

Robot DIY będzie świetną zabawką dla dzieci, a także z nią możesz bawić się z rodziną lub przyjaciółmi. Istota robota jest następująca. To jest pudełko z przełącznikiem. Jak tylko ktoś kliknie przełącznik na pudełku, drzwi zaczynają się otwierać, z którego wychodzi ręka i przywraca przełącznik do pierwotnego stanu. Pomimo zewnętrznej prostoty robota, wszystko to wygląda całkiem zabawnie.
Podstawą do stworzenia robota jest obwód Arduino. Istnieje również kilka elementów mechanicznych, które zostaną omówione poniżej. Zastanówmy się bardziej szczegółowo, jak to zrobić zrób to sam zmontować takiego robota.
Materiały i narzędzia do produkcji:
- Tablica Arduino, każda z wyjściami PWM zrobi;
- siłowniki, dwuczęściowe (odpowiednie model Futaba - S3003, moc takiego silnika wystarcza do otwarcia drzwi, urządzenie wytwarza do 3,2 kg / cm mocy);
- baterie;
- typ przełącznika SPST lub SPTT;
- przełącznik kontrolujący moc baterii;
- potrzebujesz przycisku, aby ponownie uruchomić Arduino;
- przewody, mostki i inne drobne rzeczy.

Ponadto potrzebna będzie skrzynia biegów (odpowiednia do samochodów sterowanych radiowo), tablica silnika elektrycznego zwana tarczą silnika Arduino, serwosilnik RC. Te elementy są potrzebne, aby poruszać ramką, podobnie jak autor.
Aby zmniejszyć poziom hałasu podczas pracy urządzenia, potrzebny jest kondensator elektrolityczny o wartości nominalnej 10mF, rezystor 10K i falownik 74HC04.
Proces produkcyjny robota:
Pierwszy krok Jak zrobić pudełko
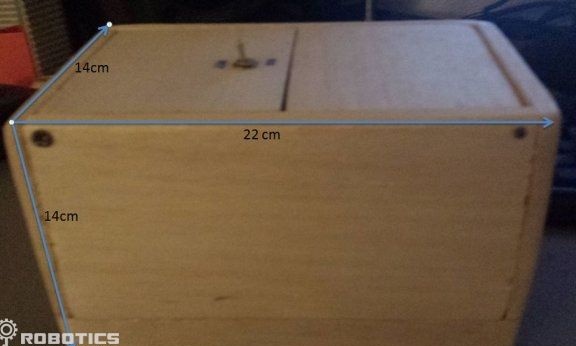
Aby stworzyć pudełko, czyli ciało robota, musisz znaleźć sklejkę lub korek. Ponadto potrzebujesz mocnego kleju do klejenia drewna. Ważne jest, aby zrozumieć, że im więcej waży struktura, tym więcej energii zostanie zużyte. Jeśli chodzi o rozmiar pudełka, jest to 22 cm x 14 cm x 14 cm.
Krok drugi Schemat ideowy e części
W górnej części robota znajduje się płyta główna Arduino, dwa serwomechanizmy i przełącznik. Jeśli chodzi o obwód, który odpowiada za ilość hałasu, można go zastąpić zwykłym rezystorem.
Serwonapędy są zasilane przez piąty styk płyty Arduino. Jeśli chodzi o przewody sygnałowe, są one połączone ze stykami 9 i 10. Dzięki tym stykom PWM kontrolowany jest kąt obrotu serwomotorów. Jest to kąt od 0 do 180 stopni.
Czerwony przycisk jest potrzebny do ponownego uruchomienia Arduino.
Na dole obwodu znajduje się płyta ekranowa silnika Arduino.Na płycie widać dwa kanały, A i B, dzięki którym w razie potrzeby możesz podłączyć dwa silniki jednocześnie. Głównym zadaniem tej płyty jest to, że za jej pomocą można programowo ustawić prędkość obrotową, kierunek, przerwy dla dowolnego kanału silników. Jeśli spojrzysz na schemat, wówczas wykorzystywany jest kanał B, podczas gdy styk 13 określa kierunek, styk 11 jest prędkością, a styk 8 służy do sterowania hamulcami.
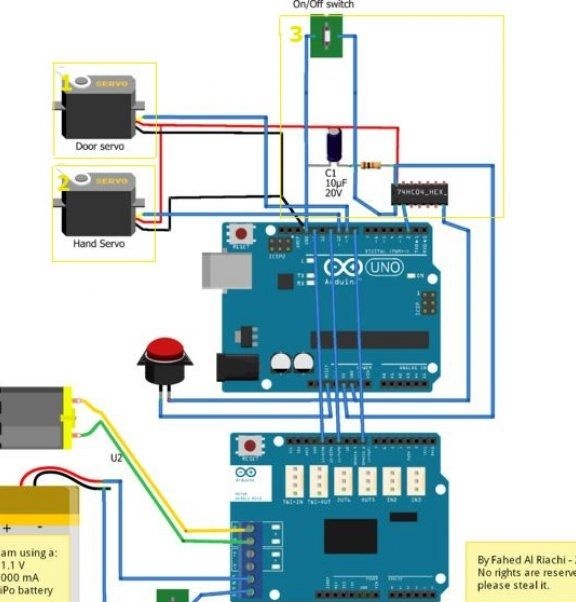
Źródłem zasilania jest akumulator 11,1 / 1000 mA, który łączy się z płytką osłony silnika Arduino. Jeśli nie będzie używany, akumulator jest bezpośrednio podłączony do płyty głównej.
Krok trzeci Instalacja silnika
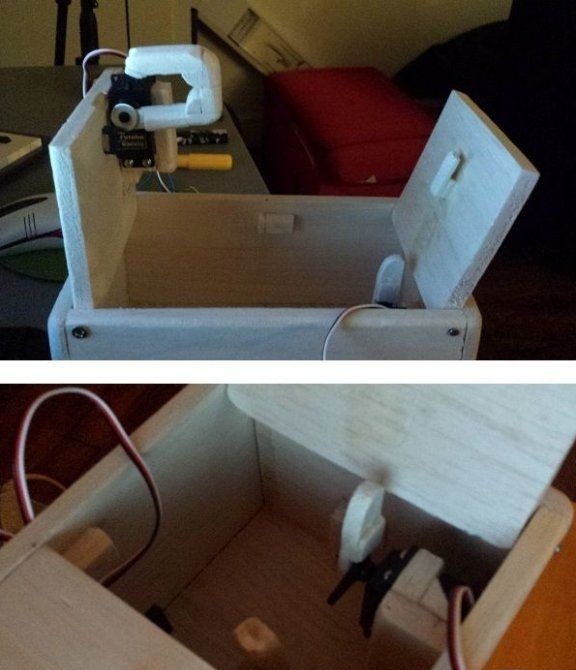
Napęd serwo i dłonie są instalowane eksperymentalnie, musisz w praktyce sprawdzić, czy mechanika działa poprawnie. Aby sprawdzić promień odchylenia silników, możesz użyć programu Arduino IDE.
Do produkcji ręcznie pozyskiwanego drewna dowolnego rodzaju. Najważniejsze jest to, że jest lekki, ponieważ w przeciwnym razie wzrośnie zużycie energii. Jeśli chodzi o rozmiar dłoni, jest on regulowany podczas instalacji, wybierając żądaną długość, uzyskuje się pożądany efekt.
Popychacz pokrywy i dłoń są zamontowane tak, aby nie dotykały serwomotoru podczas pracy.
Krok czwarty Podłączamy siłownik i przełączamy na Arduino
Za pomocą przewodów i zworek musisz połączyć ze sobą wszystkie elementy elektroniczne zgodnie z określonym schematem. Przewody muszą być ułożone tak, aby nie zakłócały ruchomych elementów robota.
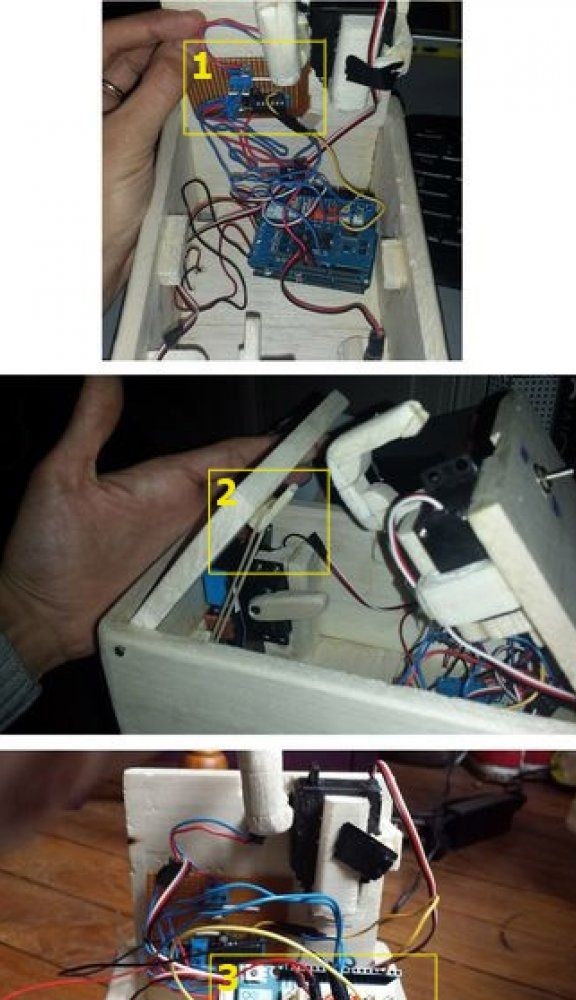
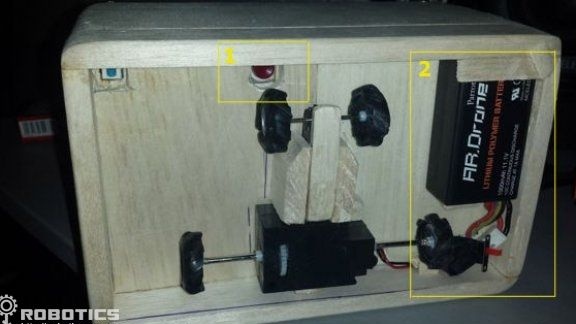
Pod numerem 1 możesz zobaczyć, jak jest podłączony i gdzie znajduje się obwód przełączający. Numer 2 oznacza taki element jak elastyczna taśma, jest potrzebny, aby drzwi otworzyły się z pewnym napięciem. Cóż, liczba 3 oznacza osłonę silnika zainstalowaną na Arduino.
Krok piąty Montaż części mechanicznej do przesuwania skrzynki
W dolnej części pudełka znajduje się akumulator, silnik z kołami, skrzynia biegów, przycisk resetowania i przełącznik dźwigniowy do kontrolowania mocy robota. Przed dołączeniem elementów musisz obliczyć bilans masy pudełka. Aby robot był stabilny, oprócz osi prowadzącej, instalowana jest kolejna dodatkowa oś.
Krok szósty Kolejna dodatkowa funkcja
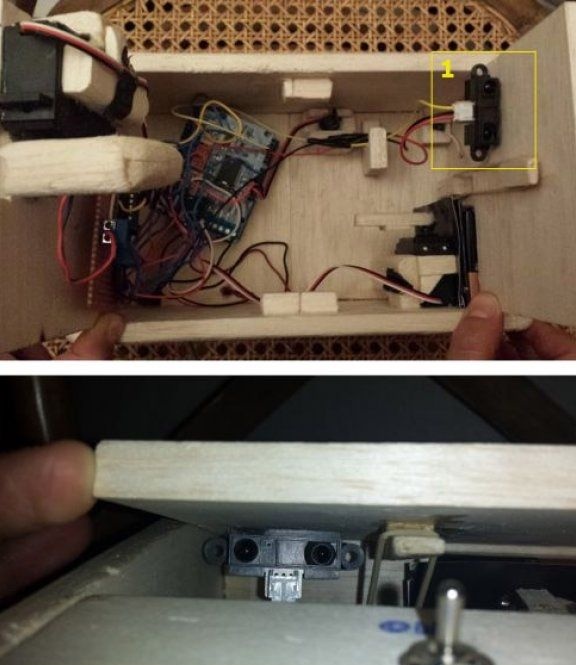
Aby robot mógł określić kierunek ruchu, może być wyposażony w czujnik podczerwieni. Jednocześnie, gdy ktoś spróbuje dotknąć przełącznika, pole przesunie się w prawo i w lewo. Do tych celów odpowiedni jest czujnik GP2Y0A21, który ma trzy przewody. Żółty musi być podłączony do trzeciego styku Arduino, czerwony do styku 5, a czarny do uziemienia.
To wszystko, prosty i zarazem zabawny robot jest gotowy. Taka zabawka przyniesie radość nie tylko dziecku, ale także zaskoczy wielu dorosłych.
Oprogramowanie układowe: