


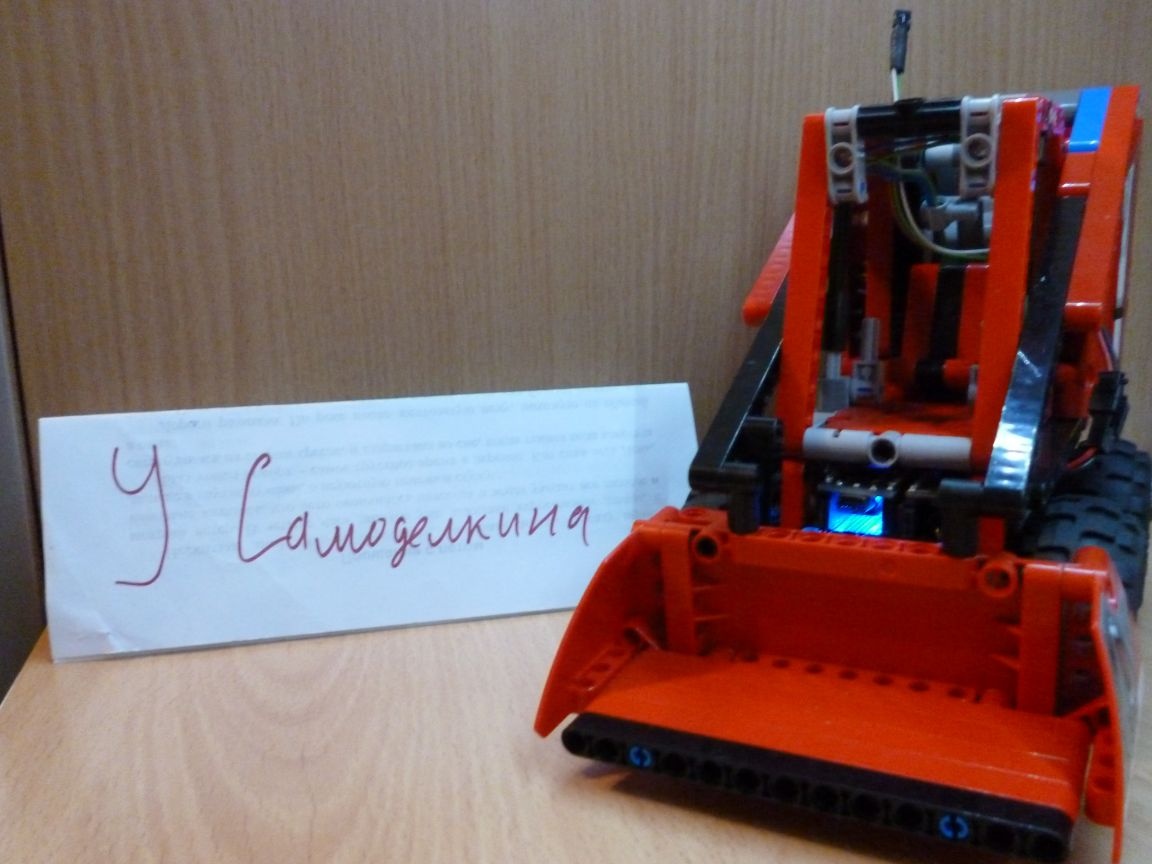
Biorąc technikę Lego od mojego syna i do domu Arduino Nano zaczął łączyć tych projektantów.
Będziemy potrzebować:
- Lego Technic (zestawy 42029 i 42033)
- Arduino Nano (link do tablicy)
- DRV 8833
- 2 serwonapędy SG-90
- odbiornik IR
- silnik przekładniowy
- 2 diody LED
- 2 rezystory 150 omów
- Kondensator 10v 1000uF
- 2 grzebienie jednorzędowe PLS-40
- 2 złącza PBS-20
- Cewka 68mkGn
- 4 baterie NI-Mn 1.2v 1000mA
- Złącze tata-mama dwa piny do drutu
- Homutik
- Przewody o różnych kolorach
- lutowane
- Kalafonia
- lutownica
- Śruby 3x40 oraz nakrętki i podkładki do nich
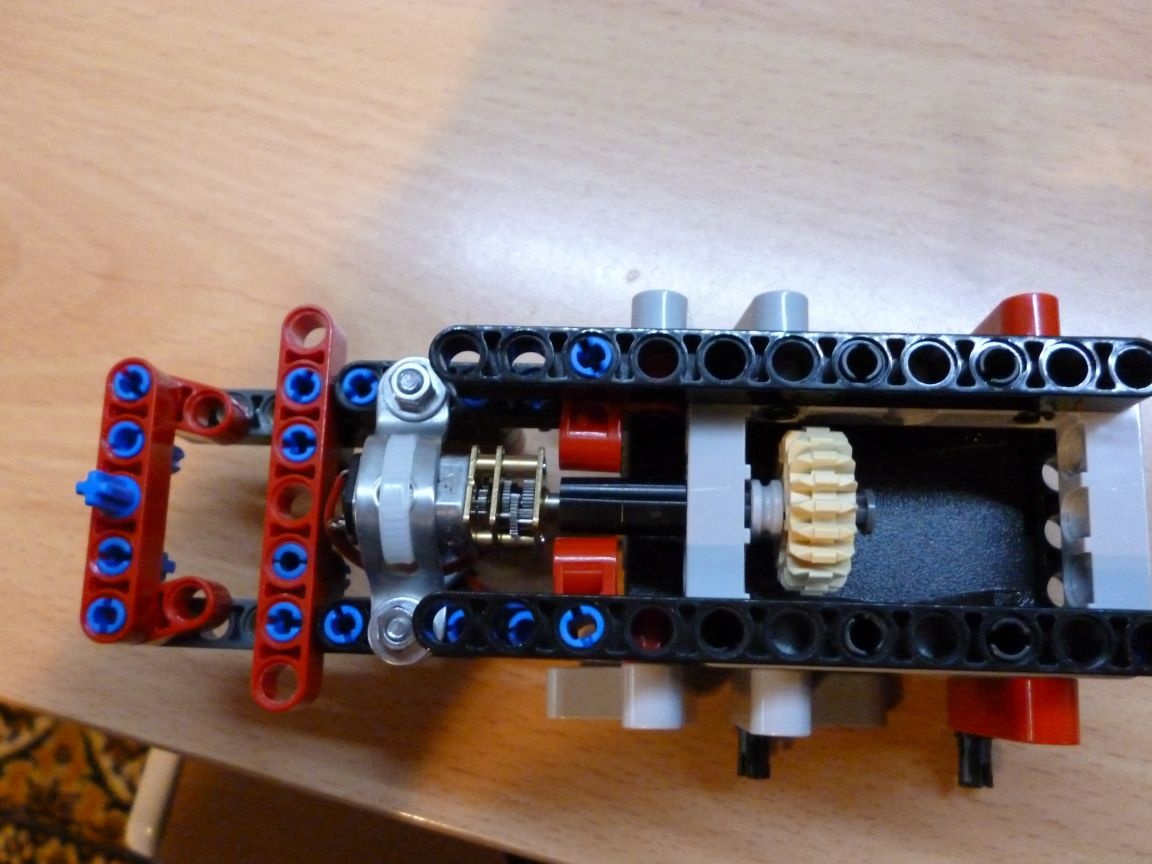
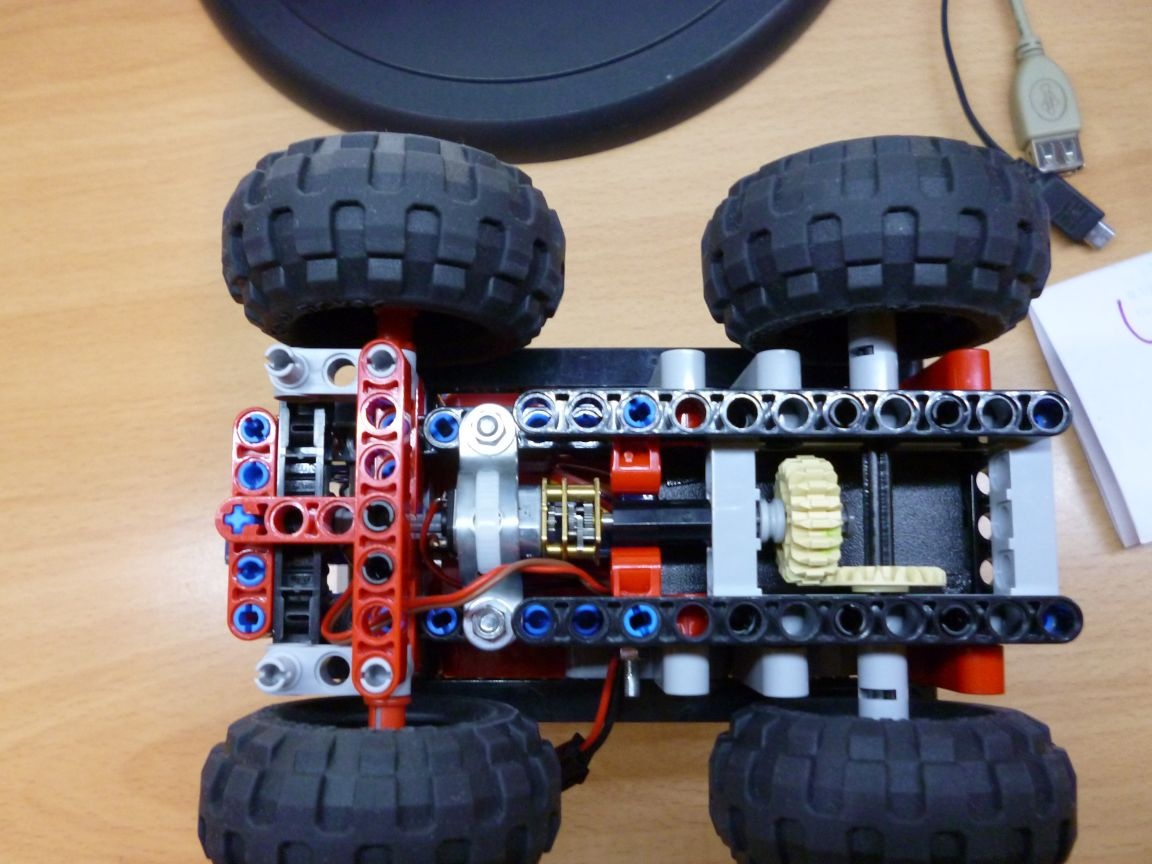
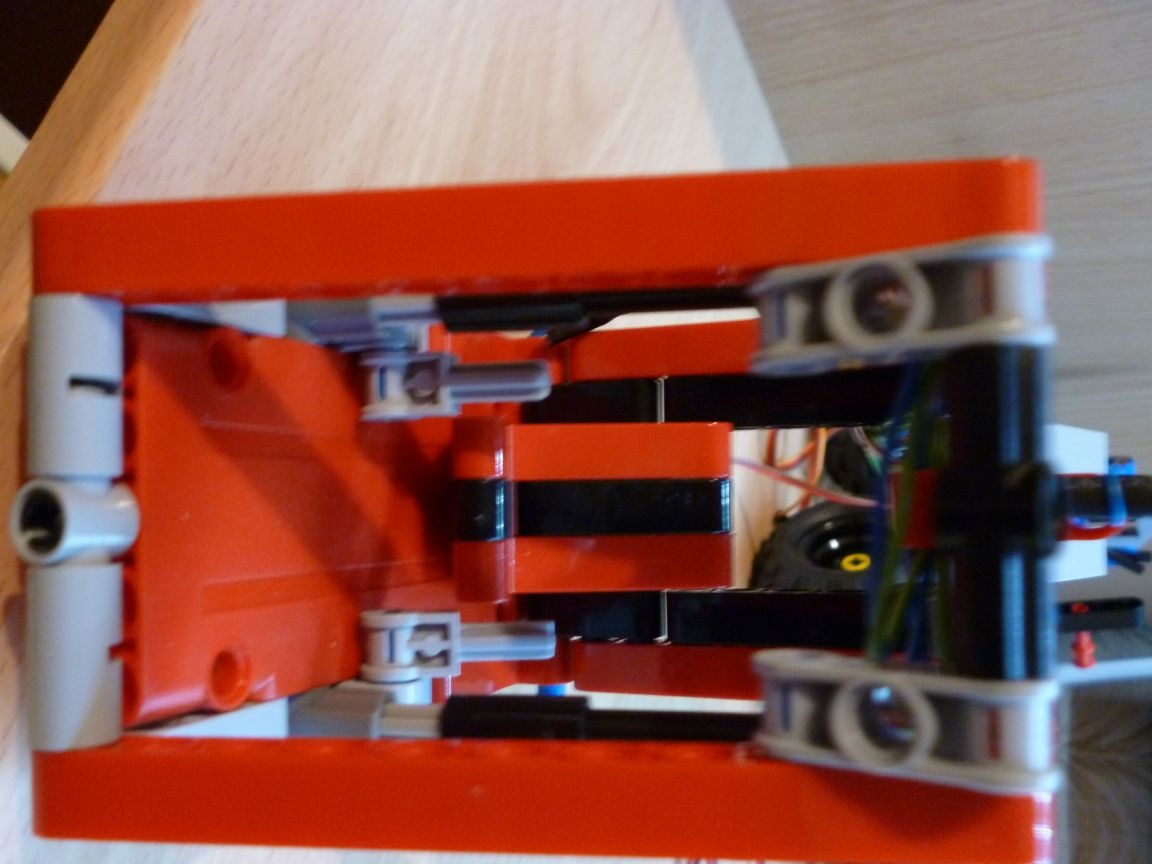
Krok 1 zmontuj podwozie i oś napędową.
W każdym razie możesz zamontować dowolne podwozie firmy Technic, jak się okazało.
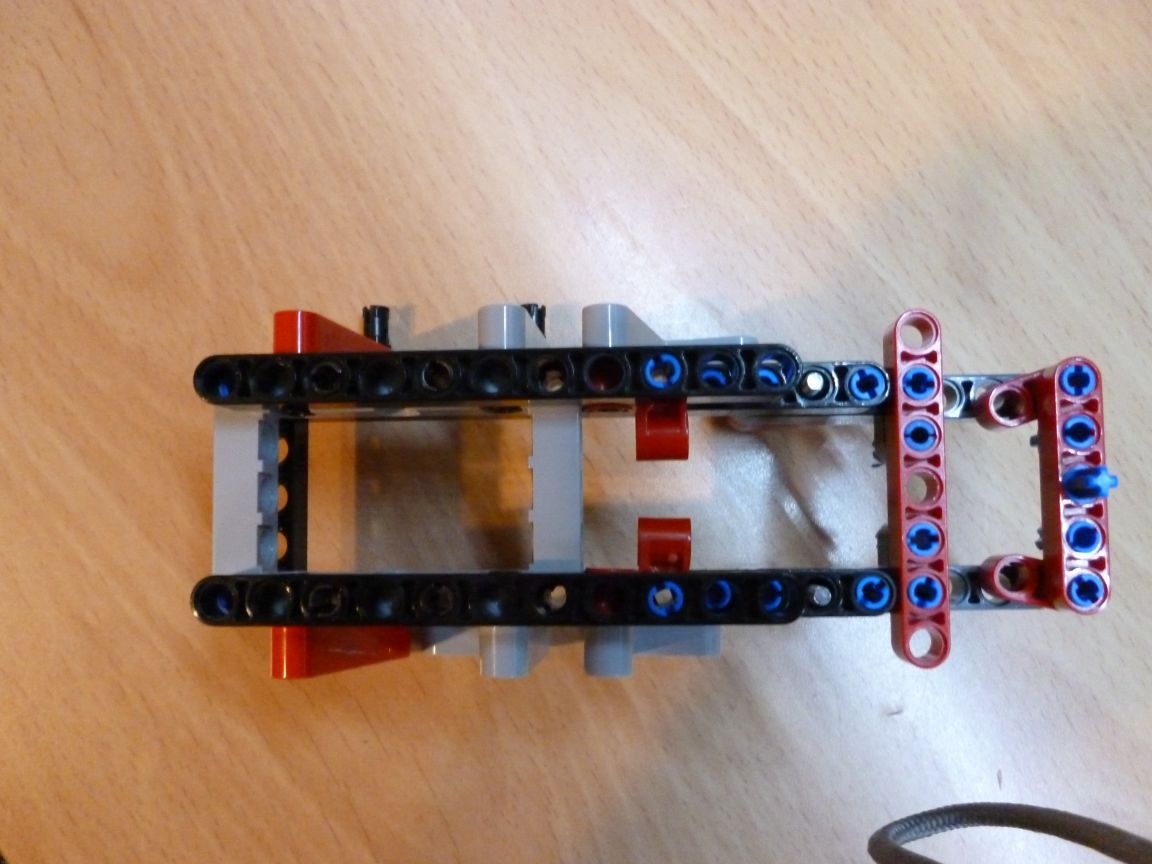
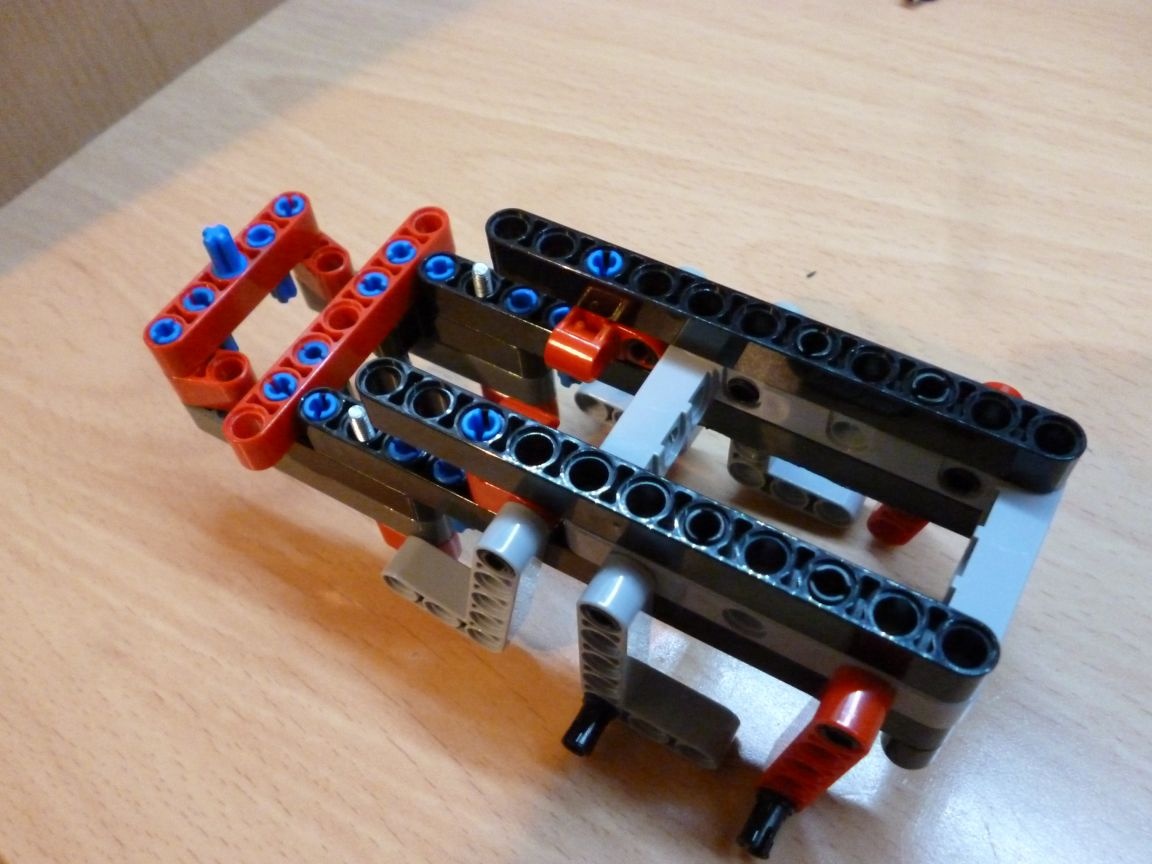
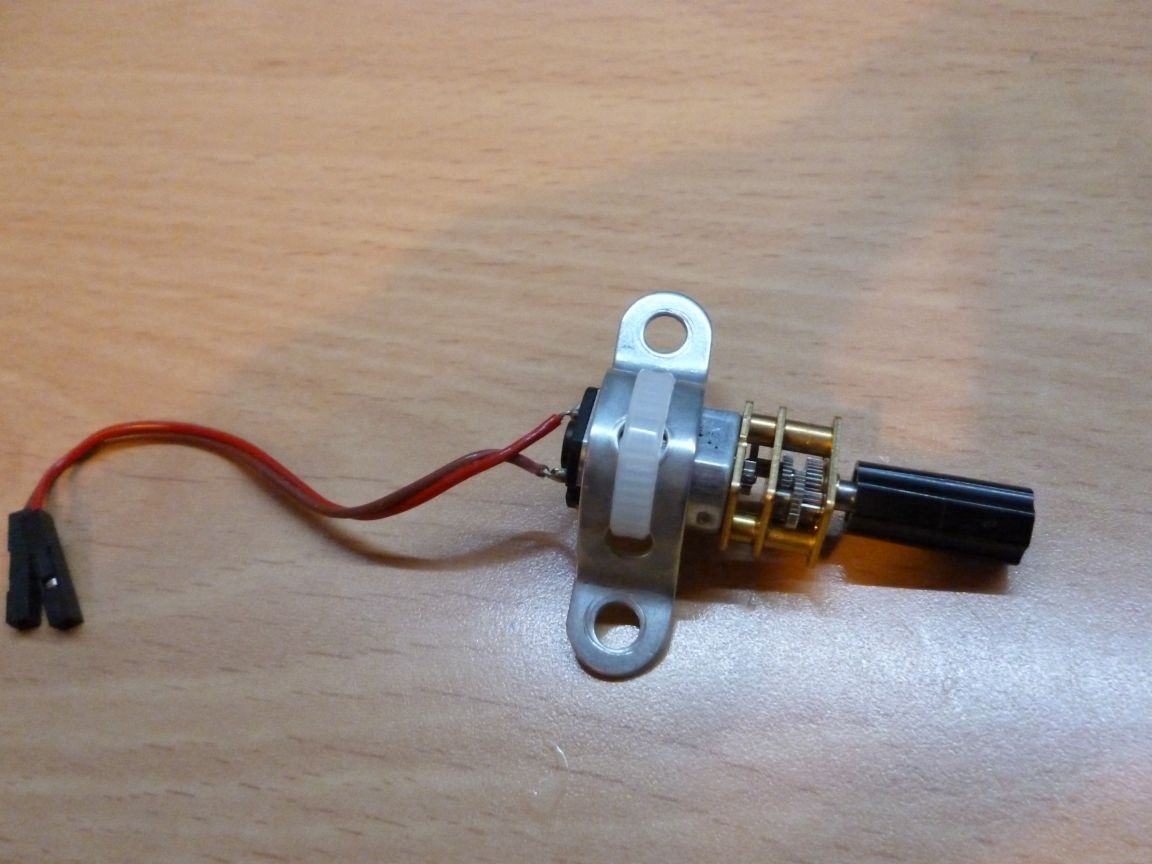
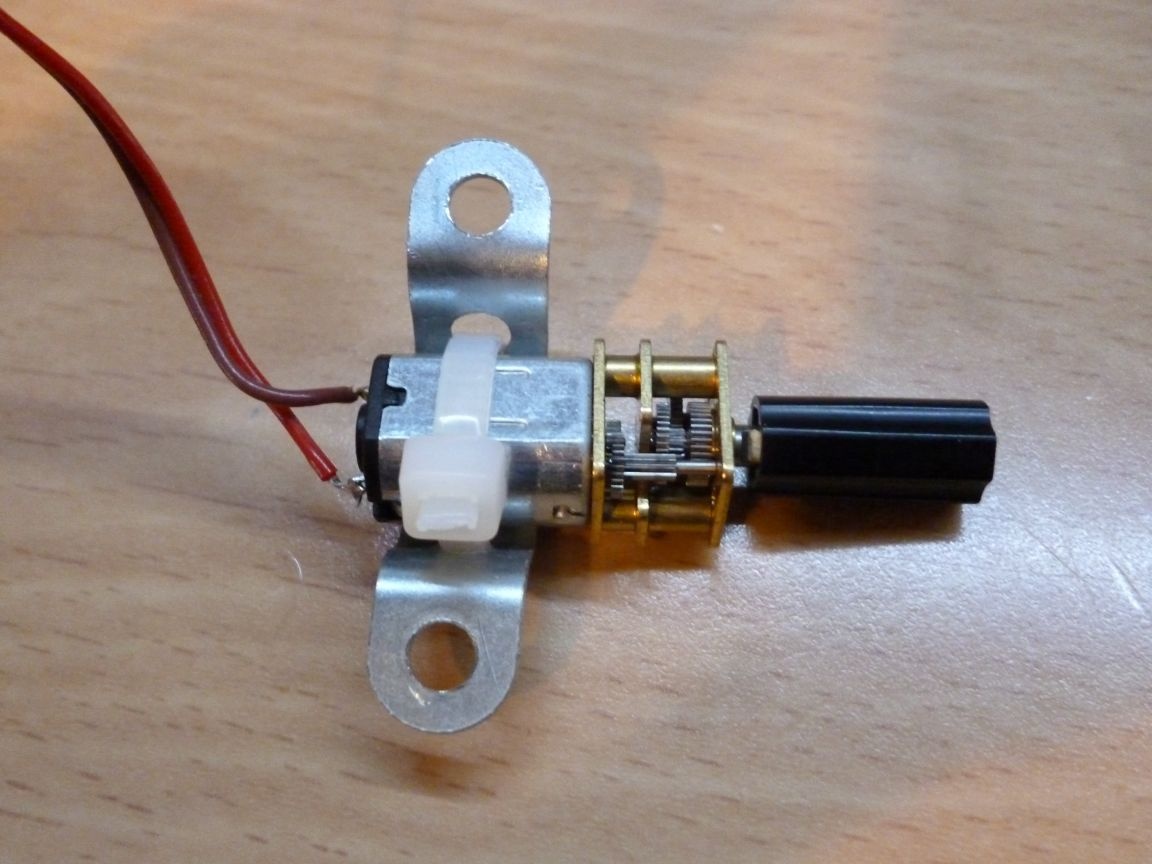
Problemem jest jedynie połączenie motoreduktora z częściami projektanta. Uznałem to w następujący sposób: załóż na oś motoreduktora tuleję łączącą i włóż skrawek zapałki do zamocowania. Do montażu motoreduktora zastosowano metalowy plastik od żelaznego projektanta i zacisk. Okazało się, że:
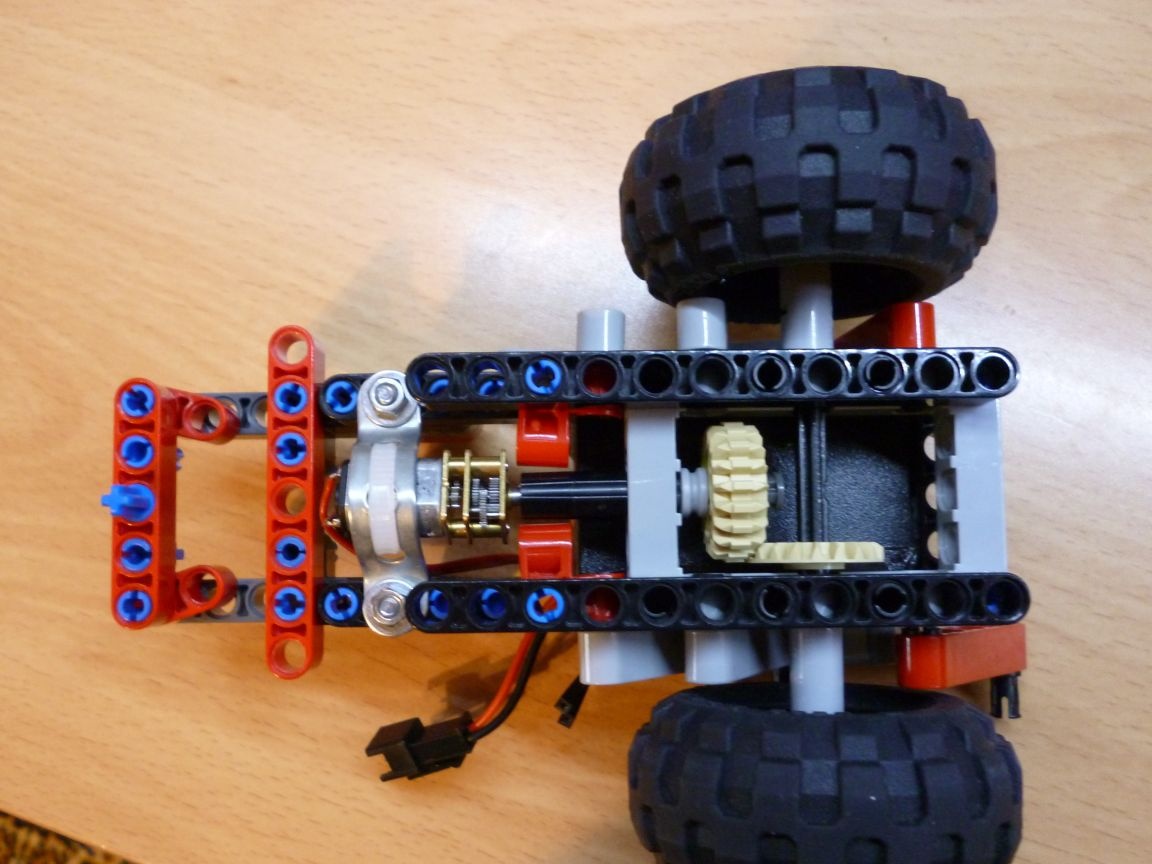
Następnie instalujemy powstały projekt na podwoziu za pomocą śrub 3x40:
I załóż koła:
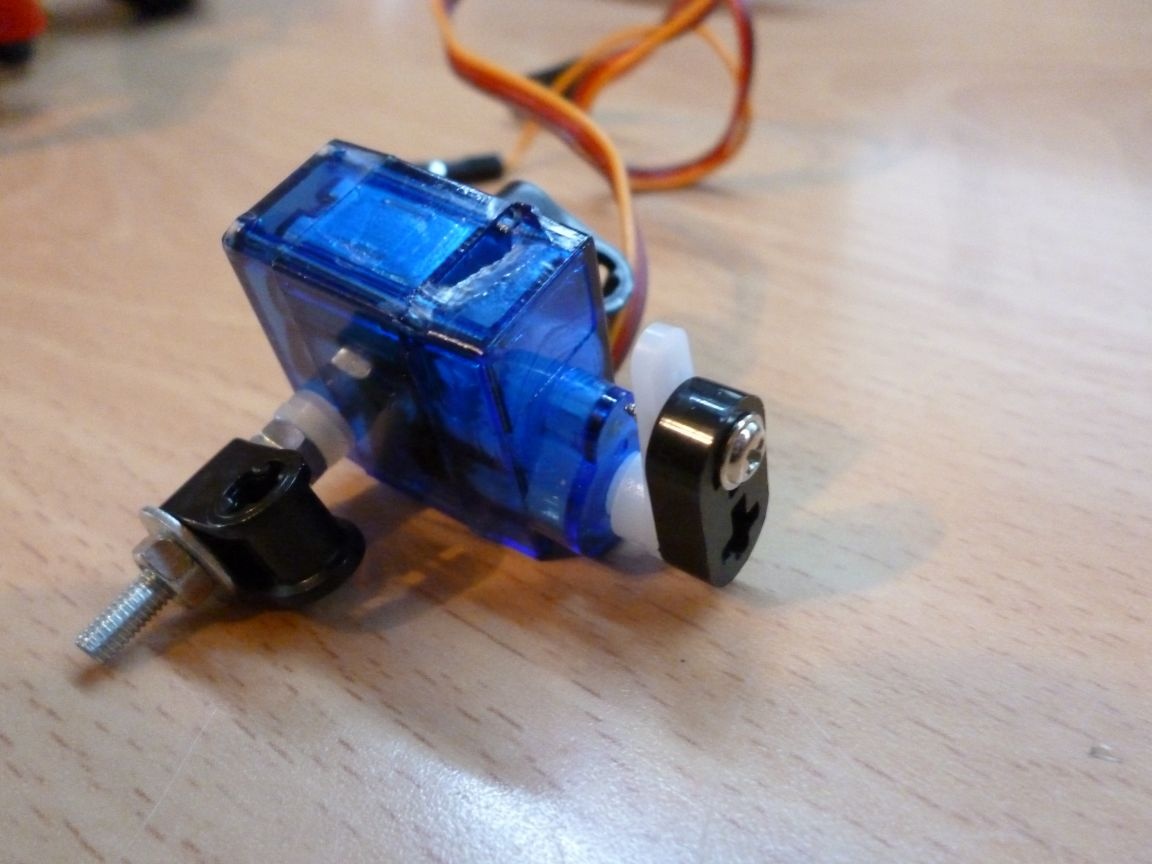
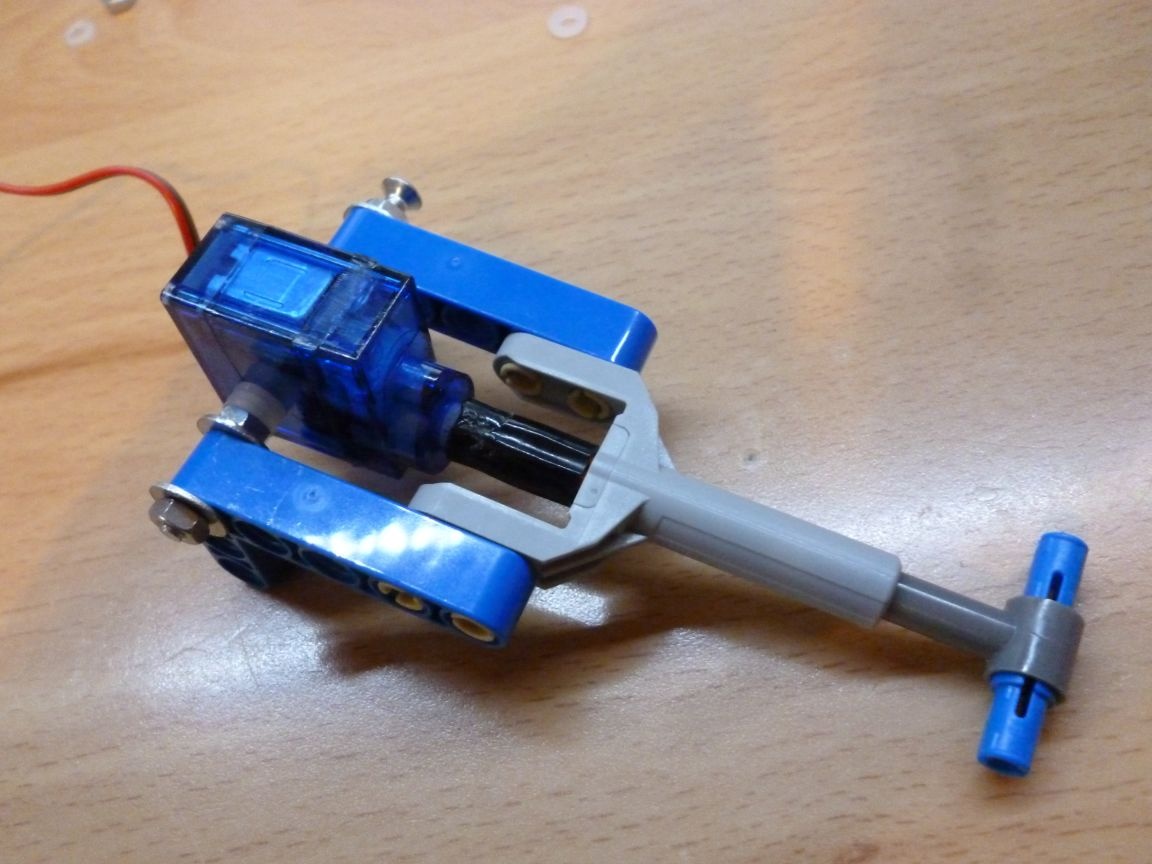
Krok 2 koła skrętne
Aby przeprowadzić obrót, wziął serwo SG-90. Konieczne jest staranne wywiercenie, aby nie dotknąć wewnętrznych części, otworu przelotowego o średnicy 3,2 mm lub po prostu wyciąć nożem biurowym.

Wkładamy śrubę do wykonanego otworu i narożniki wzdłuż krawędzi i mocujemy za pomocą nakrętek:

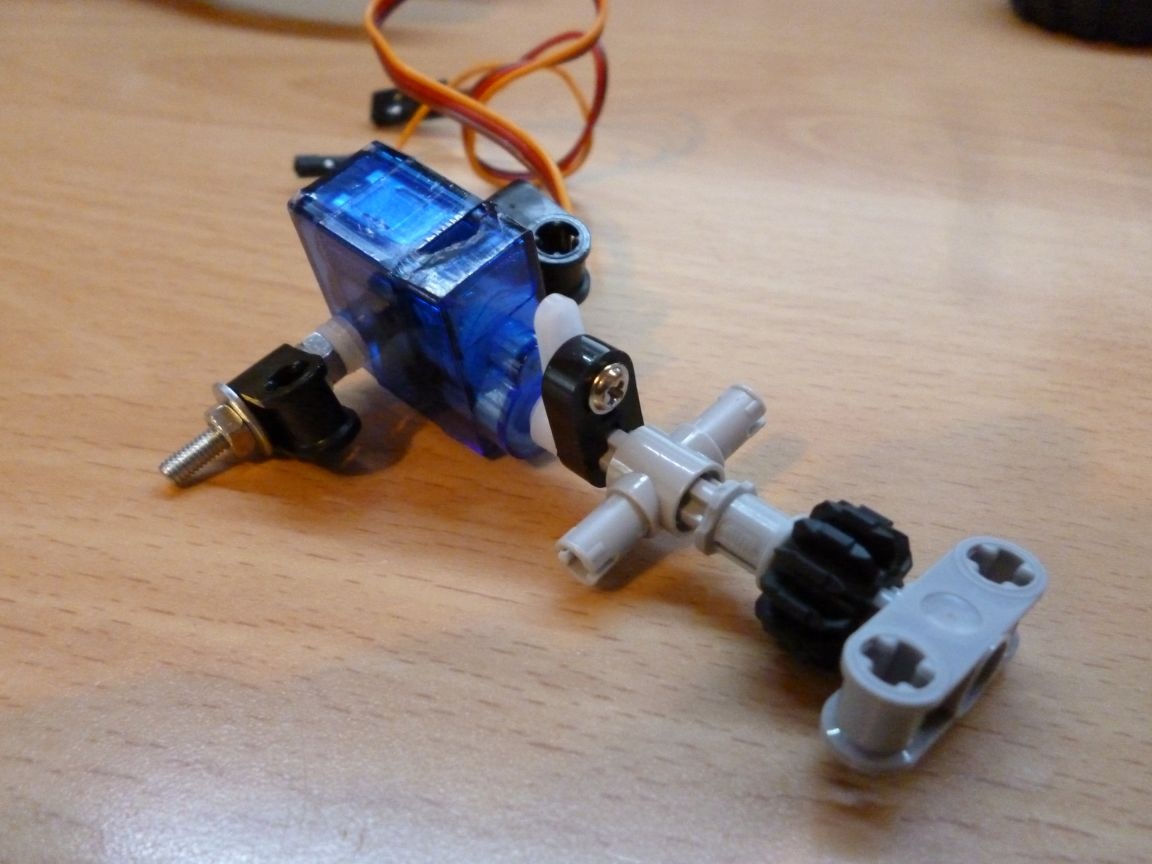
Na wale serwa nakładamy dźwignię z wkręconą częścią z klocków LEGO:
I wreszcie zestaw obrotowy:
Nakładamy na podwozie:

Załóż koła:
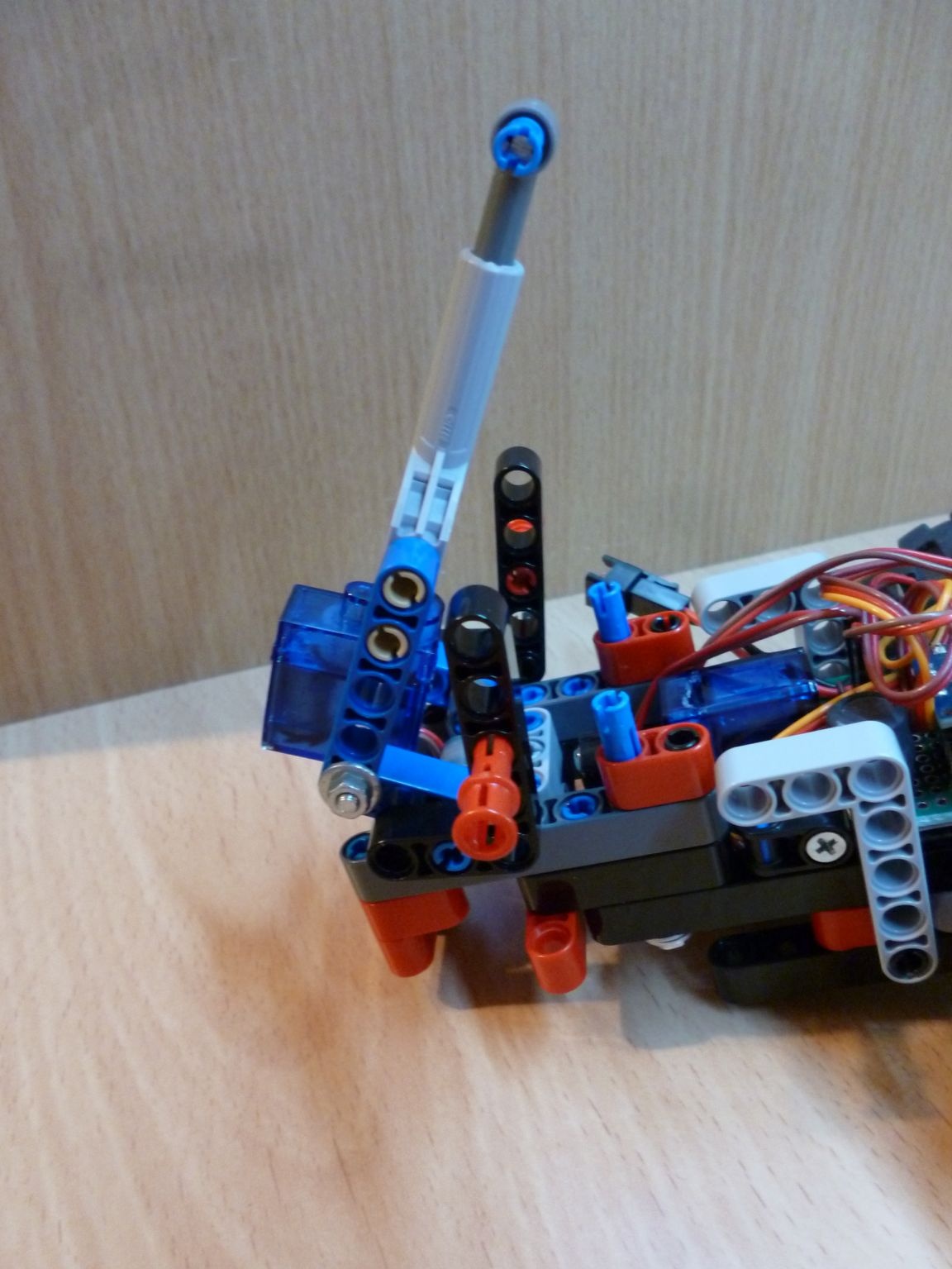
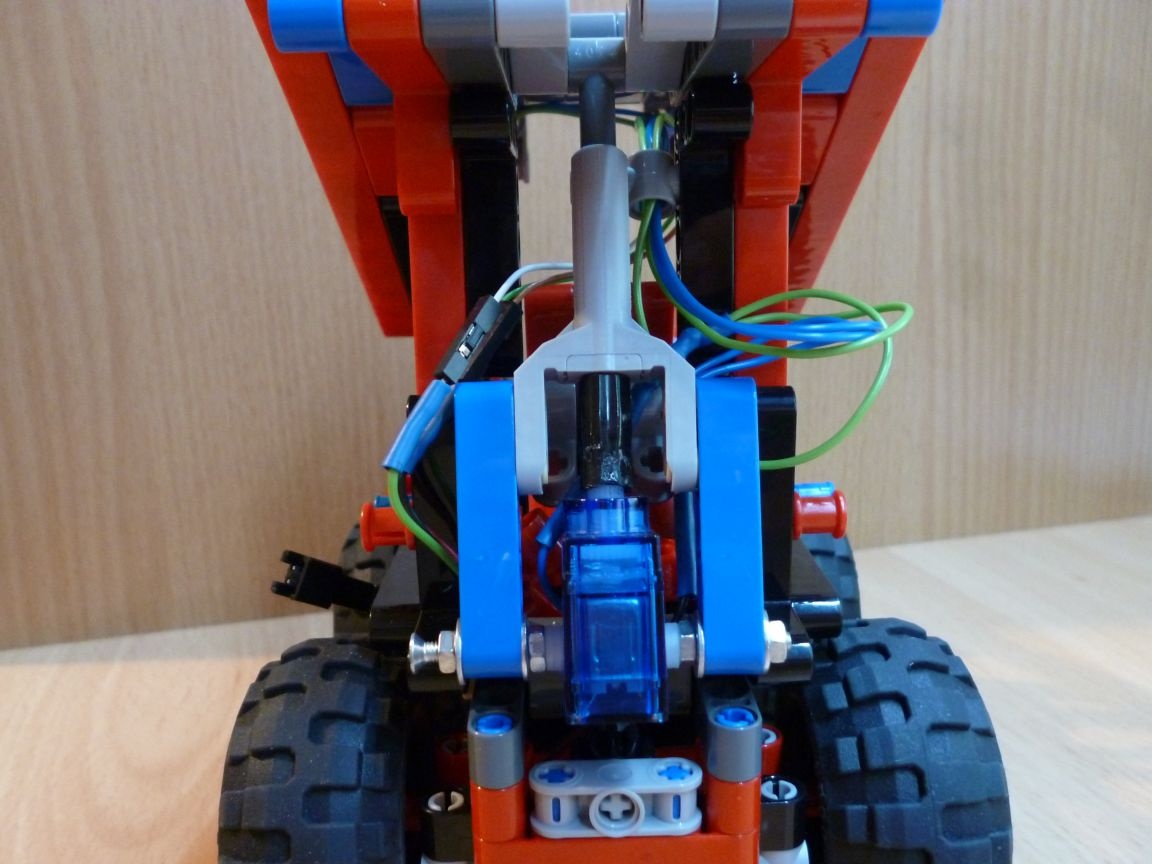
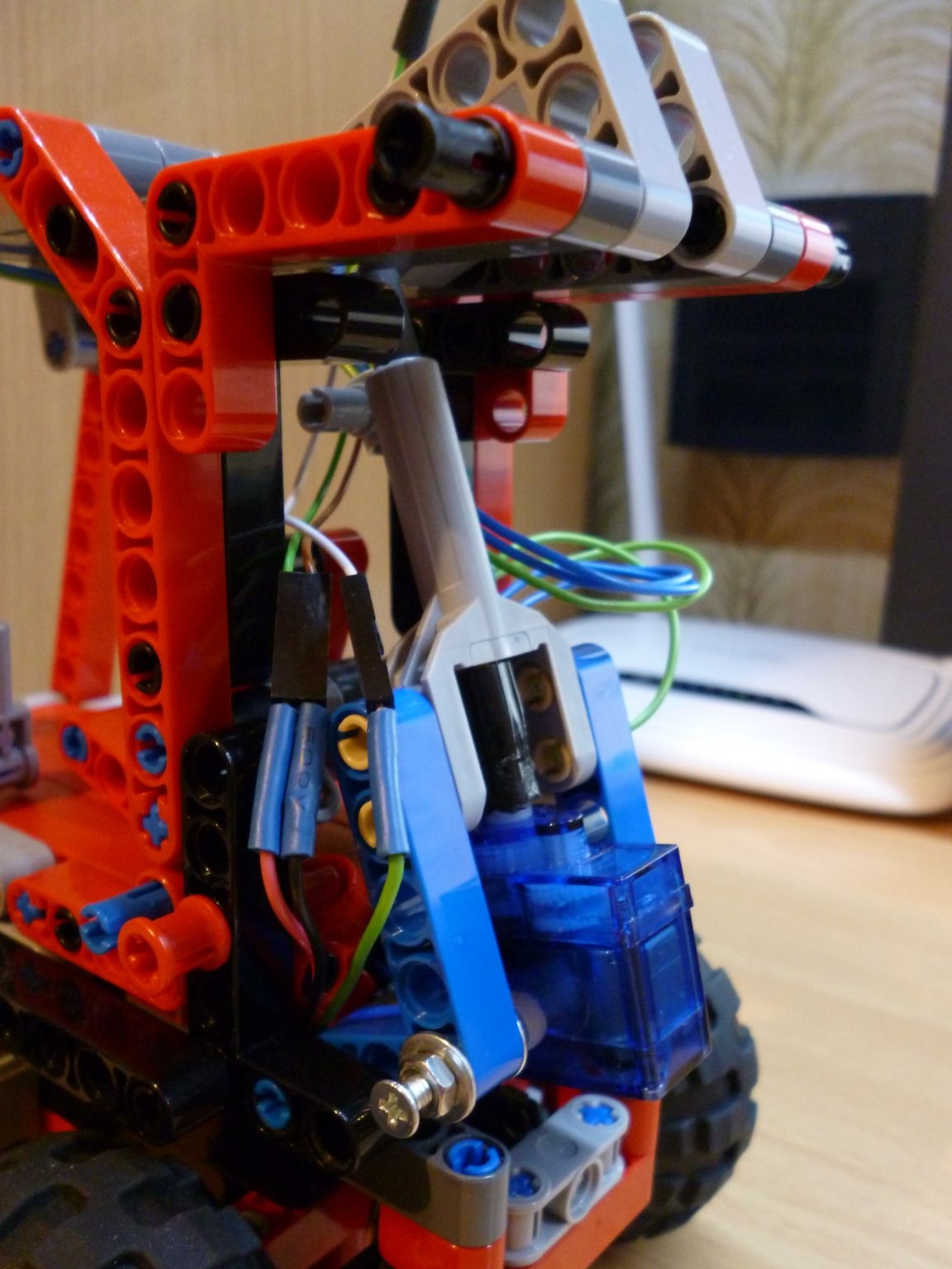
Podnośnik krok 3.
Aby podnieść wiadro, wziął zmodyfikowane serwo SG-90. Istotą jego modyfikacji jest usunięcie wewnętrznego kontrolera i przylutowanie przewodów bezpośrednio do silnika, aby silnik przekładniowy został wyjęty z serwonapędu, to znaczy, aby mógł się całkowicie obracać. Podobnie jak w pierwszym serwie, musisz wykonać otwór przelotowy do montażu:
Zainstaluj na podwoziu:
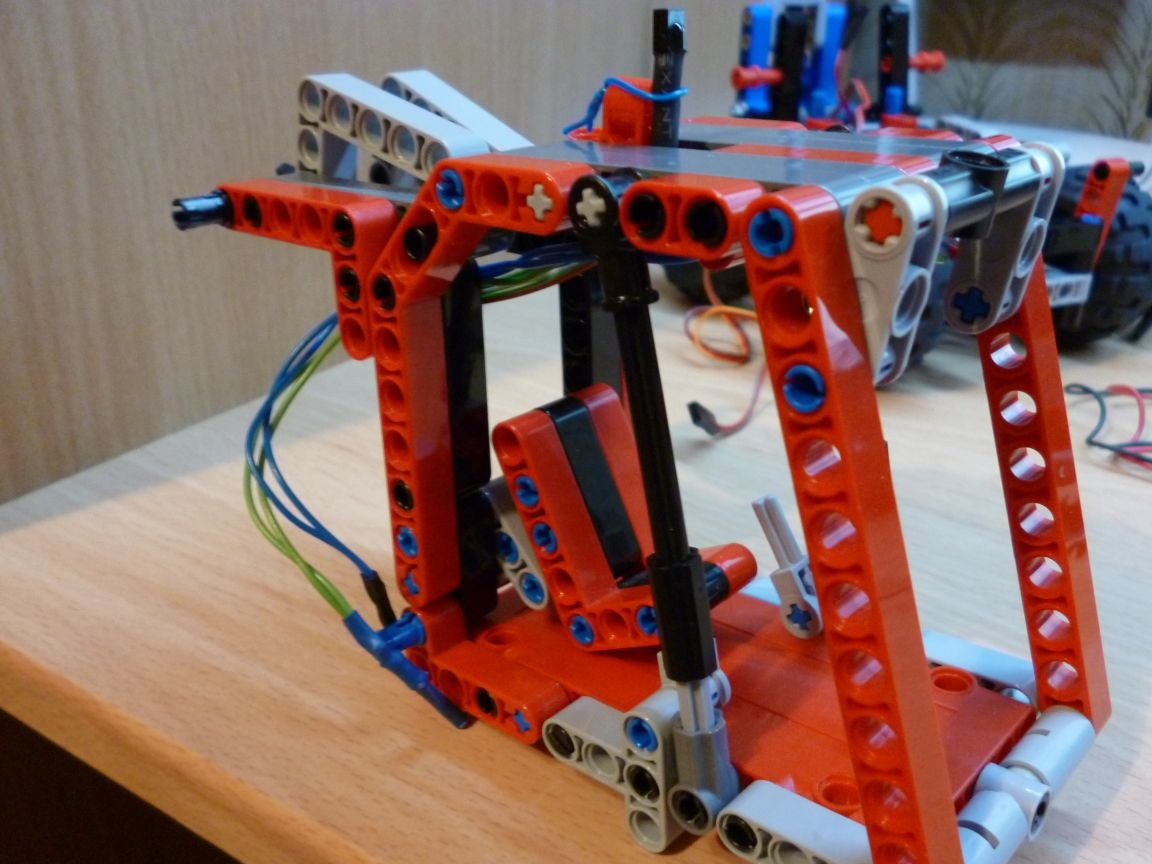
Krok 4 kabina.
Konieczne jest złożenie kabiny z klocków LEGO z fotografii:

Krok 5 jest elektrykiem.
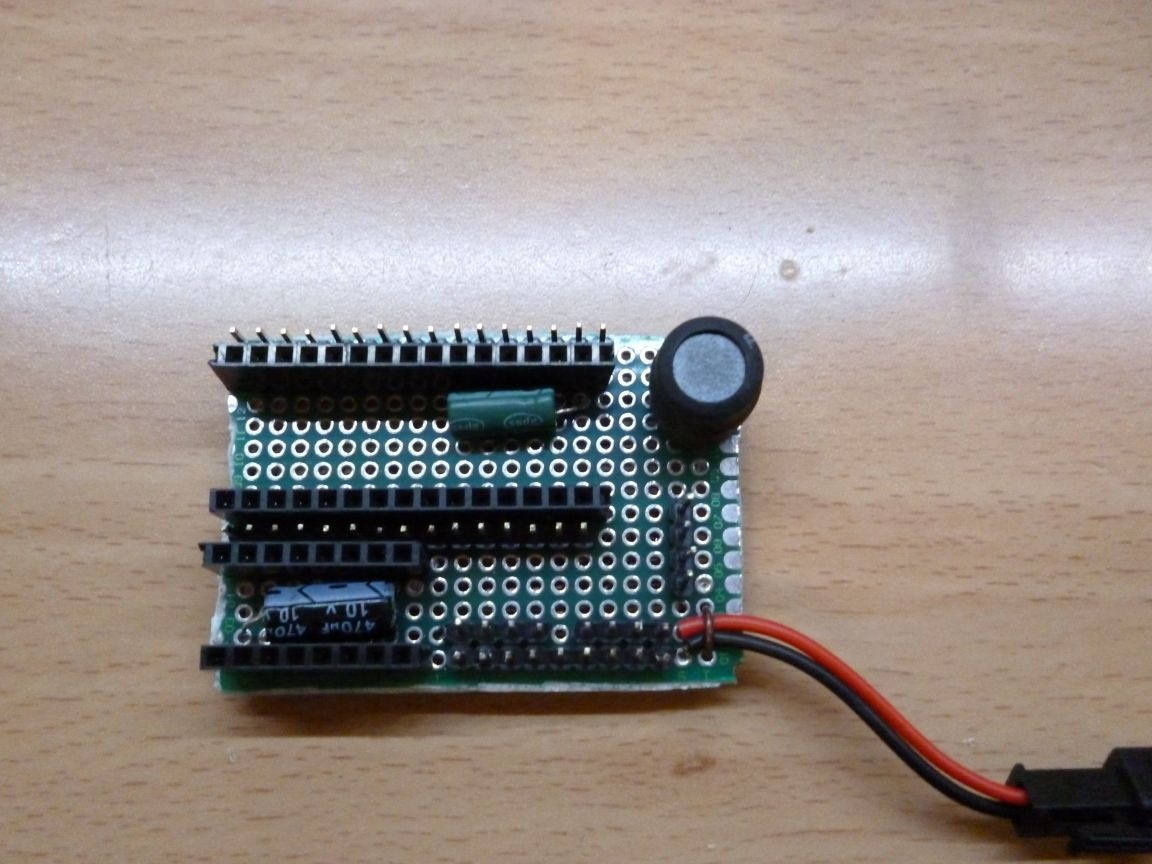
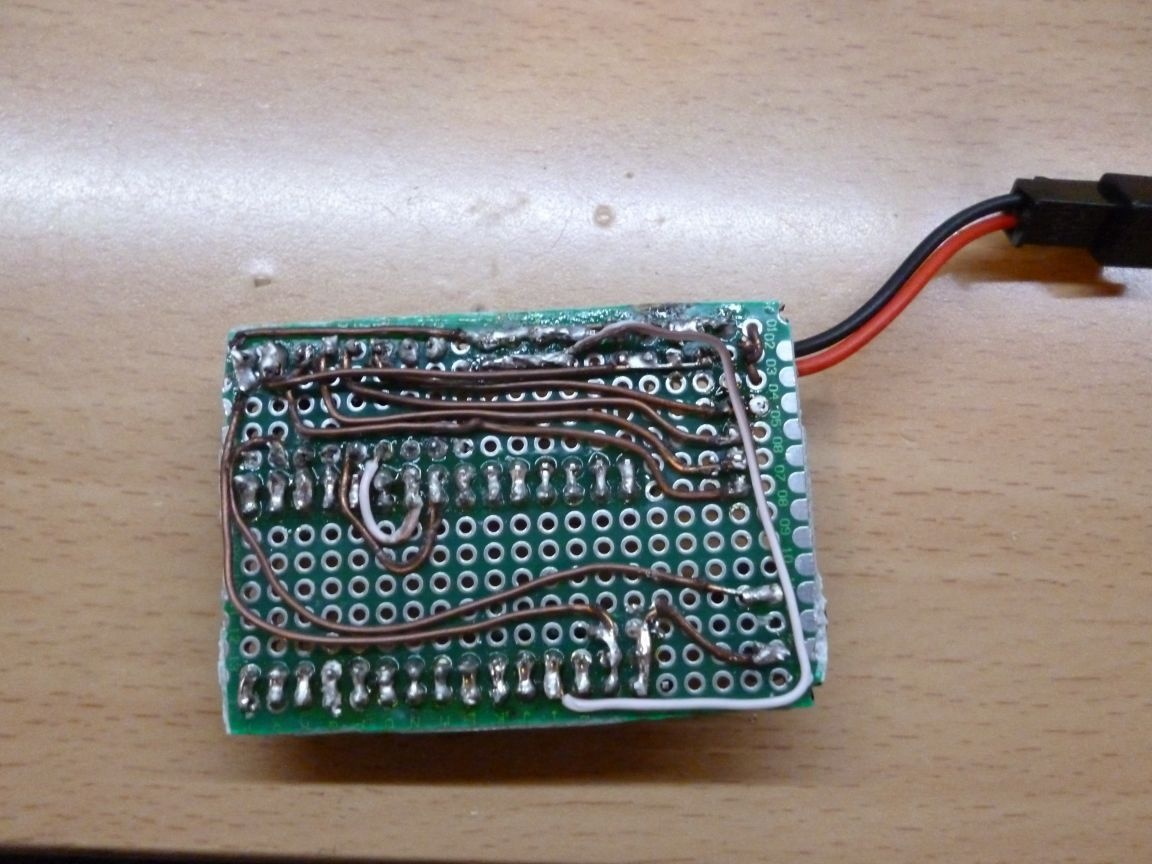
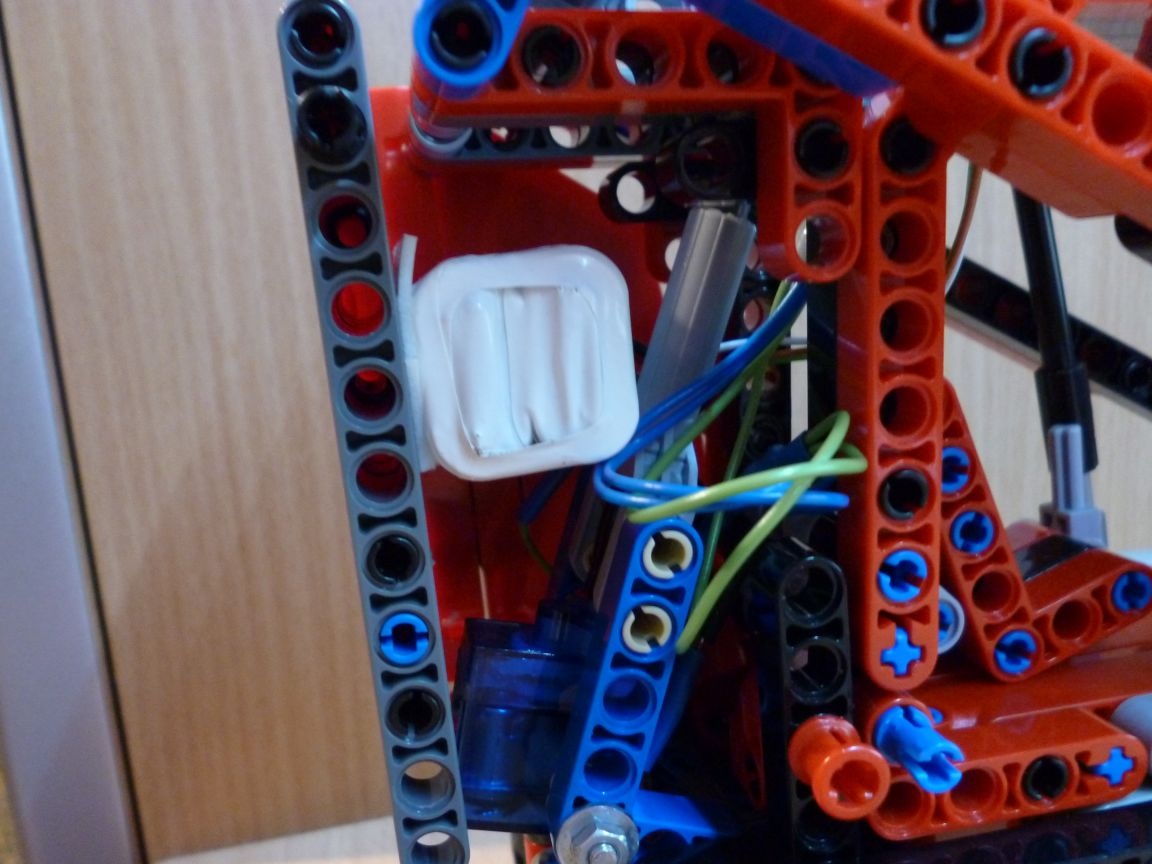
Tutaj musisz wziąć lutownicę. Dla wygody musisz lutować wszystko na płytce drukowanej zgodnie z poniższym schematem:
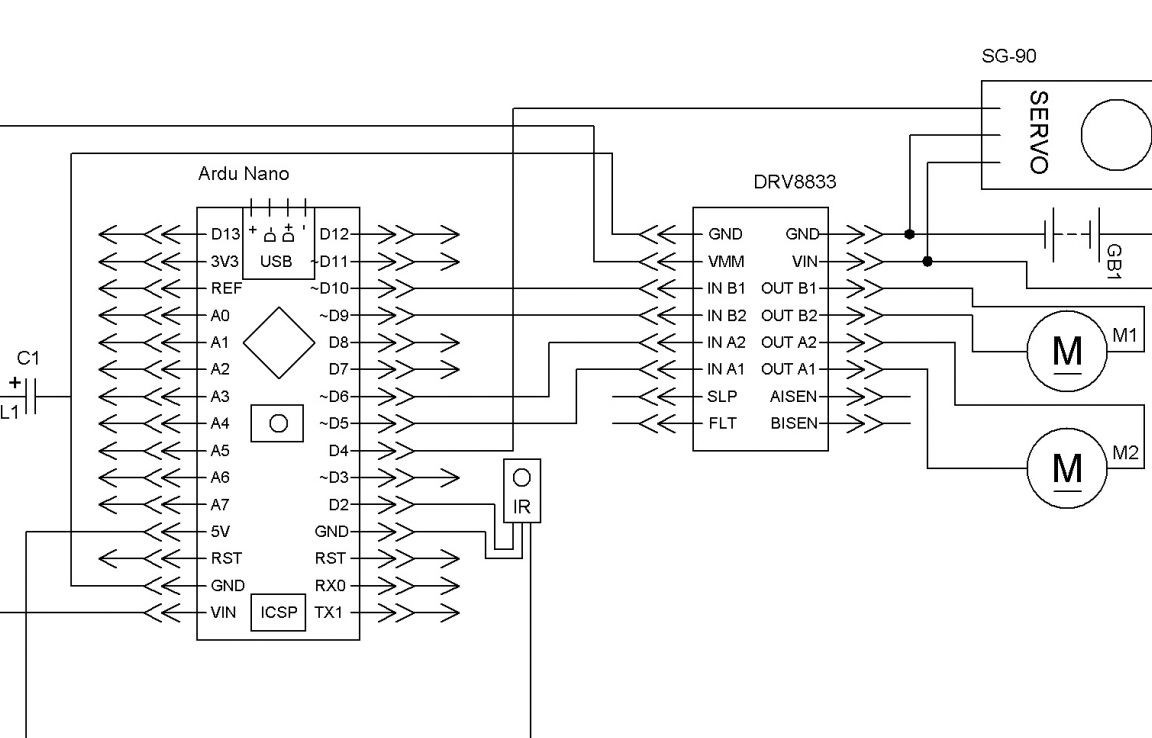
Myślę, że warto to trochę wyjaśnić: możesz wziąć dowolny kondensator małej mocy, możesz także znaleźć cewkę dowolnego rodzaju, jest to konieczne do ustabilizowania napięcia mikrokontrolera. Rezystory należy wybrać dla zastosowanych diod LED. Wziąłem odbiornik podczerwieni ze starej zabawki, ale można go kupić w sklepie radiowym. Jeśli występują silne zakłócenia, dodaj kondensator do obwodu zasilania odbiornika IR.
Mam to:
Instalujemy Arduino Nano i DRV 8833 w ich miejscach:
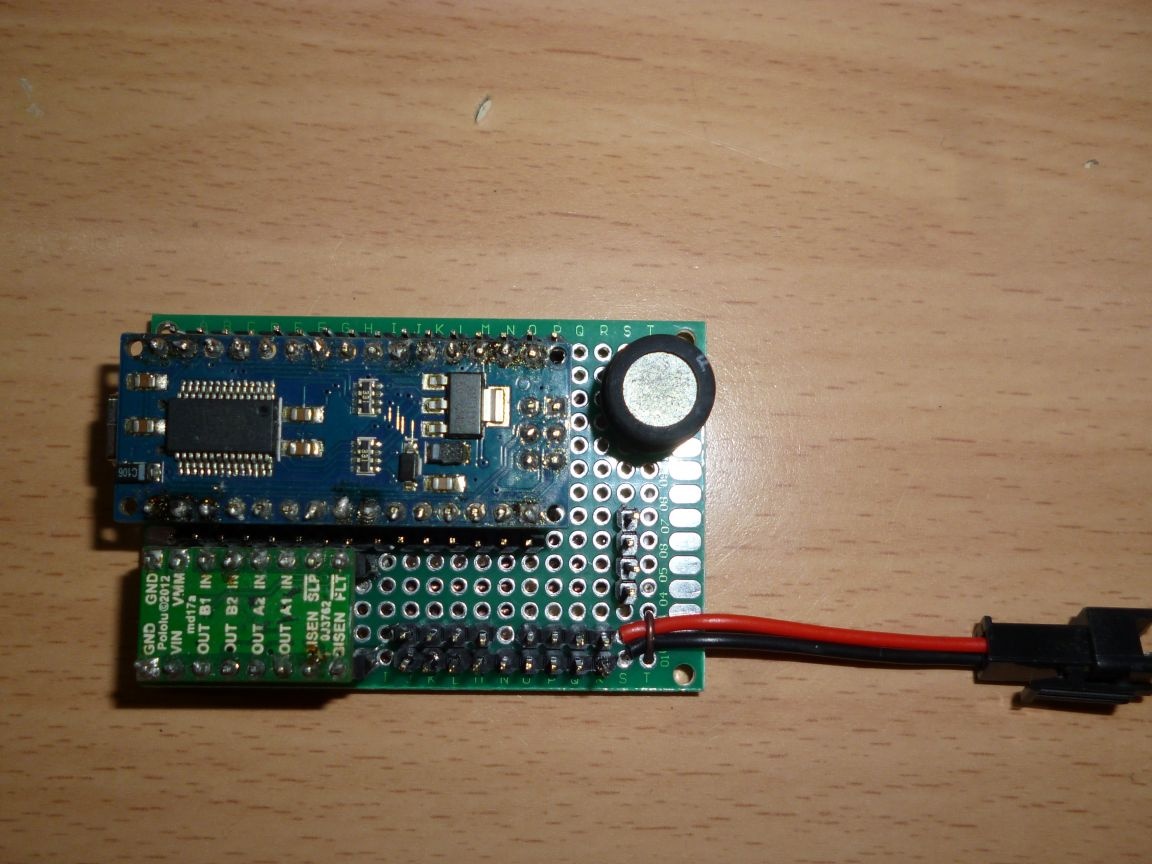
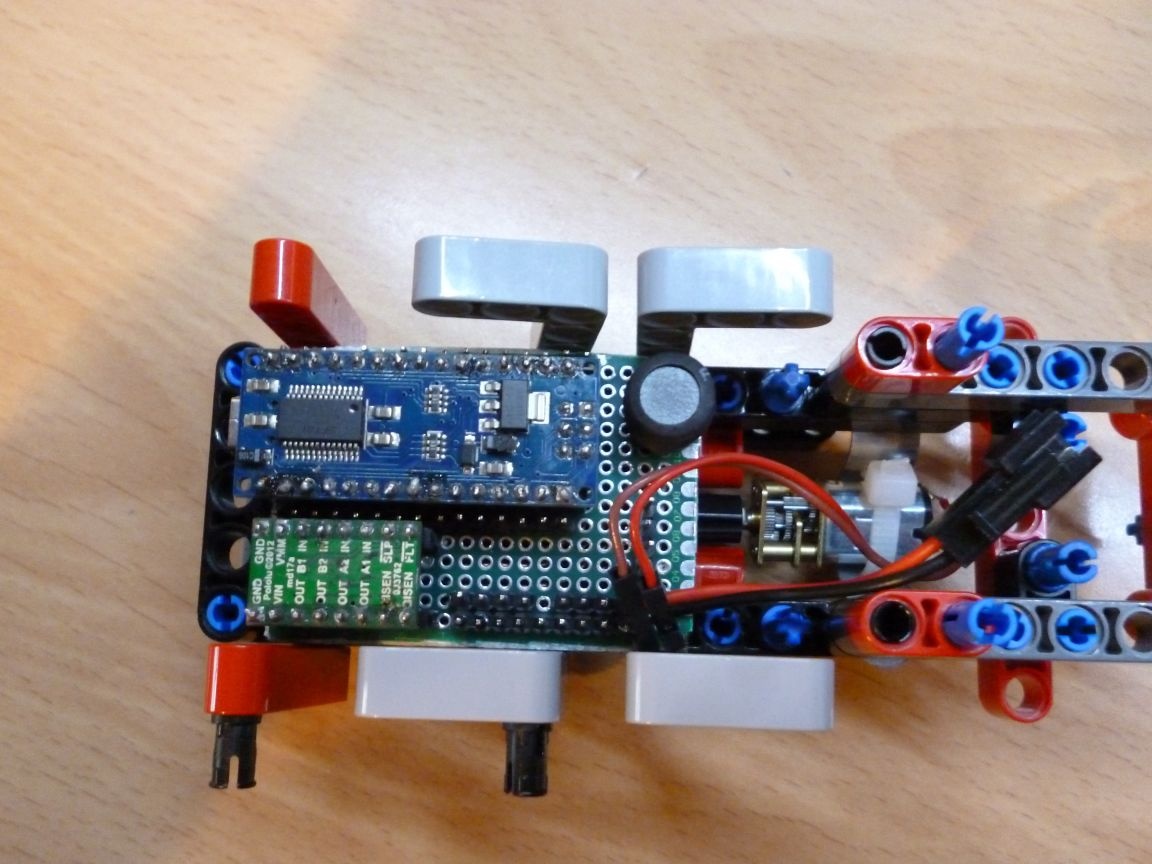
A teraz kładziemy płytę na podwoziu (dla wygody zdjęliśmy koła):
Do zasilania wykorzystałem 4 akumulatory Ni-Mn 1,2v 1000mA połączone szeregowo i uzwojone taśmą elektryczną. Przykleiłem je do dwustronnej taśmy pod pokrywą tylnej kabiny.
Krok 6 Montaż kabiny.
Podłączamy odbiornik IR, silniki i diody zgodnie ze schematem, kładziemy kabinę na podwoziu, naprawiamy łyżkę (można wykonać dowolną łyżkę):

Krok 7 oprogramowania układowego.
Programuję w Arduino IDE. Najpierw musisz uzupełnić moje oprogramowanie wewnętrzne i poprzez terminal spojrzeć na kody zdalnego sterowania, których będziesz używać. Możesz wziąć dowolny pilot na podczerwień, na przykład z telewizora lub odtwarzacza DVD. Klikając przycisk w terminalu, zobaczymy kod wciśniętego przycisku, zapisz go na kartce papieru. Robimy to za pomocą wszystkich przycisków, na których chcemy zaprogramować działania modułu ładującego. Następnie edytuj szkic. Zapisujemy kody, które zarejestrowaliśmy dla niezbędnych działań, i zapisujemy je ponownie.
Oprogramowanie układowe
Film ładujący: