


Brałem udział w moim projekcie z instrukcji montażu Lego Technic 42049 i Lego Technic 42041. Reszta to moja improwizacja. Do kontroli użyję modułu Bluetooth powiązanego z urządzeniem z Androidem lub komputerem. Potrzebujemy więc:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Sterownik silnika L9110S
- 1 serwonapęd SG-90
- Moduł Bluetooth HC-05 lub równoważny
- USB-UART dla oprogramowania arduino
- Skrzynia biegów silnika 6v 1: 150 100 obr./min
- 2 diody LED
- 2 rezystory 150 omów
- Kondensator 10v 1000uF
- 2 grzebienie jednorzędowe PLS-40
- Cewka 68mkGn
- 6 akumulatorów NI-Mn 1,2v 1000mA
- Złącze tata-mama dwa piny do drutu
- Homutik
- Przewody o różnych kolorach
- lutowane
- Kalafonia
- lutownica
- Śruby 3x20, nakrętki i podkładki do nich
- Śruby 3x40
- Śruby 3x60
Krok 1 Montaż tylnej osi
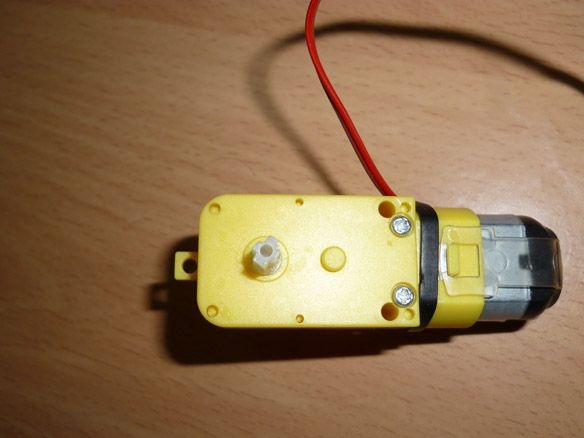
Poruszanie się do przodu - do tyłu odbywa się za pomocą motoreduktora z silnikiem 6 V, przełożenia 1: 150 i prędkości jałowej 100 obr / min. Możesz spróbować innego przełożenia, ale moim zdaniem jest to optymalne. Oś skrzyni biegów po obu stronach musi być nacięta w kształcie krzyża i nałożona na detale LEGO:
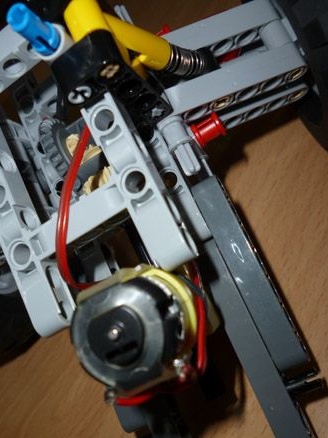
Następnie zbieramy podstawę tylnej osi zgodnie z instrukcjami Lego 42029 część 1, zaczynając od 3 stron do 8 włącznie. I dodaj kilka szczegółów, abyś mógł zainstalować silnik i skrzynię biegów.
Wyświetl plik online:
Wyświetl plik online:



Krok 2 Montaż osi przedniej
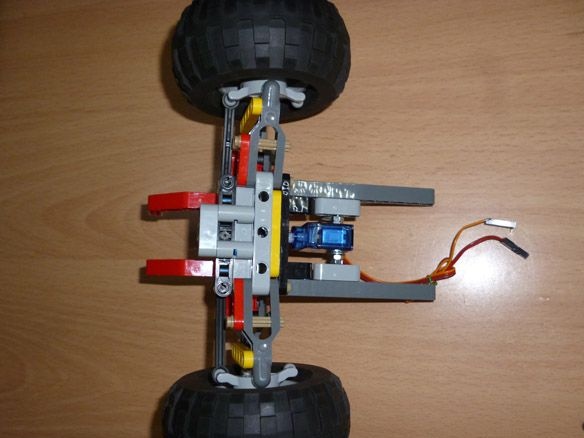
Montujemy przednią część zawieszenia zgodnie z instrukcjami Lego 42029 część 1, od strony 21 do 23. Bierzemy trapezoid z drugiej części Lego od strony 6 do 11. Serwo SG-90 nadaje się dobrze do obracania kół. Aby naprawić go w naszym modelu, należy ostrożnie wywiercić, aby nie dotknąć wewnętrznych części serwomechanizmu, otworu przelotowego o średnicy 3,2 mm lub po prostu przeciąć go nożem biurowym. A także odciąć wystające części („skrzydełka” do montażu). Wkładamy śrubę do wykonanego otworu i mocujemy za pomocą nakrętek. Na wale serwa nakładamy dźwignię z wkręconą częścią z klocków LEGO:





Krok 3 Montaż podstawy i kabiny
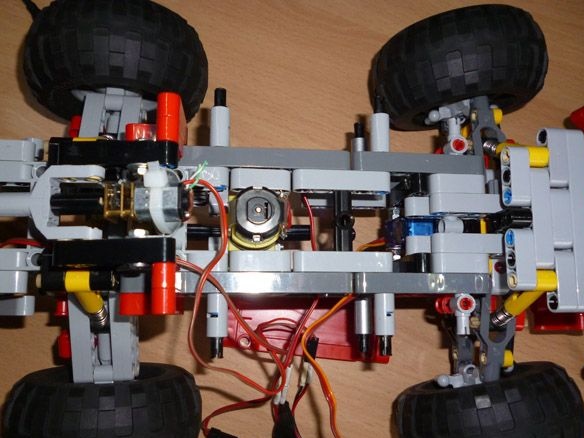
Łączymy oba mosty, jak pokazano na zdjęciu:
Montujemy kabinę zgodnie z instrukcjami Lego 42041. Począwszy od stron 39 do 47 pierwszej części. Dalej od strony 5 do 28 drugiej części. Jak również zderzak na stronach 38–43 drugiej części instrukcji.
Wyświetl plik online:
Wyświetl plik online:


Wyświetl plik online:
Wyświetl plik online:
Krok 4 Elektryka
Do kontroli użyjemy Arduino Pro Mini i modułu Bluetooth. Pro Mini można zastąpić dowolną inną płytą Arduino. Wybrałem Pro Mini, więc jest najmniejszy. Sterownik silnika jest potrzebny do podłączenia silnika.
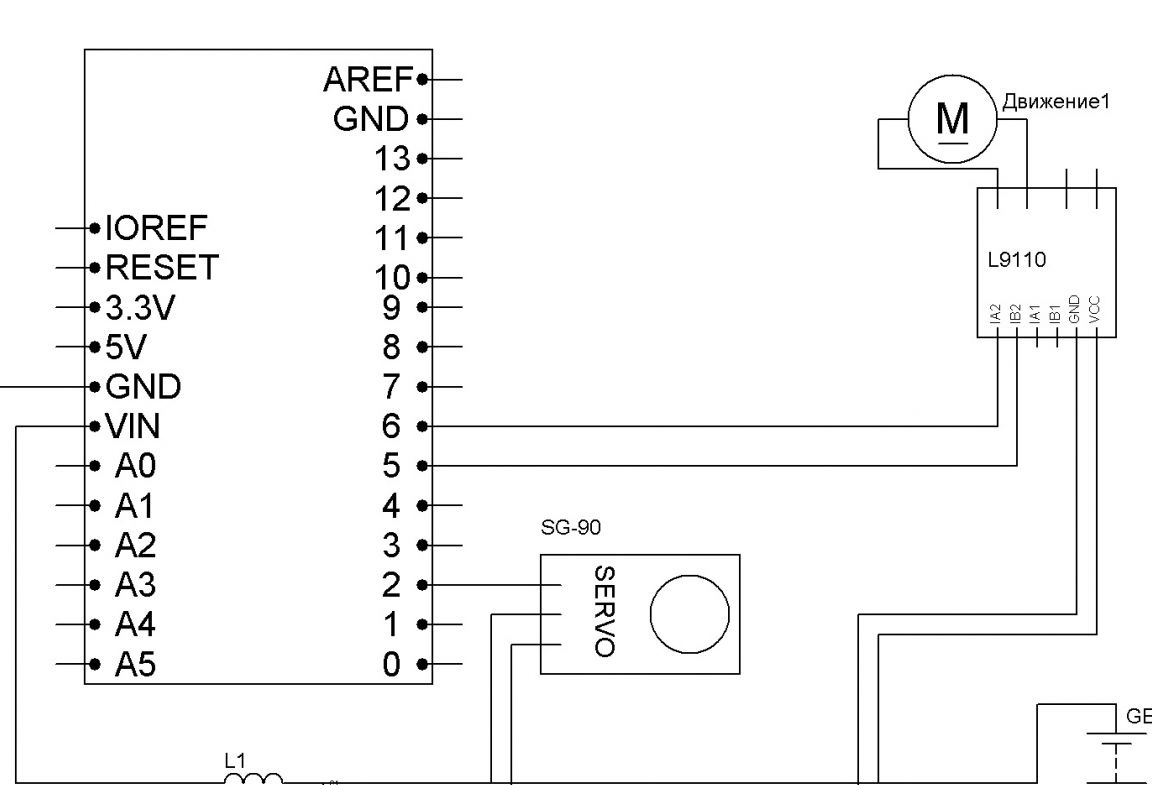
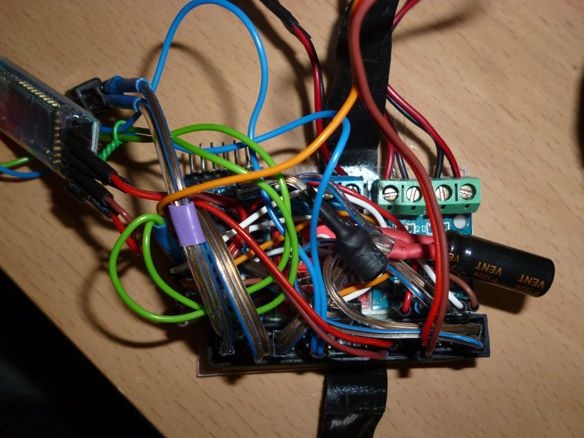
Połączenie wszystkich komponentów przewodami matka-matka Dupont. Zasilanie - 6 akumulatorów NI-Mn 1,2v 1000mA połączonych szeregowo. Kondensator o dowolnej niskiej mocy, cewka również znajdziesz, musisz ustabilizować moc mikrokontrolera. Anody dwóch diod LED są podłączone do 4 pinów arduino, katody do GND. Rezystory są wybrane dla zastosowanych diod LED. Dla wygody zwinąć baterie za pomocą taśmy.

Przyklejamy to wszystko na taśmie dwustronnej na podstawie:
Umieszczamy naszego elektryka między kołami i zamykamy:
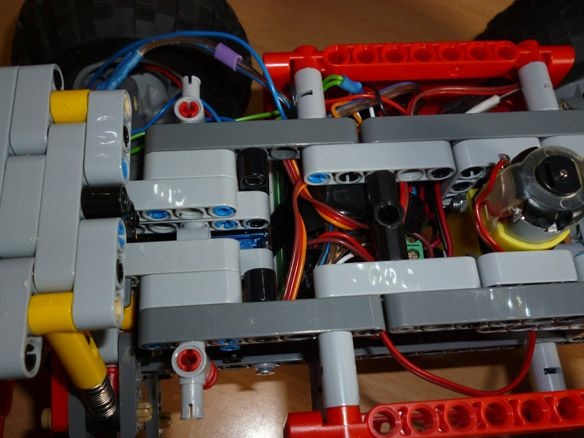
Dodaj kilka pociągnięć:


Krok 5 Konfiguracja Bluetooth
Najbardziej przystępnymi obecnie modułami Bluetooth są HC-05 i HC-06. Są obfite w chińskich sklepach internetowych. Różnice między nimi polegają na tym, że pierwsze mogą działać zarówno w trybie master (slave), jak i w trybie slave (master). Drugi jest urządzeniem wyłącznie niewolniczym. Innymi słowy, HC-06 nie może wykryć sparowanego urządzenia i nawiązać z nim połączenia, może jedynie słuchać urządzenia master.
Krótka charakterystyka modułów:
- Układ Bluetooth - BC417143 wyprodukowany przez
- protokół komunikacyjny - Specyfikacja Bluetooth v2.0 + EDR;
- promień działania - do 10 metrów (poziom mocy 2);
- Kompatybilny ze wszystkimi adapterami Bluetooth obsługującymi SPP;
- Ilość pamięci flash (do przechowywania oprogramowania układowego i ustawień) - 8 Mbit;
- częstotliwość sygnału radiowego - 2,40 .. 2,48 GHz;
- interfejs hosta - USB 1.1 / 2.0 lub UART;
- pobór mocy - prąd podczas komunikacji wynosi 30-40 mA. Średnia wartość prądu wynosi około 25 mA. Po ustanowieniu połączenia pobierany prąd wynosi 8 mA. Nie ma trybu uśpienia.
Zwykle moduły są sprzedawane jako dwie płytki lutowane razem. Mniejszy to moduł fabryczny, szeroko stosowany w różnych elektroniczny urządzenia. Large - specjalna płyta chlebowa do majsterkowania.
Tak wyglądają moduły DIY HC-05 i HC-06:
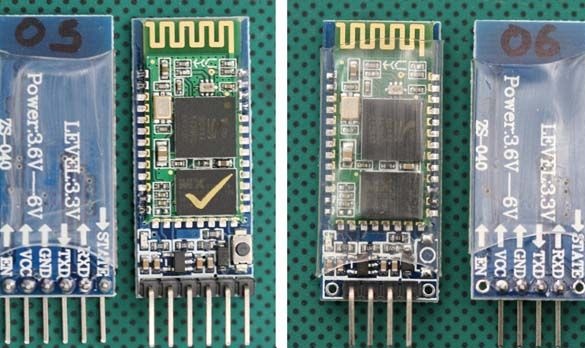
Zasadniczo możesz użyć dowolnego modułu. Moduł bez płyty chlebowej kosztuje mniej, ale wtedy musisz zadbać o zasilanie 3,3 V dla modułu i dręczyć się przez lutowanie przewodów do modułu. Moim zdaniem wybrałem optymalny stosunek ceny do funkcjonalności HC-06.
Łączymy w następujący sposób:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5 V - VCC
GND –GND
Aby zapewnić poprawne działanie, moduł musi zostać skonfigurowany. Skonfigurujemy polecenia AT wprowadzone w oknie terminala. Podam przykład konfiguracji modułu HC-05. Jeśli masz inne ustawienie, może być inne. Aby nasz moduł mógł odbierać polecenia, najpierw flashujemy Arduino za pomocą następującego oprogramowania:
W tym przypadku Arduino działa jako pomost między komputerami a modułem. W oprogramowaniu używam biblioteki SoftwareSerial. Przy dużych prędkościach działa niestabilnie. Jeśli chcesz mieć wysoką prędkość, możesz podłączyć moduł bezpośrednio do kontaktów Arduino RX i TX i przepisać oprogramowanie wewnętrzne. Ale w moim przypadku będziemy pracować z modułem z prędkością 9600. Tak więc po oprogramowaniu układowym otwórz terminal i wprowadź:
„AT” (bez cudzysłowów) powinna pojawić się odpowiedź „OK” (oznacza to, że wszystko jest poprawnie podłączone i moduł działa)
„AT + BAUD96000” (bez cudzysłowów) powinna pojawić się odpowiedź „OK9600”.
Jeśli masz poprawną odpowiedź, przejdź do następnego kroku.
Krok 7 Oprogramowanie układowe
Do napisania oprogramowania i samego oprogramowania używam Arduino IDE. Obecna wersja na dziś to 1.8. W rzeczywistości oprogramowanie układowe:
Krok 8 Skonfiguruj telefon.
Na telefonie z Androidem musisz zainstalować program do sterowania robotem przez Bluetooth. Jest ich dużo. Możesz wpisać „Bluetooth Arduino” w Google Play i wybrać według własnego uznania. Podobał mi się kontroler BT. Pobierz i zainstaluj na swoim telefonie lub tablecie z Androidem. Następnie za pomocą ustawień Androida musisz nawiązać połączenie z naszym modułem. Hasło do połączenia to „1234” lub „0000”. Następnie skonfiguruj program dla odpowiednich poleceń. Lista znajduje się poniżej.
Krok 9 Konfiguracja komputera (w razie potrzeby)
W razie potrzeby lub po prostu dla wygody możesz użyć komputera lub laptopa. Aby to zrobić, komputer musi mieć Bluetooth. Nawiązujemy komunikację z naszym modułem za pomocą elementów sterujących na komputerze. Następnie potrzebujemy terminala do wysyłania poleceń. Wszelkie dogodne dla Ciebie.Po zarejestrowaniu oprogramowania układowego sterowanie odbywa się za pomocą następujących przycisków (poleceń):
W - do przodu
S - powrót
A - w lewo
D - racja
F - stop
G - kierownica
K - reflektory
L - reflektor wyłączony
Ciągłe wprowadzanie poleceń jest niewygodne, dlatego polecam używanie programu do wysyłania poleceń. Używam Z-Controller. W programie wybierz port (port COM, przez który nawiązywane jest połączenie) i skonfiguruj klawisze poleceń. Ustaw bezczynny i intuicyjny.
