


Materiały i narzędzia do montażu:
- sterownik obrotowy;
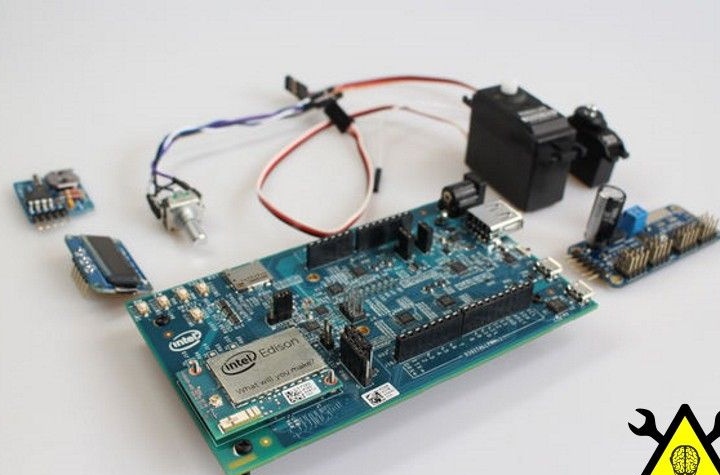
- Intel Edison z Arduino Breakout Board
- sterownik I2C PWM;
- wybicie zegara czasu rzeczywistego;
- mini I2C OLED;
- dwa serwa;
- Trzy serwa z metalowymi zębatkami;
- dwa przewody do serwonapędu o długości 30 cm;
- gniazdo montażowe do wtyczki;
- dwupozycyjny przełącznik dźwigniowy;
- pędzel i pasta do zębów;
- zasilacz do 5V 3A;
- plastikowa strzykawka;
- nakrętki i śruby;
- nakrętka i pręt gwintowany;
- kawałek przezroczystego akrylu o wymiarach 61 cm x 61 cm x 3 mm;
- sklejka o wymiarach 91 cm x 61 cm x 6 mm;
- drukarka 3D.
Proces montażu robota:
Pierwszy krok Część mechaniczna
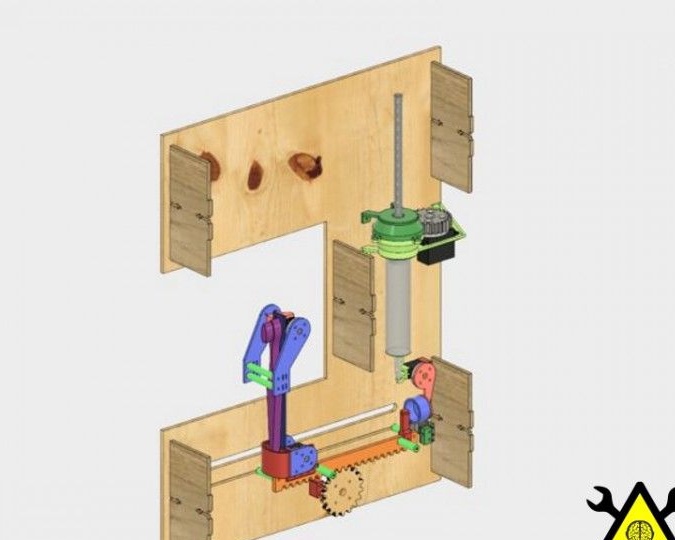
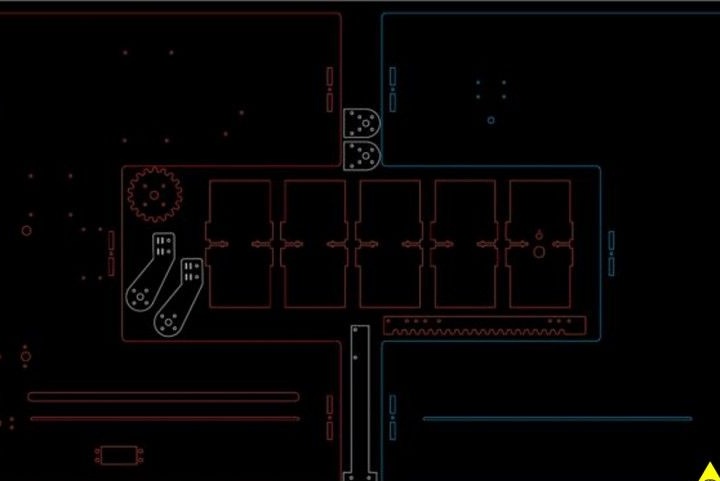
Urządzenie zostało po raz pierwszy modelowane przy użyciu kombinacji Fusion 360 i Illustratora. W trakcie procesu powstała cała technologia, która obejmuje drukowanie 3D, a także laserowe cięcie metalu. W sumie system można podzielić na cztery główne węzły. Obejmuje to wózek, uchwyt na szczoteczkę do zębów, korpus główny i dozownik.
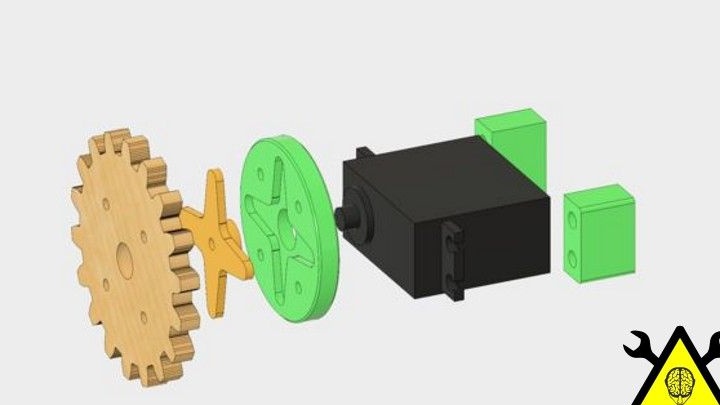
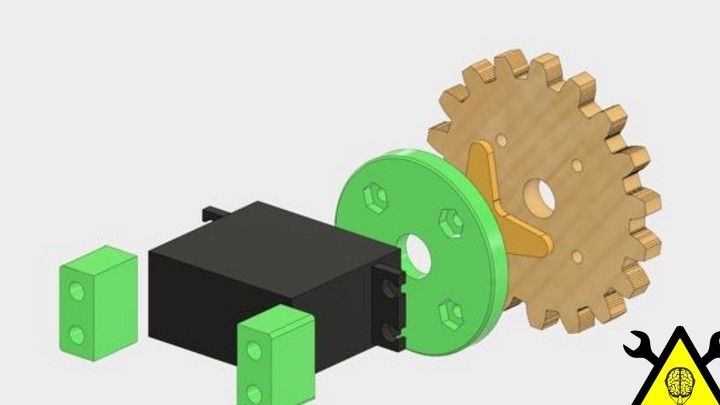
Aby produkty domowe mogły być wykorzystywane do szerszych potrzeb, postanowiono modelować adaptery do serwomechanizmów standardowych i mikro. Te adaptery mają gniazda do mocowania standardowych wałków, a także miejsce na cztery nakrętki z tyłu. Ze względu na to, że adaptery zostały zaprojektowane do wałów, muszą być przymocowane albo do płyt, albo do innych przedmiotów.

Krok drugi Obwód elektryczny urządzenia
Źródło 5 V i 3 A jest wykorzystywane jako źródło zasilania. To wystarczy, aby zasilić jeden silnik. Jeśli chodzi o płytę główną, zużywa około 500 mA, a napędy silnikowe, oryginalna dioda LED i zegar czasu rzeczywistego zużywają niewielką ilość prądu.
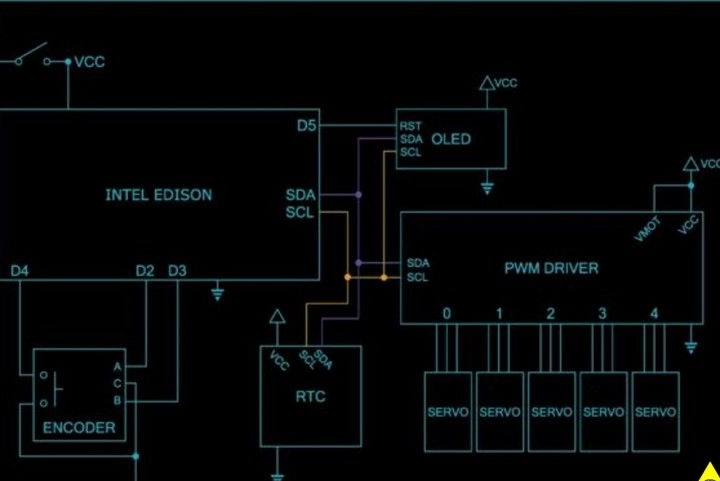
Procesor Intel Edison jest wykorzystywany jako główny kontroler systemu. Dzięki separacji płyt procesor może łatwo komunikować się z innymi elementami elektroniki. Płytka łączy się z silnikiem, zegarem i ekranem.
Do sterowania pięcioma serwomechanizmami używana jest płyta PWM. Moc silników można kontrolować za pomocą zewnętrznego źródła, ale autor postanowił powiązać Vmot z pinem VCC.Dzięki temu cały system zasilany jest napięciem 5 V.
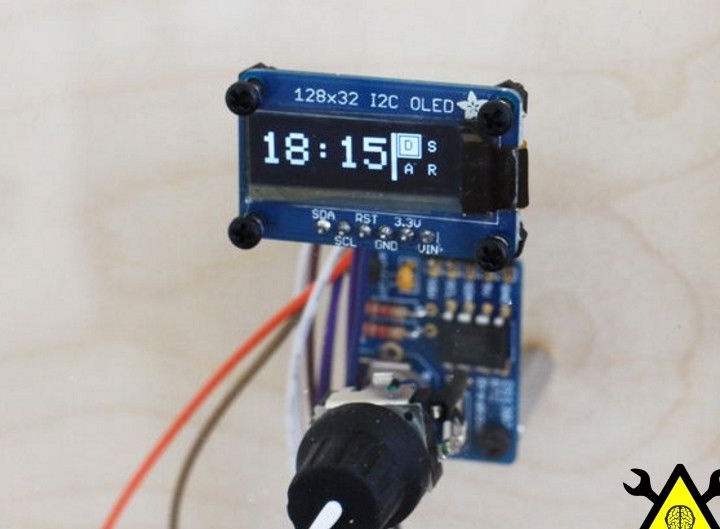
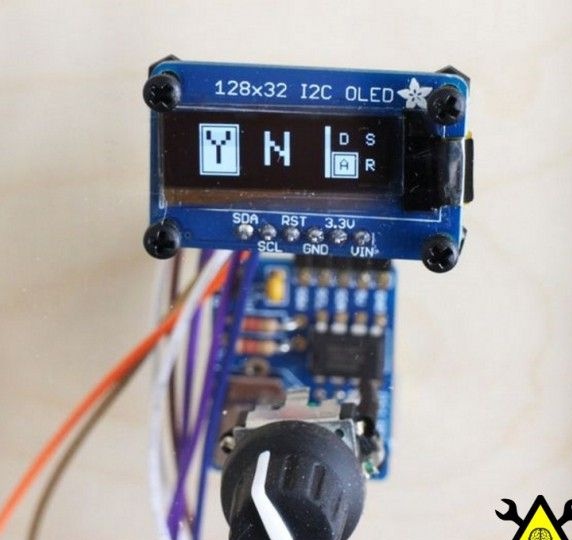
Aby sterować urządzeniem, zastosowano mały wyświetlacz o rozmiarze 128 x 32. Czujnik obrotowy działa jako główny sygnał wejściowy użytkownika. Wyjścia czujnika są podłączone do cyfrowych styków procesora.
Krok trzeci Montaż nadwozia
Tylna część stanowi podparcie walizki; jest wykonana ze sklejki o grubości 6 mm. Cztery śruby służą do zabezpieczenia PWM i procesora. Edison jest zamontowany z przodu, a PWM z tyłu.
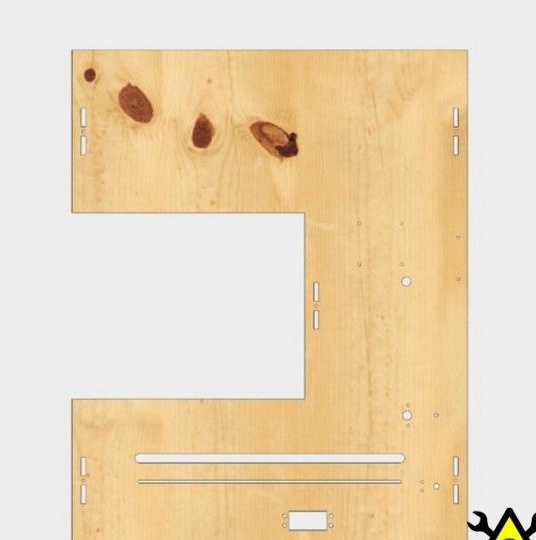
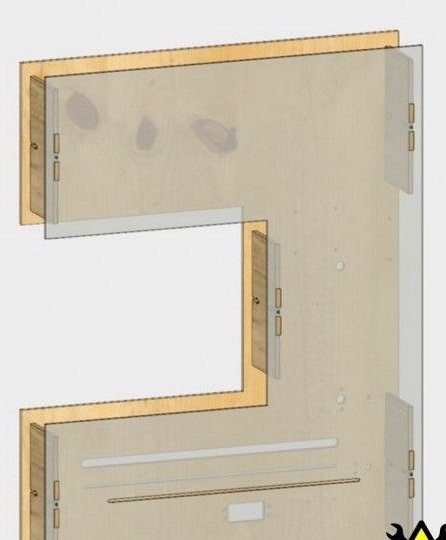
Pięć płyt dystansowych służy do łączenia przedniego i tylnego panelu. Przekładki są przymocowane do płyt za pomocą śrub i odpowiednich nakrętek. Płyty są prawie symetryczne, ale wypukłości na jednej krawędzi są krótsze, nie rozciągają się do przodu. Przełącznik wraz ze złączem zasilania jest przymocowany do dolnej kolumny.

Jeśli chodzi o panel przedni, jest on potrzebny głównie w celu ochrony urządzenia podczas pracy. Do zamocowania ekranu służą cztery śruby; czujnik obrotowy jest również przymocowany za pomocą nakrętek.
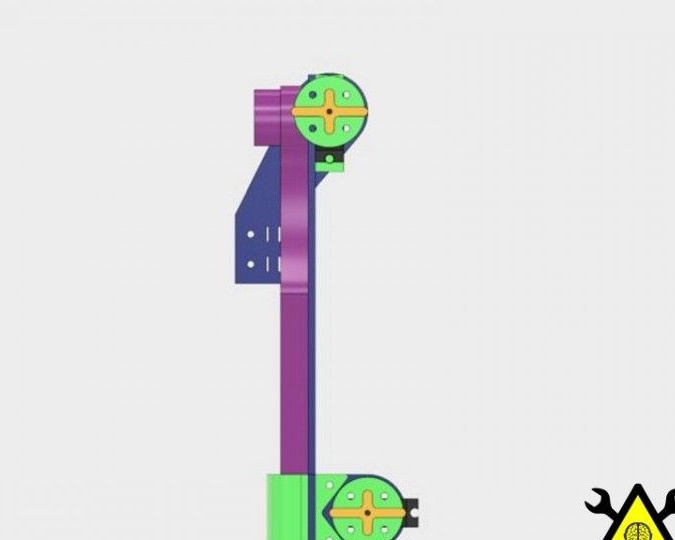
Krok czwarty Mocowanie szczoteczki do zębów
Na uchwycie szczoteczki znajdują się dwa serwomechanizmy napędzane przez komponenty - podstawę i „główkę”. Na zdjęciu widać elementy niebieskiego i zielonego. To, co zostało wycięte za pomocą wycinarki laserowej, ma kolor niebieski, a elementy, które są drukowane na drukarce 3D, mają kolor zielony.

Dzięki główce szczoteczka nie spada. Ręce są napędzane jednym serwonapędem, są mocowane za pomocą dwóch uszczelek. Adapter 3D i dwie śruby służą do przymocowania siłownika do płyty głównej. W płycie znajdują się cztery szczeliny, przez które za pomocą czarnych gumek przymocowana jest szczoteczka do zębów.
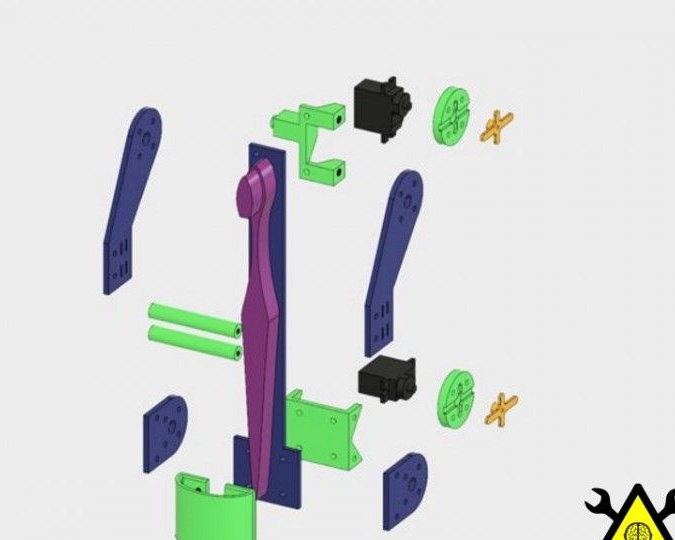
Podstawa to mały kubek 3D, który zapobiega spadaniu pędzla. Po załadowaniu szczoteczki do zestawu serwonapęd przytrzymuje ją i obniża. Osiem śrub służy do łączenia płyt.


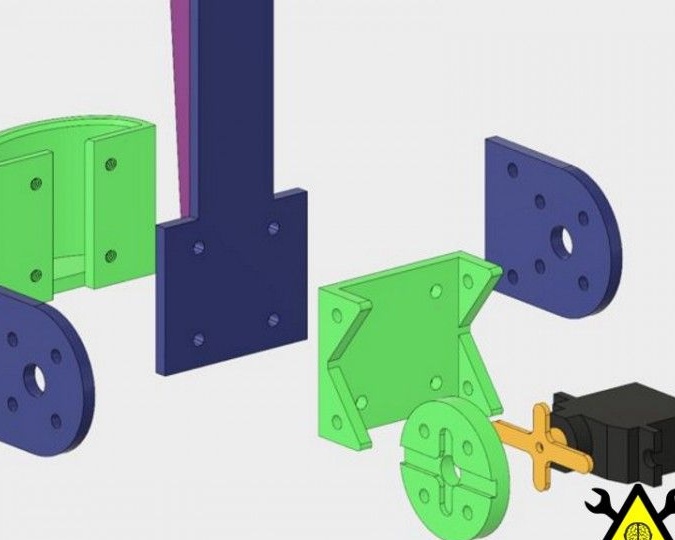
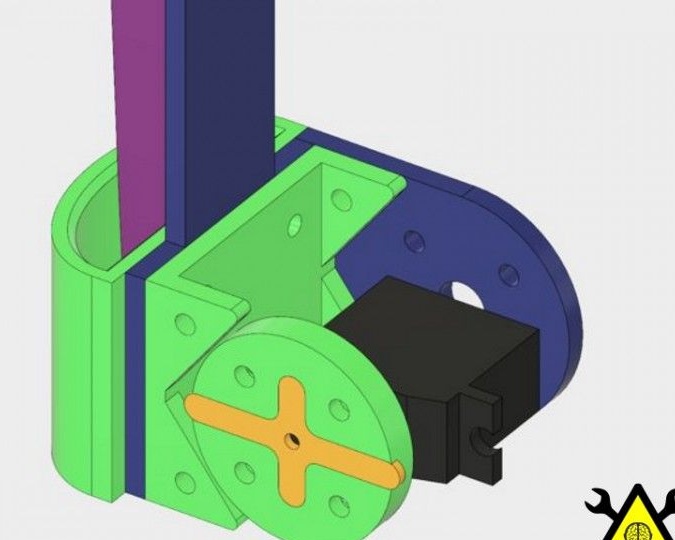
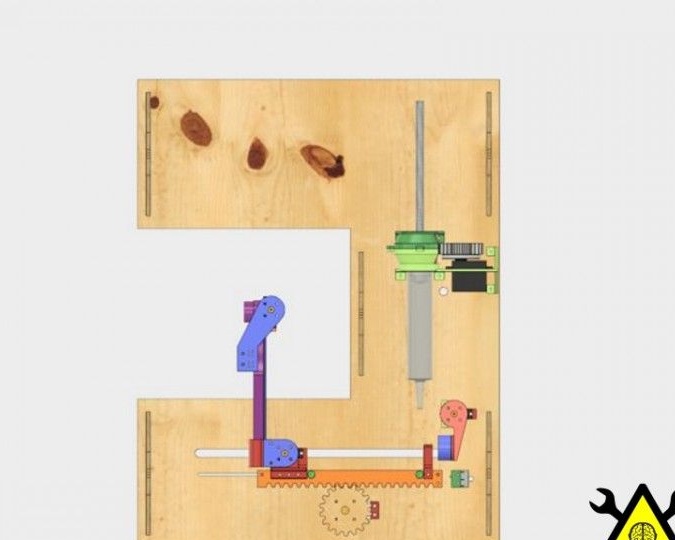
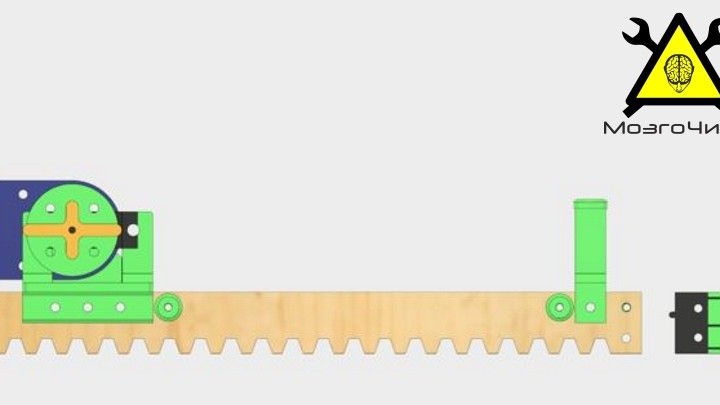
Krok piąty Montaż na szynie
Rama składa się z trzech unikalnych części, tj. Zagłówka, wózka i rozpórek. Za pomocą karetki mocowany jest uchwyt ramy. Sam wózek jest przymocowany za pomocą trzech śrub. Zagłówek jest potrzebny w celu zmniejszenia obciążenia głównego serwomechanizmu, mocowany jest dalej na wózku na ramie.
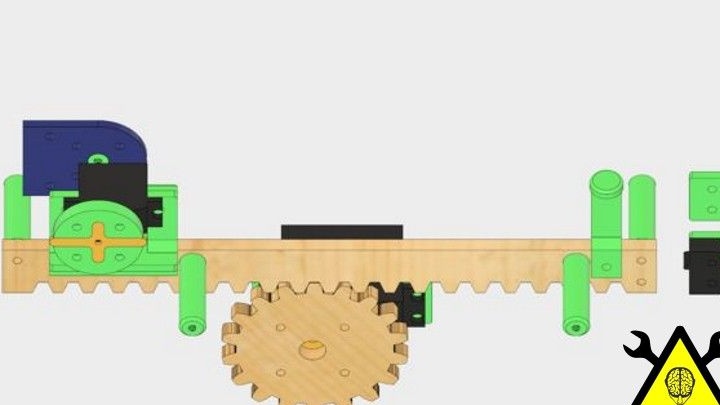
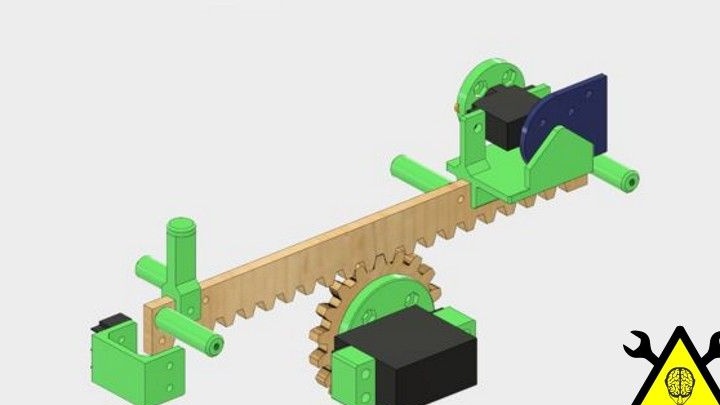
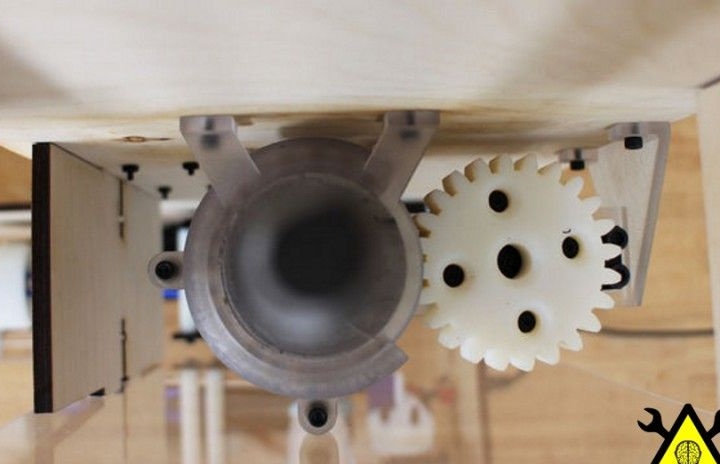
Koło zębate jest zamontowane poniżej ramy. Jest wycięty ze sklejki o grubości 6 mm i przymocowany do standardowego wałka serwo. Sam serwonapęd jest lekko odsunięty od płyty podstawy, w związku z tym są na nim identyczne prostokątne rozpórki. Sam serwo jest przymocowany do podstawy za pomocą czterech śrub.
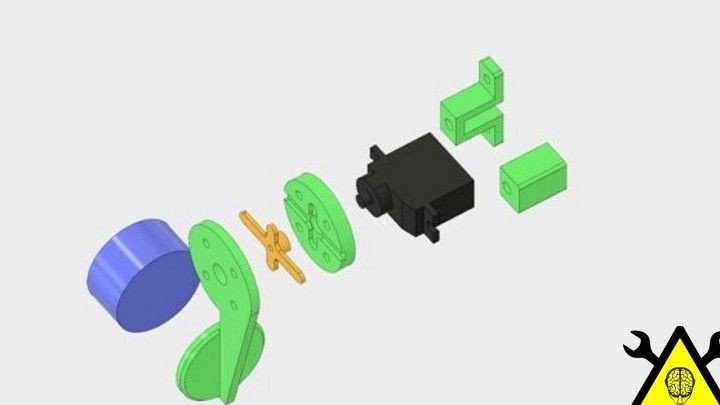
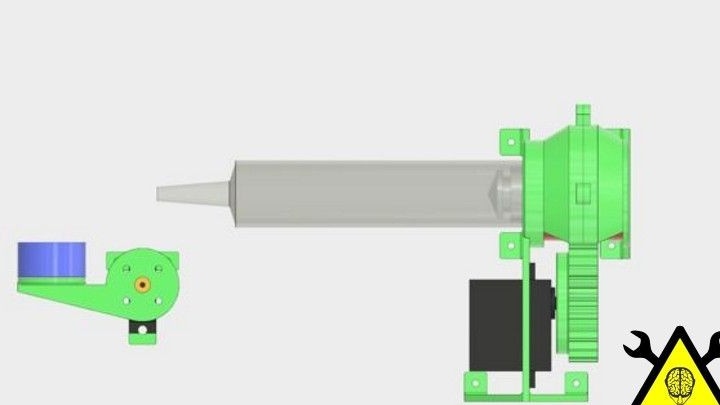
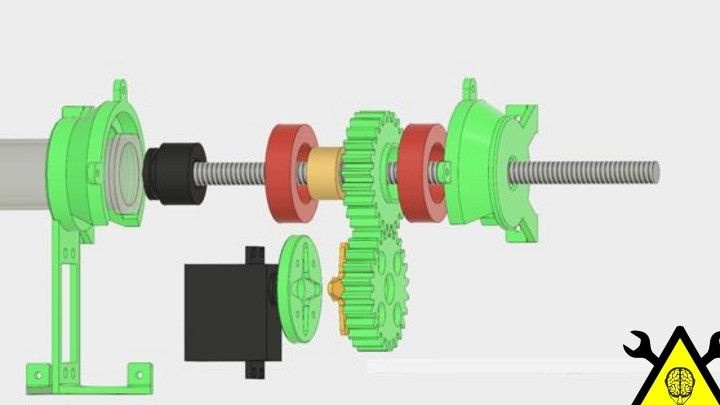
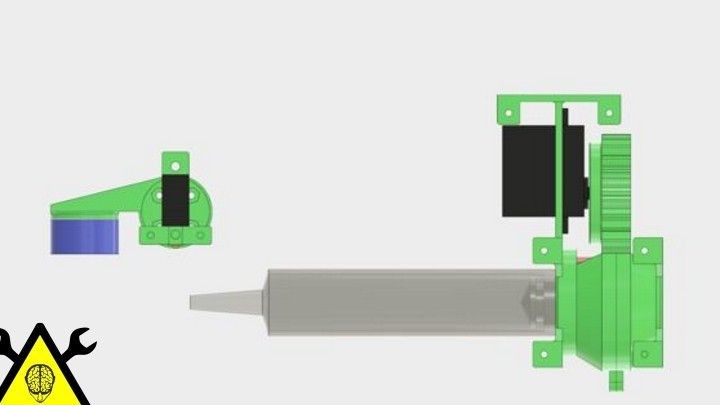
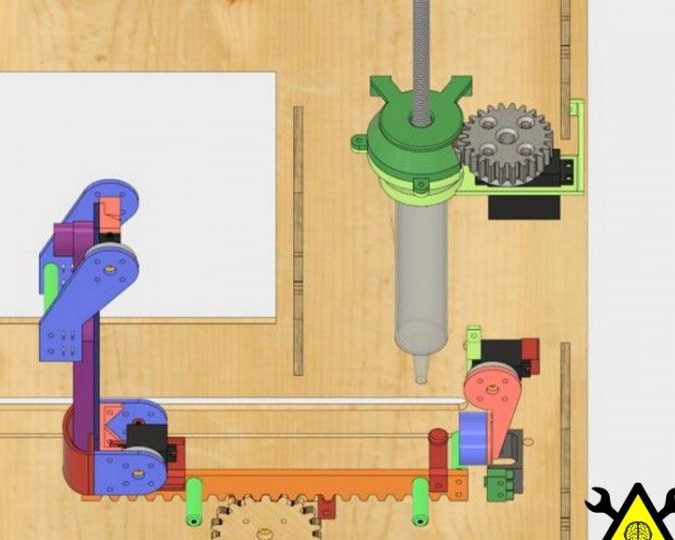
Krok szósty Montaż dozownika
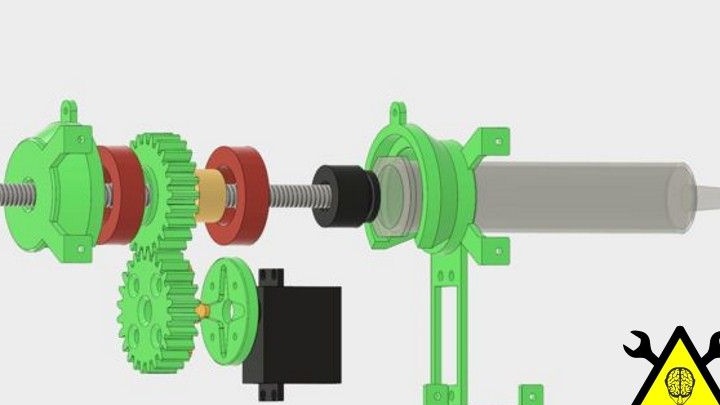
Najbardziej złożonym mechanizmem w urządzeniu jest napęd liniowy. Dzięki niemu następuje dozowanie pasty. Rdzeń urządzenia to pręt gwintowany i nakrętka, przy pomocy których rura jest ściskana. Sześć śrub służy do zabezpieczenia napędu.
Siódmy krok. Oprogramowanie
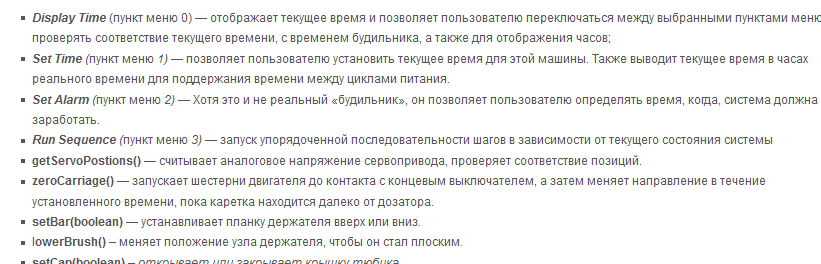
W sumie program ma trzy funkcje: ustawianie czasu, ustawianie „alarmu”, a także funkcję uruchamiania urządzenia.
To wszystko, po flashowaniu i skonfigurowaniu urządzenie jest gotowe do użycia.