

Miłośnicy dnia Arduino! W Internecie widziałem dość interesującego i spektakularnego robota (lub urządzenie, które możesz nazwać, jak chcesz), który „gra” w grę Stak, korzystając z tych samych zasad działania, z których możesz zrobić robota, który może grać w gry, takie jak geometria, pianino i inne, w których potrzebujesz Wbij sekwencję w ekran. Co zrobiłem, proszę ocenić w ankiecie poniżej.
Jeśli ktoś jest zainteresowany, oto film z pracy tego robota:
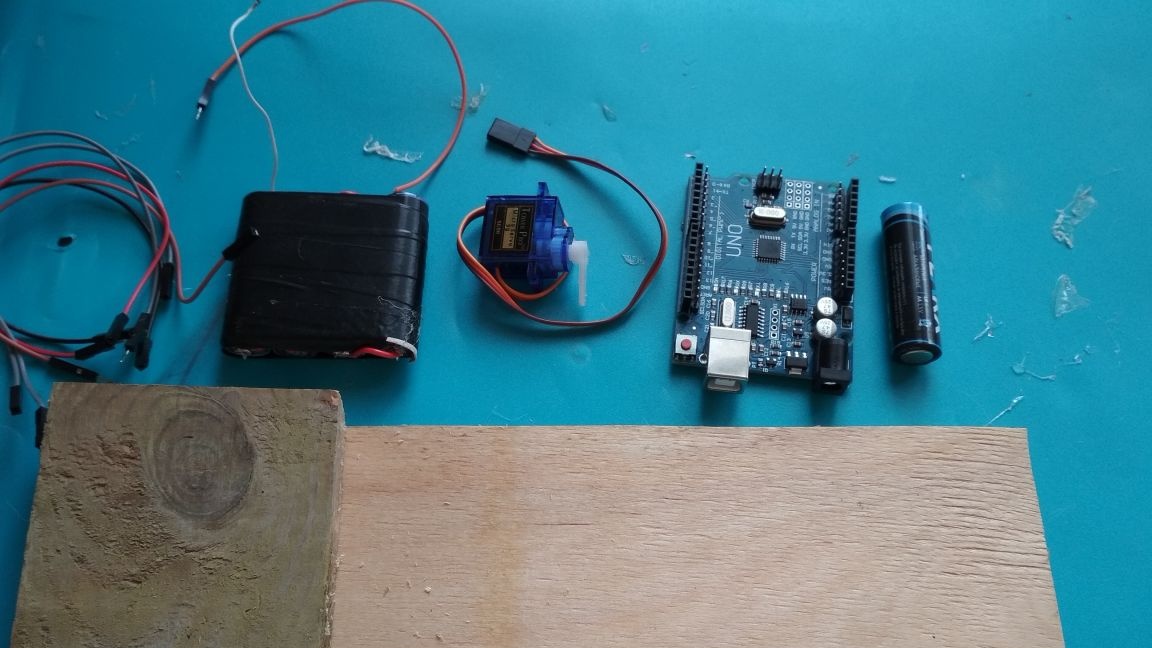
I tak do tego „robota” potrzebujemy:
płatność Arduino Nie
- przewody łączące typu „ojciec-matka” lub „ojciec-ojciec”
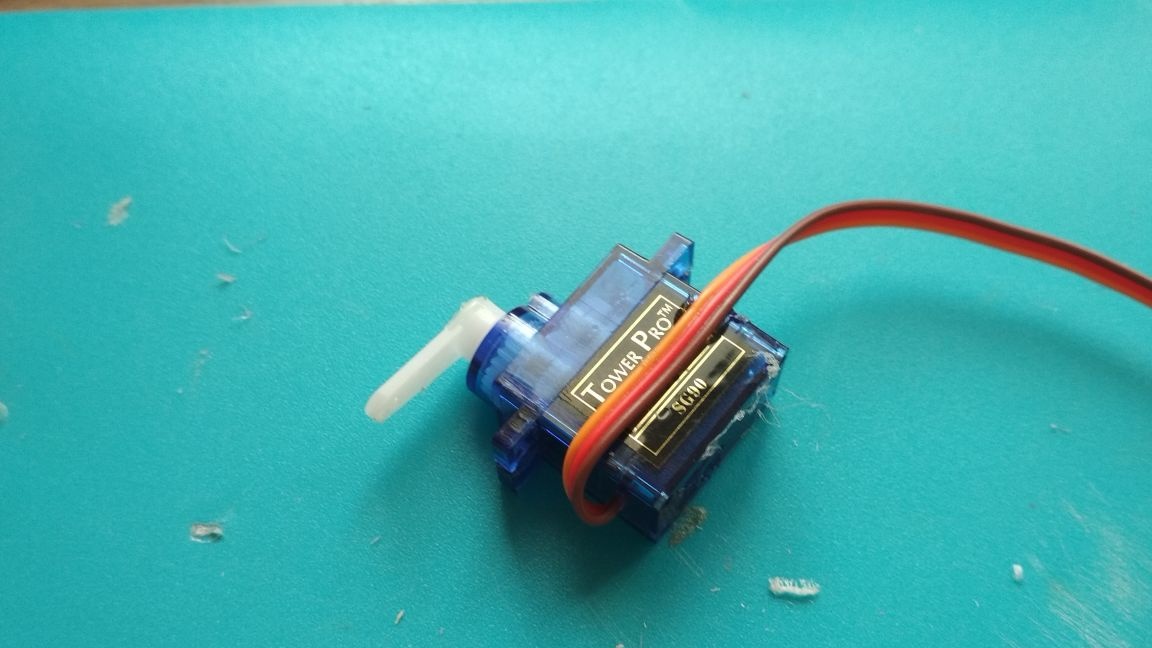
-usługa
- kawałek sklejki
- kawałek deski o grubości około 1 cm, najważniejsze jest to, że dwa razy jest grubszy niż sklejka
kij do lodów
rysik
Folia (jeśli nie ma rysika)
-bateria (jeśli nie ma rysika)
- zasilacz na 6-12 woltów (używam 4 palców połączonych szeregowo)
Z narzędzi, których potrzebujemy:
nożyczki
klej termiczny
A więc pierwszą rzeczą do zrobienia jest wycięcie kawałka dwa razy większego niż telefon z kawałka sklejki, możesz go powiększyć i musisz wyciąć kawałek wielkości telefonu z planszy (zrobiłem nieco inne rozmiary, ale to wcale nie jest krytyczne). Następnie przyklejamy nasze puste miejsca, jak pokazano na zdjęciu:

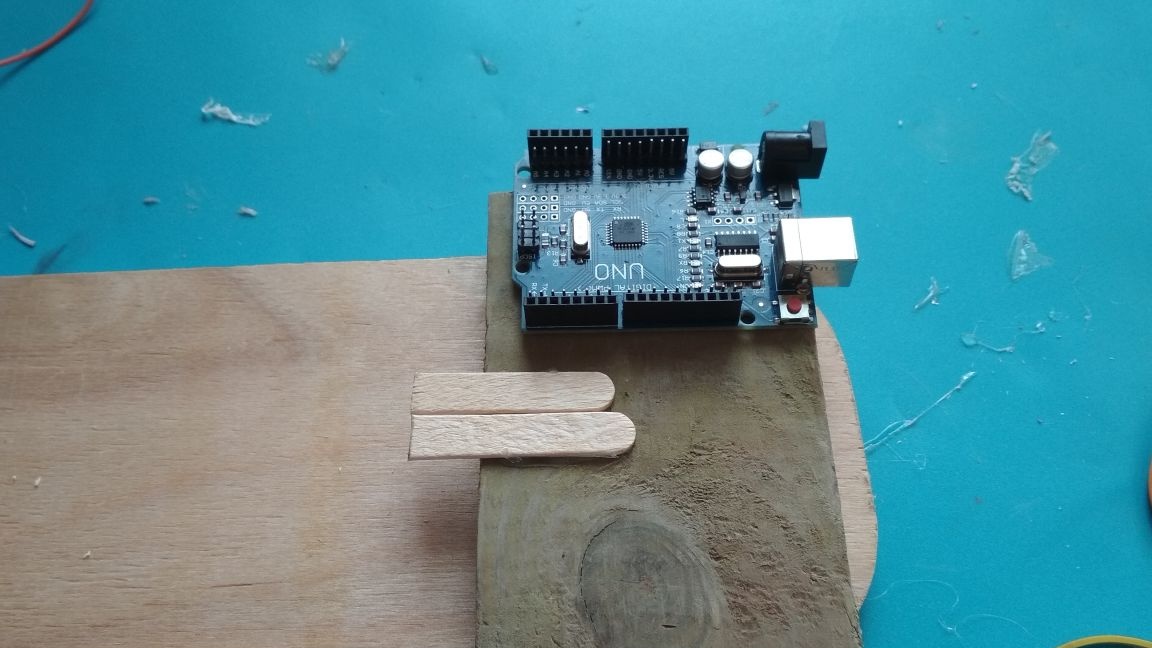
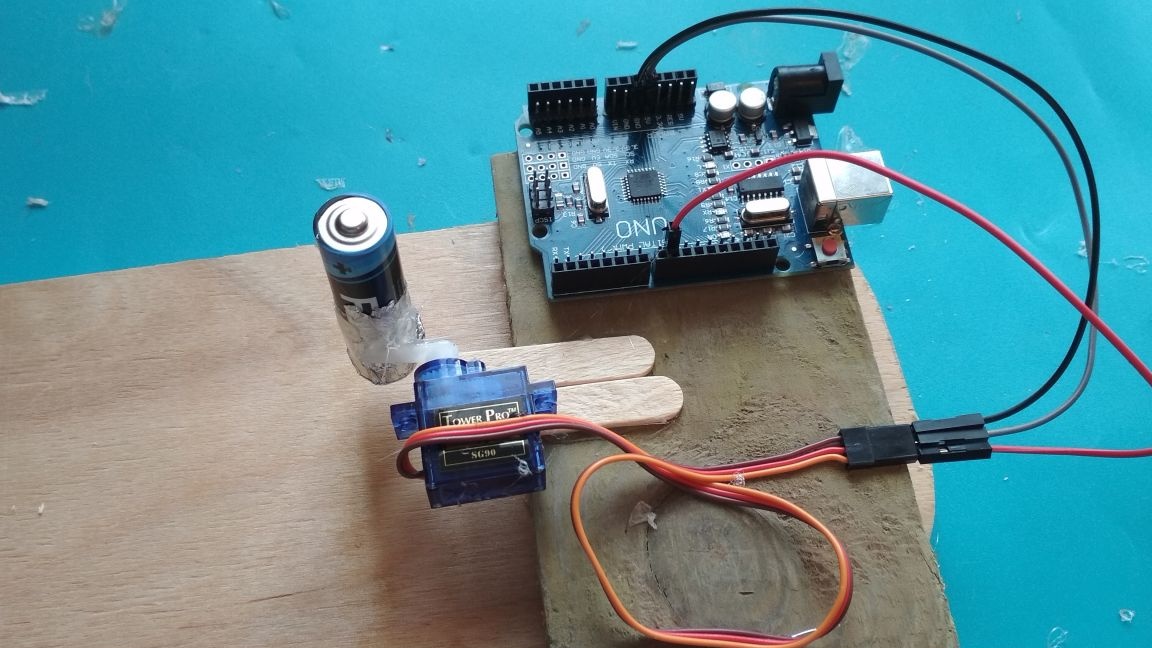
Weź kij do lodów i pokrój go na około połowę:

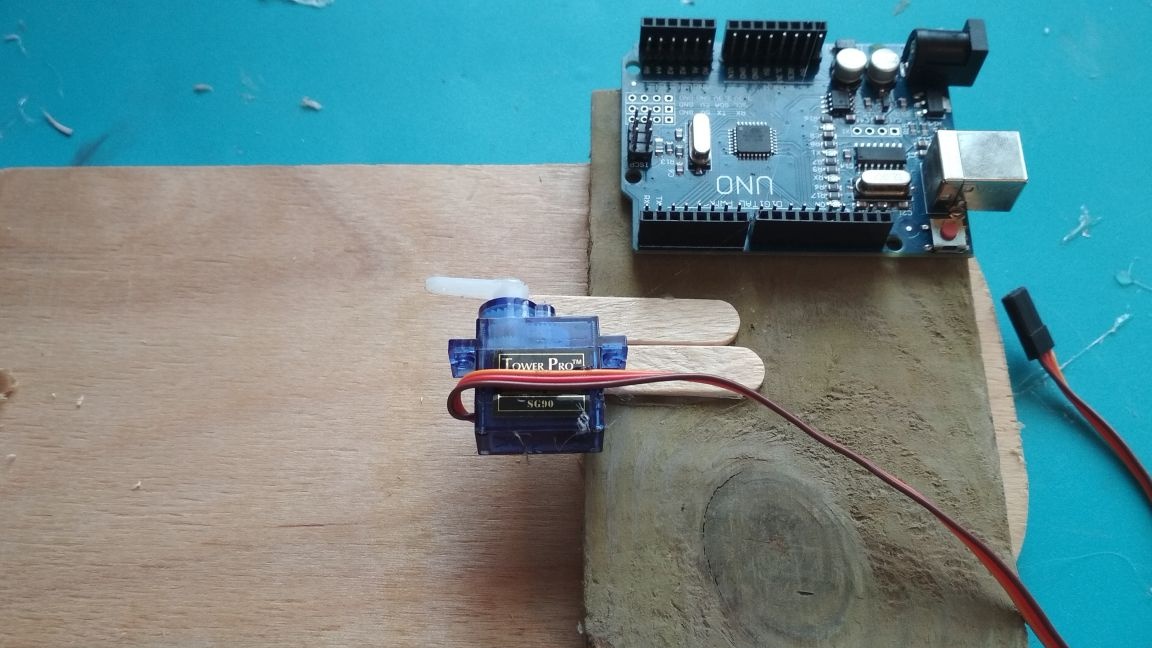
Przyklej je na środku deski, od strony sklejki, jak pokazano na zdjęciu:

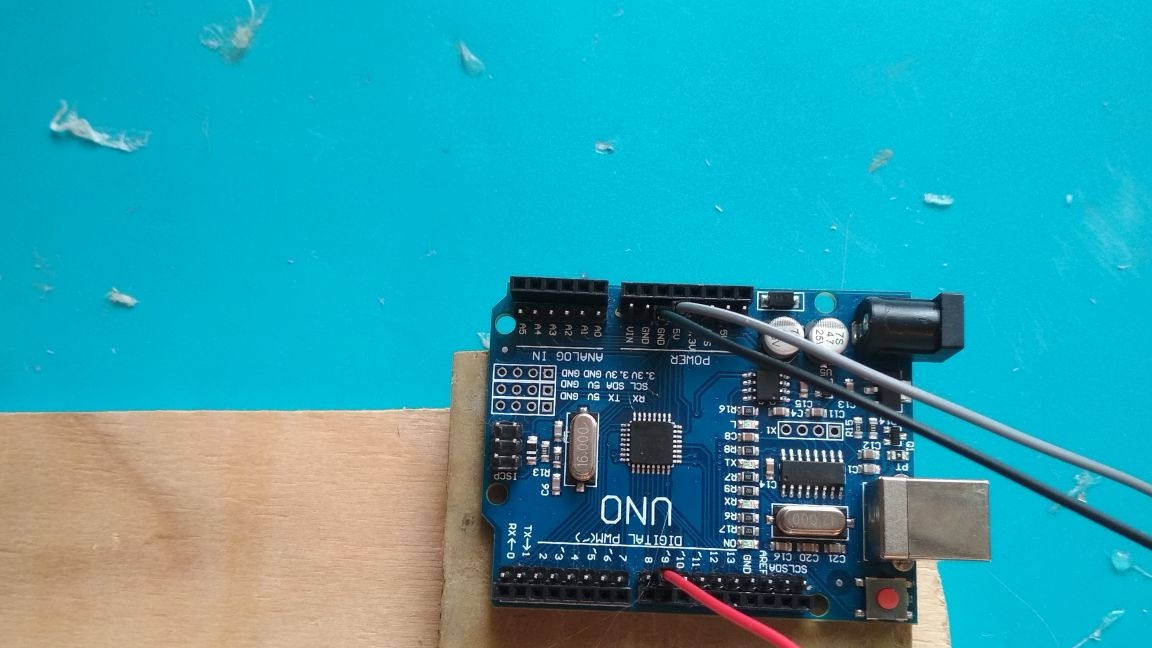
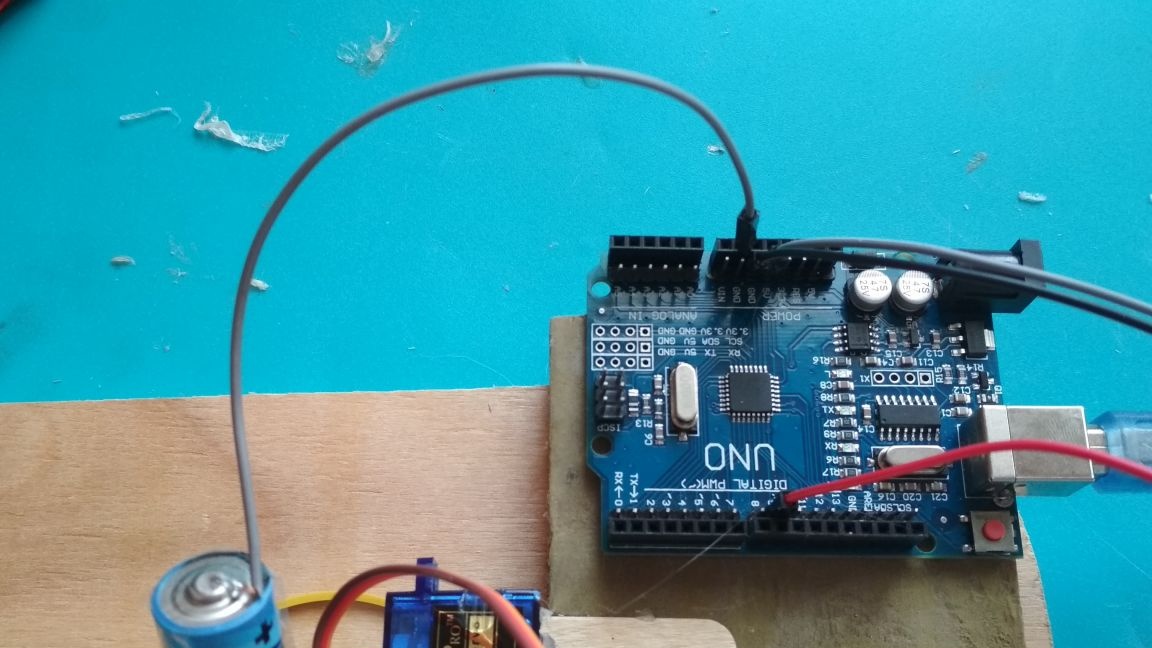
Przyklejamy tablicę Ardino Uno od krawędzi planszy:
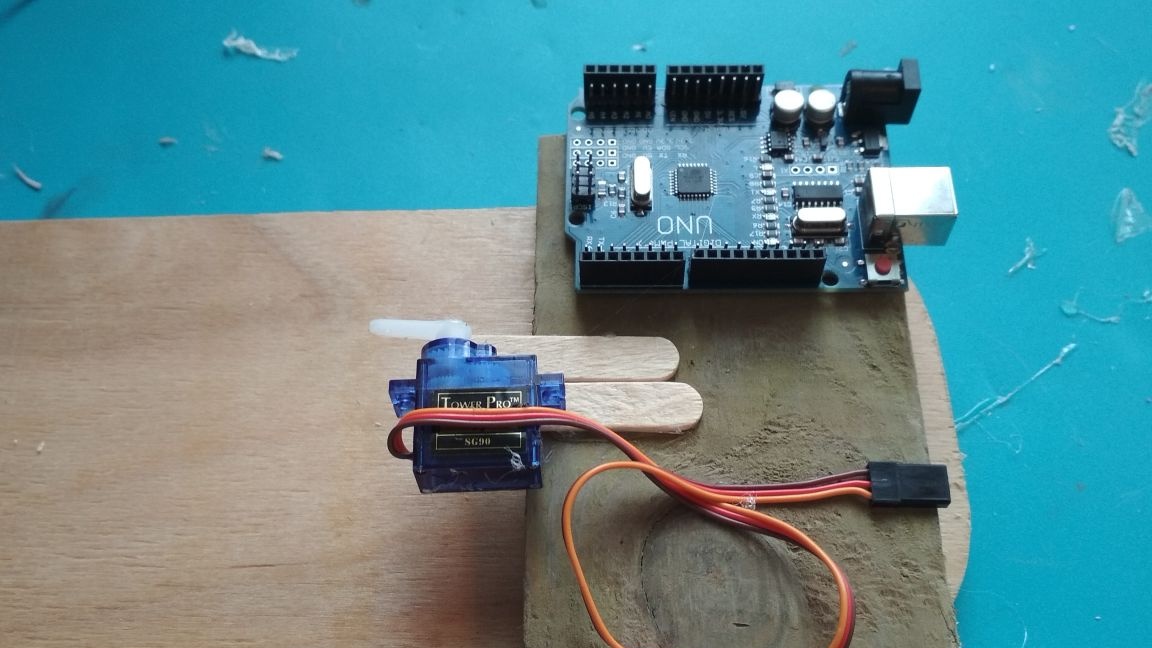
Bierzemy serwomotor i przyklejamy przewody, aby nie przeszkadzały:
Przyklej siłownik do końca połówek paluszków do lodów:
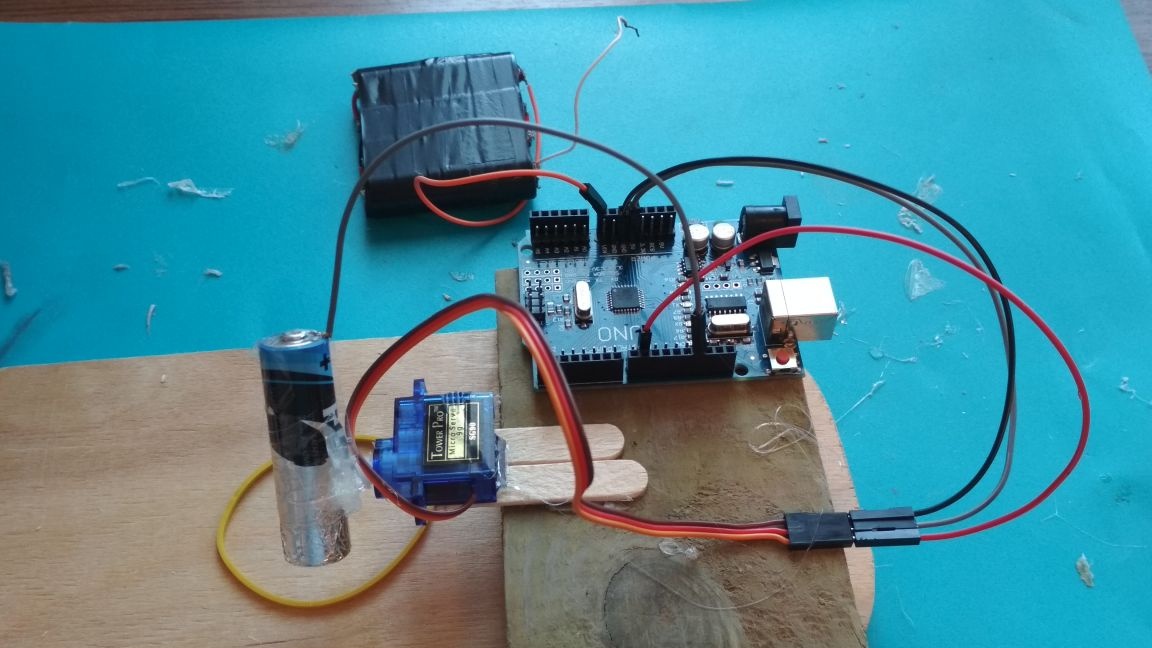
Układamy przewody i przyklejamy moc serwomotoru do krawędzi płyty:
Dodaj 3 druty tata-mama, najlepiej w różnych kolorach, aby się nie pomylić
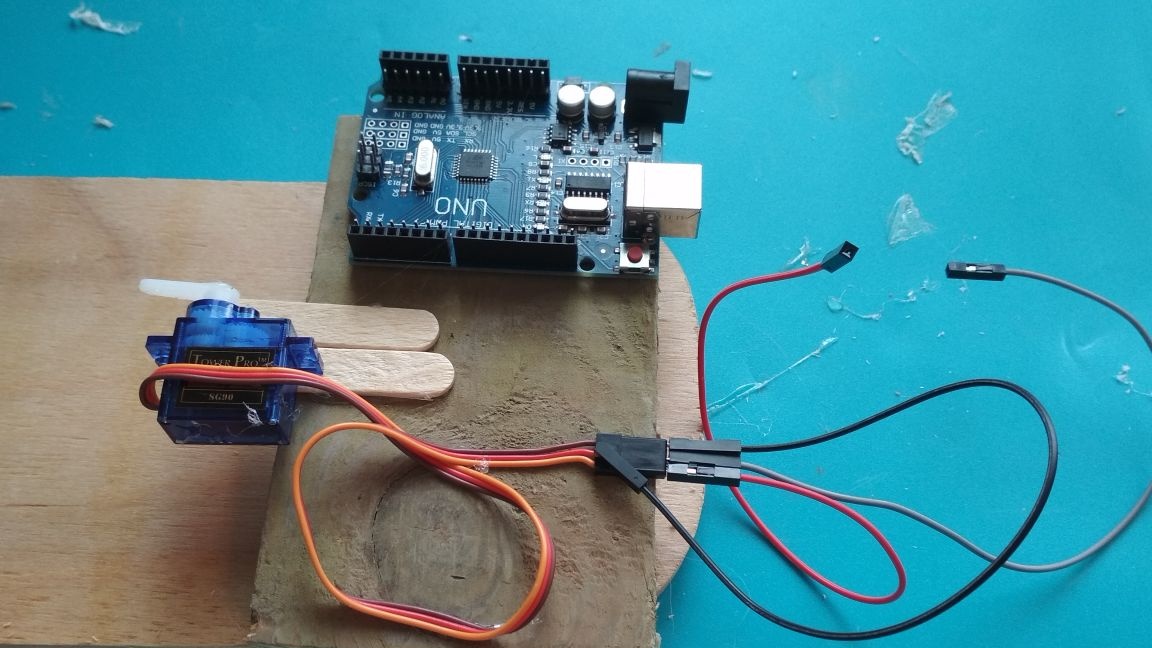
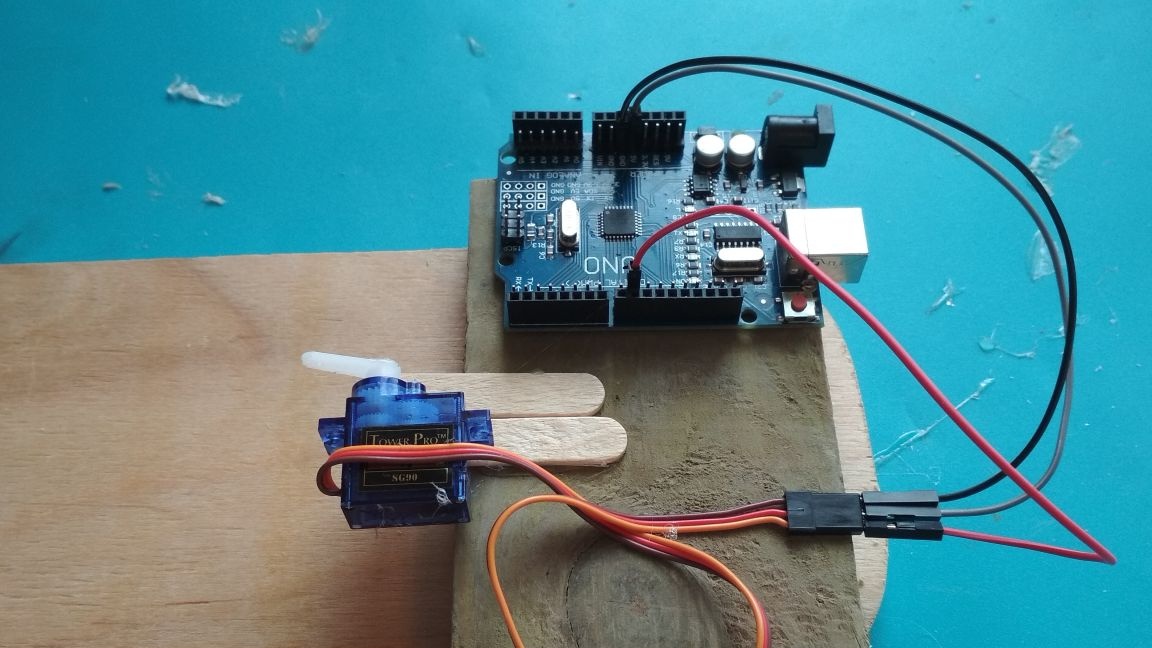
Podłączamy serwonapęd do płyty Arduino w następujący sposób:
brązowy drut do GND
-Red drut do 5v
- pomarańczowy przewód do 9 „cyfrowego pinu”
Jeśli nie masz rysika, takiego jak mój, nie rozpaczaj, jest to bardzo proste.
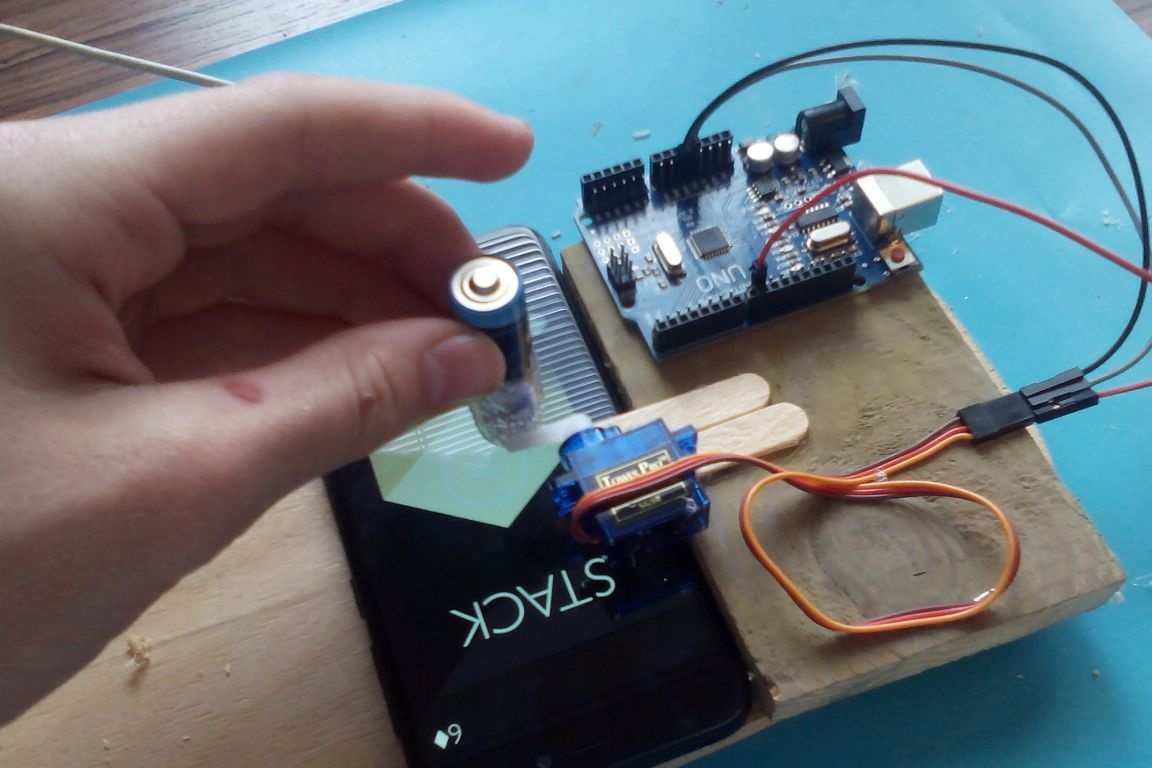
Bierzemy zwykłą baterię palca i stronę ujemną tak mocno, jak to możliwe, owijamy ją folią, a następnie przyklejamy bardzo mocno:

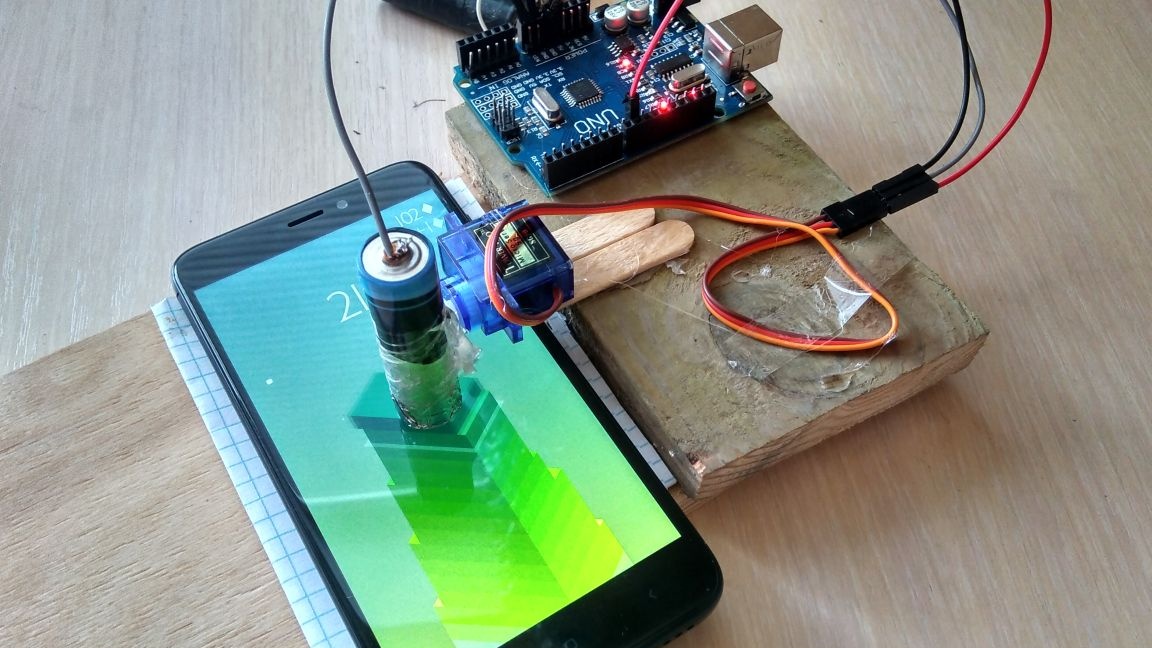
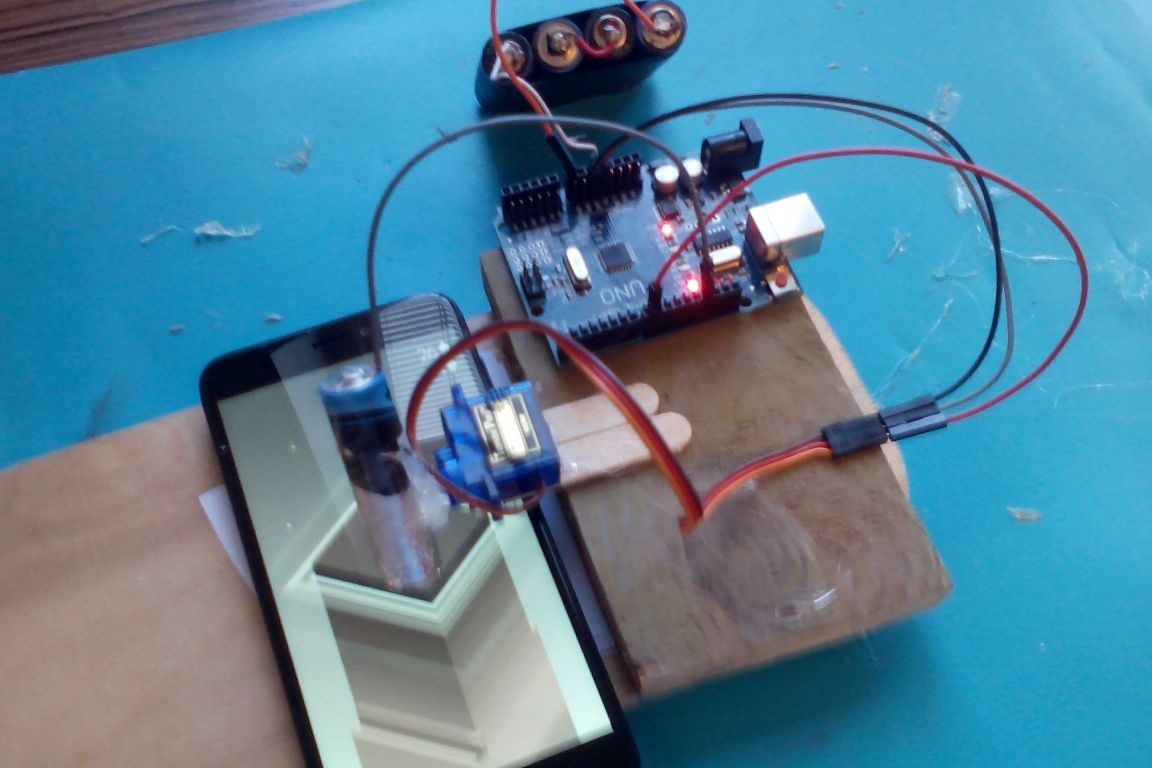
Teraz musisz położyć telefon na sklejce pod serwomotorem, przymocować akumulator na górze i zanotować, na jakim poziomie przykleimy nasz „rysik”. Po zanotowaniu wszystkiego mocno przyklej „rysik” do dźwigni serwomotoru, ściśle pod kątem 90 stopni (ten sam kąt powinien być przy nakładaniu „rysika” na telefon, gdy go mierzyliśmy). Wszystko powinno działać jak pokazano na zdjęciu:

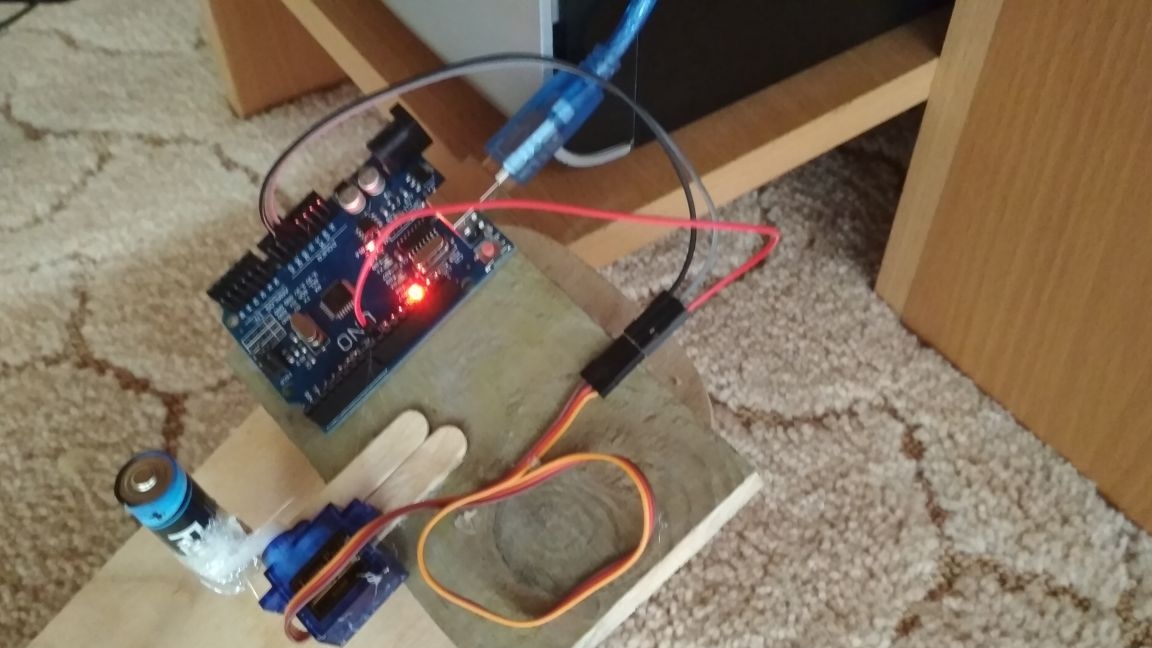
Teraz podłączamy naszego „robota” do komputera przez port skonfigurowany w Arduino IDE, uruchamiamy poprzednio nazwany Arduino IDE i kopiujemy poniższy szkic, a następnie klikamy przycisk „pobierz”. Jeśli wszystko zostanie wykonane poprawnie, szkic zostanie załadowany bez żadnych błędów i po kilku sekundach siłownik rozpocznie pracę. Jeśli masz znaczące różnice w rozmiarach rysika i siłownika, zrób ten szkic dla siebie, jest to dość proste.
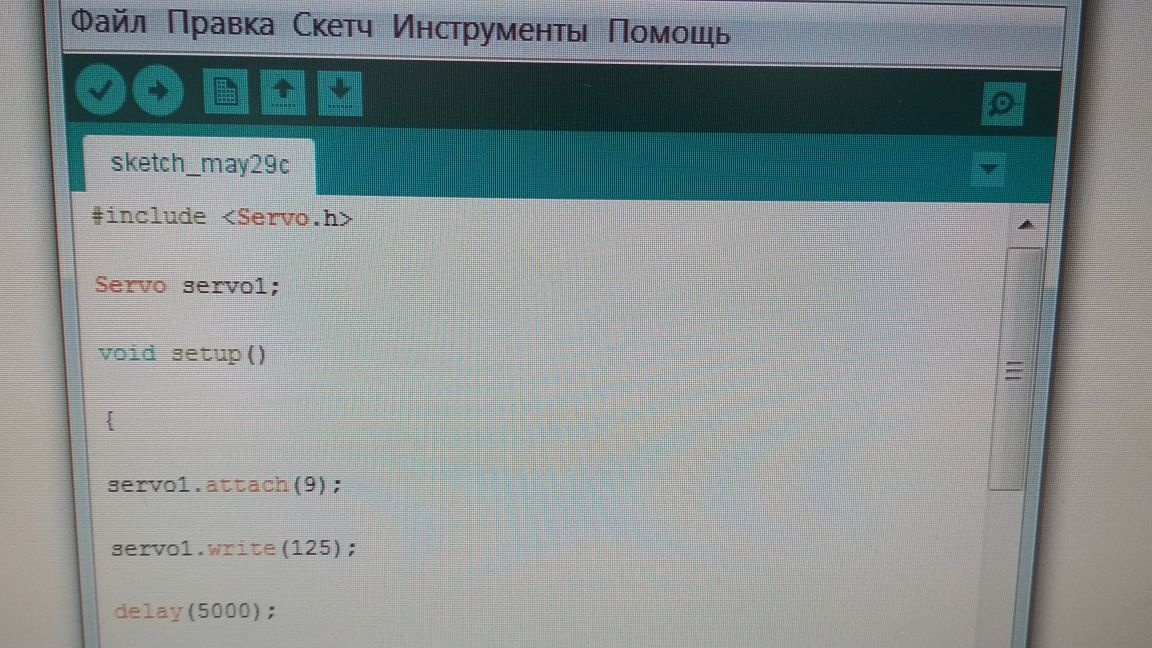
Oto szkic:
#include
Serwo serwo1;
void setup ()
{
servo1.attach (9);
servo1.write (125);
opóźnienie (5000);
servo1.write (90);
opóźnienie (200);
servo1.write (125);
opóźnienie (750);
}
void loop ()
{
servo1.write (90); // 1
opóźnienie (200);
servo1.write (125);
opóźnienie (600);
}Za pomocą taśmy samoprzylepnej lub taśmy elektrycznej nawijamy odizolowaną stronę drutu typu „matka do matki” z odciętym wyjściem „matki” na plus strony naszego „rysika” i przesyłamy ten drut do Gnd na Arduino:
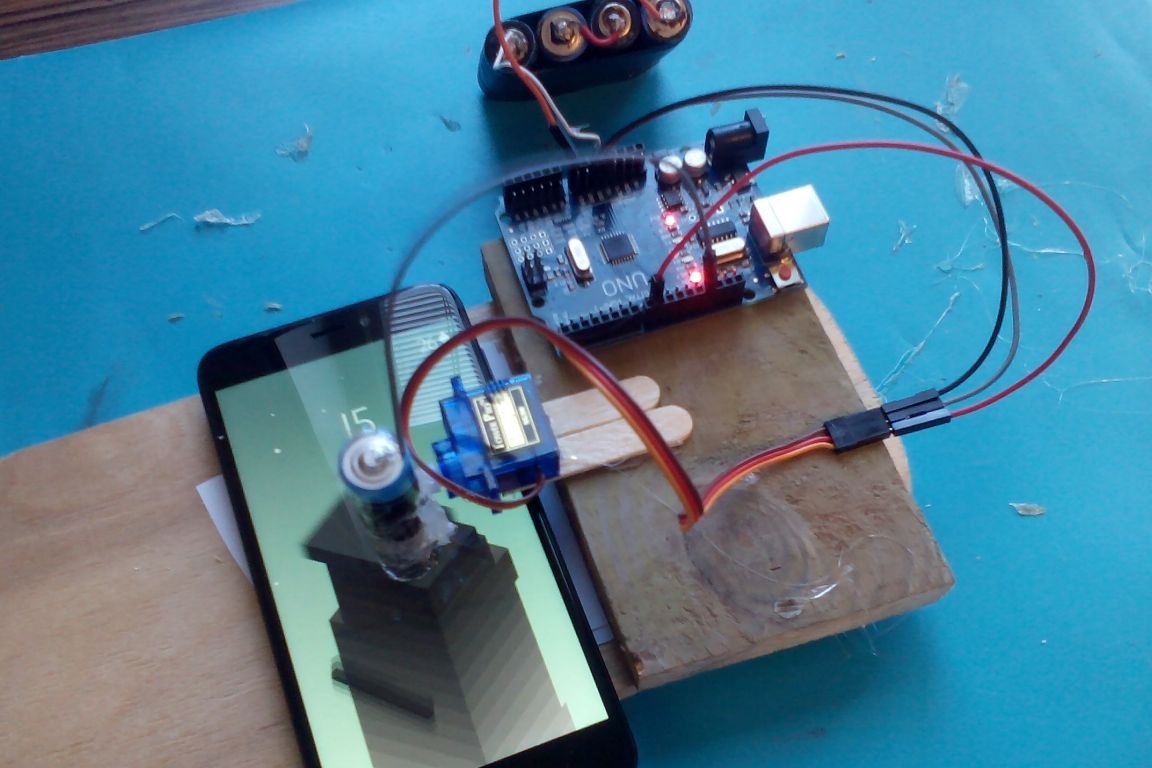
Cóż, to wszystko! Nasze proste robot gotowe i pozostaje tylko przetestować! Aby to zrobić, umieść telefon pod rysikiem, uruchom aplikację Stak i umieść telefon tak, aby znajdował się nad przyciskiem „play”, co jest wskazane strzałką, podłączamy zasilanie do arduino za pomocą specjalnego adaptera lub przekażemy plus z naszej „baterii” do Uin na Arduino i minus do gnd. po podłączeniu zasilania nasz robot natychmiast zaczyna „grać”. I chociaż ze względu na fakt, że nie używałem zwykłego rysika, ale baterii, nasz robot dość często nie wchodził w tempo i spudłował, „grał przez długi czas. Jeśli wszystko zostanie wykonane bardzo dokładnie, będzie grał do momentu, aż telefon spadnie.

Dziękujemy wszystkim za uwagę!