Podczas edukacji autor grał w gry ze wsparciem akcelerometru na swoim telefonie. Bardzo lubił prowadzić samochód przez telefon, przechylając go, a potem zaczął marzyć o stworzeniu samochodu o takiej samej kontroli w prawdziwym życiu. Teraz mając Arduino a po nabyciu umiejętności programowania nadszedł czas, aby stworzyć zarządzaną maszynę na Androida, którą nazwał Hercules.
Otrzymała to imię z powodu ogromnego momentu obrotowego i dużej prędkości. Model może być sterowany za pomocą telefonu z Androidem przez Bluetooth. Każdy telefon z tym systemem operacyjnym nadaje się do sterowania, autor nie ogranicza jednego pilota. Ponadto korzystanie z telefonu pozwoliło zaoszczędzić pieniądze, ponieważ nie musiałem wydawać pieniędzy na stworzenie pilota.
Materiały i narzędzia:
- Arduino Uno
- Nadajnik-odbiornik Bluetooth
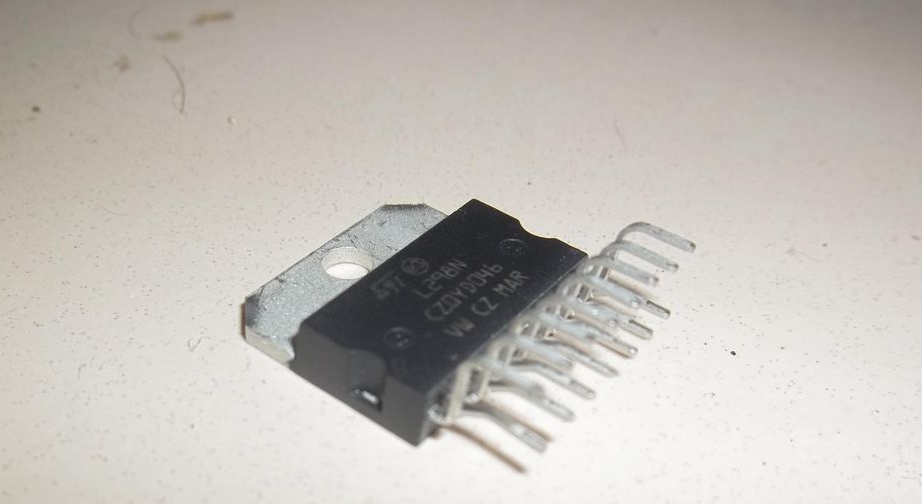
- Sterownik z dwoma silnikami (z mostkiem H L298)
- Silniki z przekładniami 4 szt. (Moc dobierana jest w zależności od zastosowania maszyny)
- Koła 4 szt
- Akumulator 1Ah SLA 12V
- Podstawa do komponentów (podwozia)
- deska do krojenia chleba
- Pudełka na obudowę 4 szt
- Przełącznik SPST
- Podłączanie przewodów do Arduino
- Druty lutownicze
- Nakrętki i śruby małego rozmiaru
- Rezystor 10 kOhm 1 szt
- Rezystor 20 kOhm 1 szt
- telefon z Androidem
- lutownica
- lutowane
- pasta lutownicza
- wiertarka





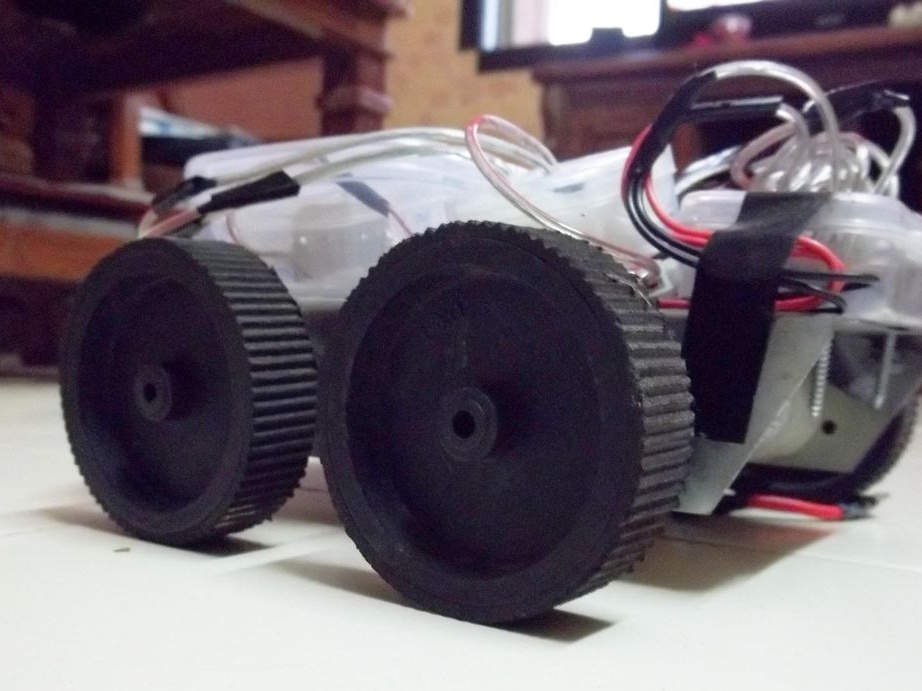
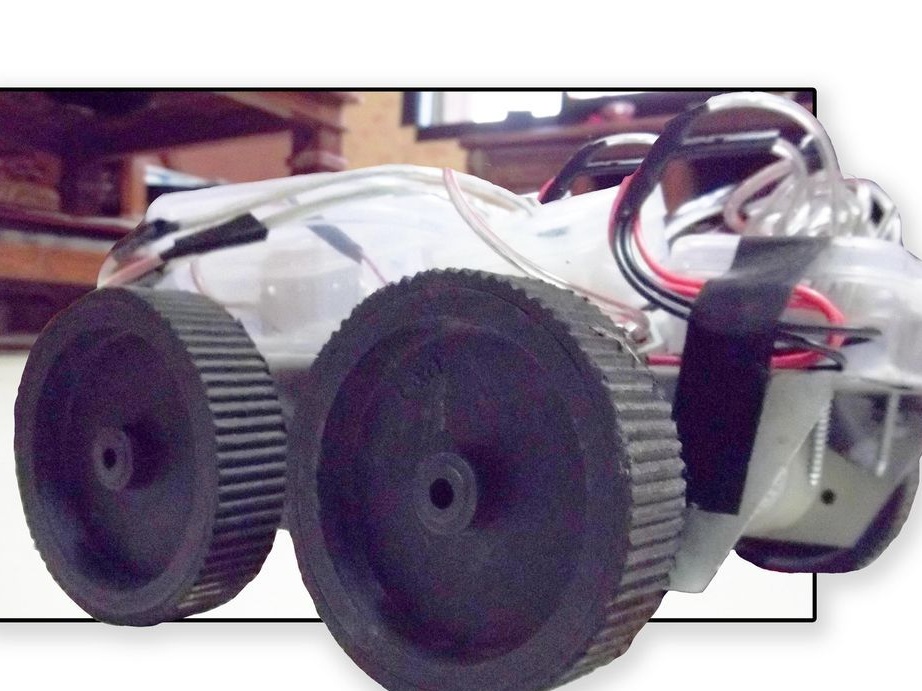
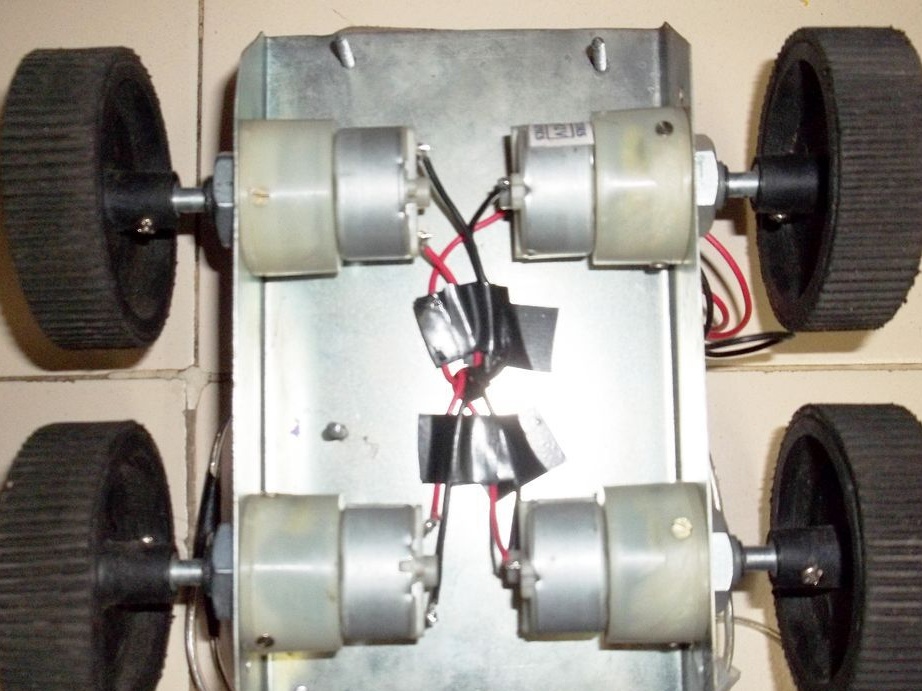
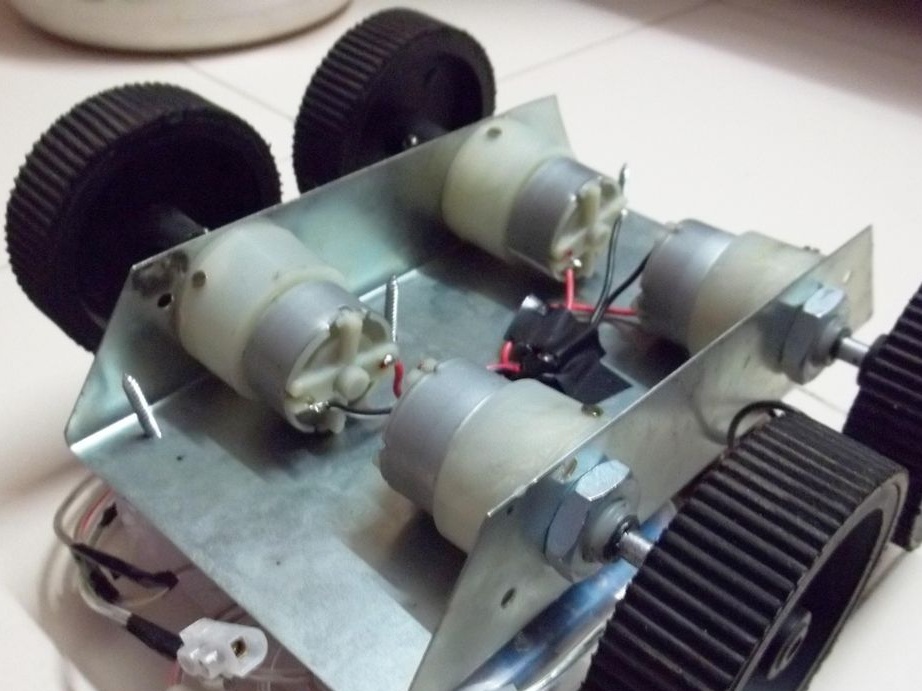
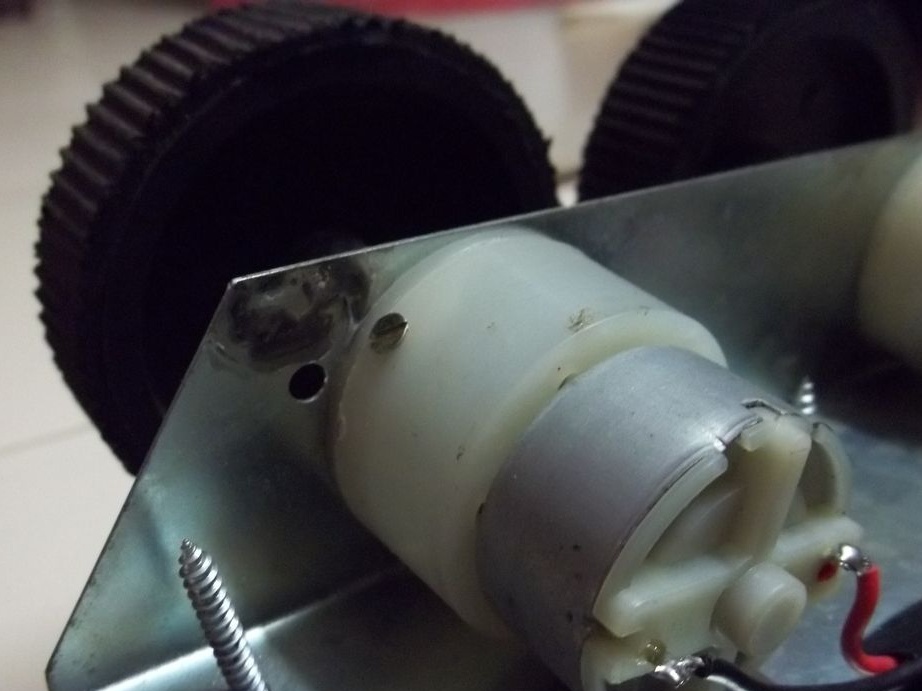
Pierwszy krok Koła i podwozie.
Śruby silnika ułatwiają montaż ich na podwoziu za pomocą nakrętek. Koła są zamontowane aż do wału silnika. Dwa prawe silniki są włączone równolegle ze sobą, a także dwa lewe. Jak wygląda podwozie po zamontowaniu czterech kół i silników, widać na poniższym zdjęciu.
Krok drugi Obudowa dla Arduino.
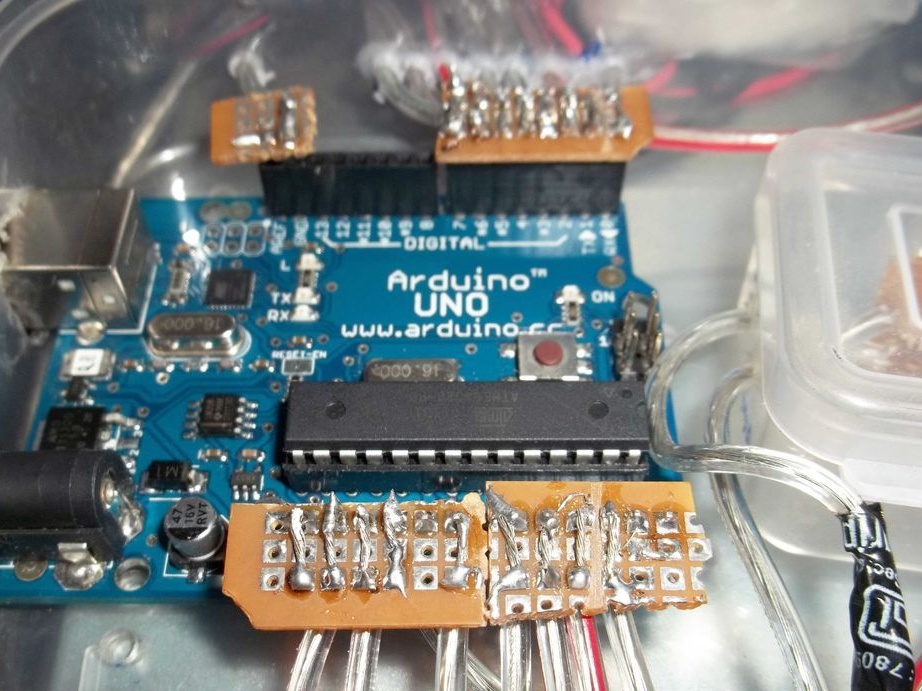
Schemat przypadku Arduino jest podzielony na kilka części. Takie modułowe rozwiązanie konstrukcyjne pomoże w przyszłości wesprzeć obwód lub wyeliminować możliwą awarię. Jeśli jeden z elementów ulegnie awarii lub przepali się, można go szybko wymienić i bez zepsucia projektu. Pudełko dla Arduino zostało utworzone w następujący sposób:
- Z płyty tartej wycięto cztery części, dwie z otworami o wymiarach 8x3, drugie dwie części 6x3.
- Piny BLS zostały przylutowane do każdej płytki na długim boku.
- Każdy bolec na płycie chlebowej został dodatkowo przylutowany drutami o długości około 10 cm, aby nie zsunąć drutów z Arduino, ponieważ teraz ładunek zaczął rozkładać się równomiernie.
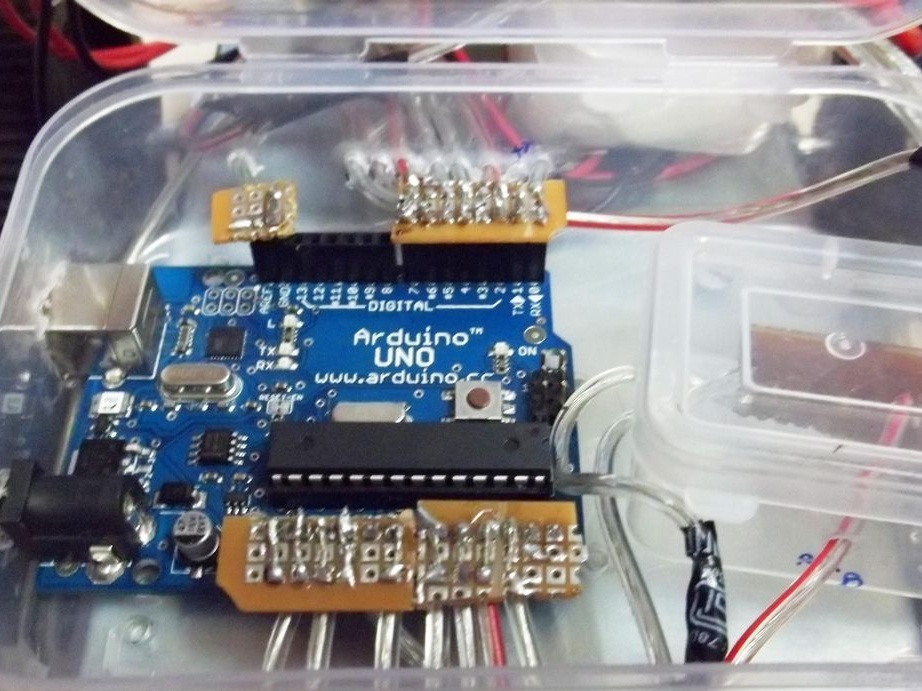
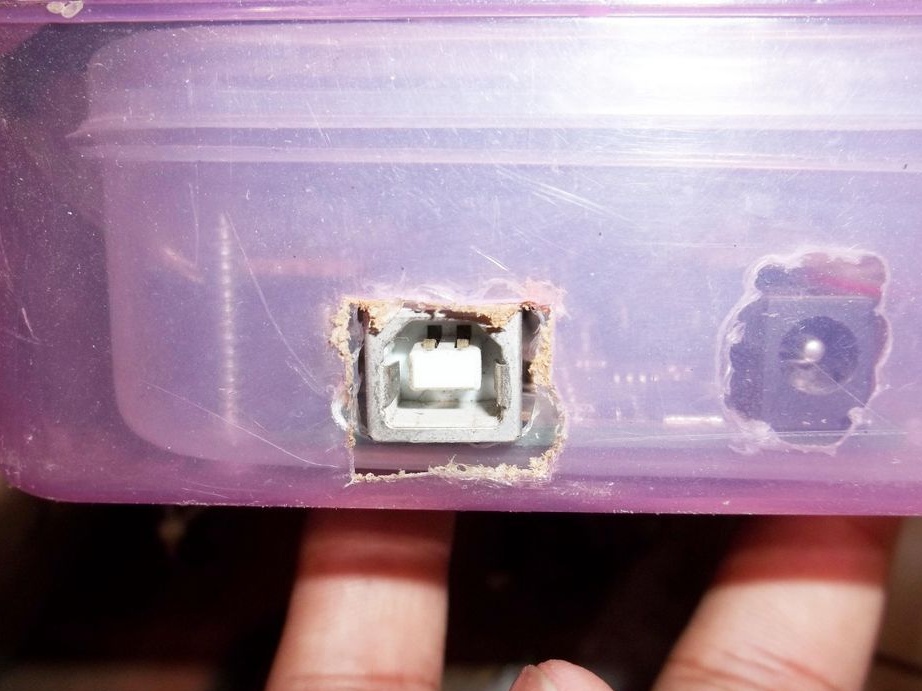
- Następnie płytę Arduino umieszczono w obudowie, tak aby wyjście USB dotknęło ściany. Dla tego wyjścia został wycięty otwór, który pomoże załadować dodatkowe programy do maszyny lub wprowadzić poprawki do już istniejących. Po bokach skrzynki wycięto otwory na druty, które wychodziły z płyty. Dodatkowe otwory zostały wycięte w dolnej części skrzynki, pod złączami montażowymi Arduino.


Krok trzeci Nadajnik-odbiornik Bluetooth.
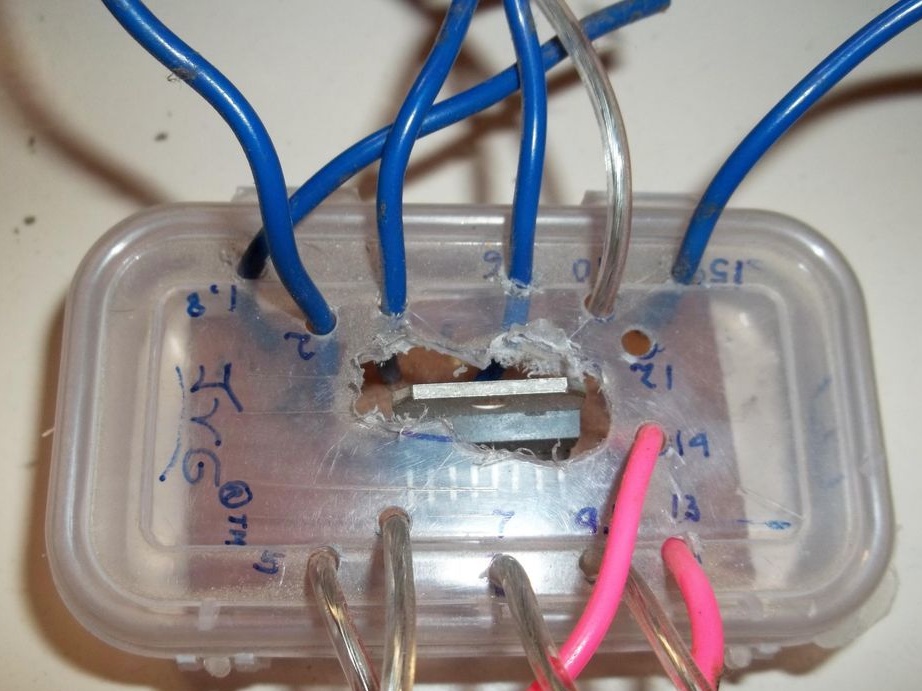
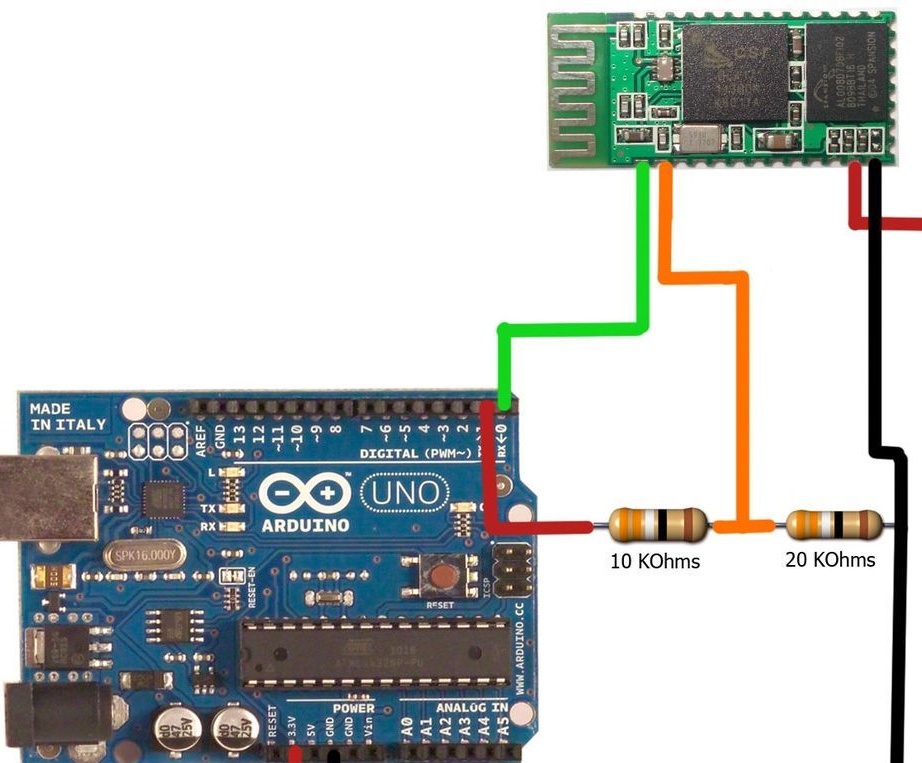
Lutowanie przewodów do nadajnika-odbiornika Bluetooth jest najtrudniejszym zadaniem w montażu tego projektu, autorowi naprawdę brakowało trzeciej ręki podczas lutowania. Zastosowano cztery przewodniki o długości 10 cm; zostały one przylutowane do pinów 1 (Tx), 2 (Rx), 12 (+ 3.3B) i 13 (GND). Teraz nadajnik-odbiornik może być umieszczony w obudowie z wcześniej przygotowanymi otworami na przewody. Autor przykleił przewody do skrzynki, aby zapobiec oderwaniu przewodów od styków.



Czwarty krok. Obudowa rezystorów.
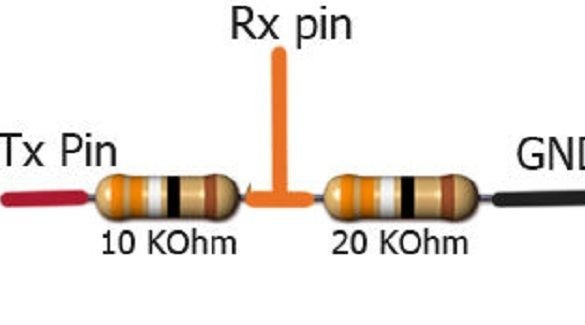
Ze względu na fakt, że wyjście Arduino Tx wysyła sygnał o napięciu 5 V, a moduł Bluetooth pracuje z napięciem 3,3 V, konieczne było przekształcenie 5 V na 3,3 V. Do tego zadania autor zastosował dzielnik napięcia. Zgodnie z obwodem podanym poniżej przylutował rezystor do pozostałej części płyty chlebowej. Oczywiście można było umieścić ten obwód w obudowie Arduino, ale nie było wystarczającej ilości miejsca, więc autor stworzył osobny dla oporników.


Krok piąty Sterownik silnika.
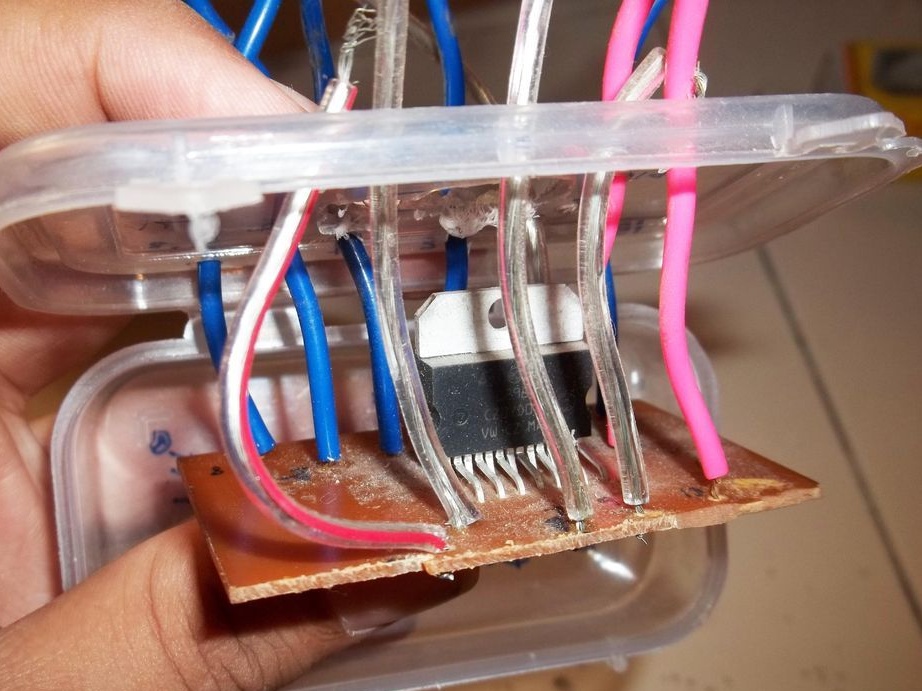
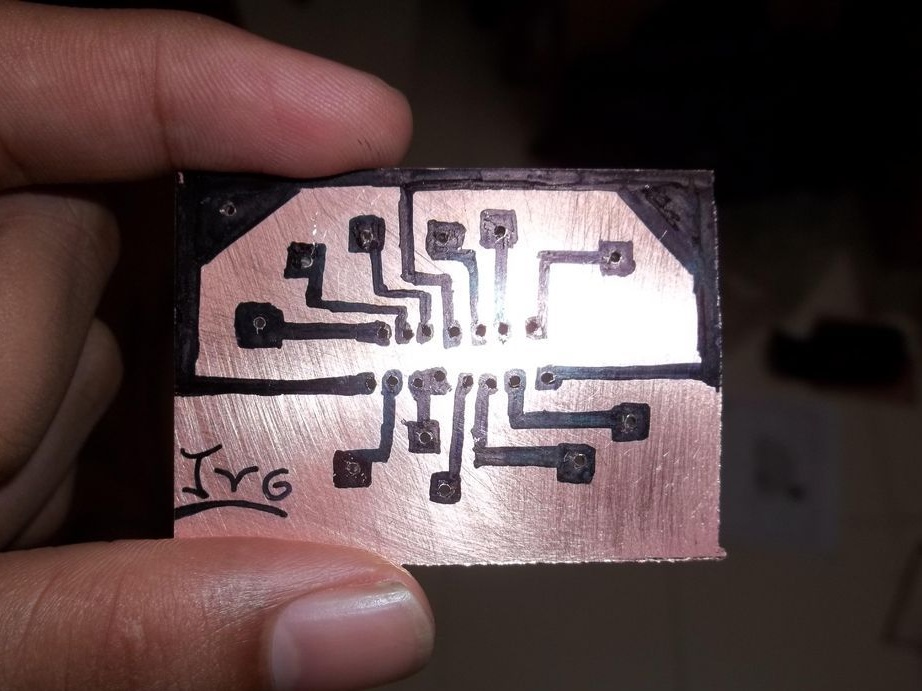
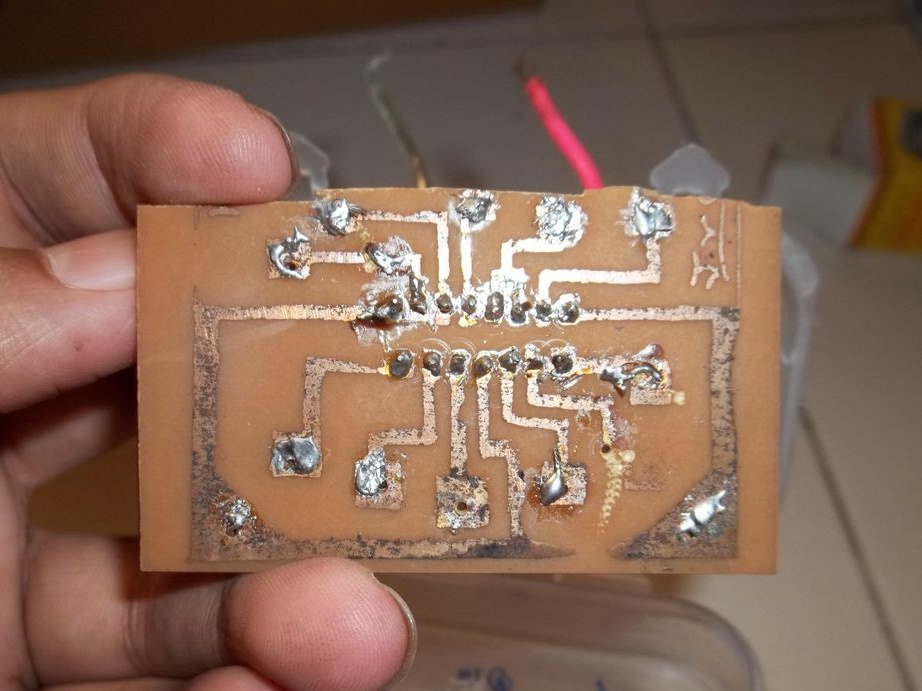
Autor używa podwójnego sterownika z mostkiem H L298 IC, kontroluje cztery silniki. Dla niego autor stworzył płytkę, aby ułatwić mu lutowanie drutów, samą płytkę na zdjęciu poniżej. Po lutowaniu sterownik umieszczono również w osobnej obudowie z otworami na przewody.
Krok szósty Ostateczne zgromadzenie.
Każdy pojedynczy element jest podłączony do Arduino zgodnie ze schematem.
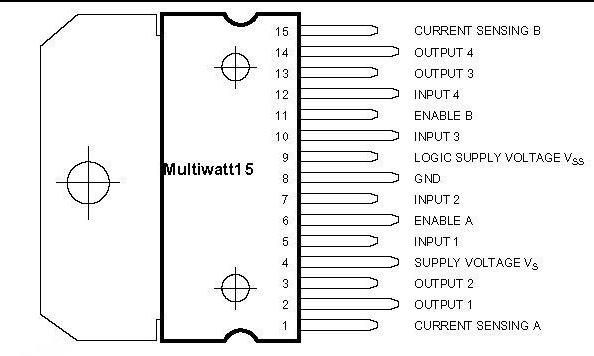
Połączenie sterownika silnika z Arduino odbyło się zgodnie z tym pinoutem:
1 do GND
2 do pierwszego kontaktu lewego silnika
3 do drugiego kontaktu lewego silnika
4 do akumulatora 12V
5 do przypięcia Arduino 2
6 do pinu Arduino 3
7 do przypięcia Arduino 4
8 do GND
9 do 5 V z Arduino
10 do przypięcia Arduino 5
11 do przypięcia Arduino 6
12 do pinu Arduino 7
13 do pierwszego kontaktu odpowiednich silników
14 do drugiego styku odpowiednich silników
15 do GND
Zasilanie 12 V zostało podłączone do pinu Vin Arduino i pinu 4 L298. GND Arduino odpowiednio do zasilacza GND.
Siódmy krok. Program dla Arduino.
Aby program działał poprawnie, konieczne było zainstalowanie biblioteki Amarino, którą można pobrać. Możesz pobrać kod źródłowy dla Arduino pod tym artykułem.
Krok ósmy. Oprogramowanie dla Androida
Biblioteka Amarino to zestaw narzędzi do pracy ze smartfonami z Androidem. Instalując dodatkową aplikację w telefonie, możesz zacząć pisać program.
Aplikację i wtyczkę Amarino można pobrać z. Po zainstalowaniu ich w telefonie pozostało tylko włączyć urządzenie i połączyć się z nim, a następnie wybrać sekcję Dodaj zdarzenia-> Czujnik przyspieszenia.
Wideo z instalacją Amarino i jego wtyczek:
Prędkość urządzenia jest równa nachyleniu telefonu. Jeśli maszyna porusza się w złym kierunku, musisz zamienić przewody z silników.