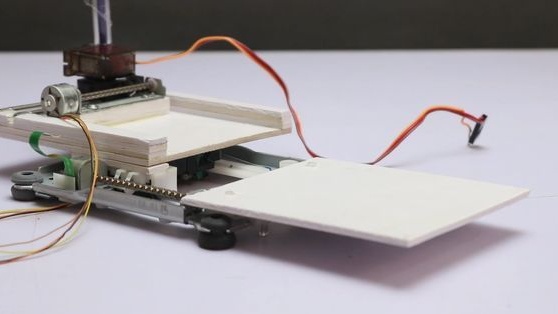
Krok drugi: oś X i oś Y.
Odetnij deskę (dalej stół) 10 * 9 cm, a na krawędziach stołu przyklej pręty 2 * 10 cm.
Wytnij rowki dla prowadnic karetki. Klei prowadnice.

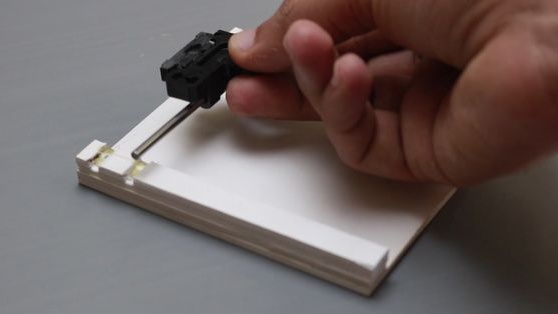
Blok kleju 3 * 5 cm obok wózka Przykręca silnik krokowy. Oś X jest gotowa.
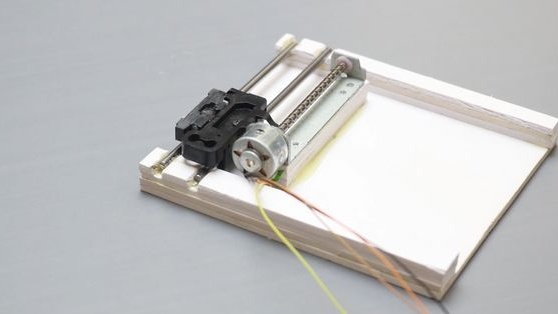
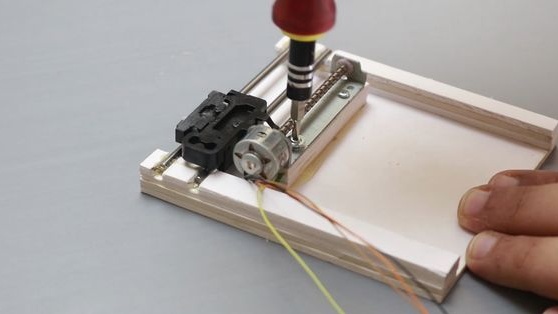
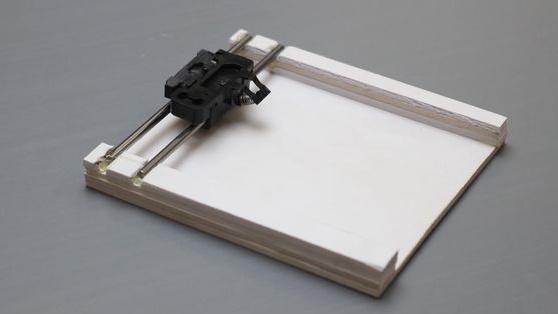
Przykleja mechanizm osi X do mechanizmu osi Y.

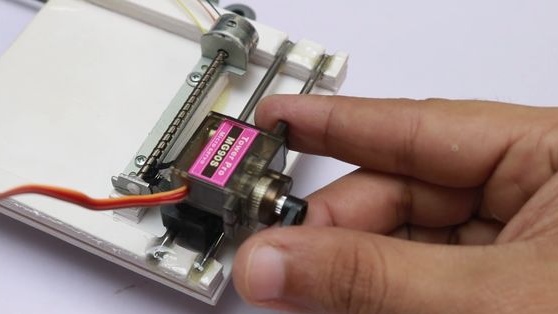
Mocuje serwonapęd do karetki z wałem skierowanym na zewnątrz (patrz zdjęcie)
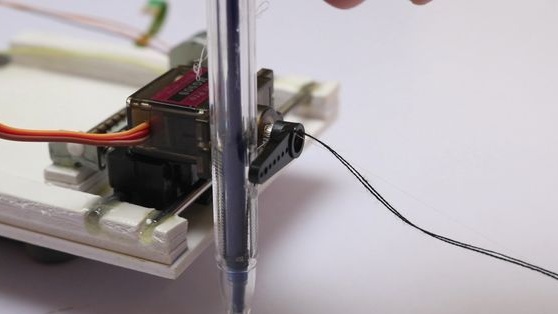
Krok trzeci: pióro
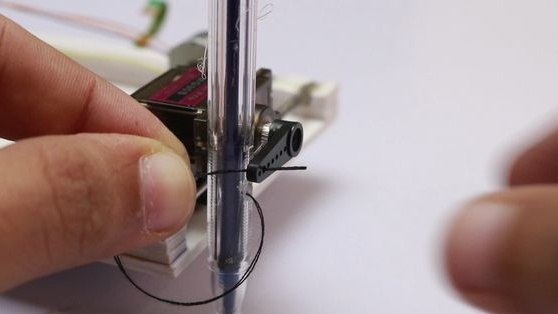
Analizuje pióro. Odcina 1 cm od górnego końca wałka. Skręca sprężynę na pręcie. Po wycofaniu się około 1 cm od dna pręta owinąć go nitką. Sęki W uchwycie robi się dziura. Wciąga nić do otworu. Instaluje pręt na miejscu. Ustawia górną granicę.






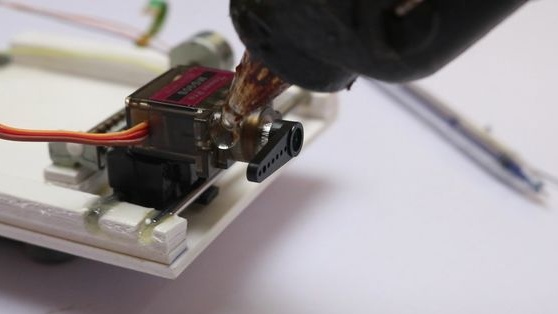
Przyklej uchwyt do korpusu siłownika (kula pręta spoczywa na powierzchni). Mocuje drugi koniec nici do dźwigni serwomechanizmu.
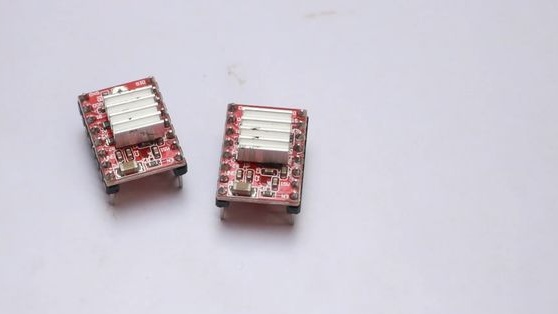
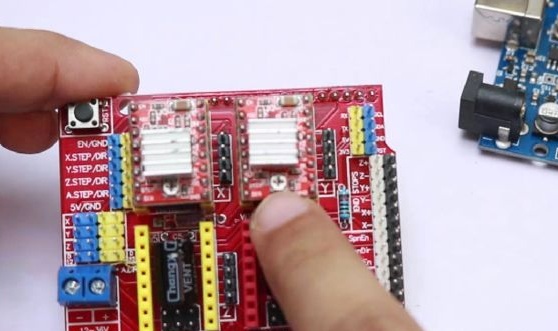
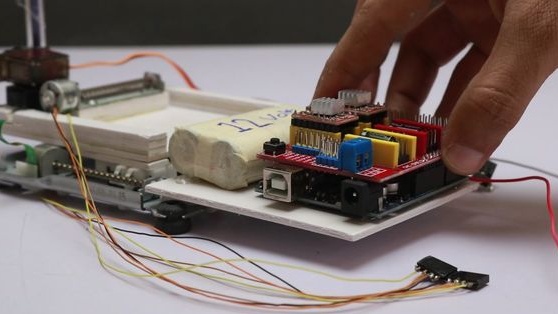
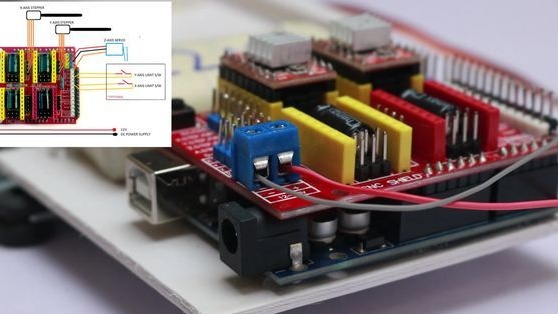
Krok czwarty: montaż modułu
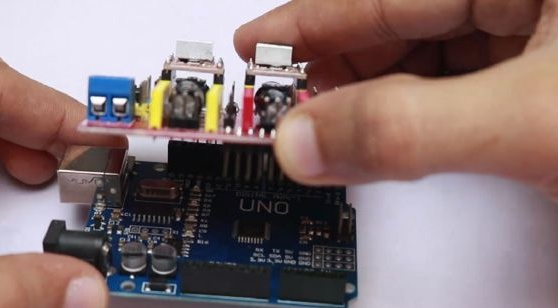
Instaluje dwa moduły silnika krokowego z grzejnikami na płycie rozszerzeń.
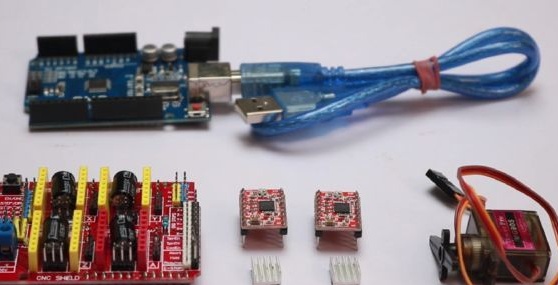
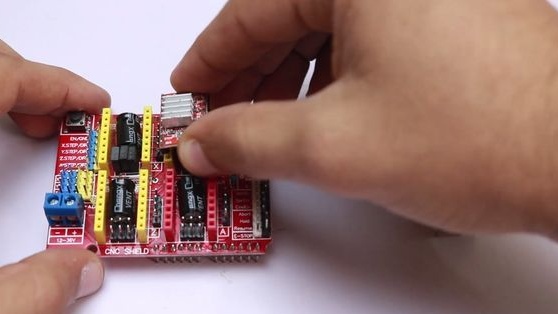
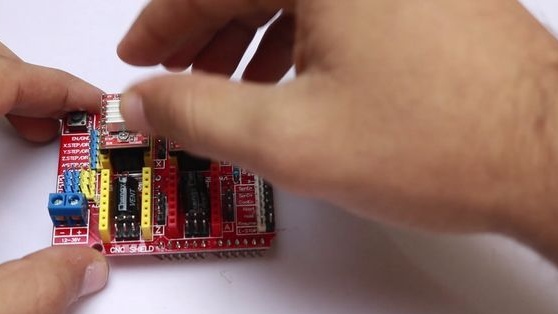
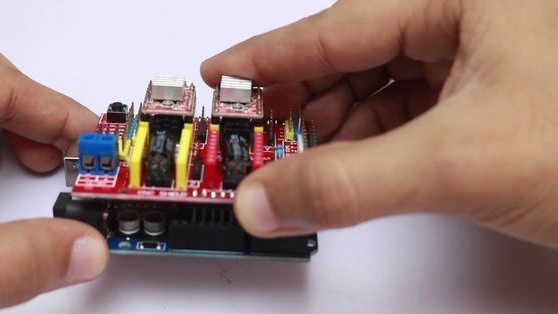
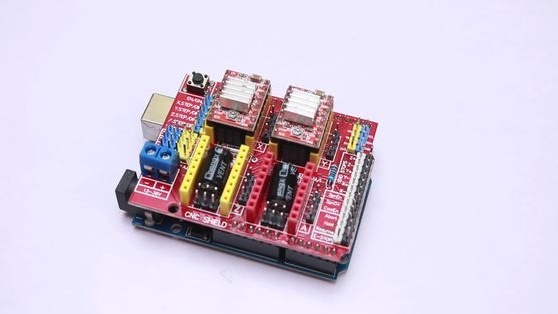
Instaluje kartę rozszerzeń na Arduino.
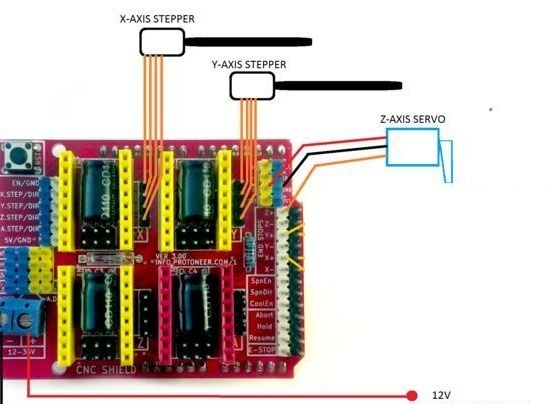
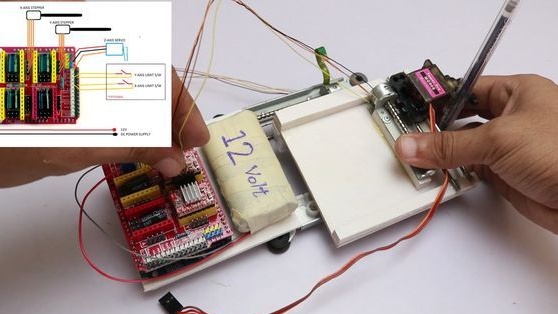
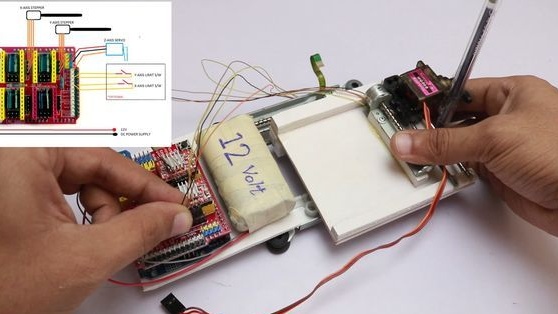
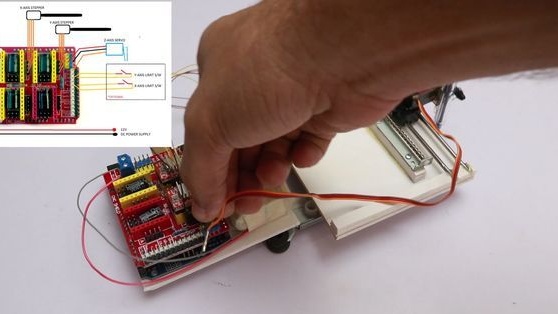
Krok piąty: Połącz
Instaluje baterię. Mocuje i łączy wszystkie elementy zgodnie z podanymi schematami.
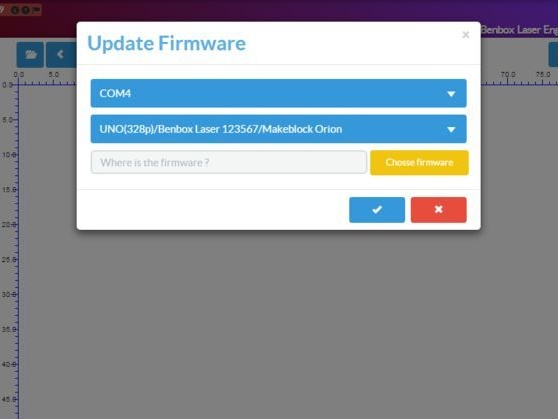
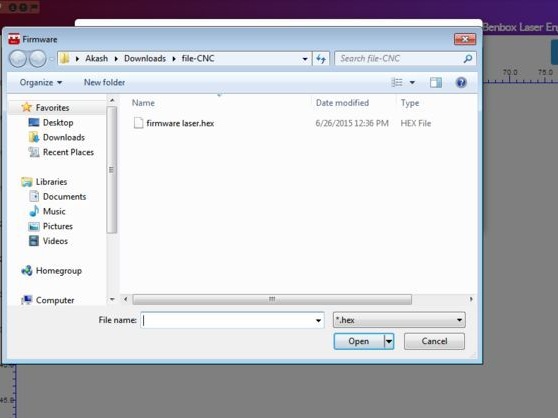
Krok szósty: oprogramowanie
Ładuje oprogramowanie. Otwiera oprogramowanie. Łączy złącze Arduino USB. Podczas aktualizacji oprogramowania wybiera COM (3.4 lub 5).
Ustawia parametry.
Pierwsza strona:
Port szeregowy: COM (3.4 lub 5)
Pióro do góry: 35
Pen Down: 22
Prędkość: 800 (możesz zwiększyć)
Czas: 200
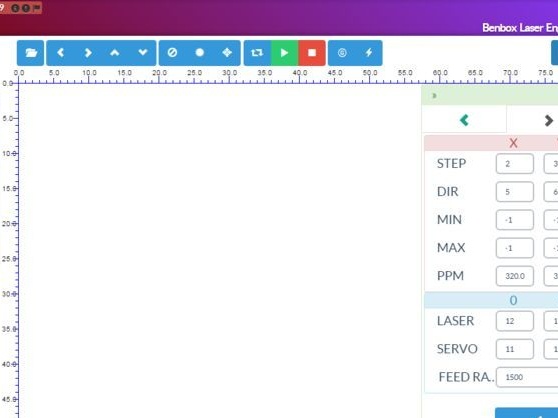
Druga strona:
Krok: x = 2 lata = 3
Reż: x = 5 lat = 6
Min: x = -1 y = -1
Max: x = -1 y = -1
Ppm: x = 320 y = 320
laser: 0 = 12 1 = 12
Serwo: 0 = 11 0 = 12
Feed Ra. : 1500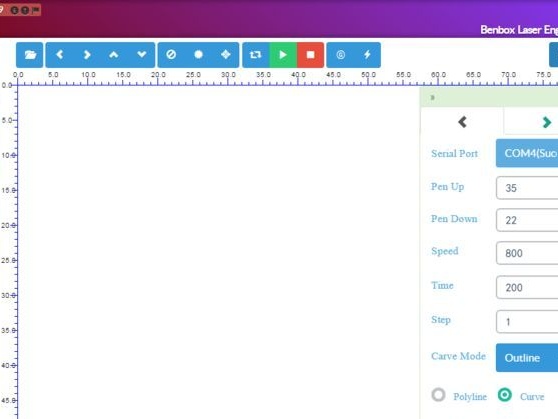
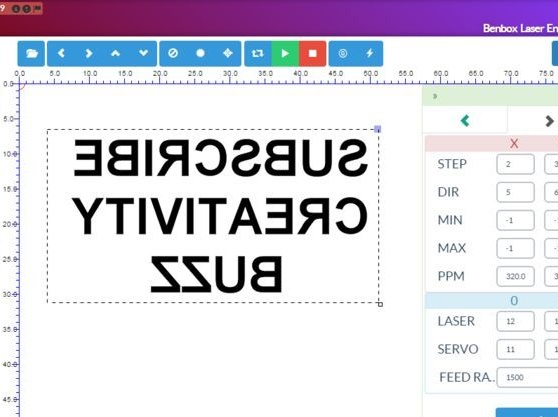
Artysta robota jest gotowy. Pozostaje wpisać tekst w polu i uruchomić program.
Cały proces tworzenia artysty robota można zobaczyć na filmie.