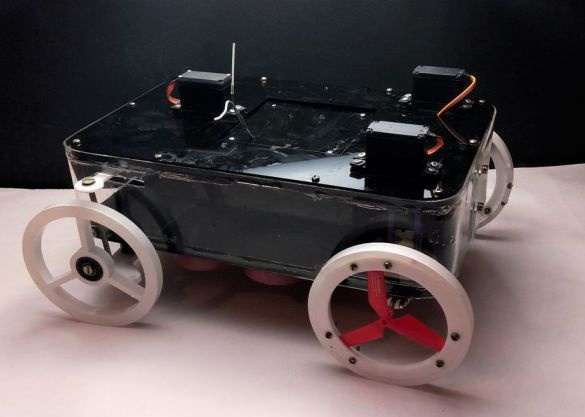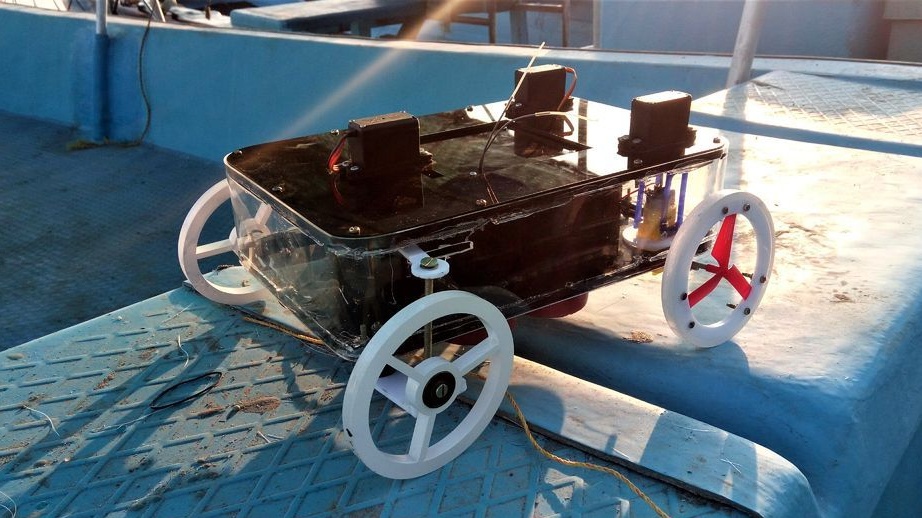



W tym artykule rozważymy produkcję przez indyjskich rzemieślników pojazdu terenowego poruszającego się zarówno na lądzie, jak i na wodzie. Pojazd terenowy składa się z pływającej platformy z kołami i śmigłem. Mechanizmy są kontrolowane za pomocą zdalnego sterowania za pośrednictwem Arduino UNO.
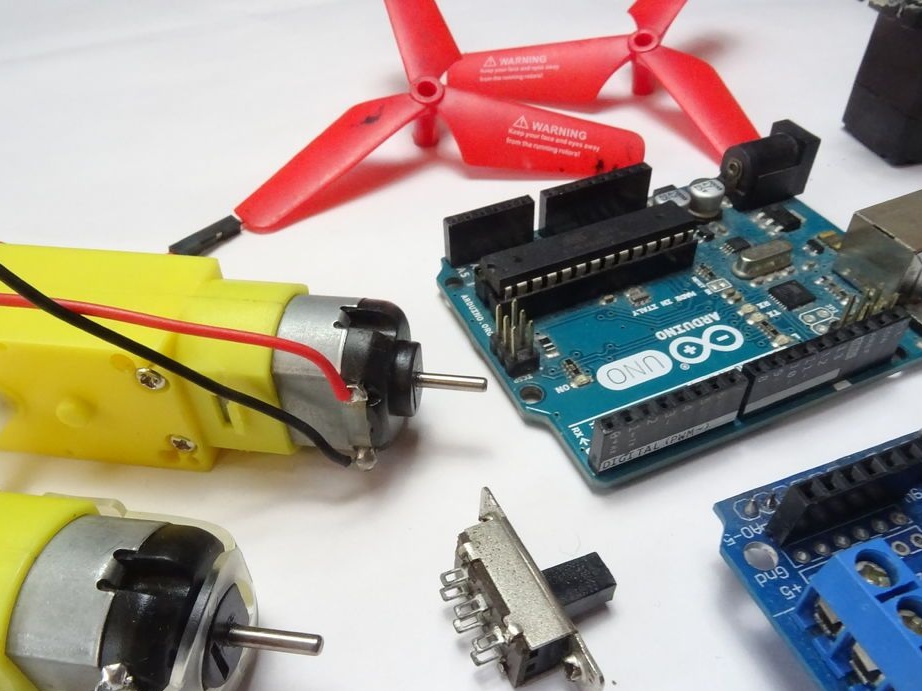
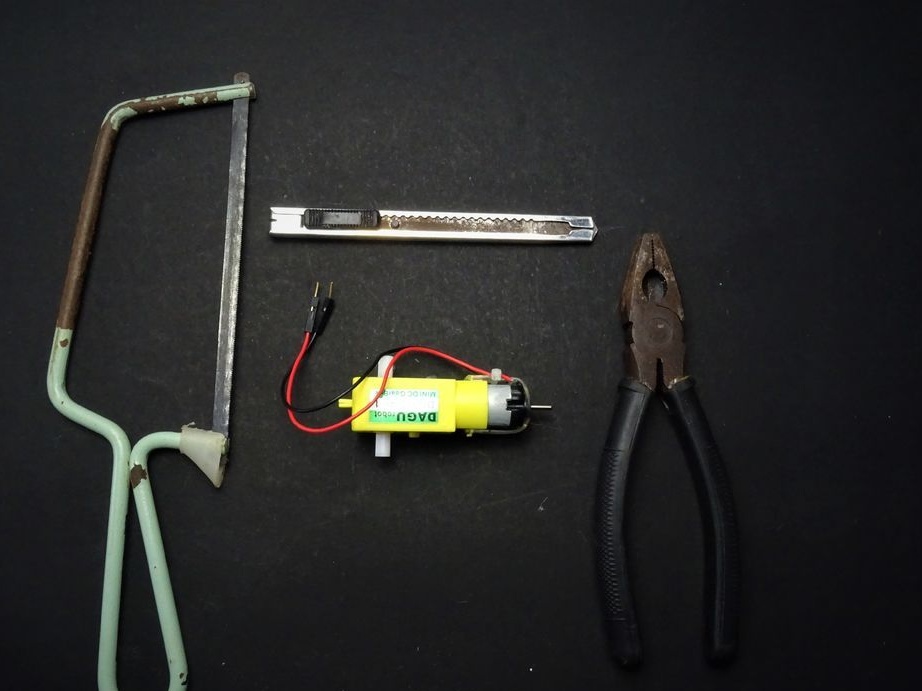
Narzędzia i materiały:
-
-AKB 9V;
-Przełącznik;
-Akryl;
-Sklejka;
(przez odniesienie łożysko ma wymiary 8 x 16 x 5 mm, autor wskazuje 8 * 22 mm)
-Dwa śmigła;
- łączniki;
-Płaszcze;
-Klej pistoletu;
-Super klej;
Żywica epoksydowa;
-Lutownica;
-Drill;
-Laser do cięcia;
-Saw;
- śrubokręt;
-Drill;
-Lutownica;
-Board;
-Komputer z oprogramowaniem;


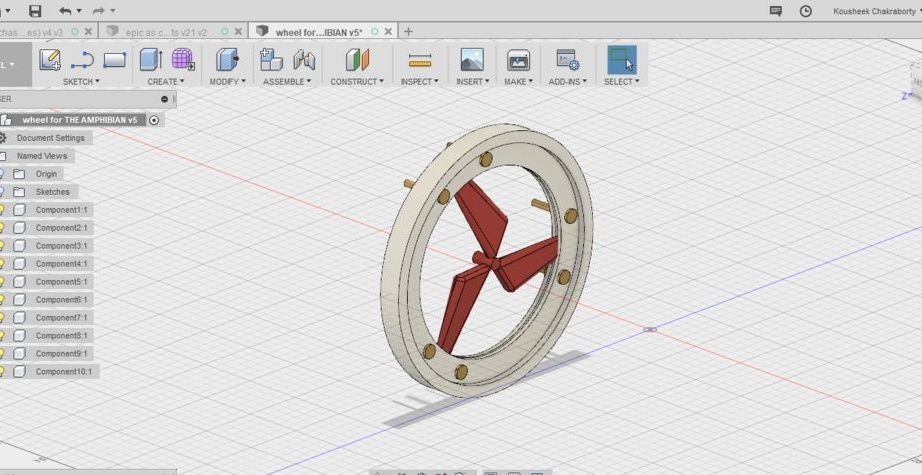
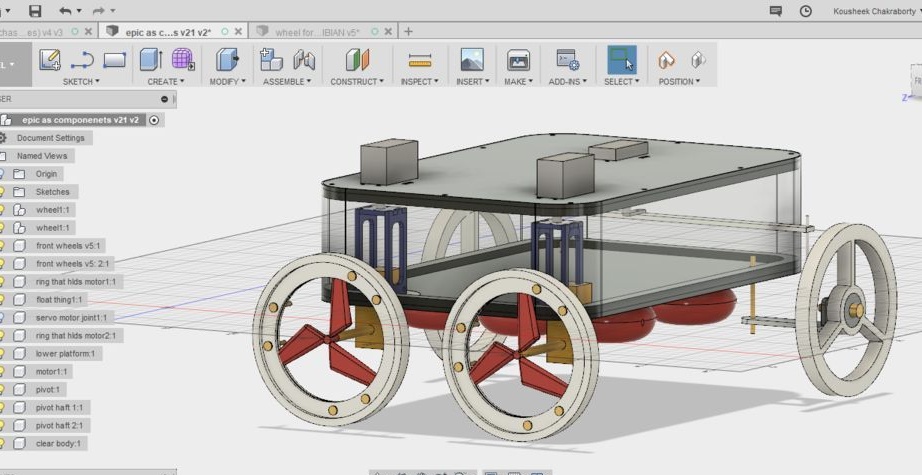
Krok pierwszy: Projektowanie
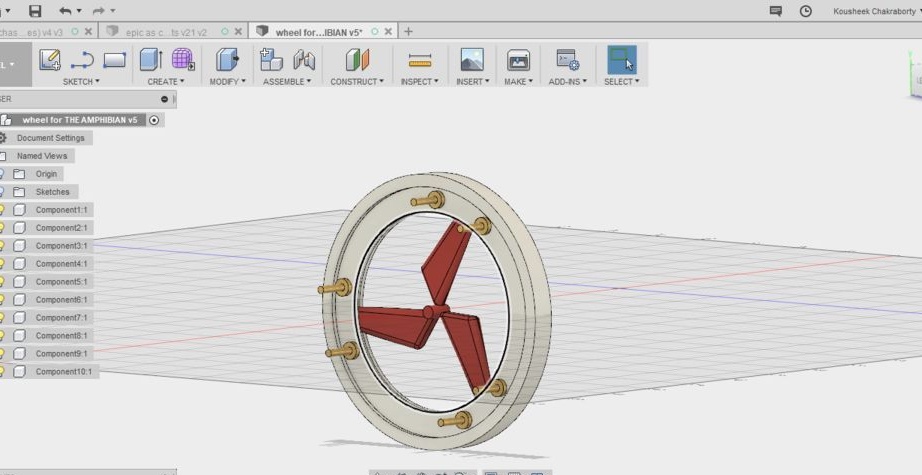
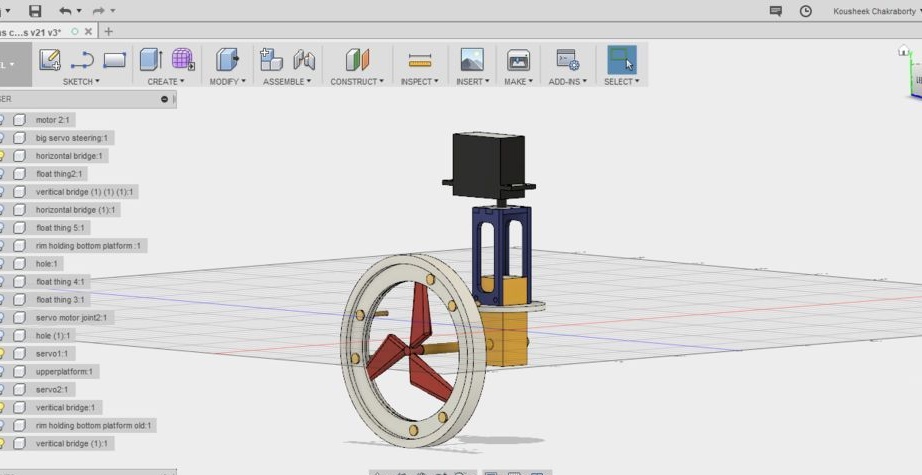
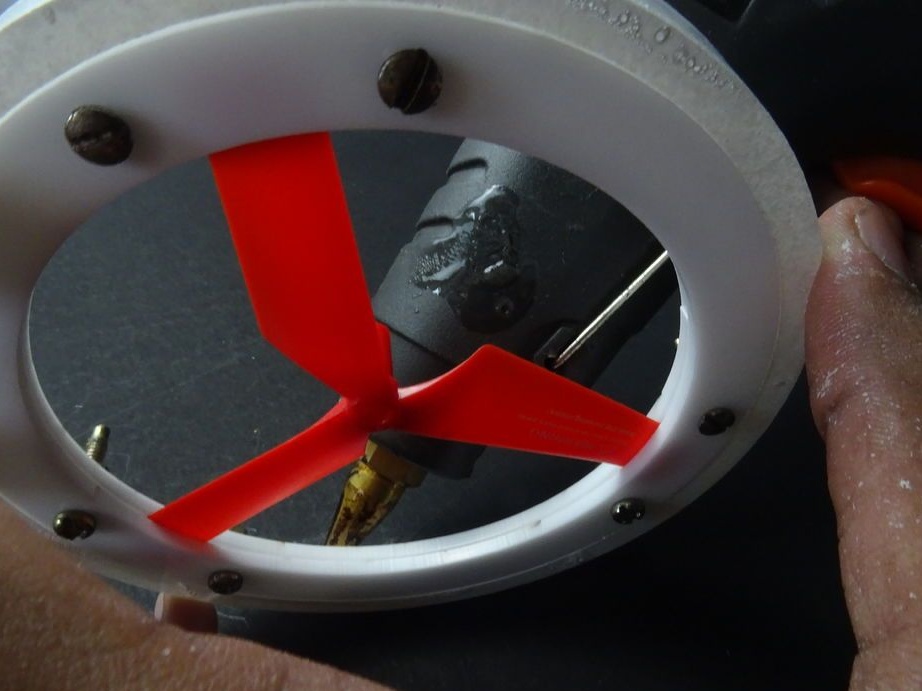
Aby stworzyć projekt, mistrzowie wykorzystali program Fusion 360. Całą trudność polegało na połączeniu ruchu na lądzie i wodzie. Projektując koła, mistrzowie opracowali system, w którym śruby otwierałyby się w wodzie, ale ze względu na złożoność projektu po prostu zintegrowali śmigła z dziecięcej zabawki wewnątrz koła. Umożliwia to kołom poruszanie się pojazdem terenowym na lądzie, a gdy wchodzą do wody, śruby są włączane.
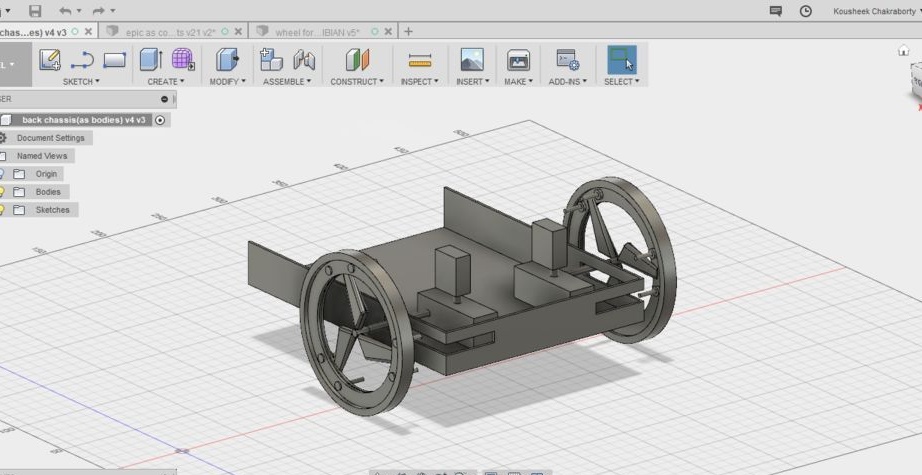
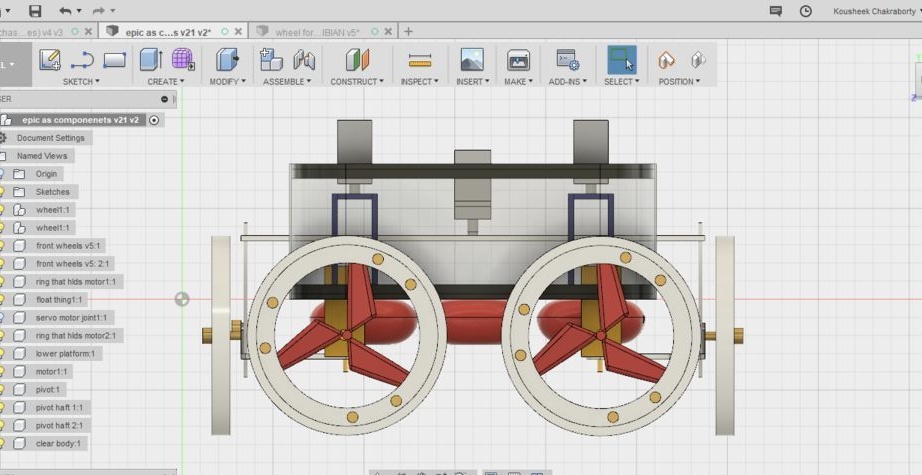
Aby zrealizować ten pomysł, podczas jazdy na wodzie musisz mieć możliwość obracania tylnych kół prostopadle do pojazdu terenowego. Stało się to możliwe po wyjęciu biegów z ramy. Plastikowe skrzynie biegów i wchodząca do nich woda nie zaszkodzą.
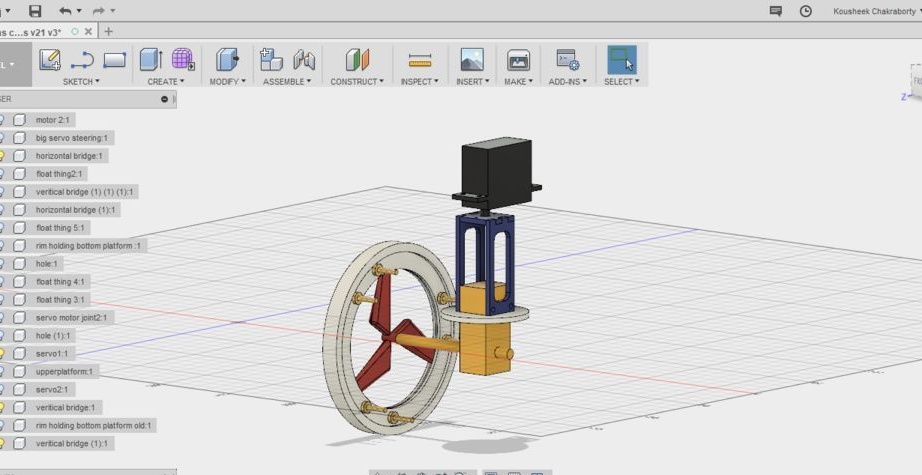
Obracanie śrub koła odbywa się za pomocą serwonapędu.
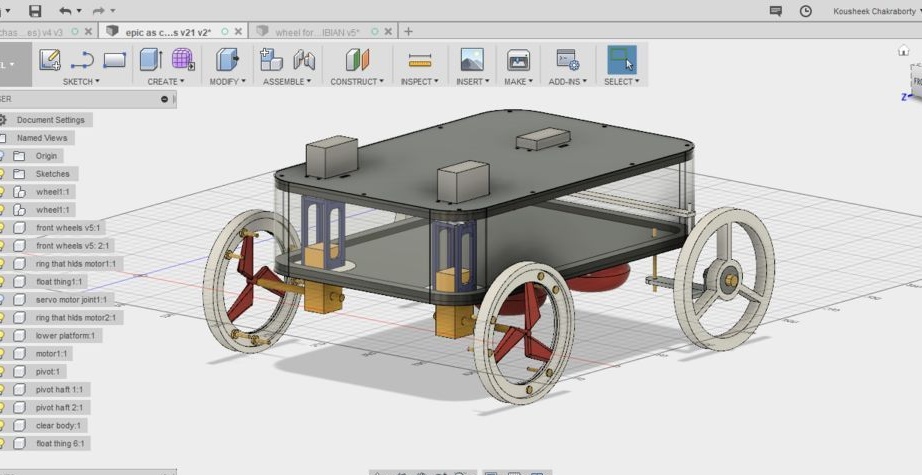
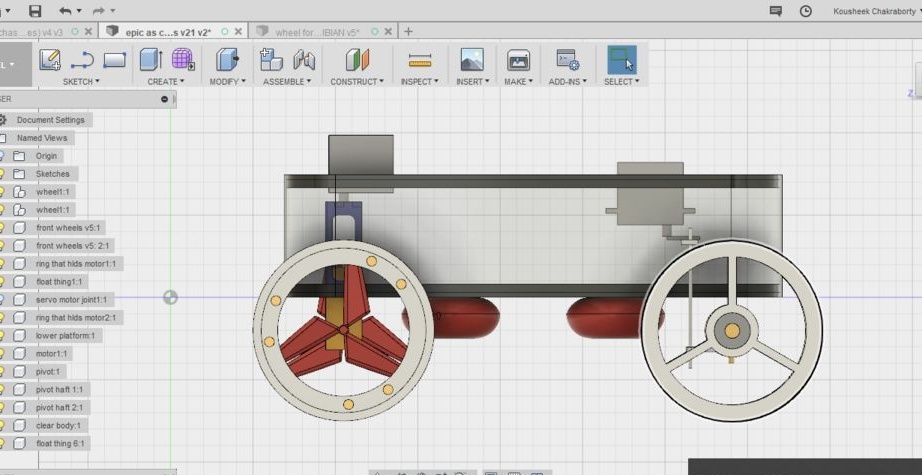
Pojazd terenowy ma dwa mechanizmy zwrotne. Jedno do sterowania tylnymi kołami śmigieł w wodzie, a drugie do jazdy na lądzie, kontroluje przednie koła. Kąt obrotu przednich kół wynosi 35 stopni, co pozwala na wykonywanie ostrych skrętów.
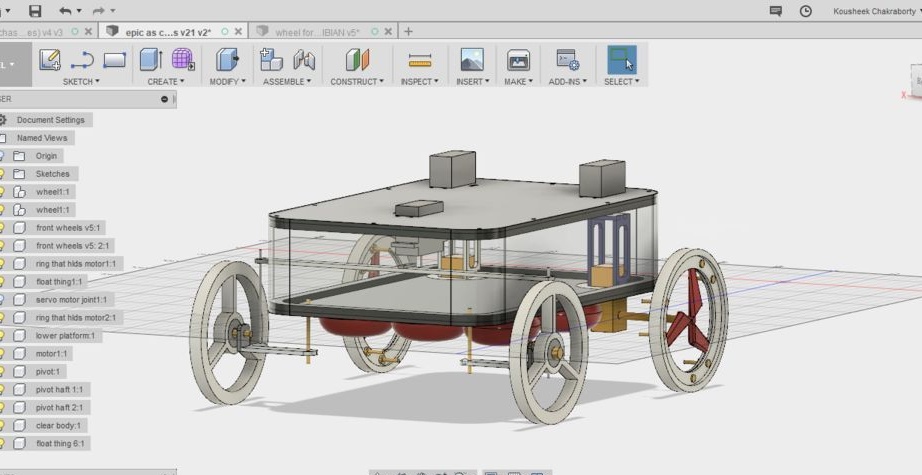
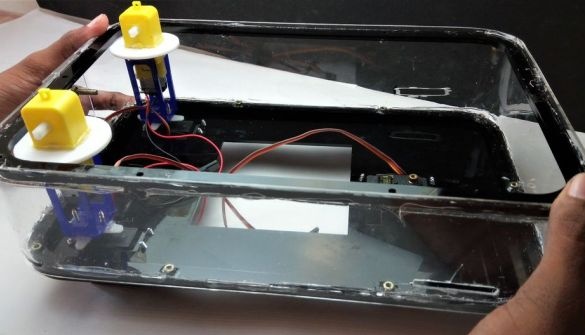
Na poniższych zdjęciach widać transformację pojazdu terenowego podczas poruszania się po lądzie i wodzie.
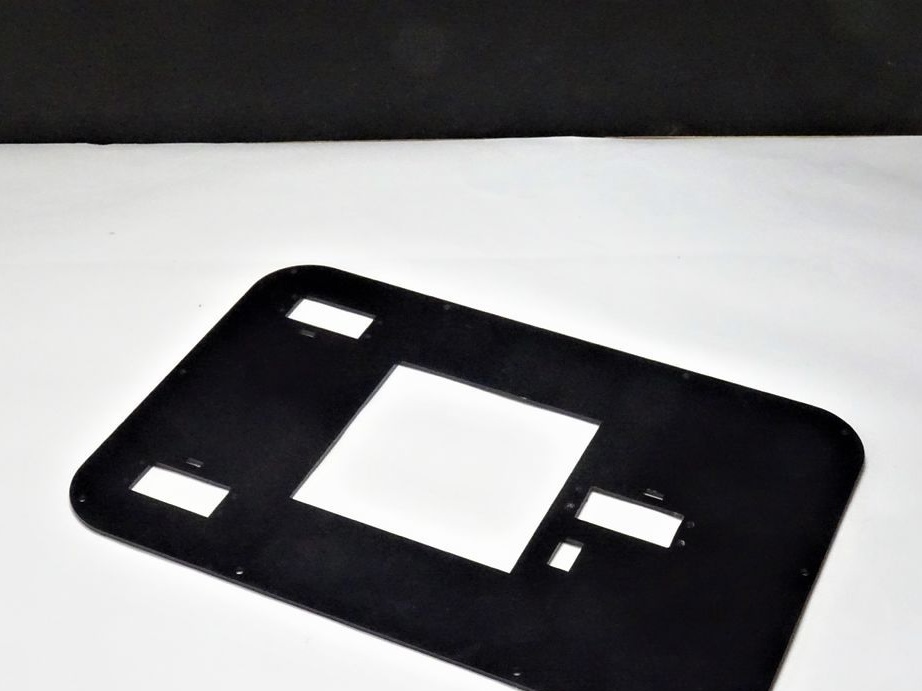
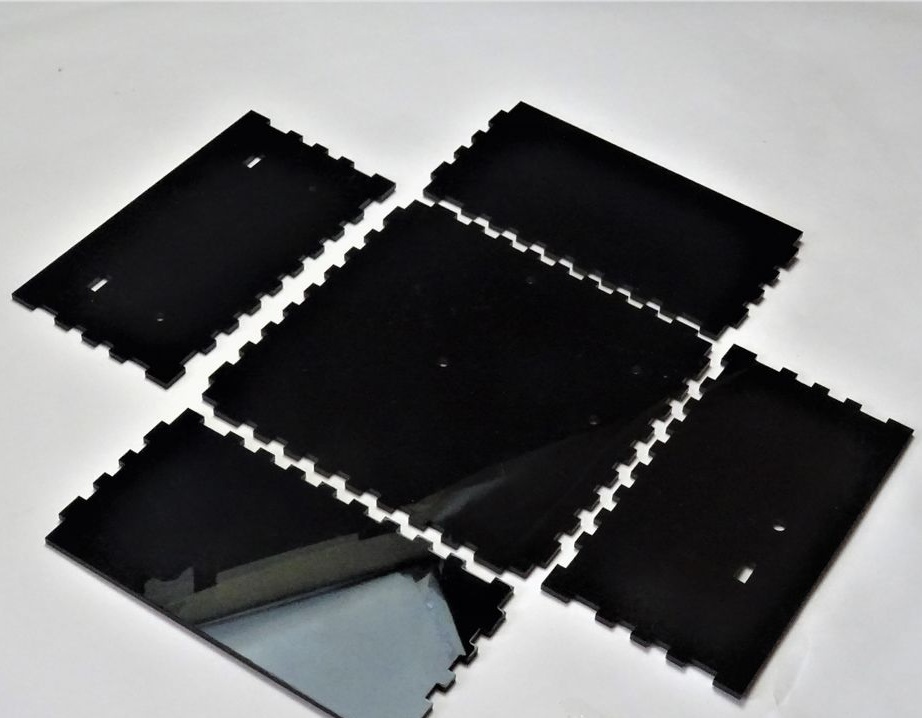
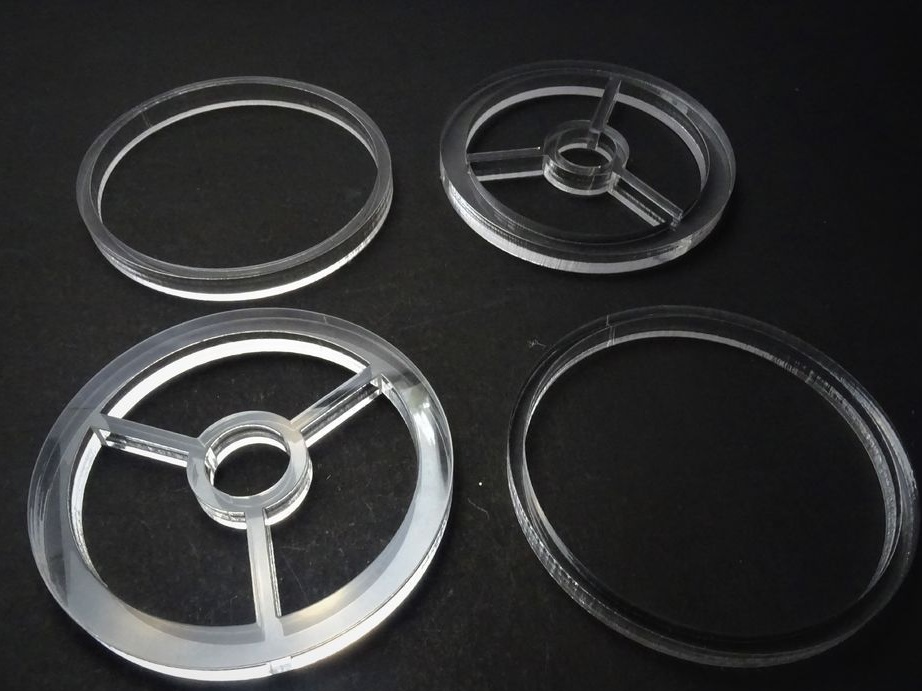
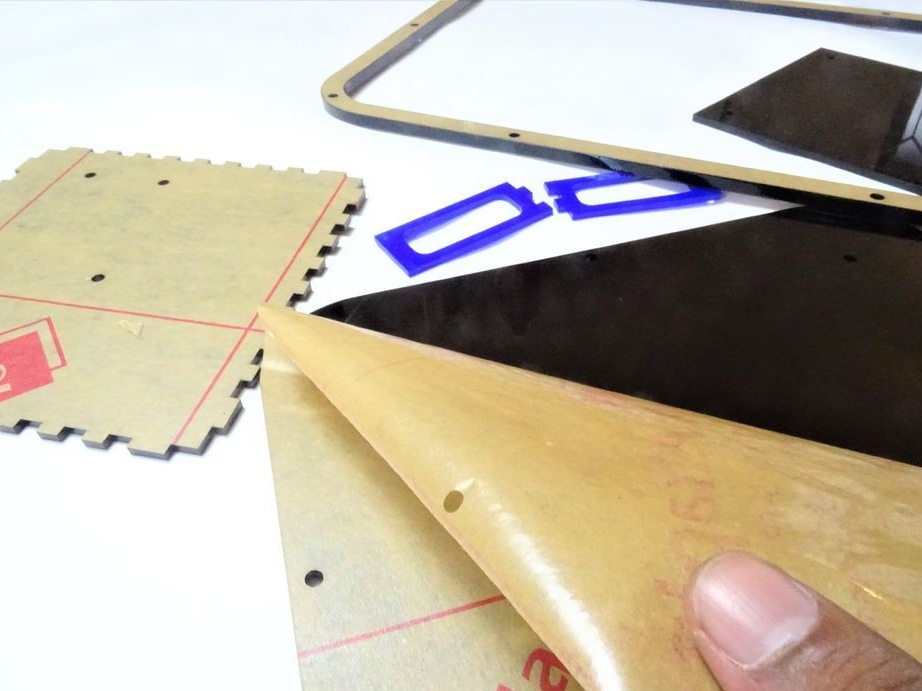
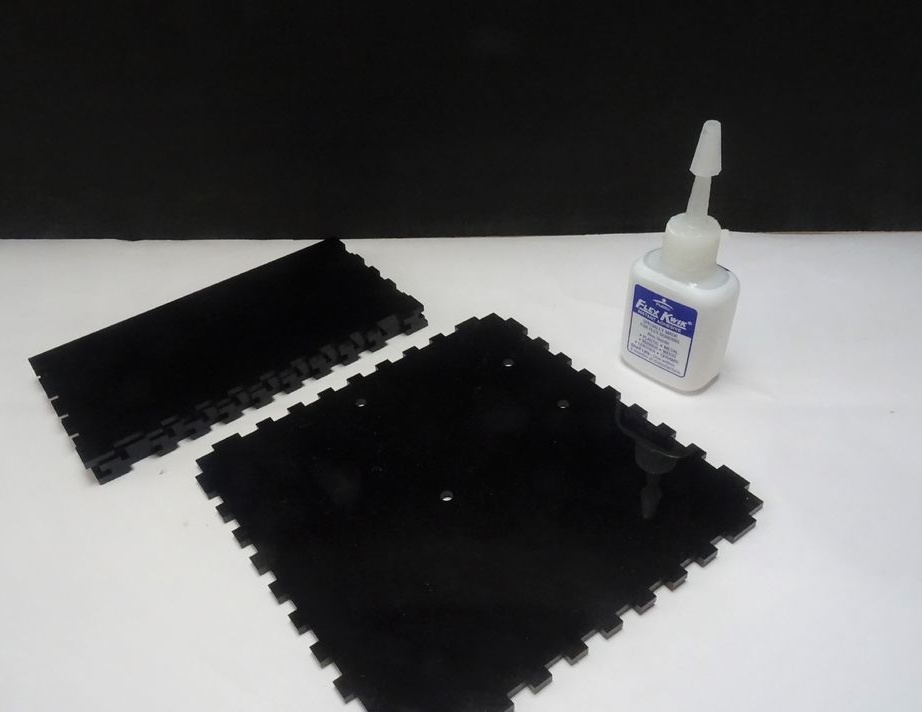
Krok drugi: cięcie laserem
W przypadku pojazdu terenowego mistrz użył akrylu o różnych grubościach i kolorach.
Czarna warstwa wierzchnia 3 mm x 1
Dolna warstwa Czarna 3 mm x 1
Czarna rama boczna 5 mm x 2
Ściana boczna przezroczysta 2 mm x 1
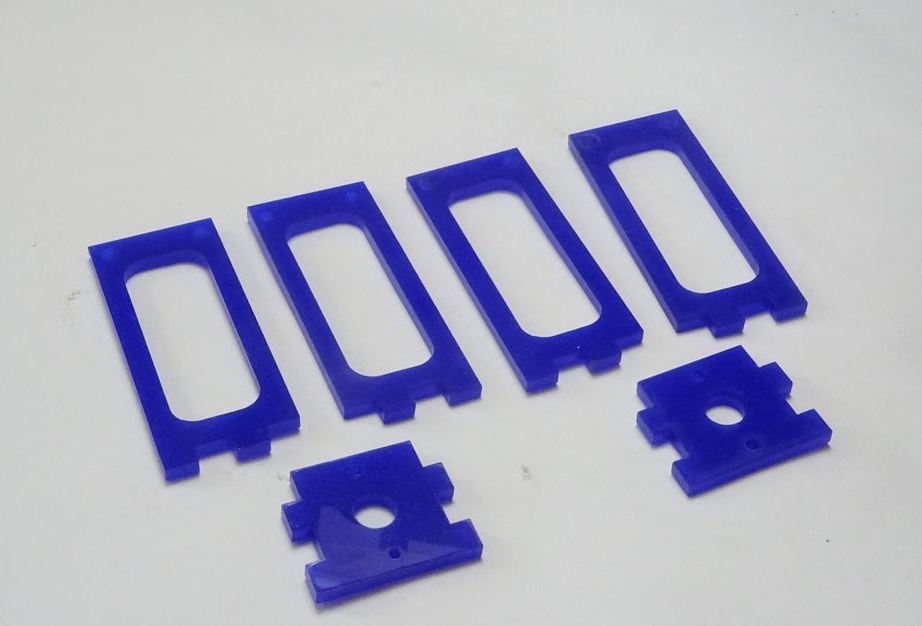
Strona mocy niebieska 3 mm x 4
Mostek górny niebieski 3 mm x 2
Silnik DisK White 3 mm x 2
Koło przednie białe 10 mm x 2
Wewnętrzna obręcz (tylne koło) biała 3 mm x 4
Zewnętrzna obręcz (tylne koło) Biała 10 mm x 2
Kierownica biała 3 mm x 1
Szafka z szufladami Czarny 3 mm x 1
Czarna pokrywa komory 3 mm x 1
Tylny wał silnika Biały 3 mm x 2
Panel przedni biały 5 mm x 2



Możesz pobrać plik dla CNC z linku.
Laser Cutting Rover Parts.zip
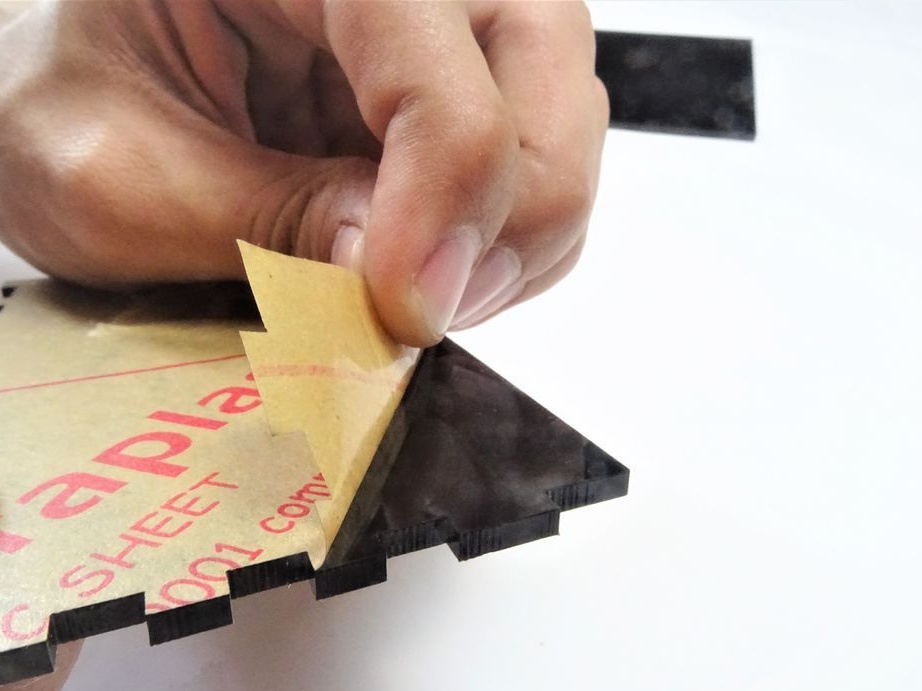
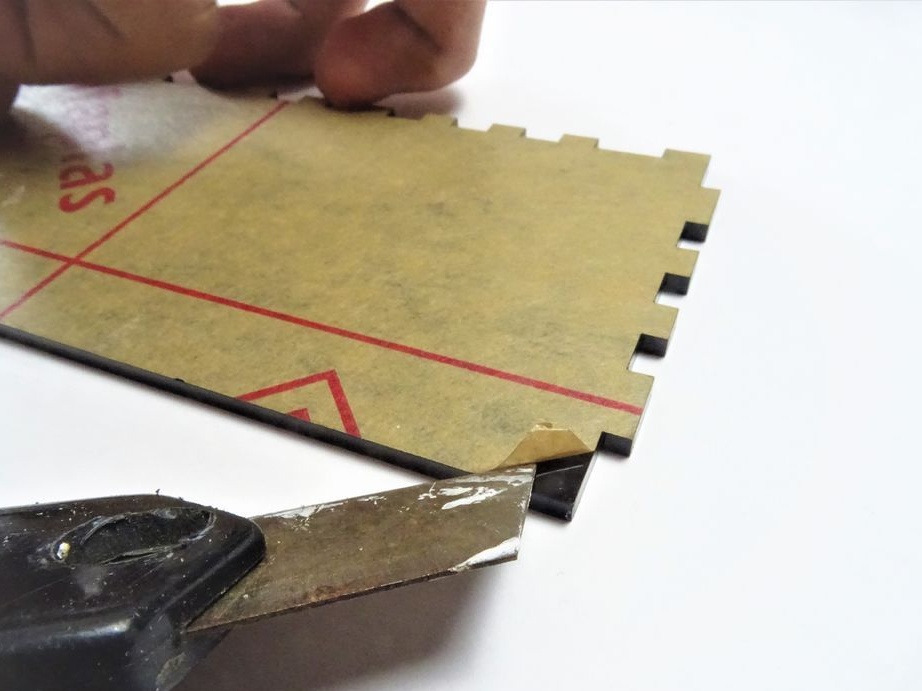
Po wytworzeniu części usuwa z nich warstwę ochronną.
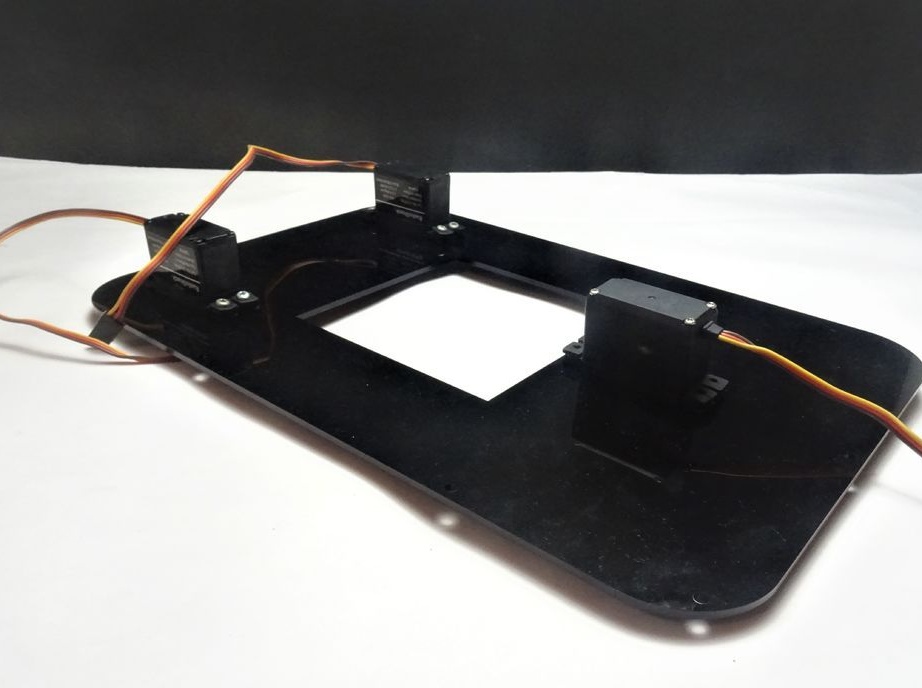
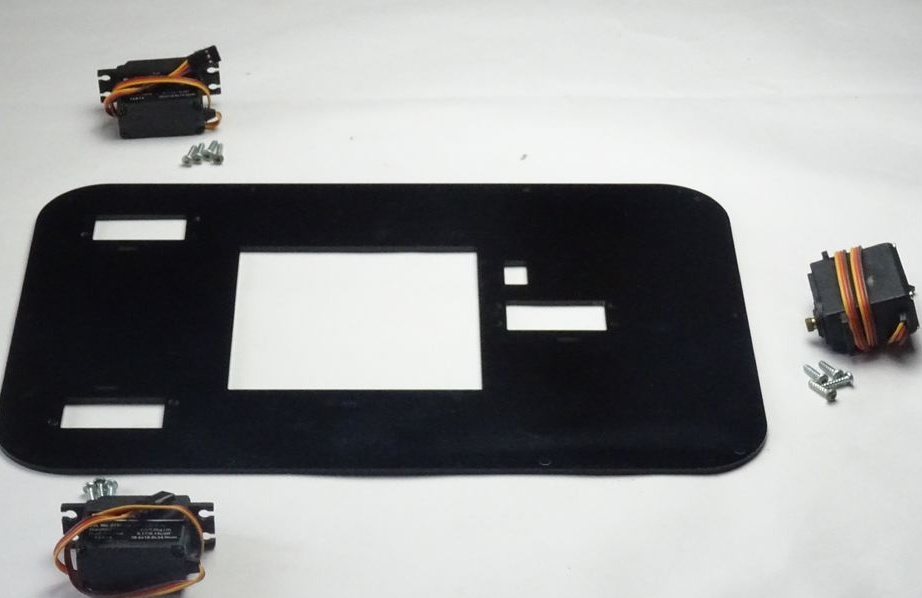
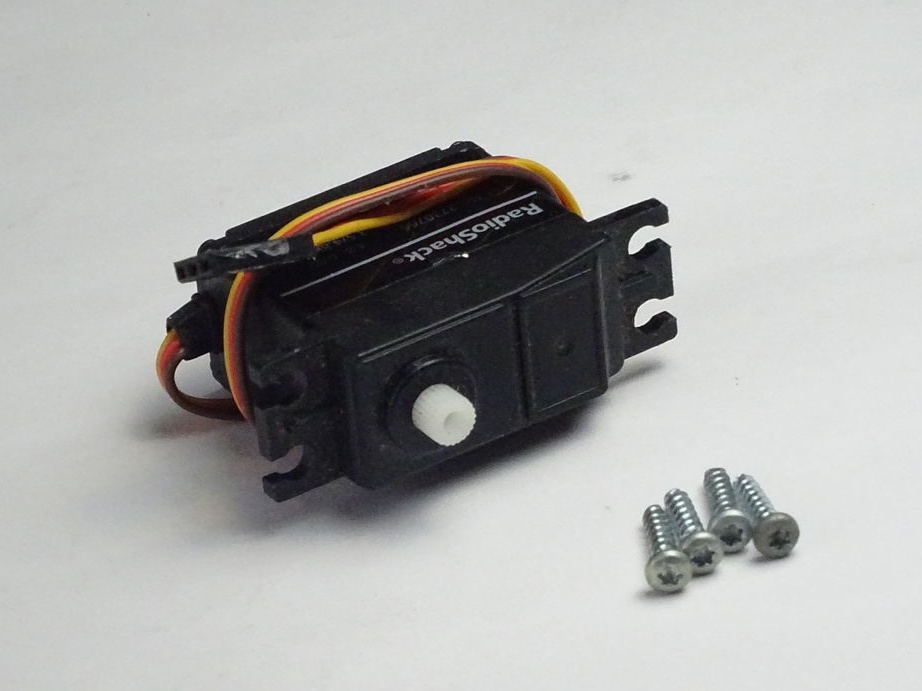
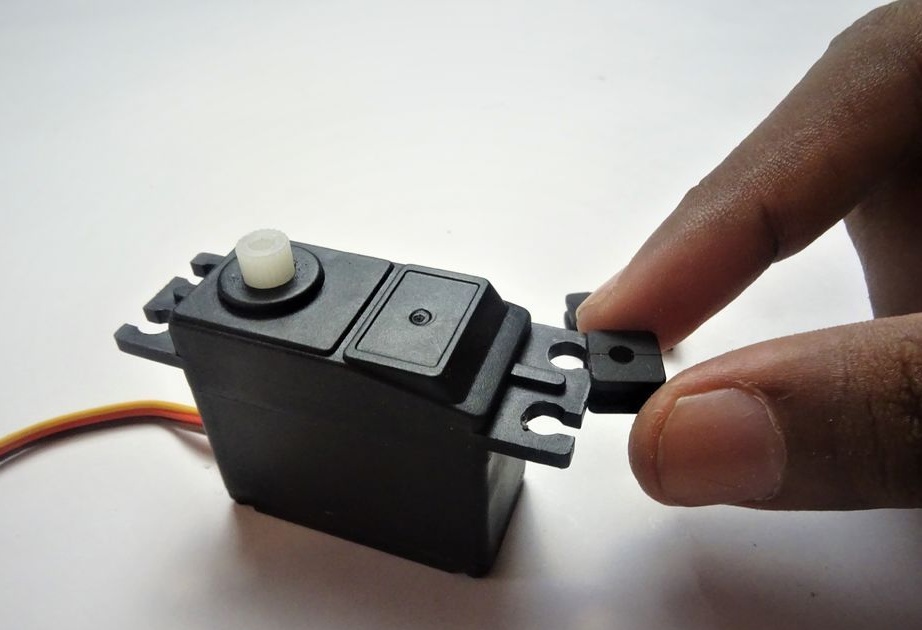
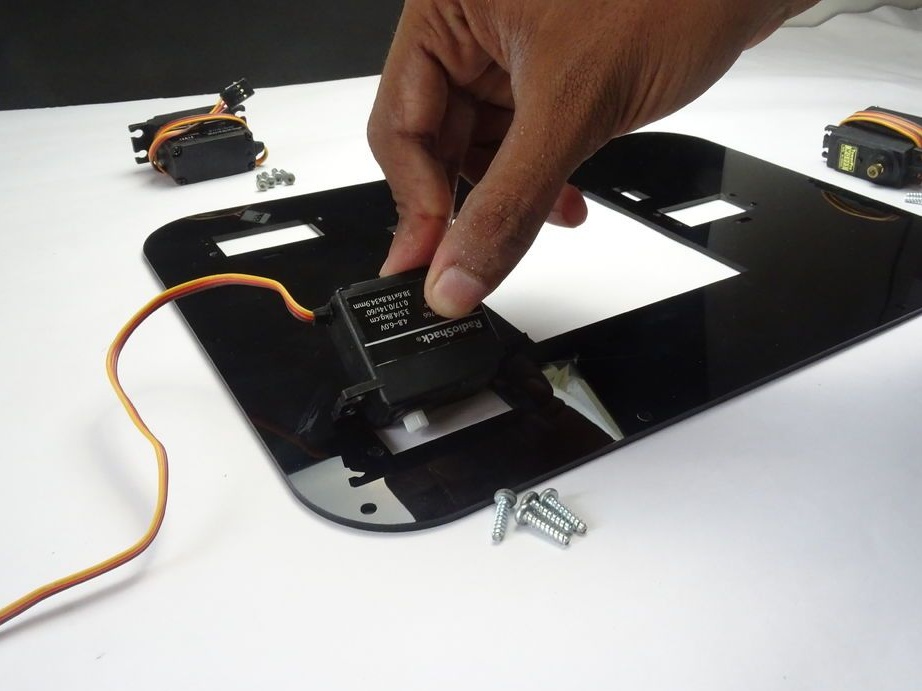
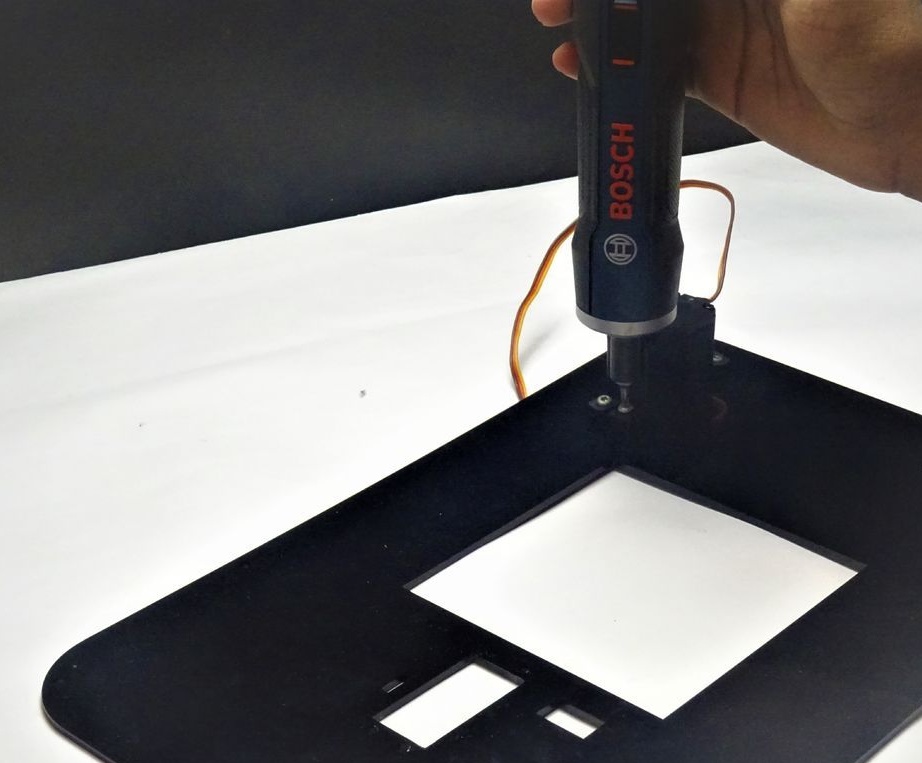
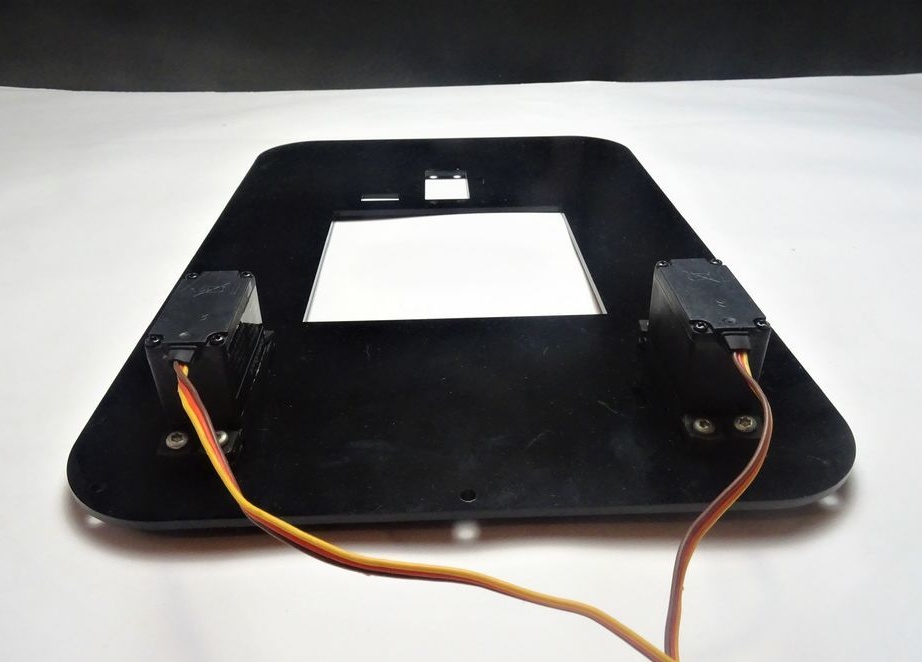
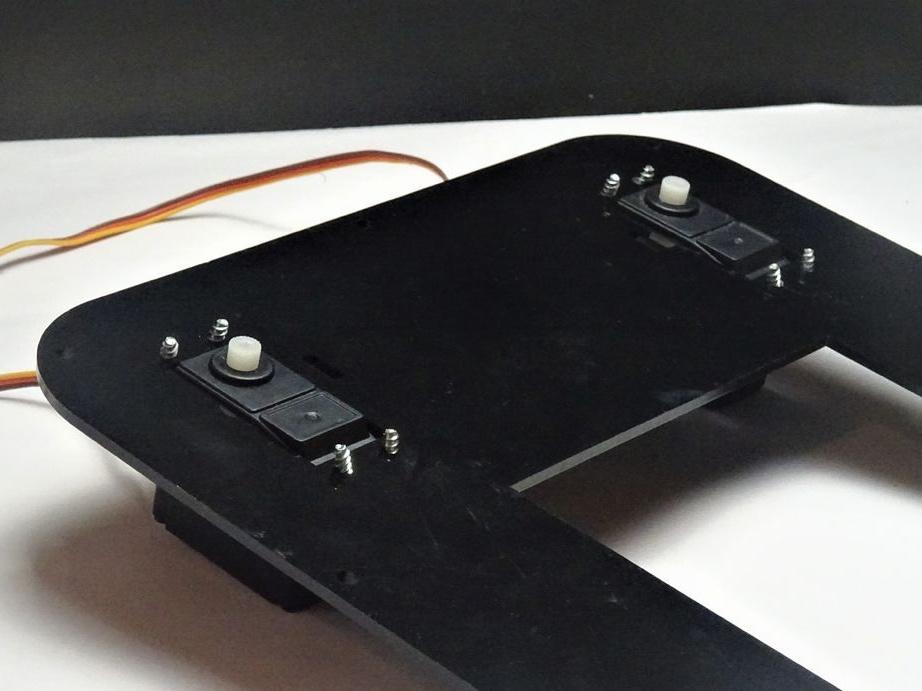
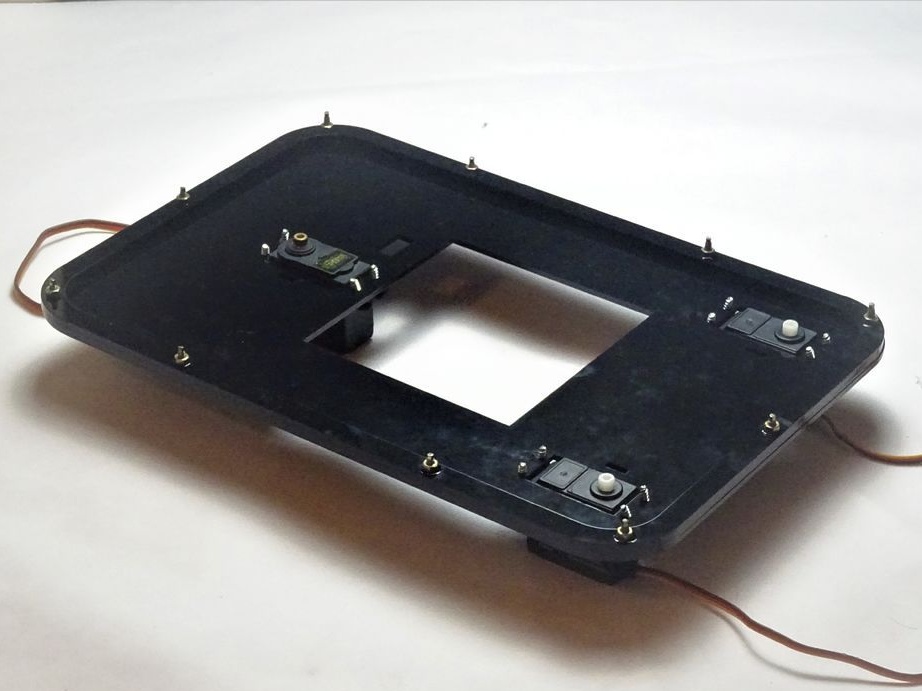
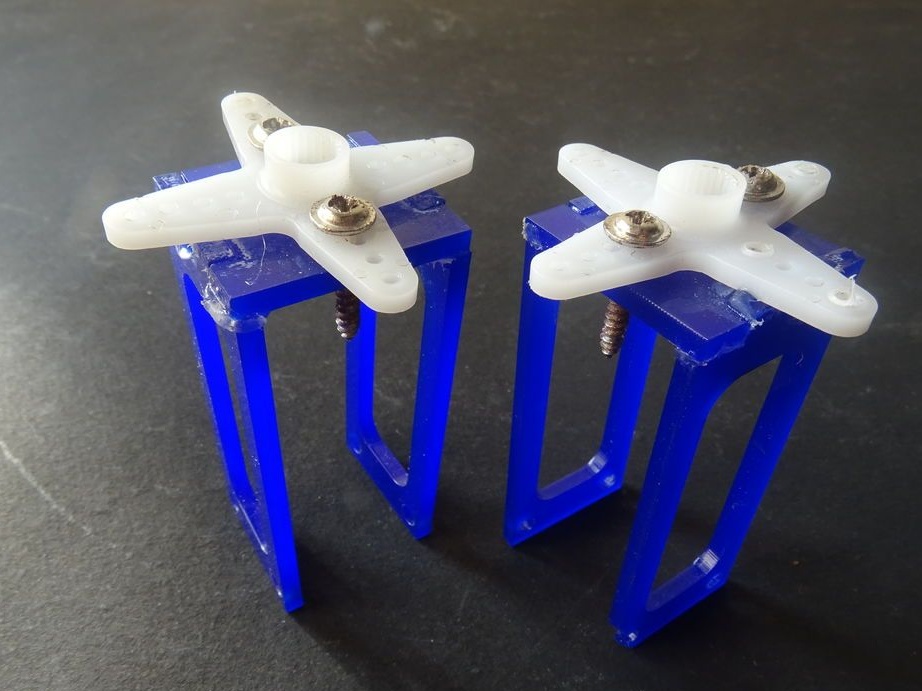
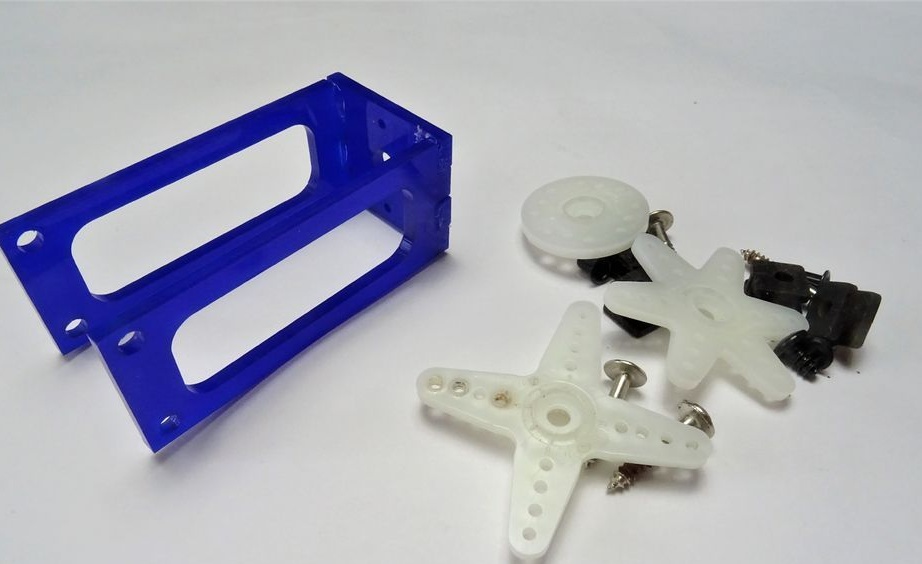
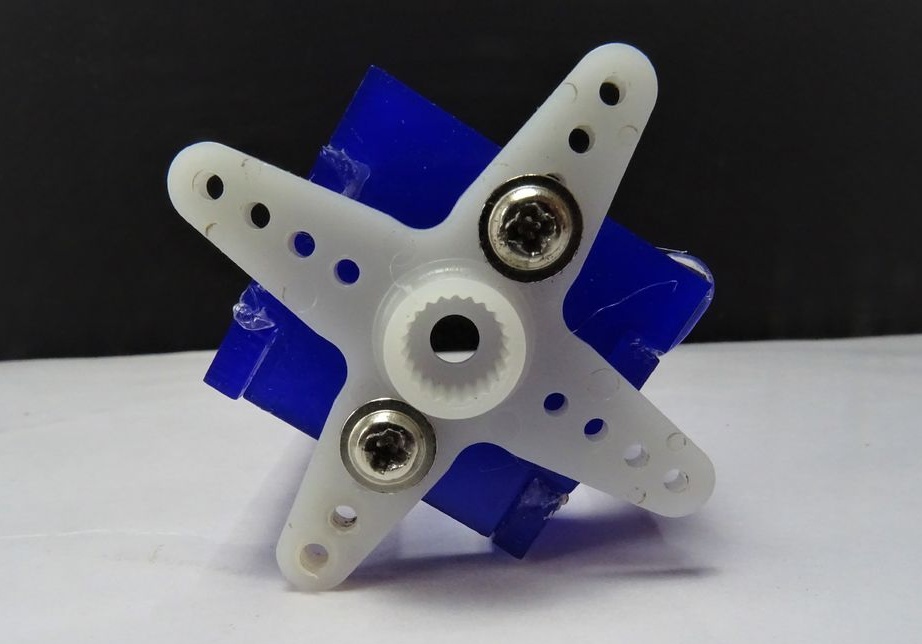
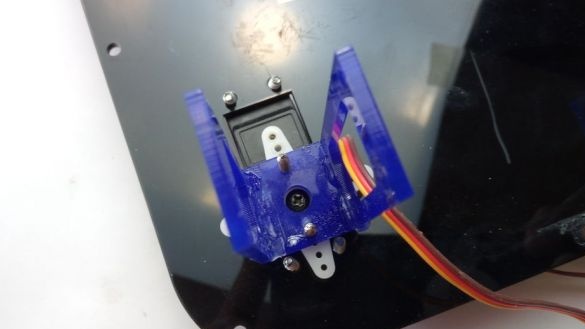
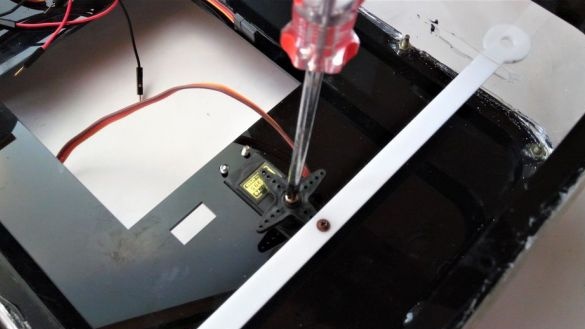
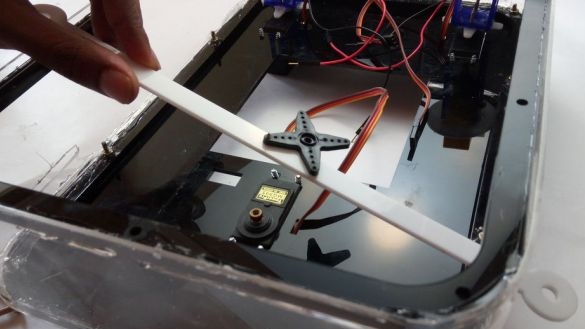
Krok trzeci: zainstaluj serwosilniki
Wszystkie trzy siłowniki są przykręcone do platformy. Dwa z tyłu i jeden z przodu.

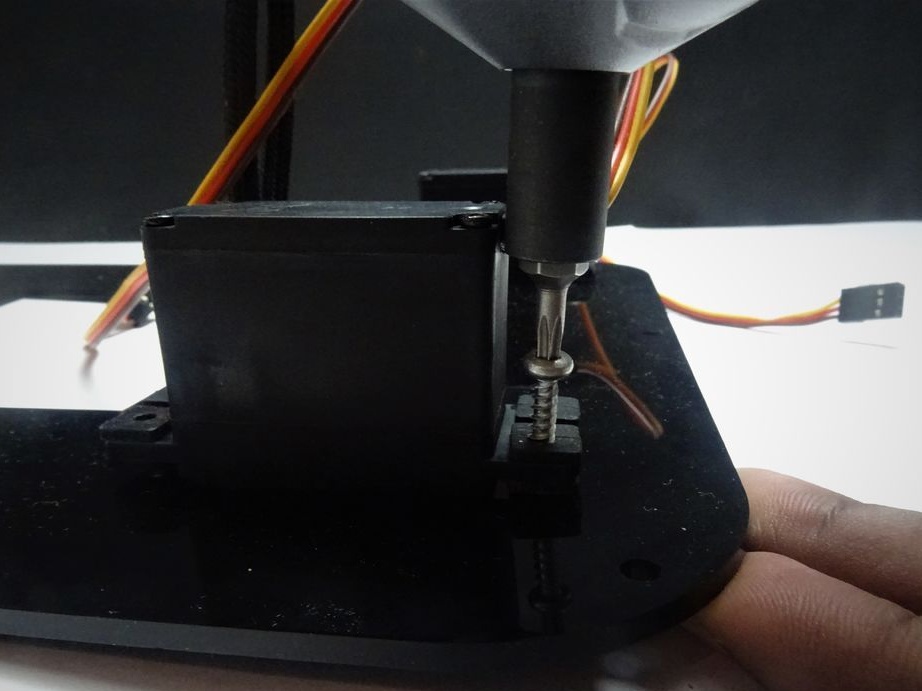
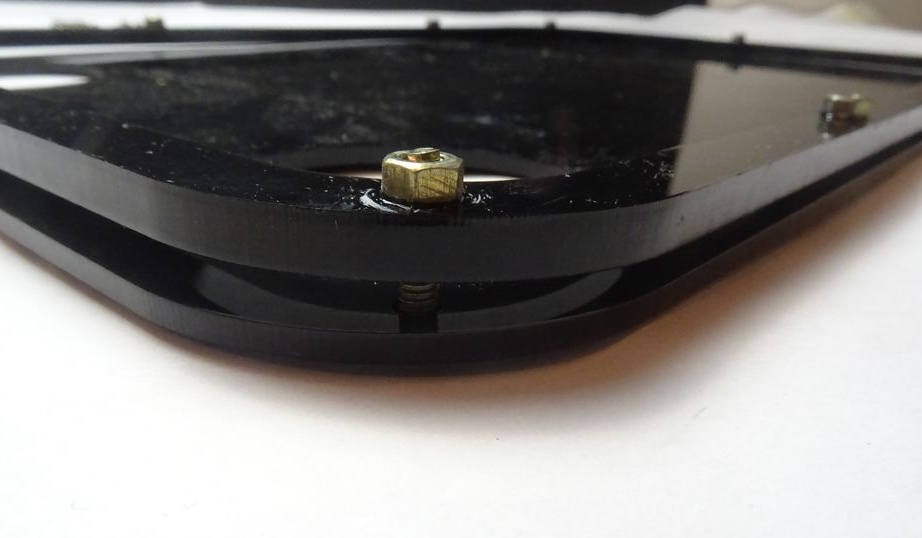
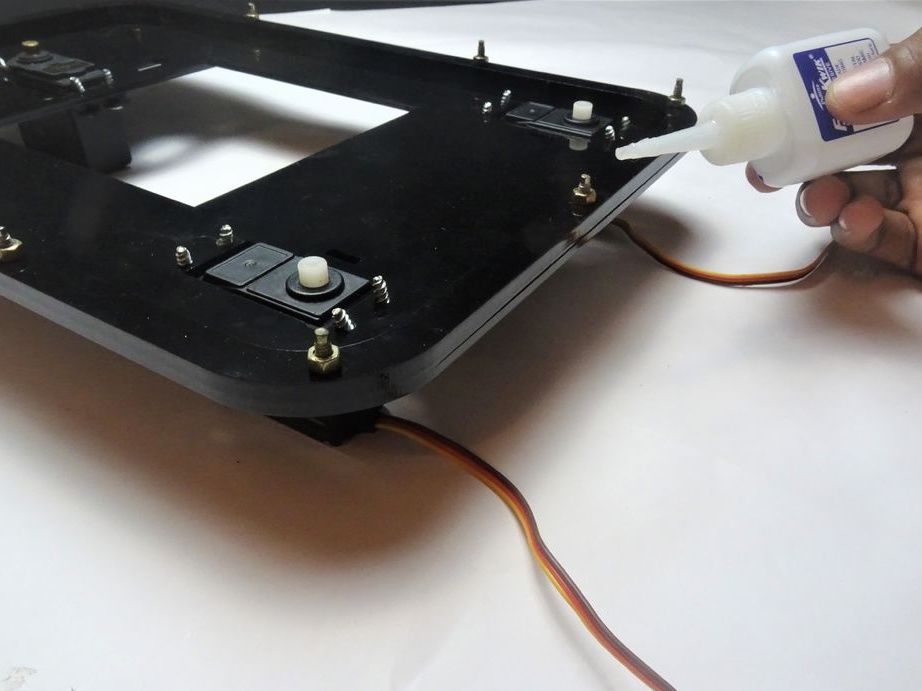
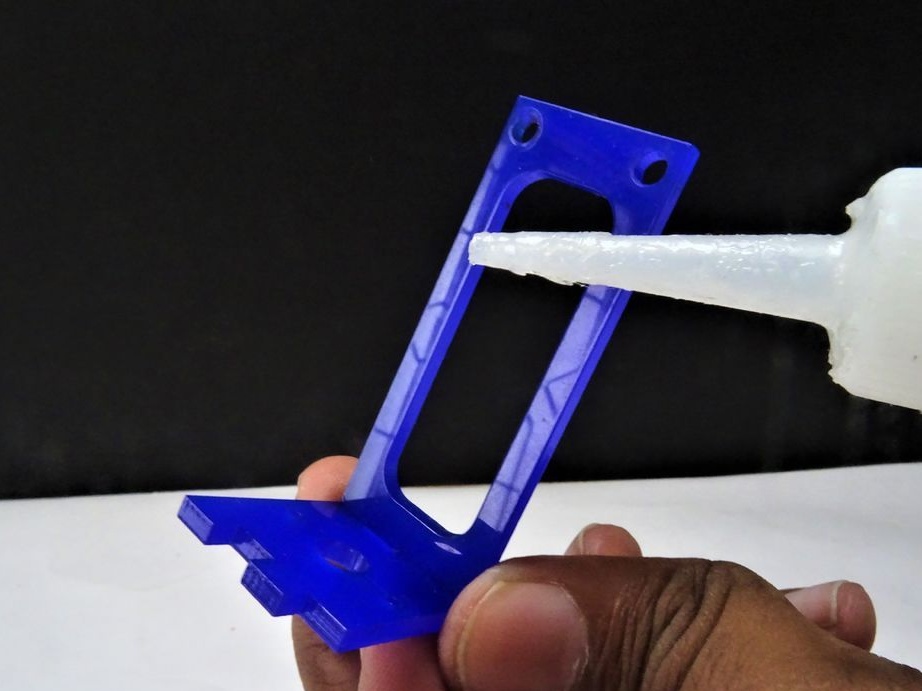
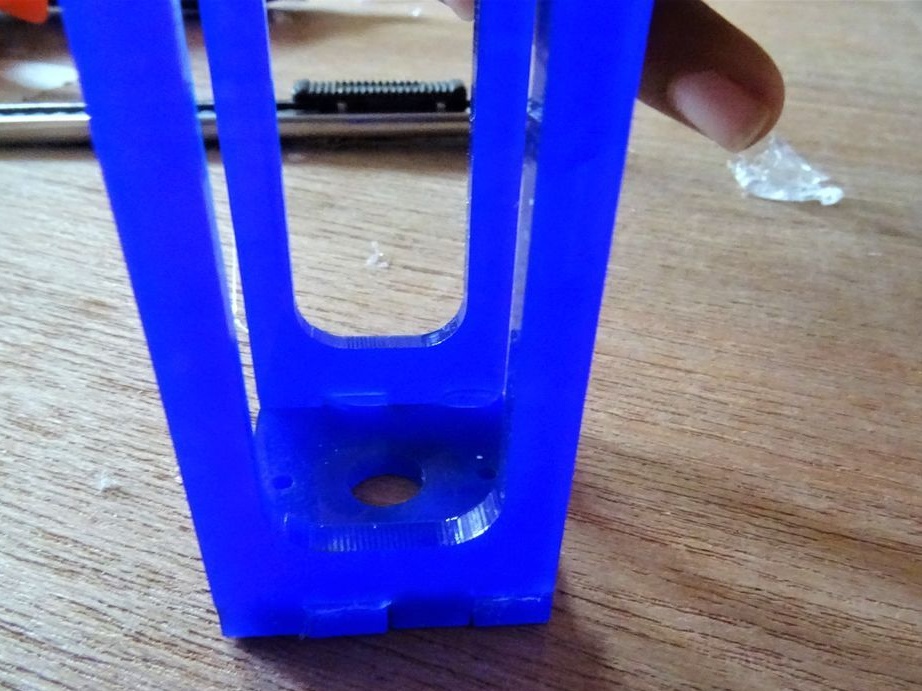
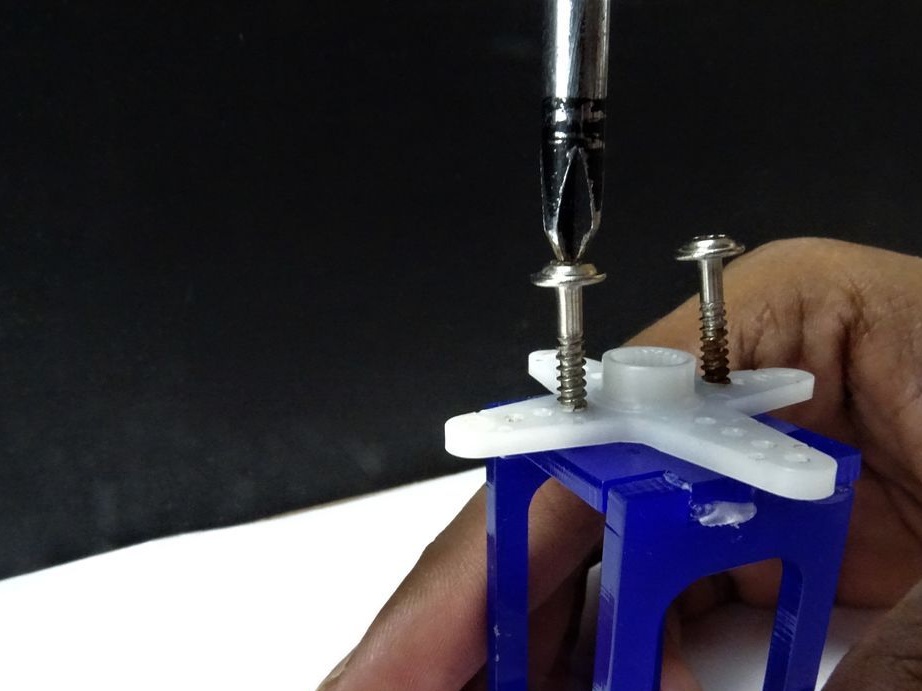
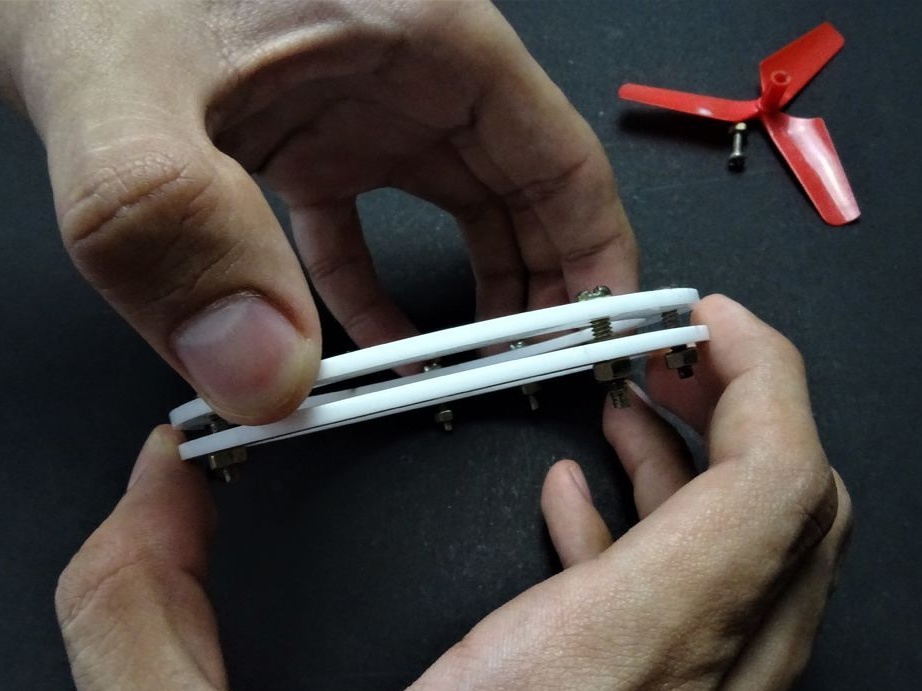
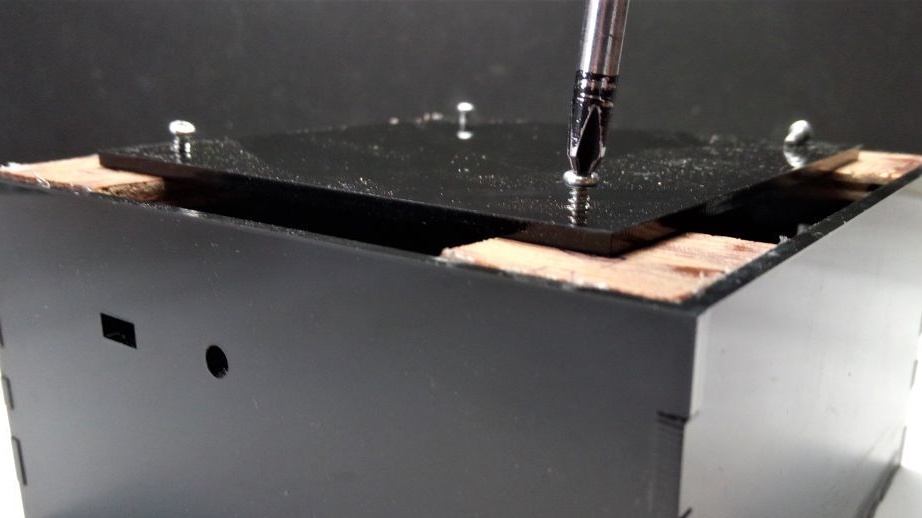
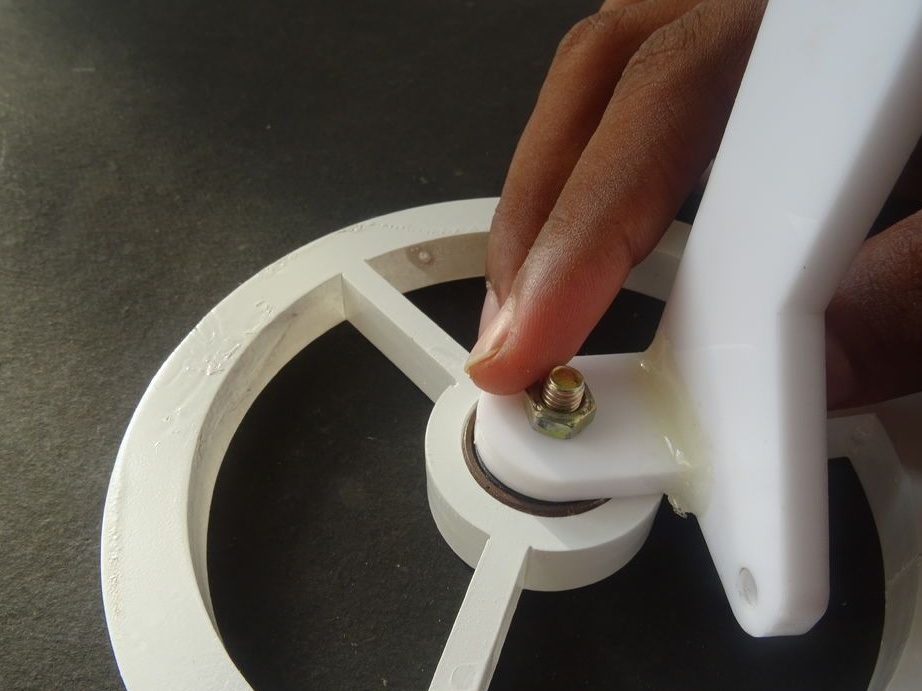
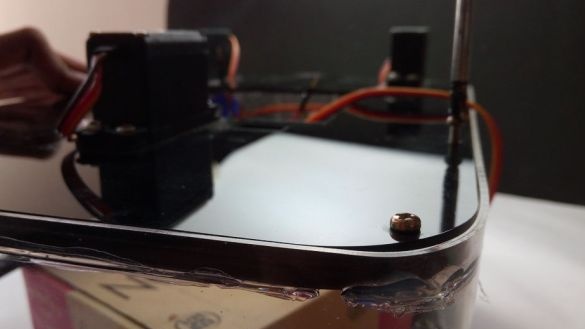
Krok czwarty: orzechy
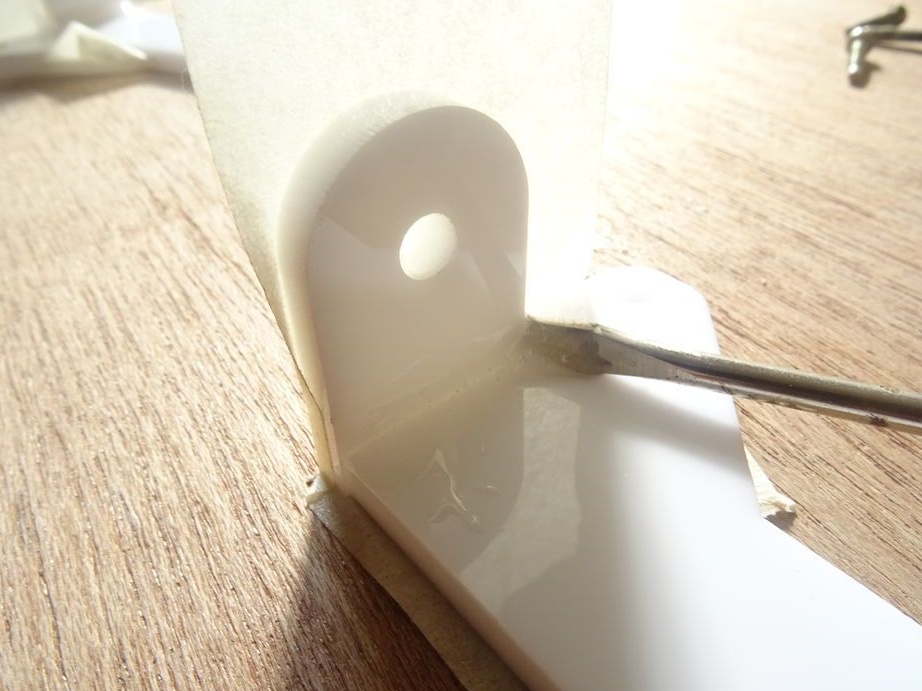
Aby uzyskać dostęp do mechanizmów, górna i dolna część są ze sobą połączone śrubami. Przyklej nakrętki superkleju do ramy, a następnie wzmocnij go żywicą epoksydową.


Krok piąty: Unosi się
Klej płynie.



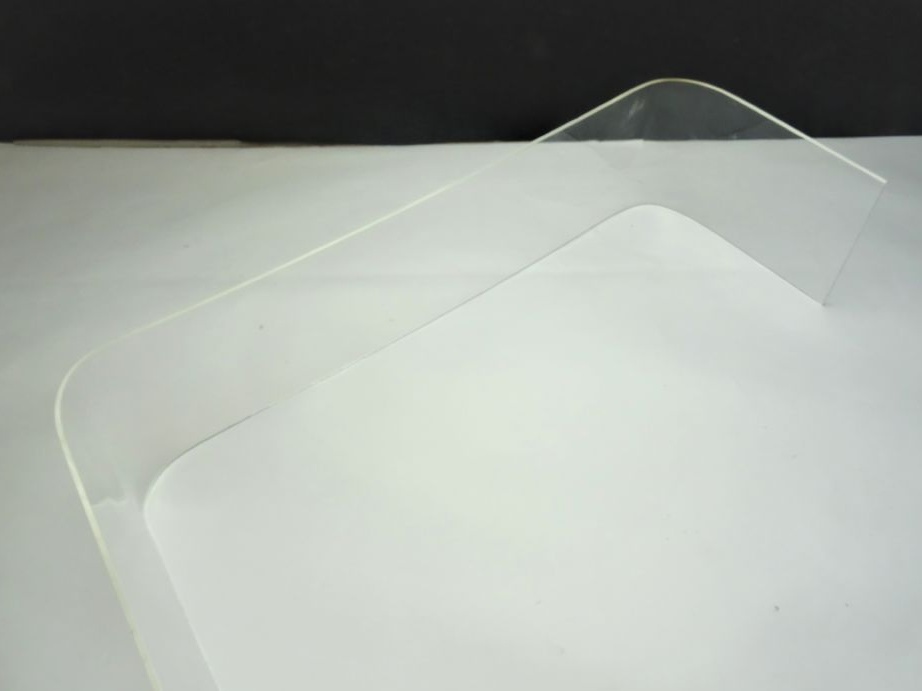
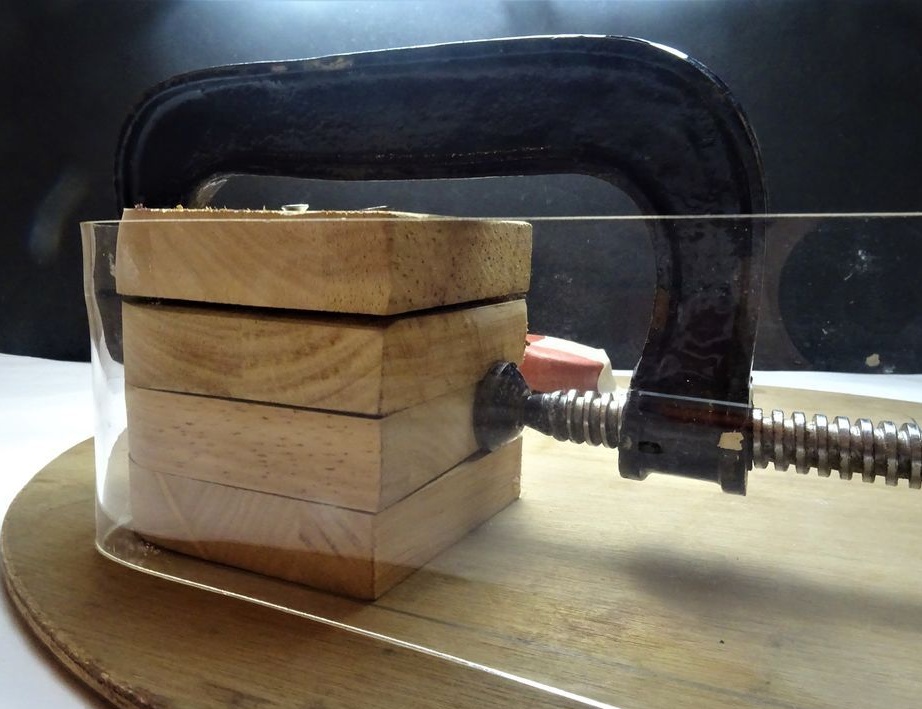
Krok szósty: kształtowanie akrylu
Do gięcia akrylu rzemieślnik wykonuje szablon z drewna.



Zaciska część za pomocą zacisku i, podgrzewając ją suszarką do włosów, nadaje tej części pożądany kształt.





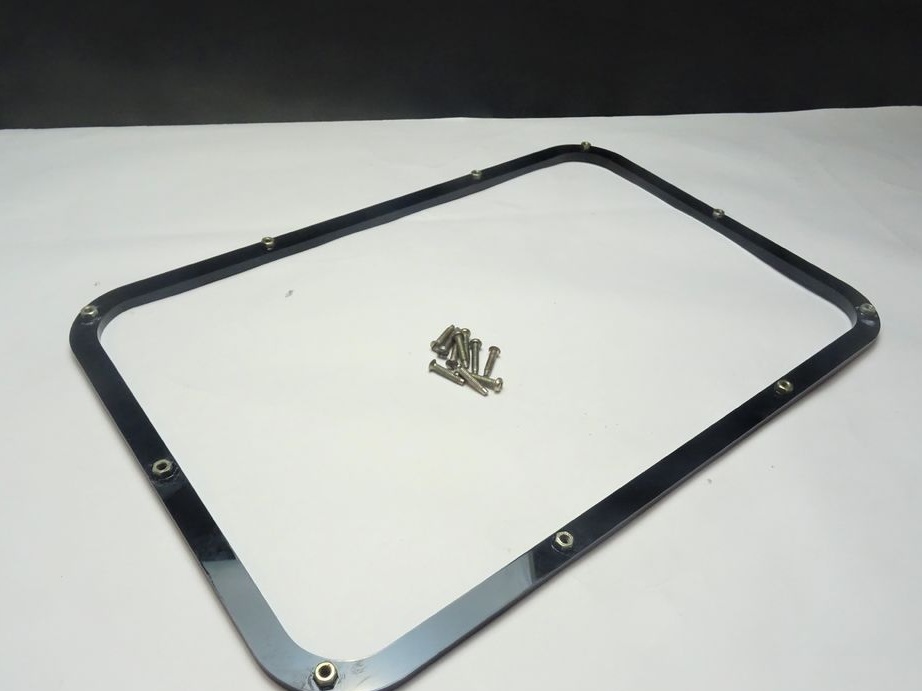
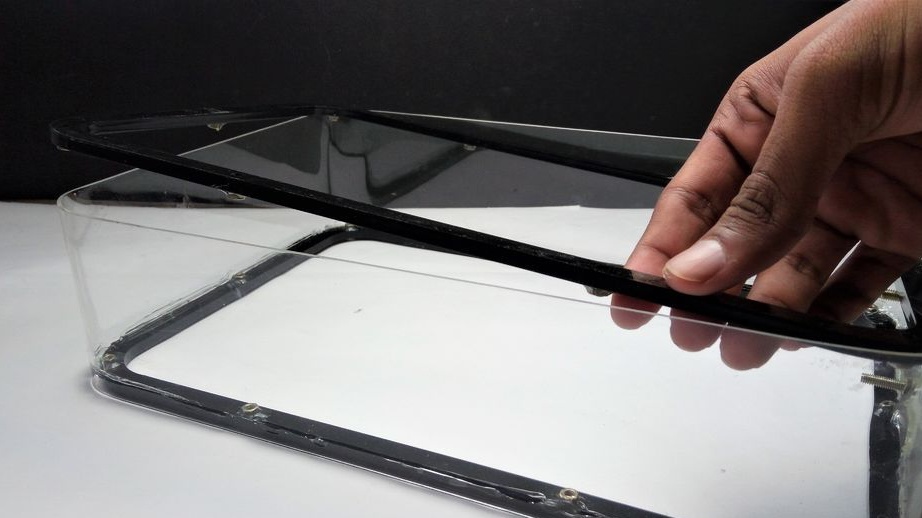
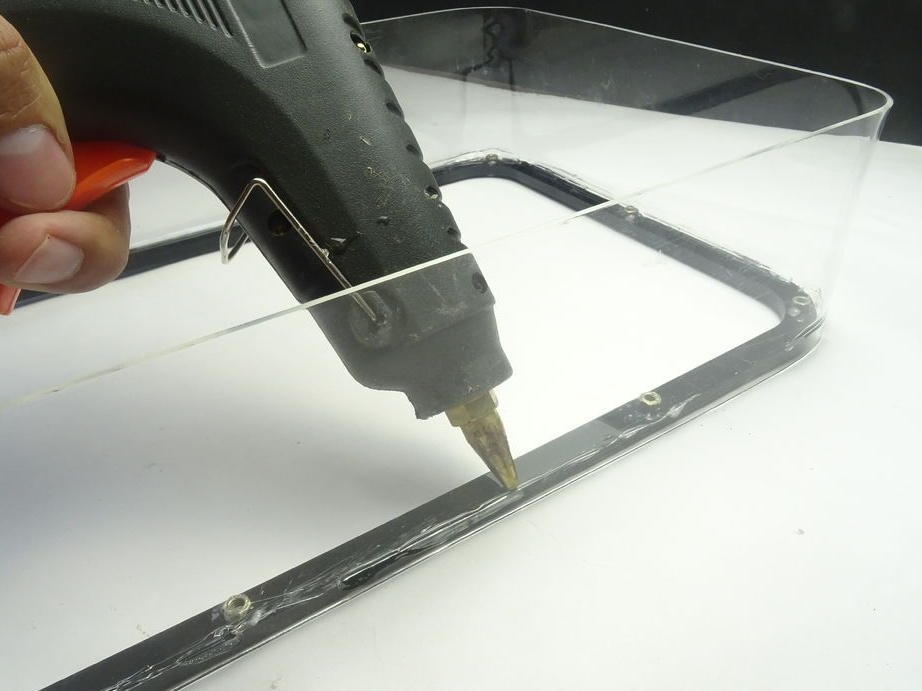
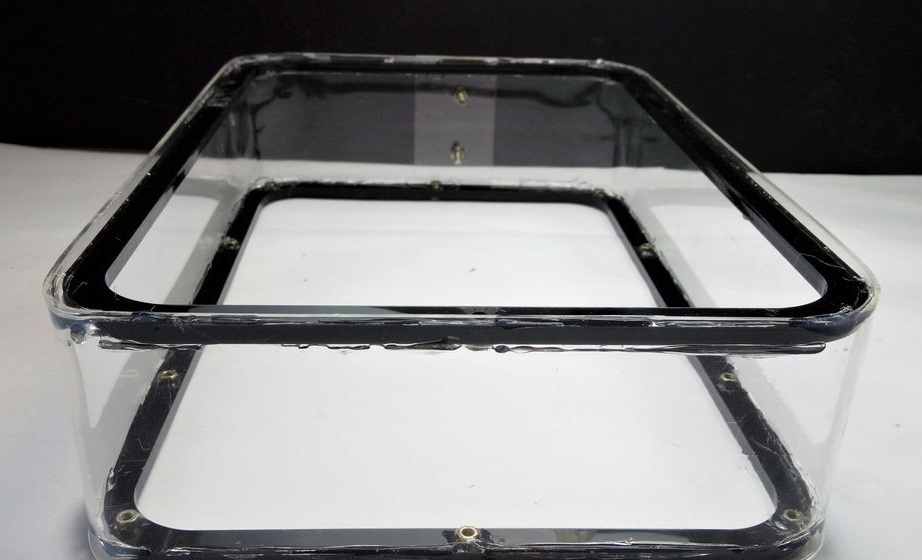
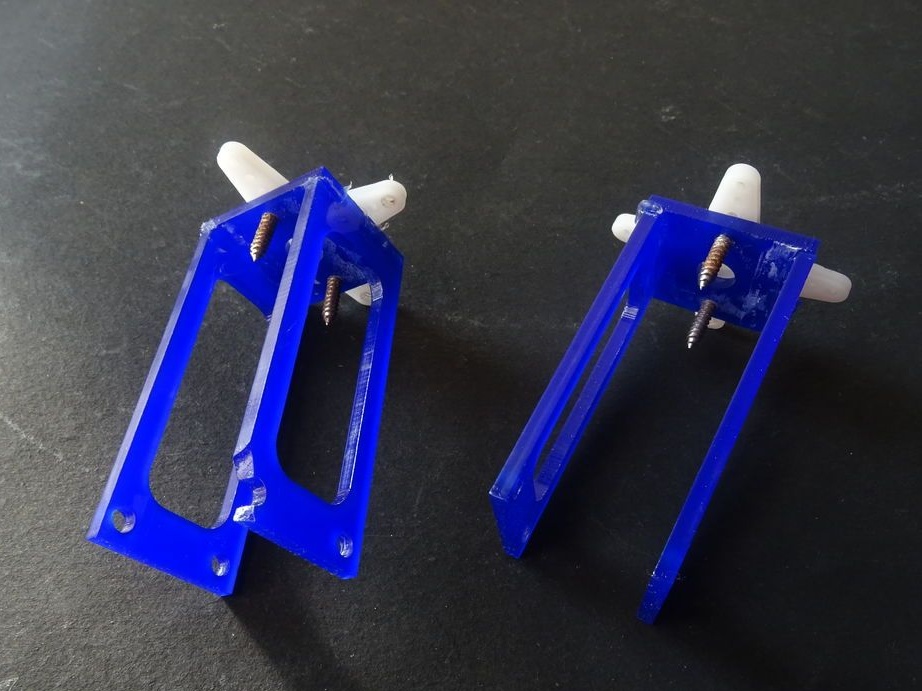
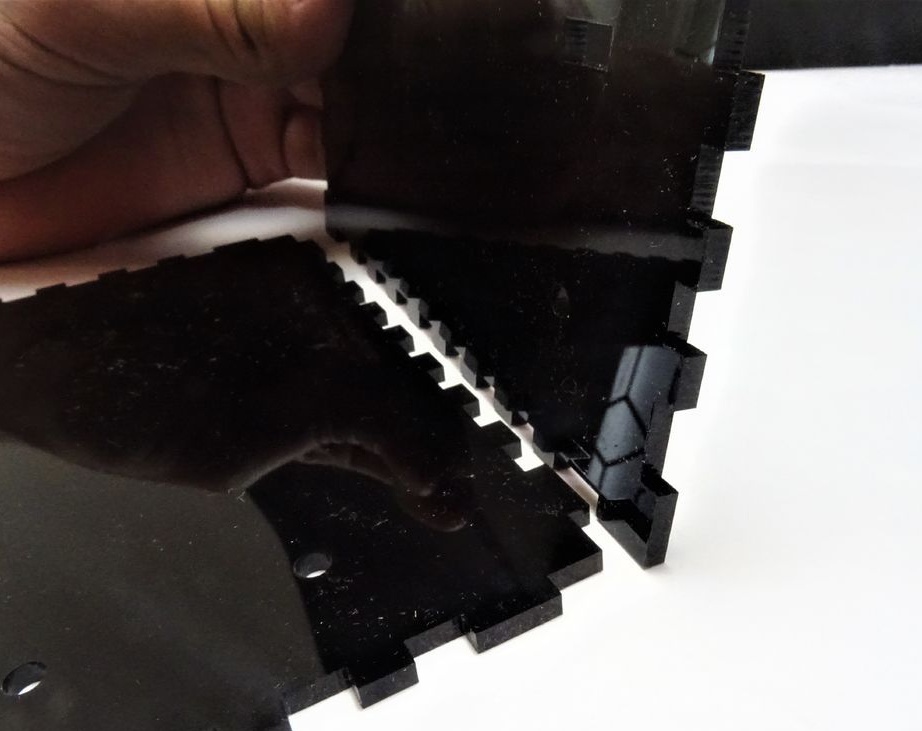
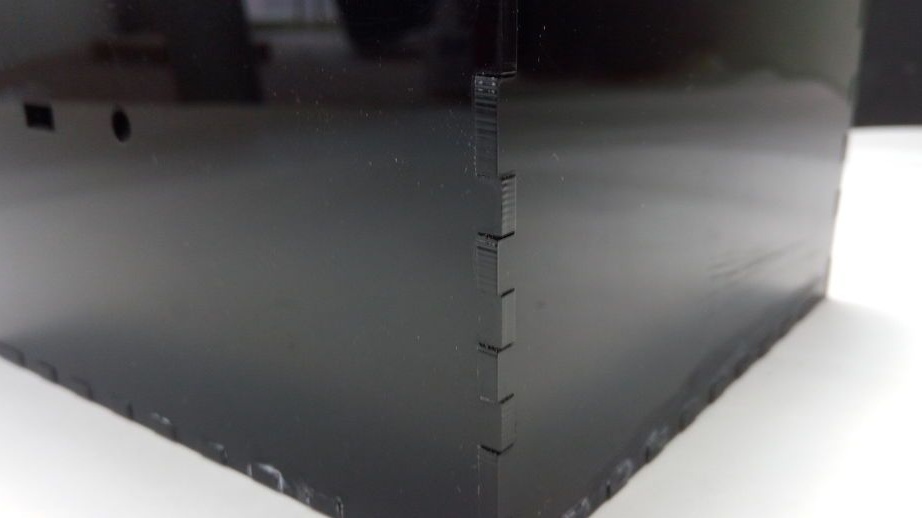
Siódmy krok: ramy
Przyklej górną i dolną ramkę do przezroczystego korpusu. Szwy są starannie uszczelnione gorącym klejem.







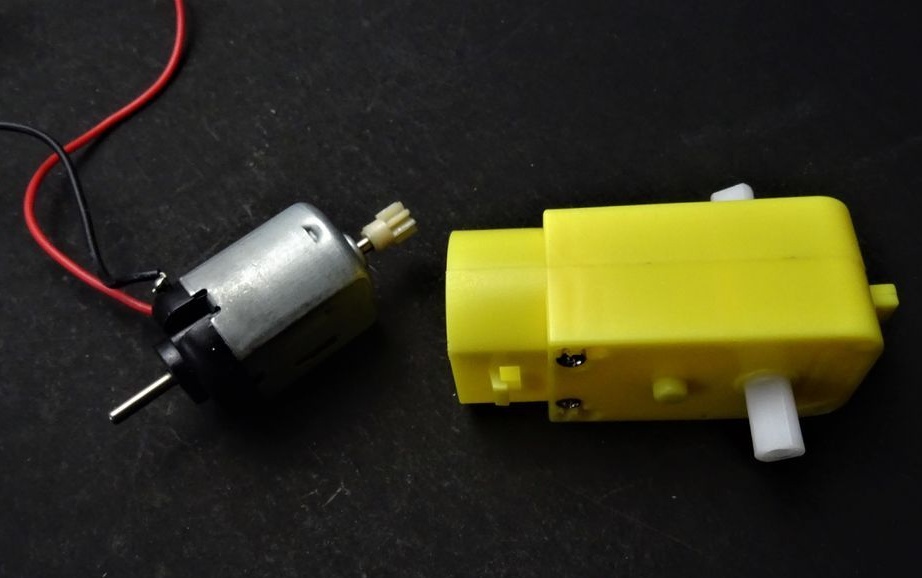
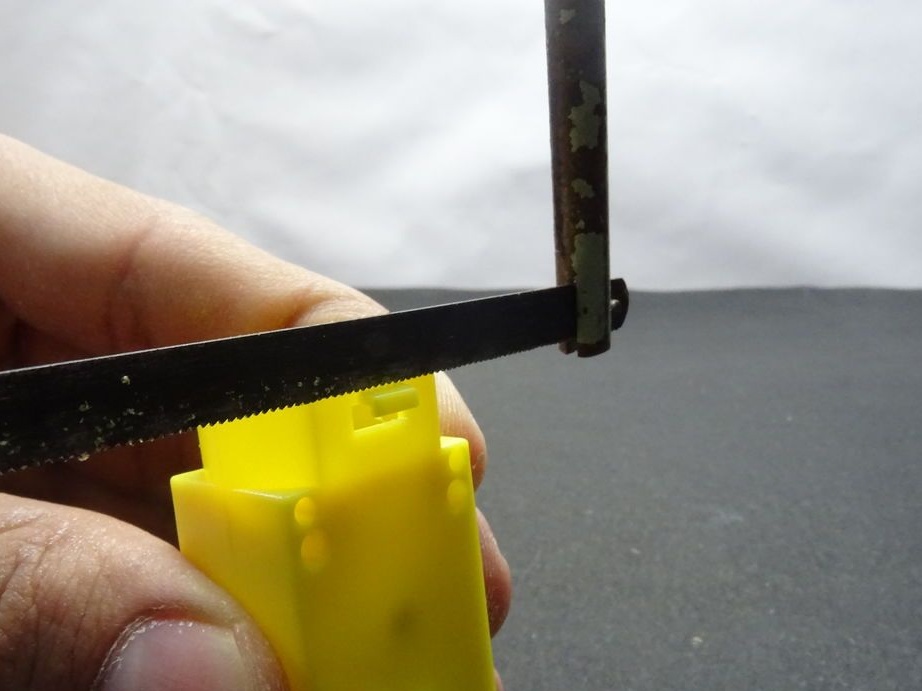
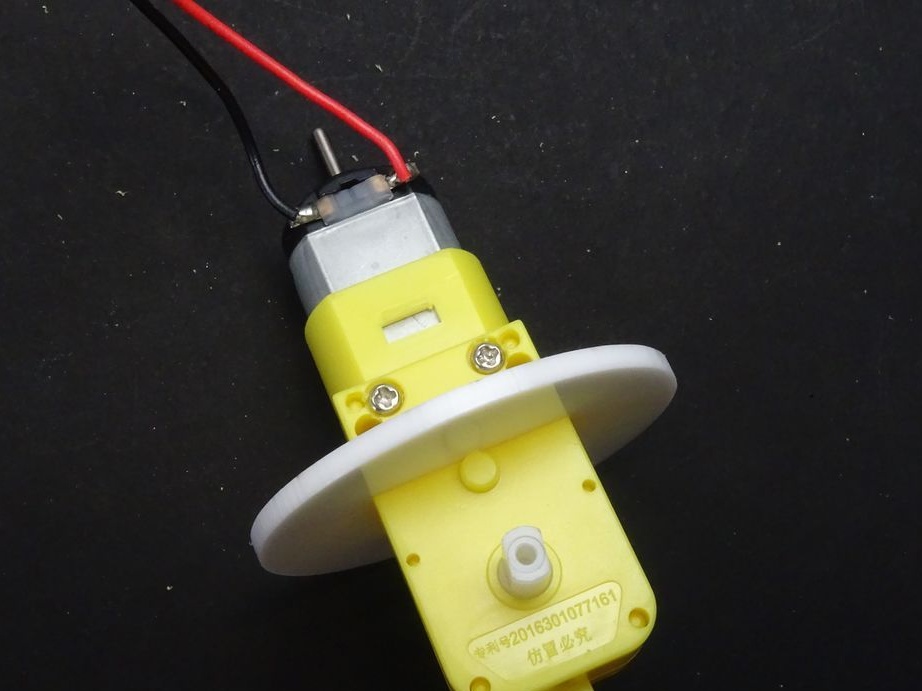
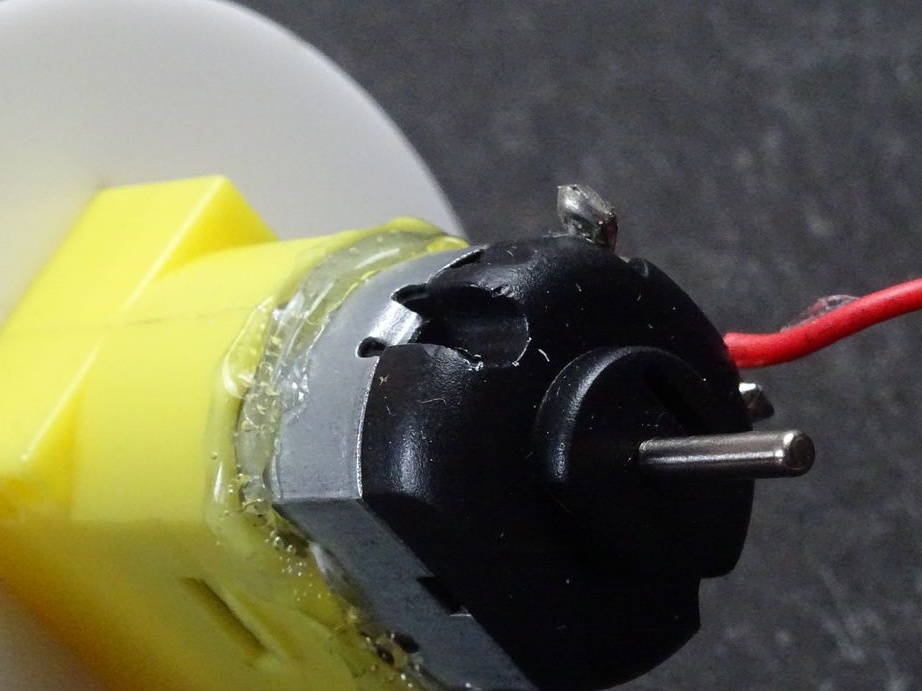
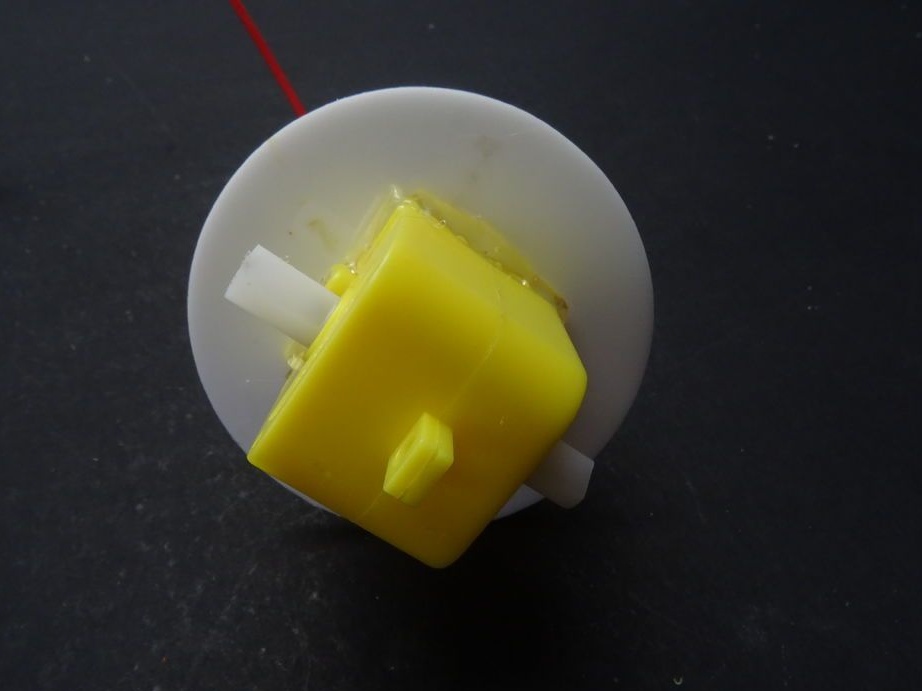
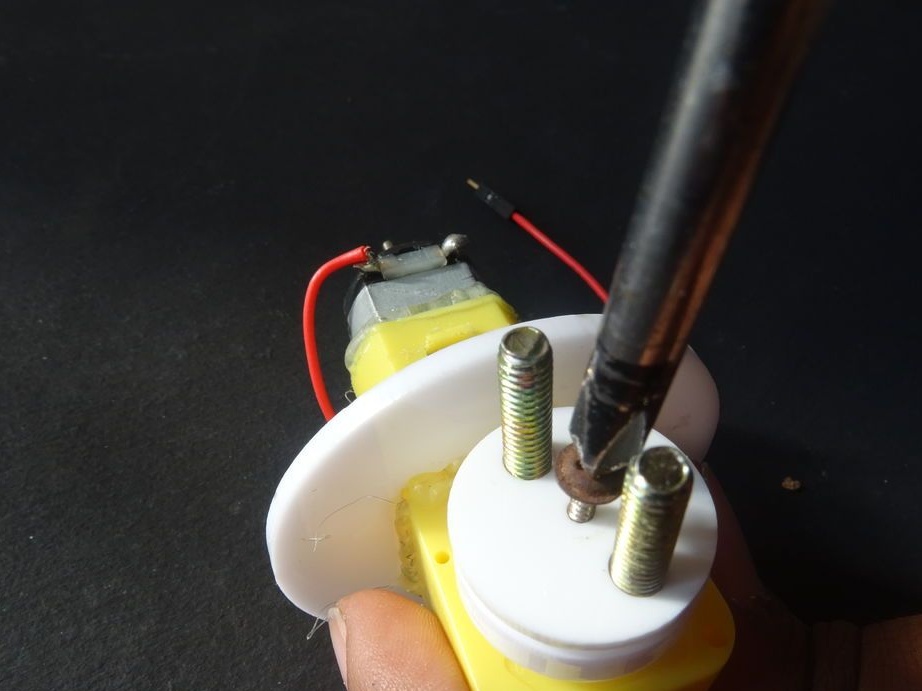
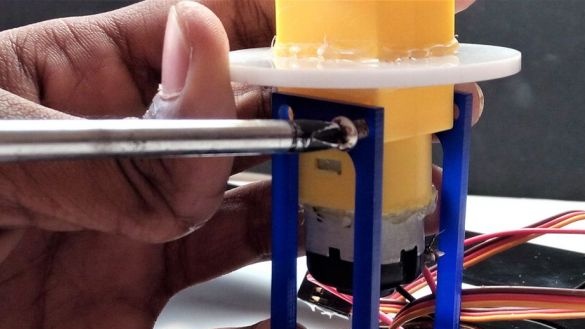
Krok ósmy: Tuning silnika
Teraz musisz przetworzyć obudowę silnika, aby zainstalować na niej części.
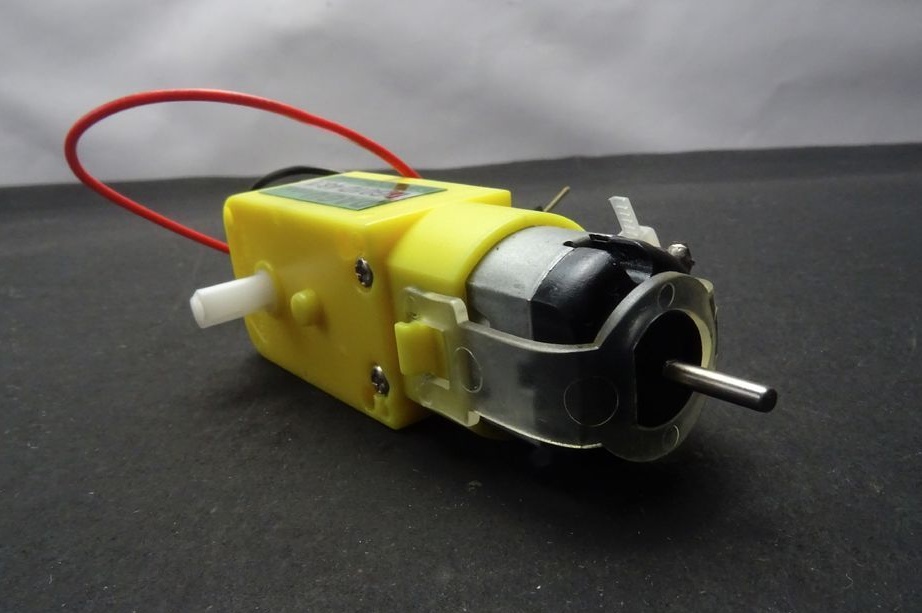

Odcina wszystkie wystające części od ciała aż do naklejki.
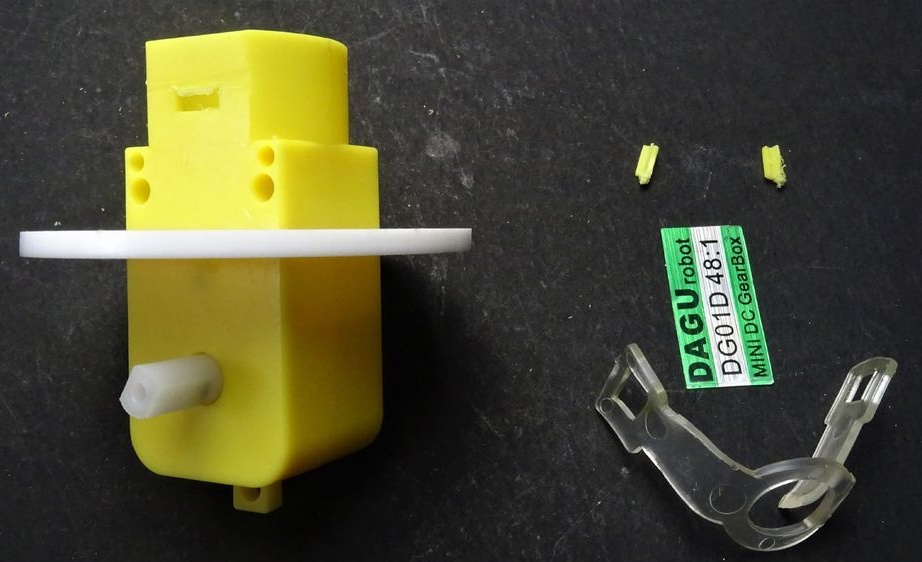

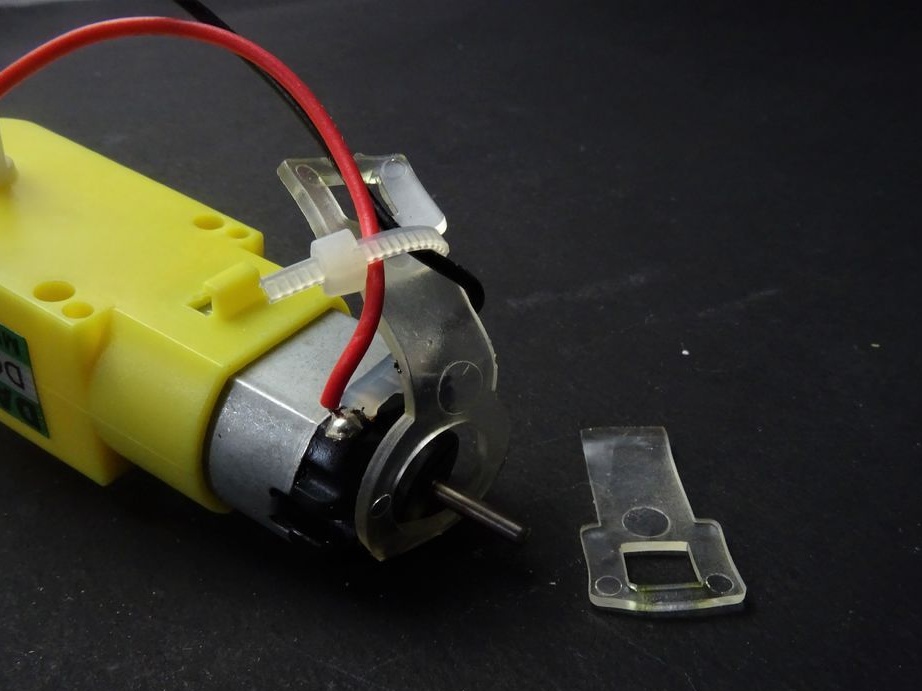


Instaluje część na ciele i przykleja ją. Ponieważ konieczne było odcięcie wspornika silnika (zatrzaski), silnik również mocuje się za pomocą kleju.

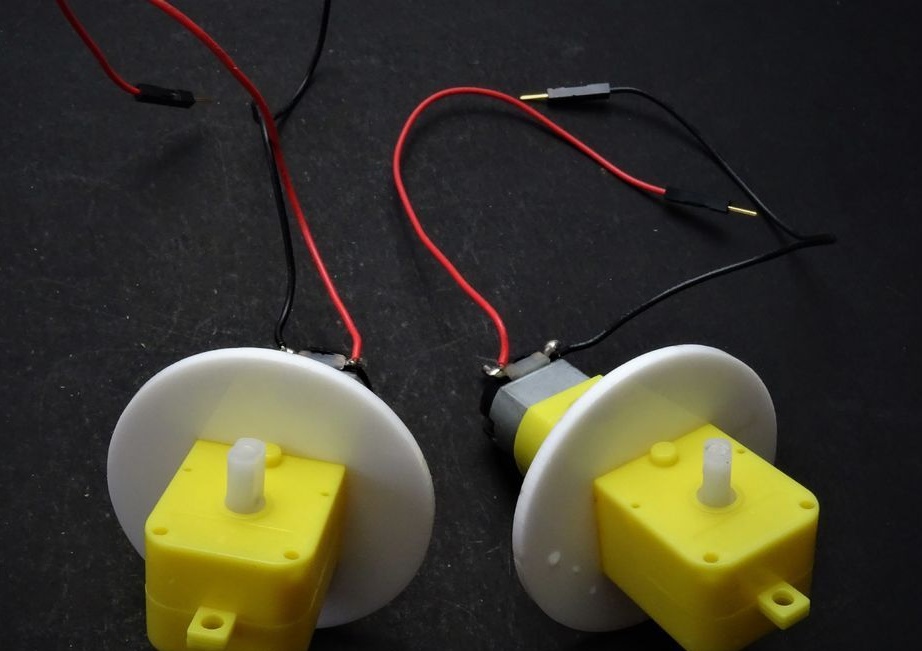

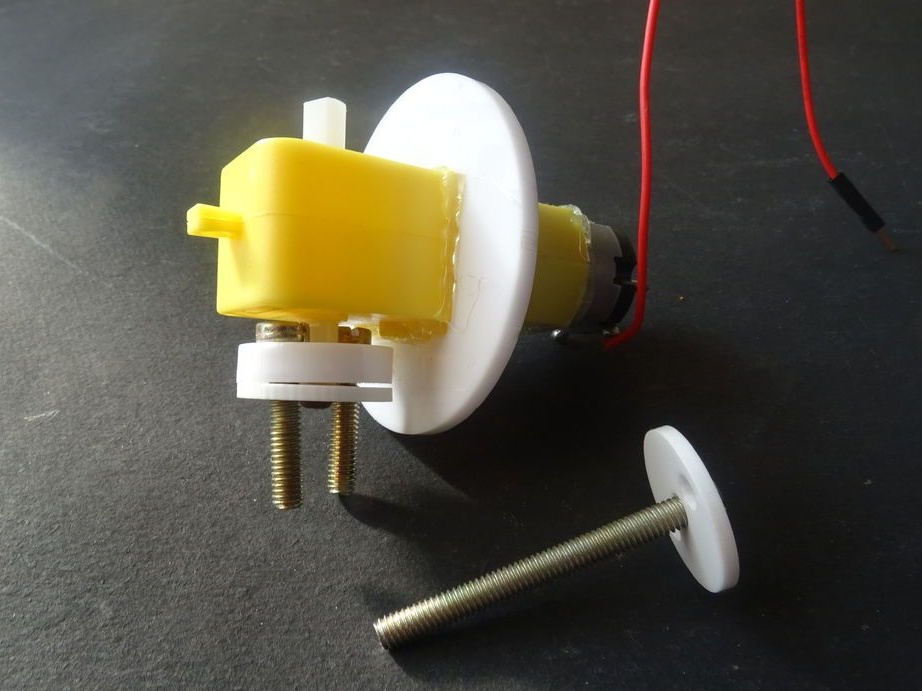
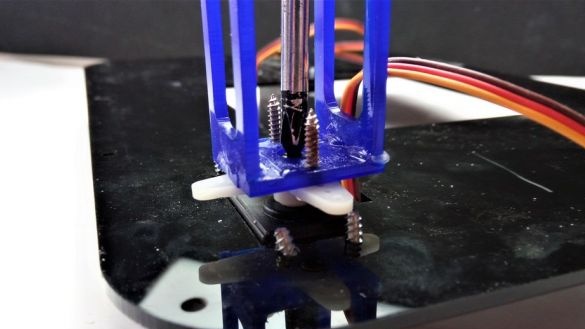
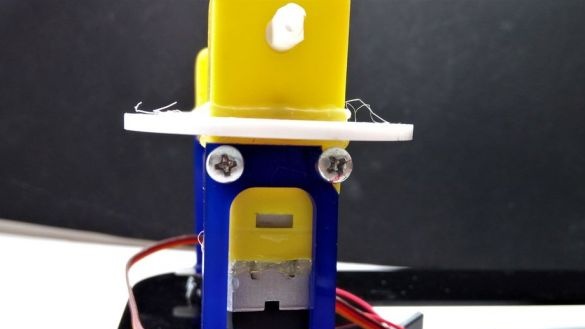
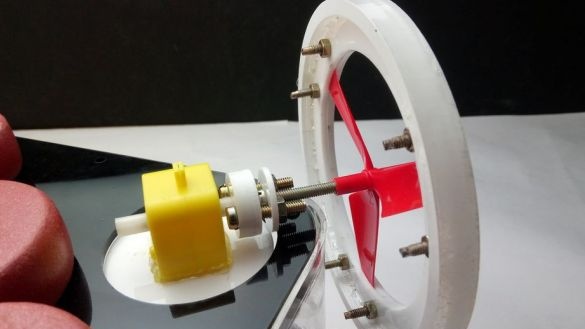
Krok dziewiąty: Mechanizm obrotowy
Montuje obrotową obudowę. Zostanie w nim zainstalowany silnik i połączy się on z serwonapędem.
Klei obudowę.

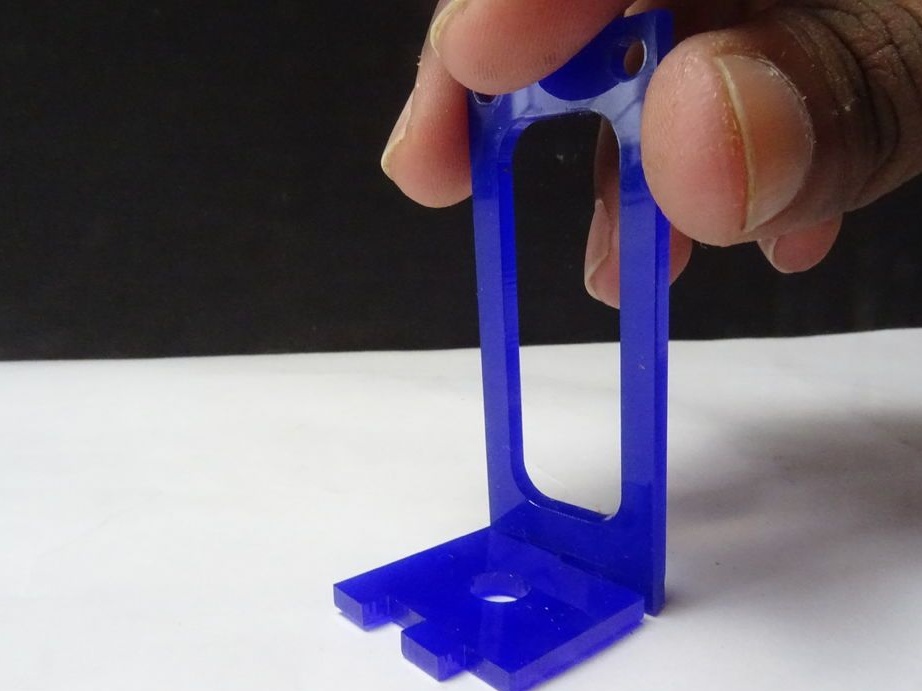

Wkręca łącznik.


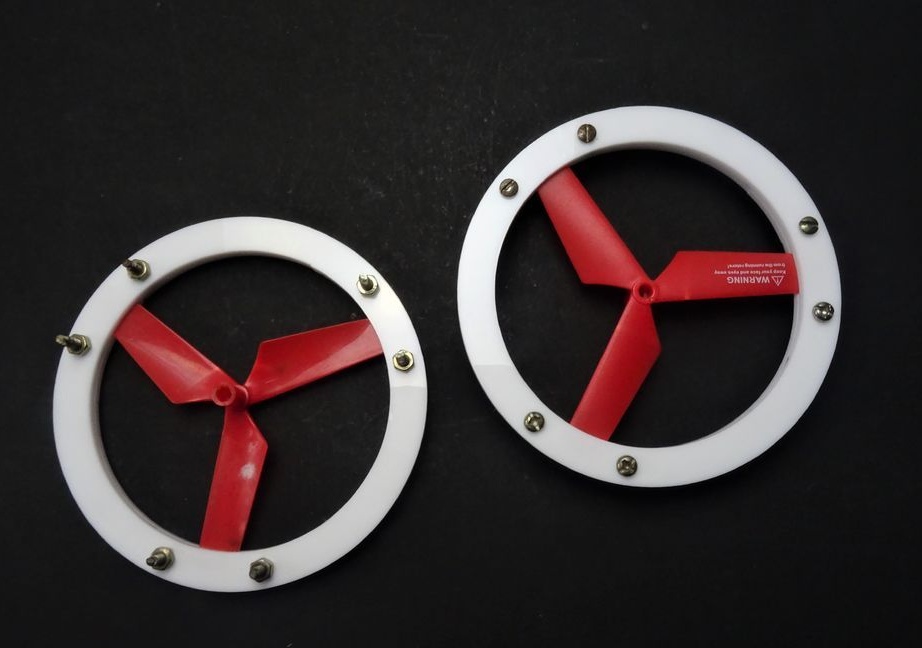
Krok dziesiąty: Malowanie
Ponieważ mistrz nie miał białego akrylu o wymaganej grubości, koła i obręcz zostały wycięte z przezroczystego akrylu, a następnie pomalowane na biało.




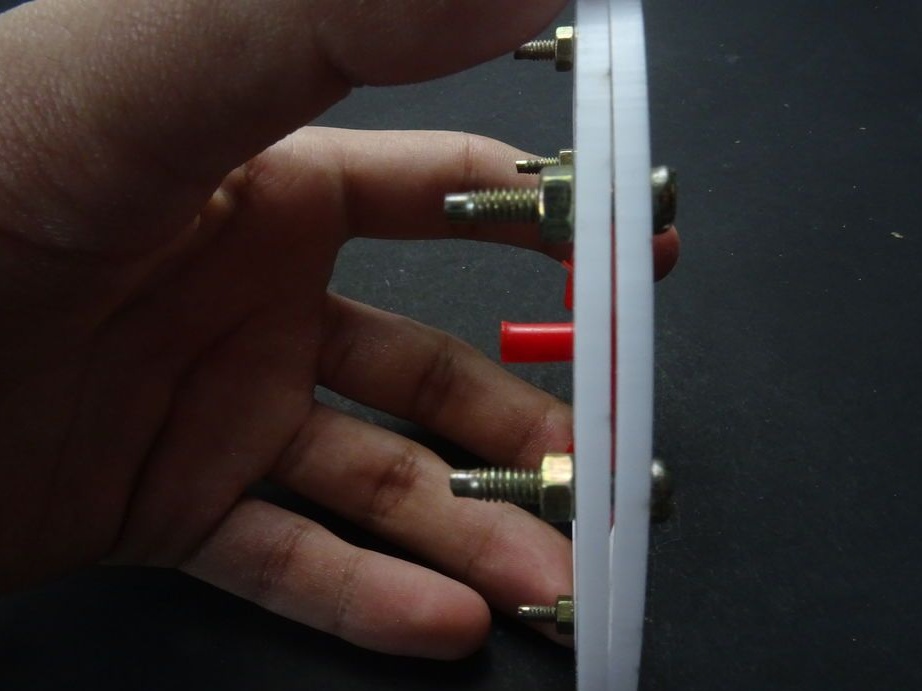
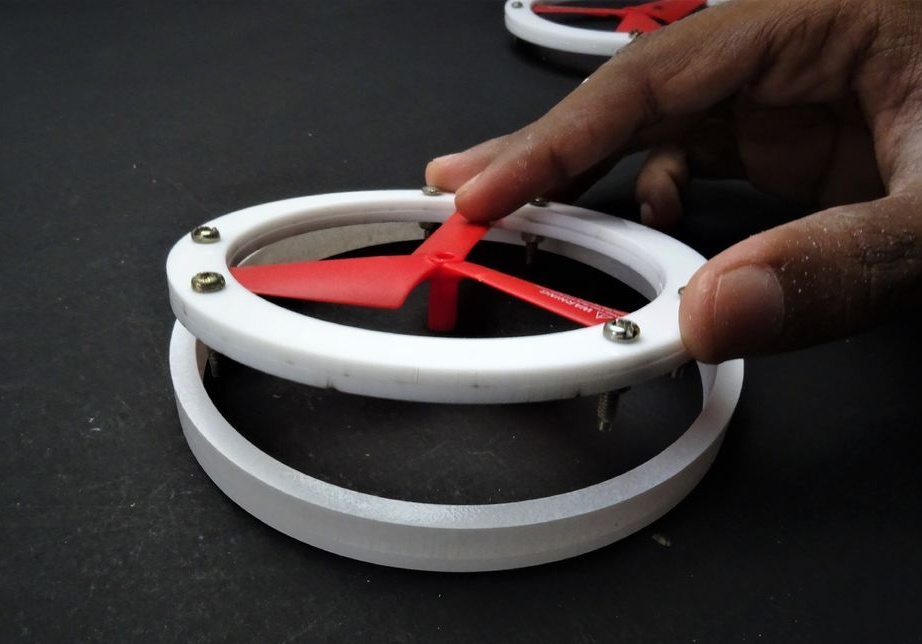
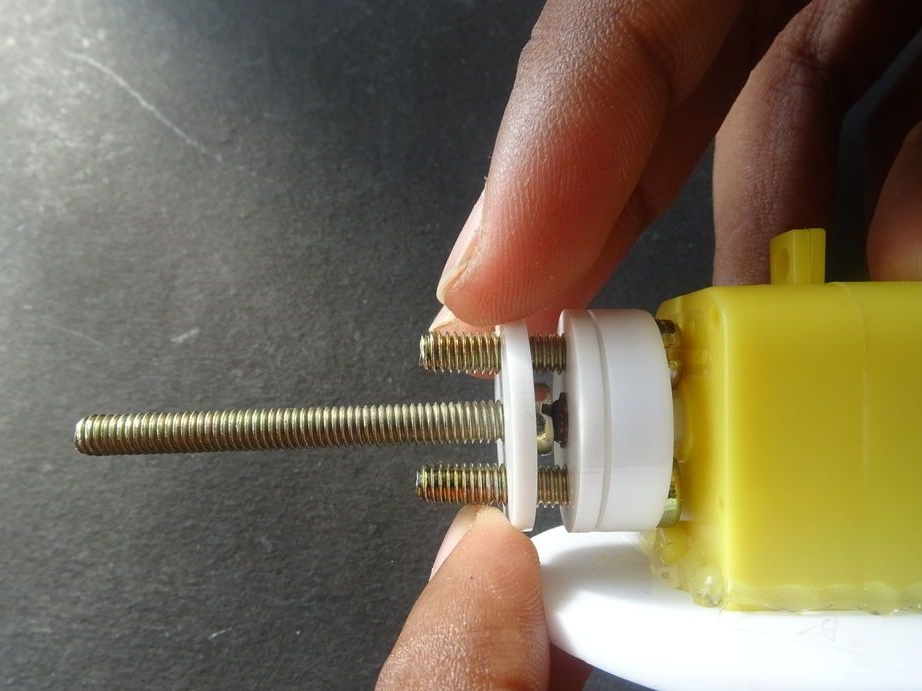
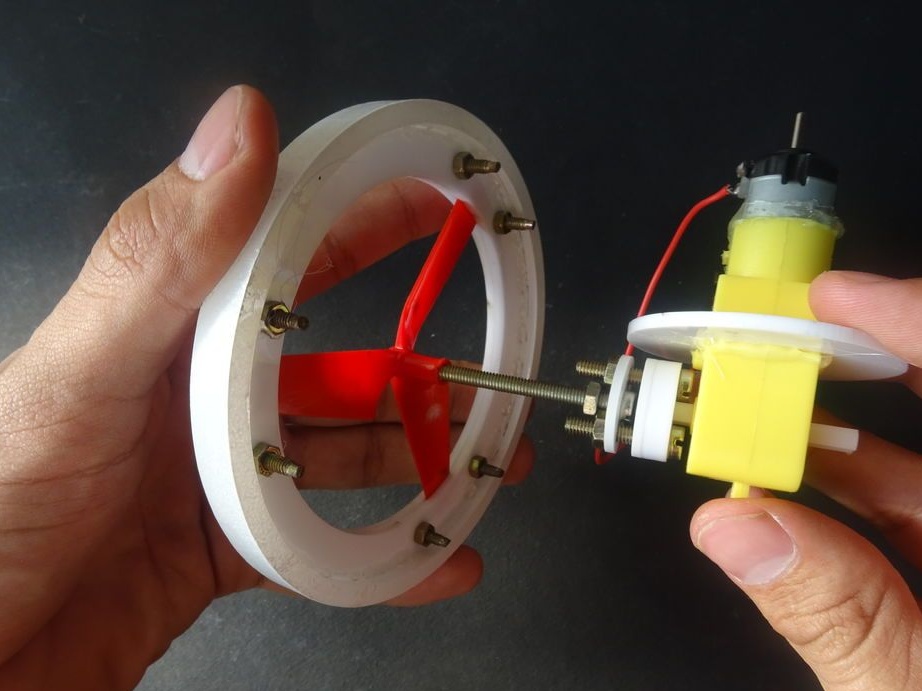
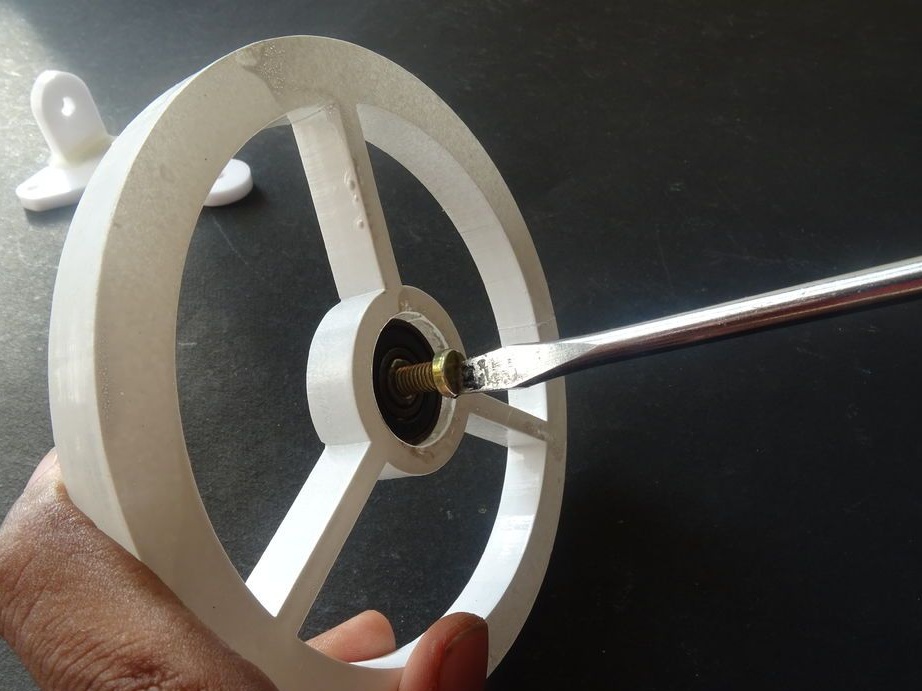
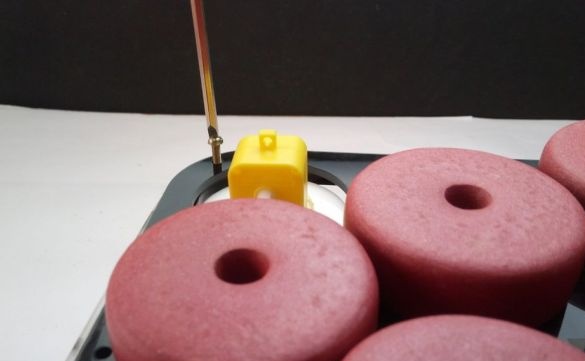
Krok jedenasty: Montaż koła
Na śruby zbiera dwie felgi. Śruby nie są całkowicie dokręcone.




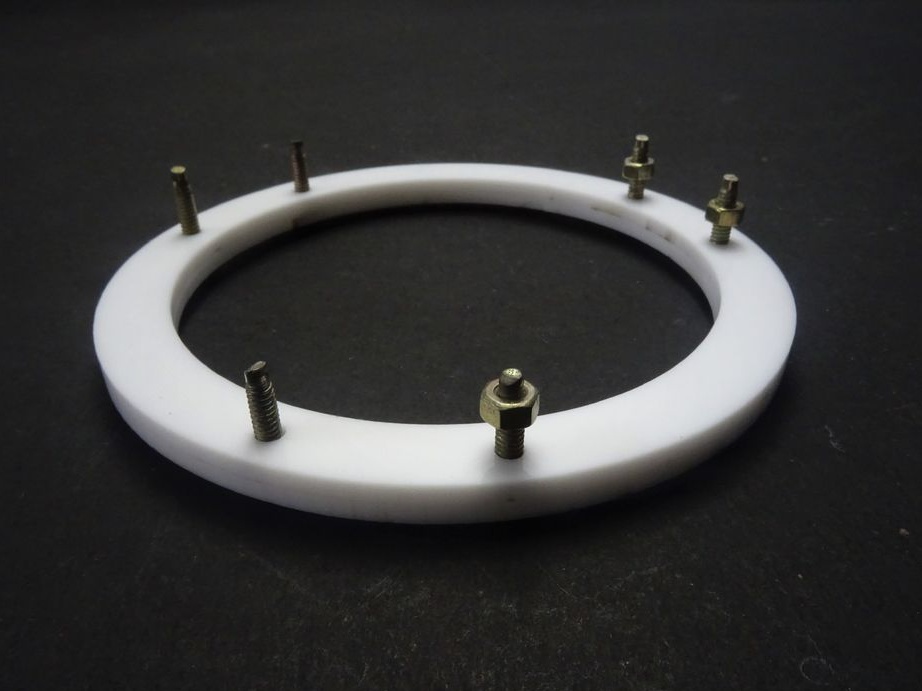
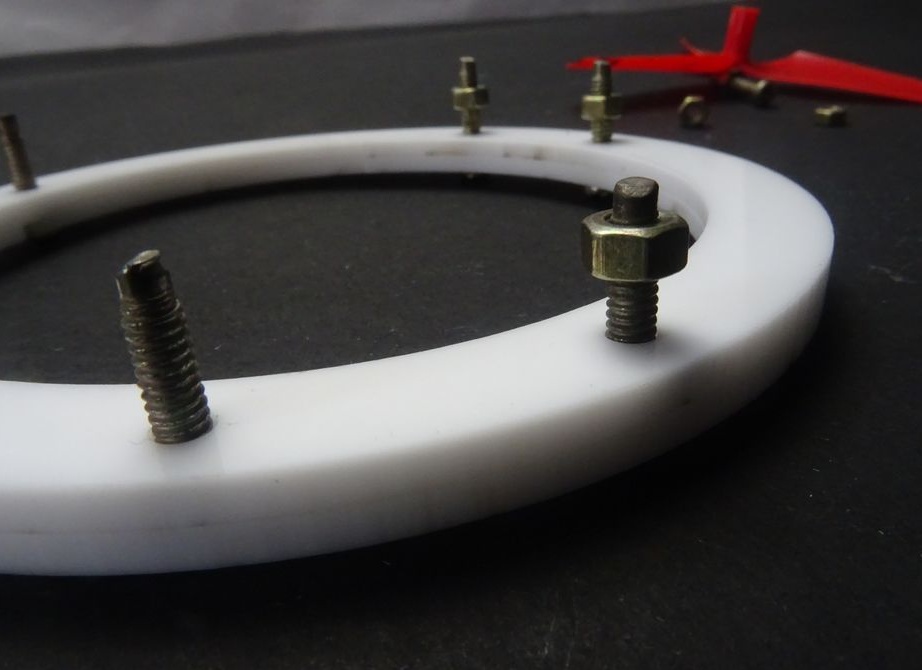
Pomiędzy dyskami instaluje śruby i dokręca śruby. Podczas instalowania śruby należy użyć szablonu, aby ją wyśrodkować.
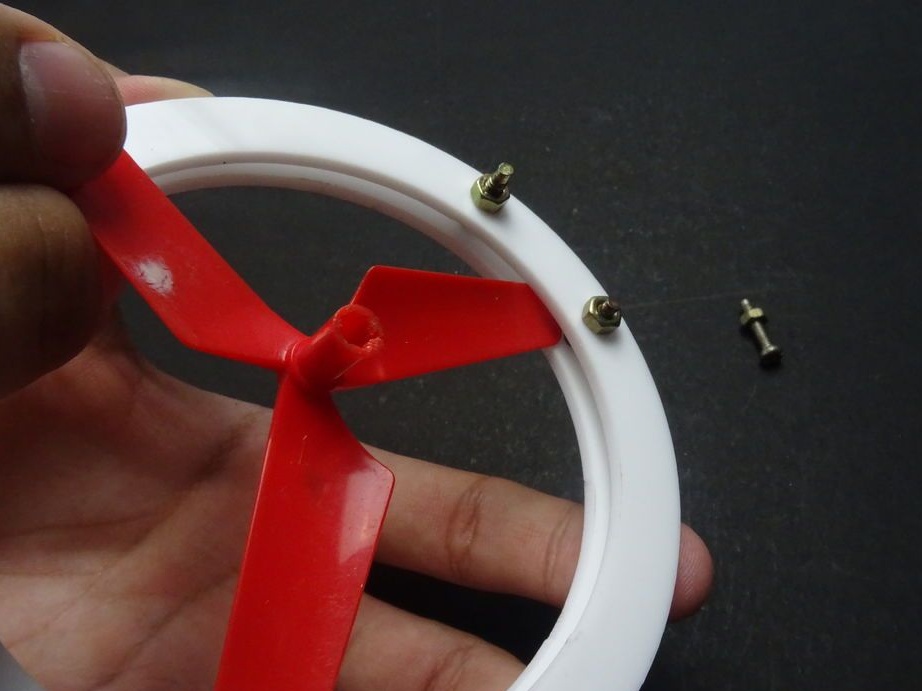
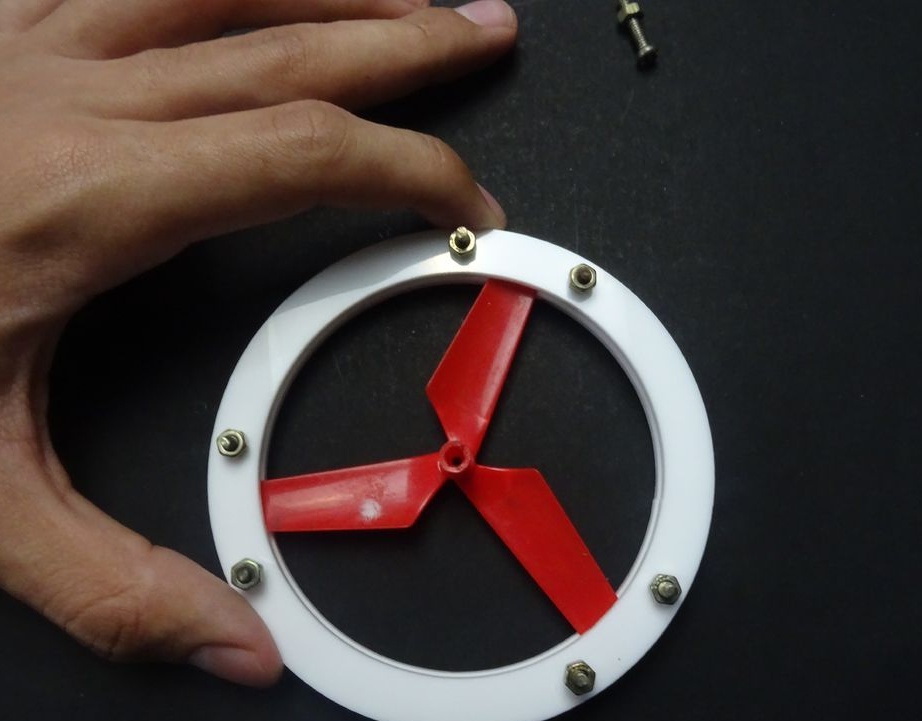

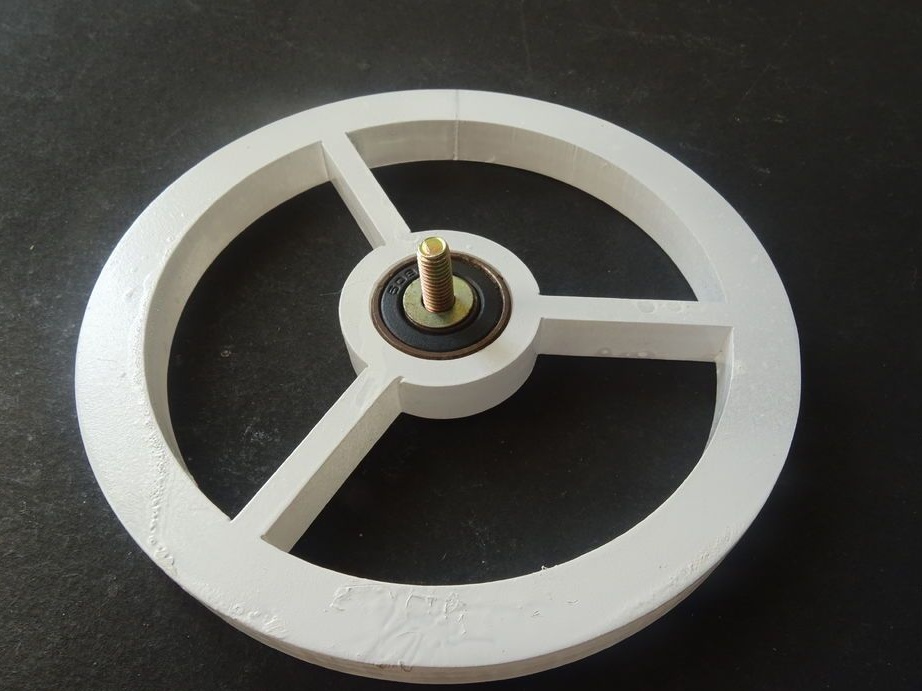
Ustawia zewnętrzną obręcz koła. Obręcz musi znajdować się na równi z wewnętrznym dyskiem.
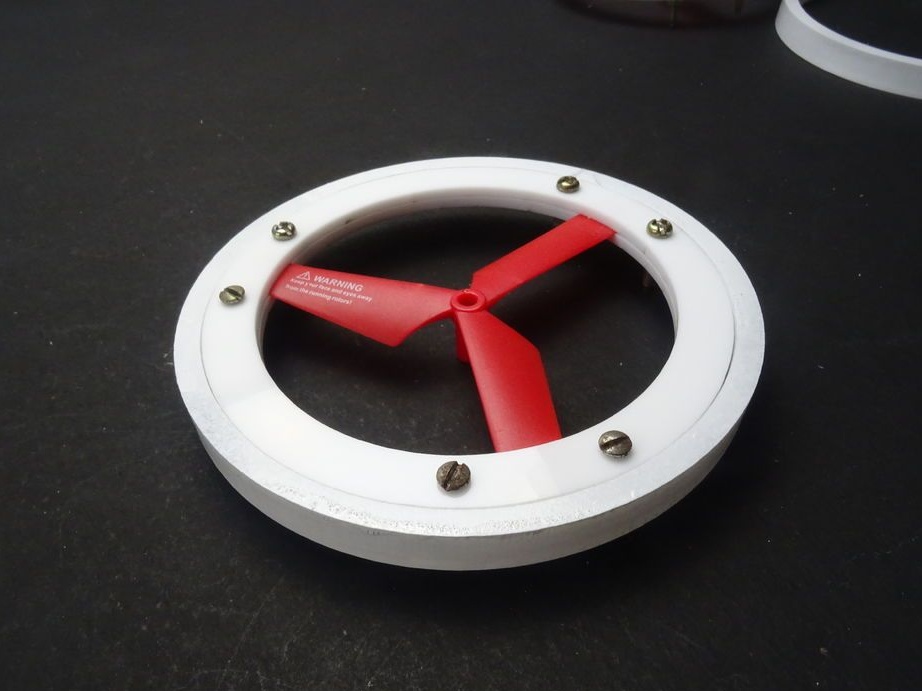

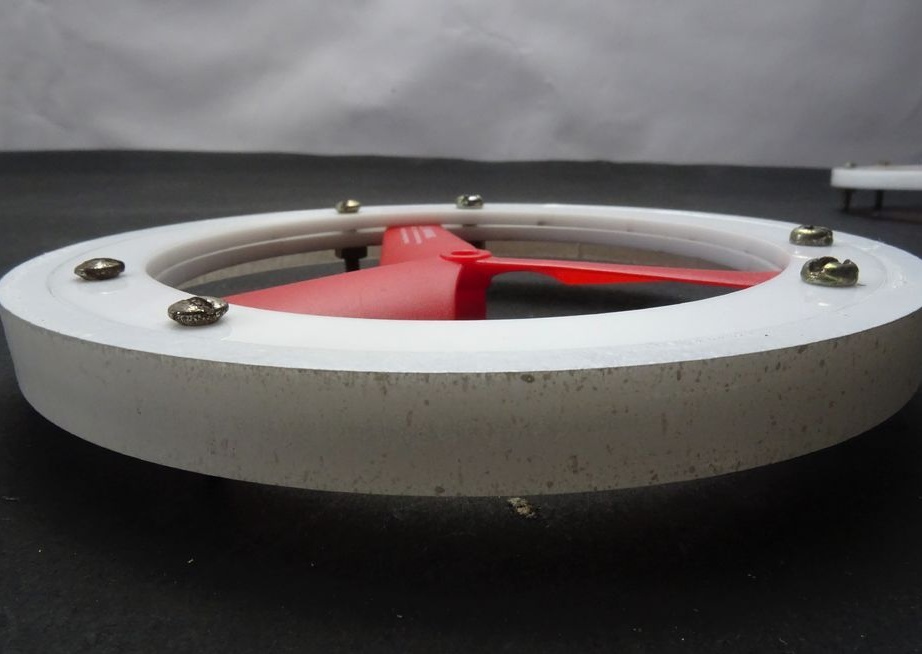

Nałóż gorący klej na złącze.


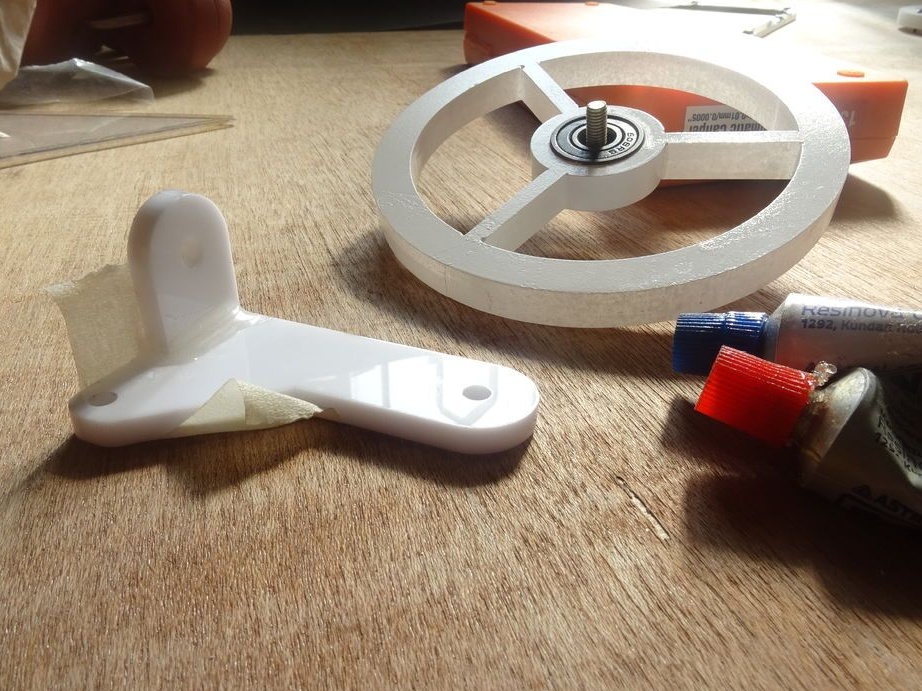
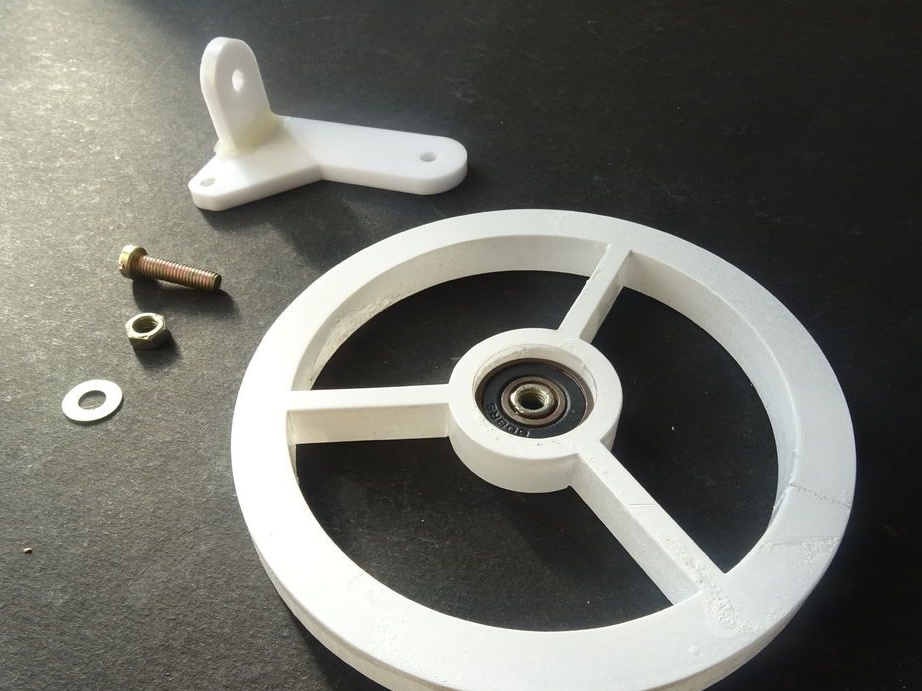
Teraz zbiera przednie koła.
Nakrętka odpowiedniej wielkości zatyka się w wewnętrznym bieżni łożyska. Naciska łożyska na przednie koła.
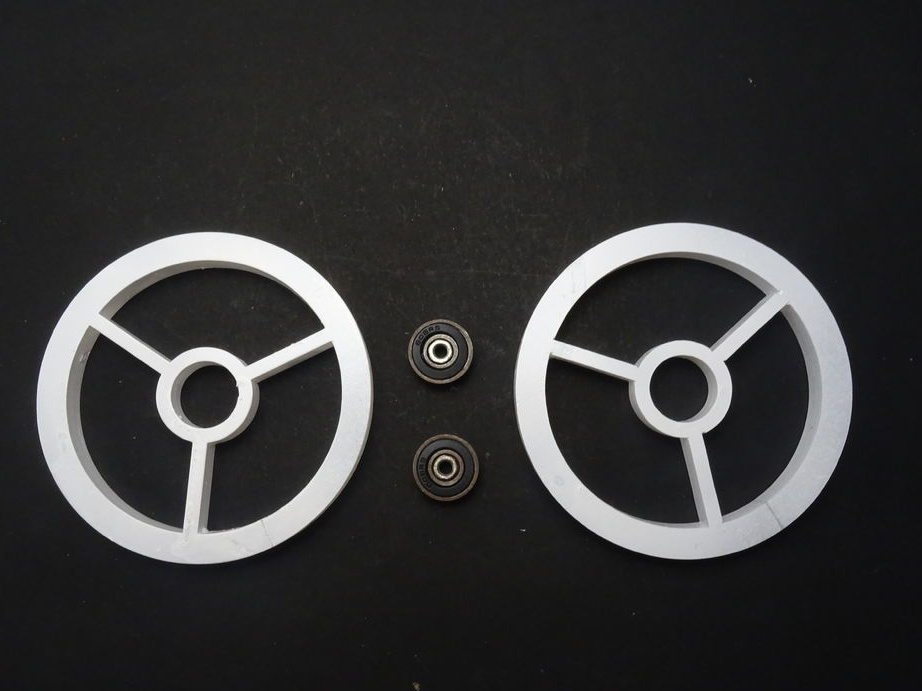



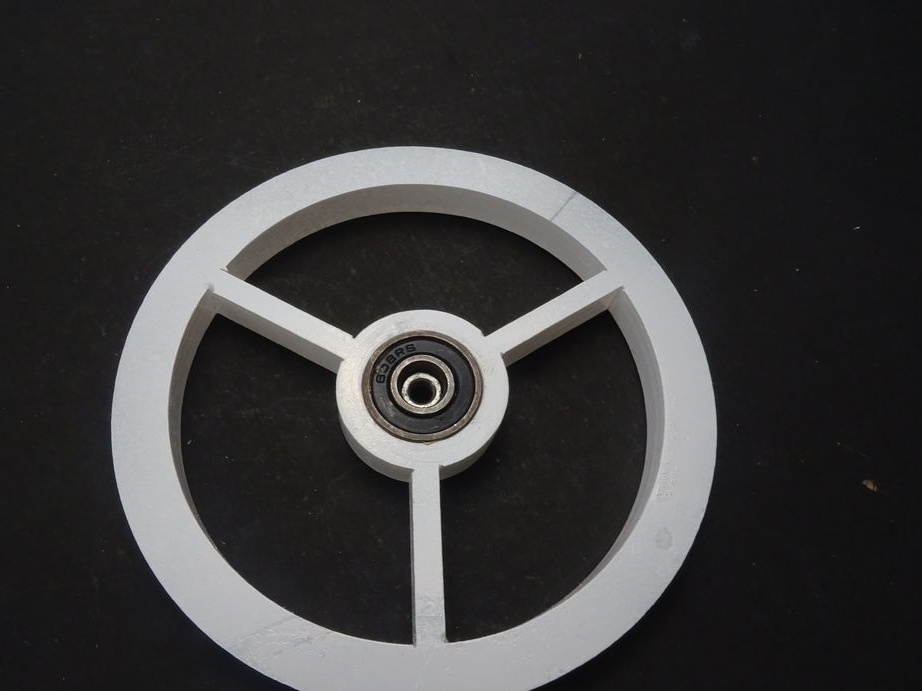
Koła są gotowe.

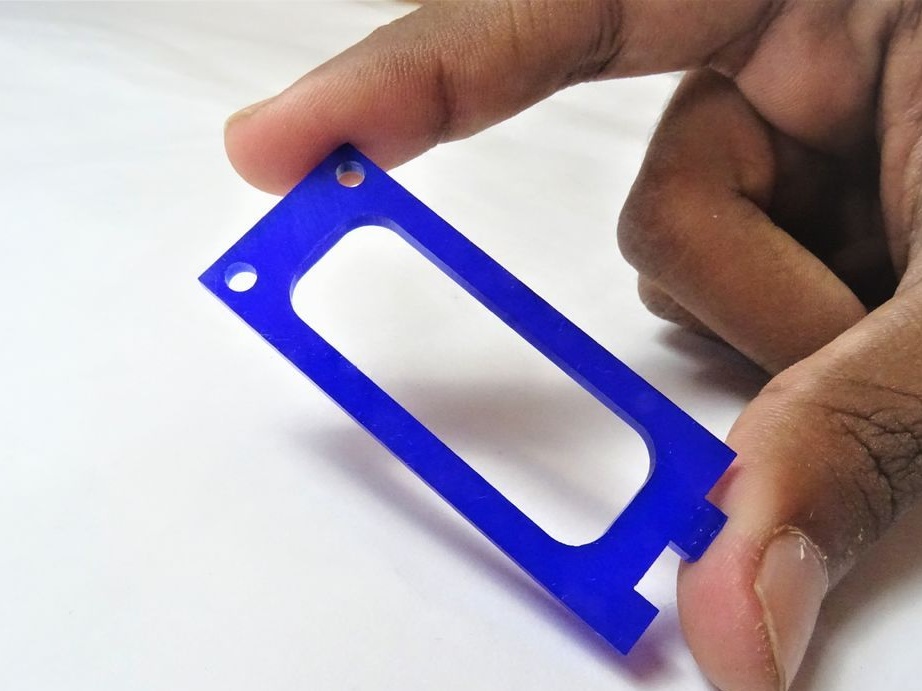
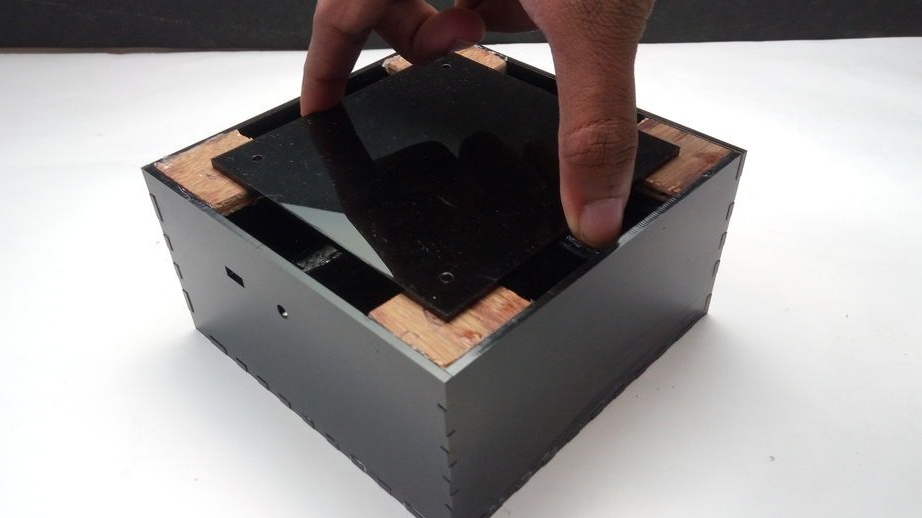
Krok dwunasty: Obudowa elektroniki
Przykleja obudowę elektroniki.

To pudełko będzie zawierało wszystko elektroniczny elementy, co oznacza, że musi być jak najbardziej szczelny.


Cztery kwadraty są wycinane i przyklejane z płyty w rogach pudełka. Pokrywa pudełka zostanie do nich przymocowana.



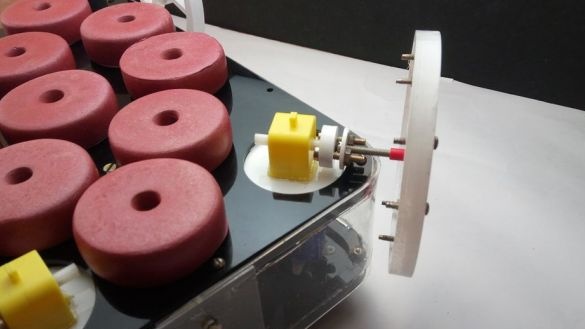
Krok trzynasty: Montaż koła
Teraz musisz połączyć koła i przekładnię za pomocą sprzęgła.





Przykręca przednie koła do przyczepności.


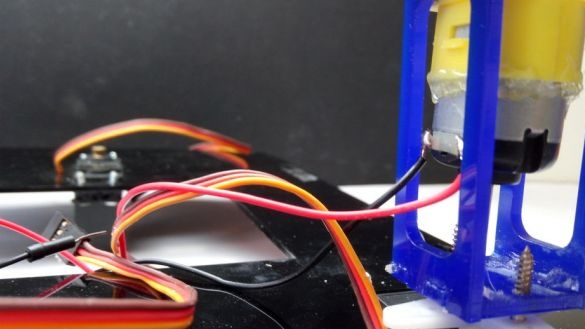
Krok czternasty: Podłącz elektronikę
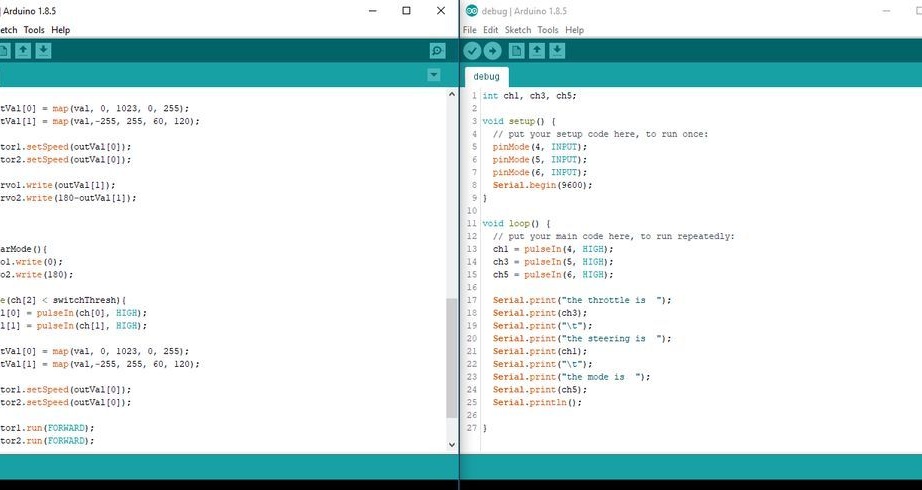
Zgodnie ze schematem instaluje części elektryczne.
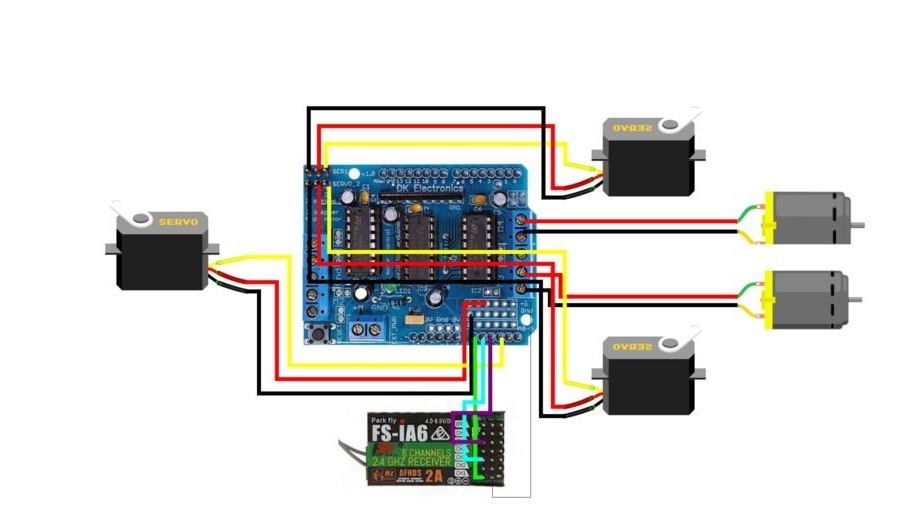

Przewody lewego silnika do M1, prawo do M2. Łączy sterownik silnika. Łączy serwomechanizmy. Instaluje odbiornik: gnd odbiornika na gnd Arduino; Odbiornik +5 V do +5 V Arduino; pin 3 do A0; pin 1 do A1; pin 5 do A2. Łączy baterię.
Krok piętnasty: pobierz kod
Najpierw musisz pobrać biblioteka.
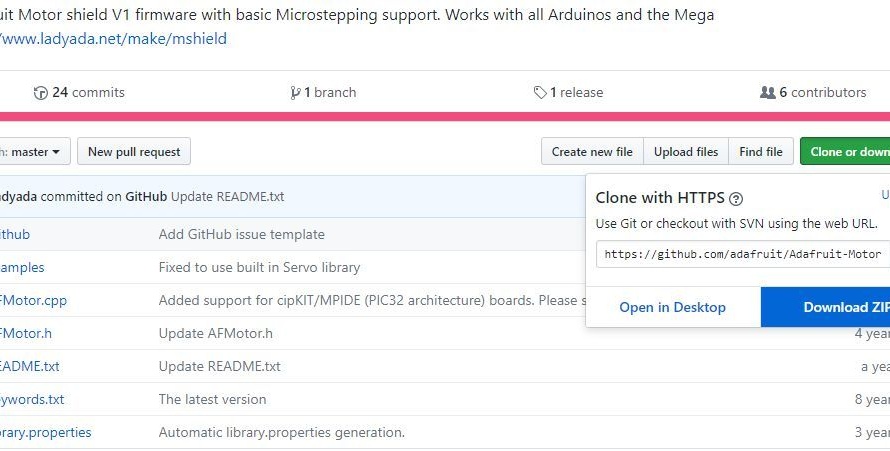
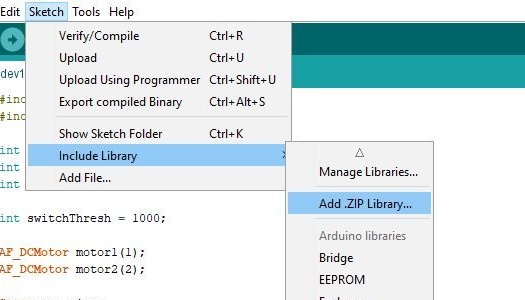
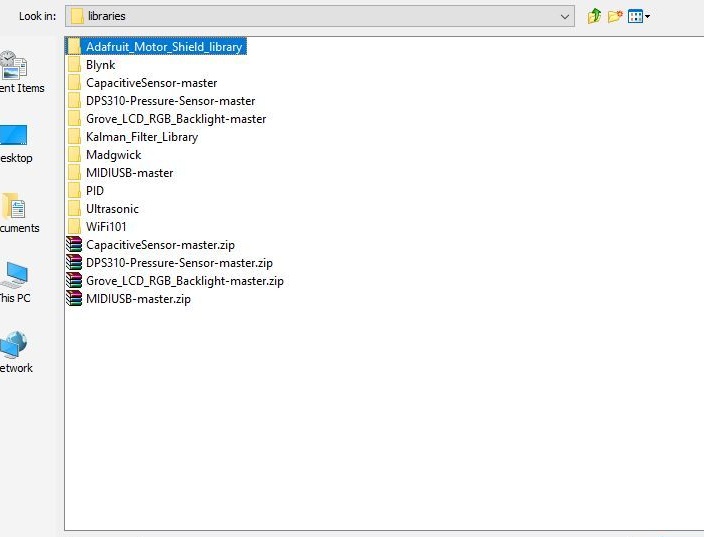
Następnie pobierz kod. Podczas ładowania akumulator należy odłączyć.
Pobierz kod poniżej.
amphibious_rover_code.ino
Po pobraniu kodu sprawdza działanie silników i napędów.
Krok szesnasty: montaż
Teraz nadszedł czas na montaż pojazdu terenowego.
[centrum[/ centrum]
Instaluje serwa. Instaluje motoreduktory.

Zapina koła. Skręca obie połówki ciała.






Wszystko jest gotowe i teraz możesz przetestować.