
Materiały i narzędzia:
- mikrokontroler Arduino (w tym domowej roboty stosuje Arduino Uno Rev 3);
- Dwa serwa od Parallax;
- joystick (również z Parallax);
- płytka drukowana) mała);
- złącza do podłączenia;
- Urządzenie do śledzenia ruchu serwomotorów (używana jest zepsuta kamera internetowa i kostki Lego).
Domowy proces montażu:
Pierwszy krok Łączymy serwomotory
Proces montażu w domu rozpoczyna się od podłączenia serwomotorów. W celu złożenia wstępnego układu stosuje się płytkę drukowaną. Wtedy będzie można zrobić osobną tarczę. Na rysunku widać, jak dokładnie wszystko jest połączone.
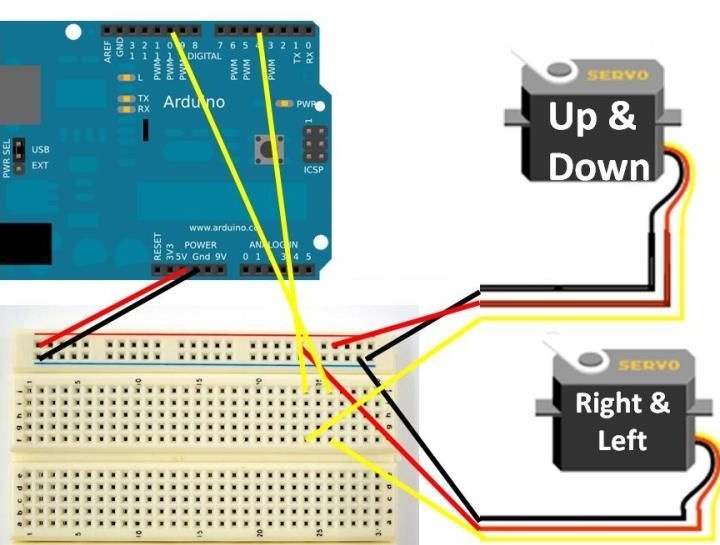
Czerwony kabel to zasilanie, które łączy się ze stykiem 5 V kontrolera Arduino.
Czarny drut jest minusem (masa), łączy się z wyjściem Arduino o nazwie GND.
Żółty kabel prawego i lewego siłownika musi być podłączony do styku 11. W niektórych modelach może być biały.
Podobny żółty kabel góra / dół musi być podłączony do styku 4. W niektórych modelach silników może być również biały.
Należy pamiętać, że złącza sygnałowe używane do sterowania silnikiem pochodzą z wyjść PWM.
Krok drugi Podłącz joystick
Sposób podłączenia joysticka można zobaczyć na zdjęciu. Na początku schemat może wydawać się dość skomplikowany, ale w rzeczywistości nie ma tu nic skomplikowanego. Podobnie jak w przypadku silników, użyto tutaj płytki elektrycznej.
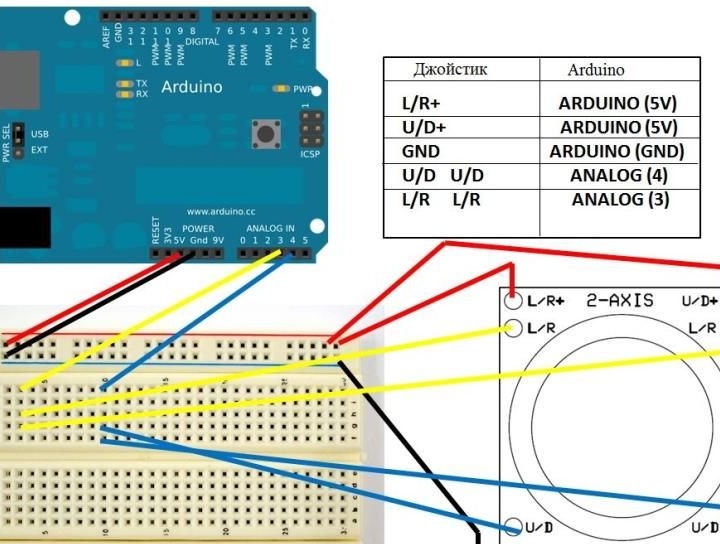
1. W module joysticka można znaleźć wyjścia U / R + i L / R +. Przez te wyjścia moc jest podłączona. W związku z tym należy przyłożyć napięcie + 5 V z odpowiedniego styku do Arduino.
2. Pod joystickiem znajdują się również dwa złącza o nazwie L / R i dwa złącza U / D. Muszą być podłączone do wyjść analogowych A3 i A4.
3. Podsumowując, ziemia na joysticku musi być podłączona do ziemi na Arduino.
Po złożeniu połączenie należy dwukrotnie sprawdzić. To z powodu błędów połączenia w większości przypadków pojawiają się problemy. Jest to szczególnie prawdziwe, gdy używana jest płytka drukowana i jest na niej wiele połączeń.
Krok trzeciSzkic dla Arduino
Kod jest bardzo prosty i zawiera szczegółowe komentarze. Powyższy kod wystarczy skopiować do Arduino IDE. Po załadowaniu kodu silniki nie powinny się poruszać. Powinny zacząć się poruszać dopiero po naciśnięciu przycisku joysticka.
Problemy, które mogą się pojawić i jak je rozwiązać
1. Jeśli silniki nie włączają się, sprawdź dwukrotnie połączenie. Wyjścia PWM służą do podłączania silników, a wyjścia analogowe służą do podłączania joysticków.
2. Zdarza się, że natychmiast po załadowaniu kodu silniki zaczynają wibrować. Dzieje się tak, jeśli niepoprawnie podłączysz piny U / D + L / R +. Połączenie należy dokładnie sprawdzić. Aby nie spalić płyty podczas testu, należy ją odłączyć od komputera.
3. Jeśli wszystko zostanie ponownie sprawdzone, ale silniki nadal nie chcą działać, możesz spróbować ponownie podłączyć joystick. Należy go wyjąć z płytki drukowanej, a następnie z pewnym wysiłkiem zainstalować z powrotem. Złącza joysticka powinny dobrze pasować do układu.
Jeśli wszystko się potoczyło, teraz możesz zacząć tworzyć dowolne domowe przedmioty sterowane za pomocą joysticka. Na przykład możesz stworzyć robota, którym można sterować za pomocą joysticka i wiele więcej.