


Prawie wszystkie nowoczesne urządzenia do sterowania modelami radiowymi (takie jak Futaba, Hitec, Multiplex, FlySky itp.) Mają na pokładzie złącze TRAINER z wyjściem sygnału PPM (zasada kodowania analogowego), który służy do podłączenia nadajnika (panelu sterowania) do komputera w zwykłym trybie joysticka, dzięki czemu możesz wirtualnie trenować w trybie wirtualnym model samolot, helikopter itp. bez ryzyka złamania prawdziwego modelu. Do podłączenia pilota do komputera używane są specjalnie zakupione kable adapterów,
Rodzaj takich

Ale my mieszkańcy naszej strony możemy zrobić domowy analog adaptera, jedną z najlepszych opcji obwodu jest kabel USB mikrokontrolera atmega8, zaprojektowany przez Olega Semenova, Vadima Kushnira, Vitaliya Puzrina. To samodzielnie wykonane oprogramowanie może pracować z dowolną liczbą impulsów kanału z pilota (nadajnika) i nie zależy od ich polaryzacji, nie wszystkie zakupione adaptery mogą to zrobić.
Krok 1. Czego potrzebujemy.
•
• BC 547 (lub KT315, KT3102)
• Dwie diody Zenera dla 3.3-3.6v. (np. 1N5226, 1N5527, KC133)
• Rezystory 68 Ohm-2 szt., 2,2k., 4,7k., 10k., 200k., Kondensator 0,22
• Ceramiczny lub kwarcowy kryształ przy 12 MHz
• Przedłużacz USB 1m. lub więcej (na części), kabel S-video (na części)
• Akcesoria lutownicze, płytka drukowana.
Krok 2. Wykonanie wtyczki do złącza „TRAINER”.
Wtyczka kabla S-video jest idealna do złącza TRAINER.
Tylko to musi być najpierw odpowiednio przylutowane.
Na zdjęciu: Jest to standardowe okablowanie kabla S-video.
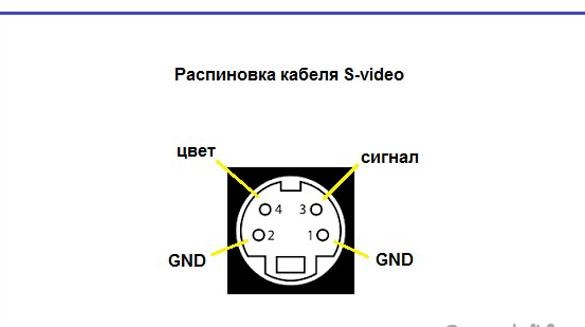
Na zdjęciu: I musimy go powtórzyć zgodnie z poniższym schematem.

Ta opcja jest odpowiednia dla pilotów FlySky, dla innych producentów pilotów pinout może być inny, więc najpierw musisz dodatkowo sprawdzić wygląd w Internecie.
Do pracy z symulatorem użyty zostanie tylko 1 pin - sygnał PPM i GND.
Bierzemy kabel s-video i odcinamy potrzebną wtyczkę.

Usuwamy plastikową obudowę (skrzynkę), jeśli nie można jej usunąć, wykonujemy cięcie nożem i usuwamy.
Wewnątrz jest jasne, że dwa przewody wejściowe są przylutowane do niewłaściwych styków naszego obwodu, a pozostałe dwa styki są połączone ze sobą do korpusu, co również nam nie odpowiada. Dlatego usuwamy wszystkie wnętrza.



Wyciągamy nogi GND i odłączamy je.


Bierzemy przygotowany kabel przedłużający USB, odcinamy złącze typu A kawałkiem kabla o długości 20 cm i odkładamy go na bok w celu dalszego podłączenia do płyty.

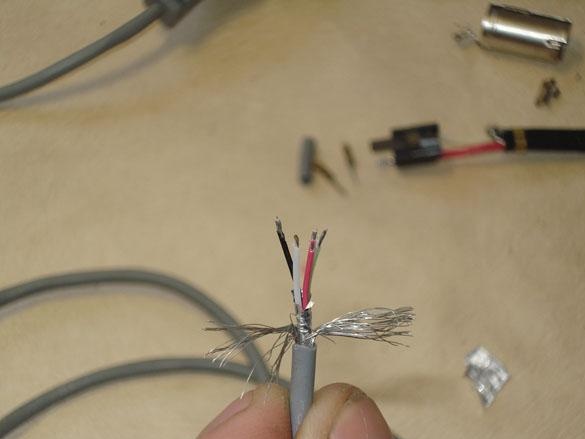
Bierzemy resztę kabla, o długości co najmniej 80 cm., Przetnij końce, aby podłączyć do wtyczki.
Natychmiast połóż osłonę na kablu.

Odebrane przewody są uszlachetnione kawałkiem koszulki termokurczliwej.

Obsługujemy końce drutów.

Przylutuj nogi złącza i włóż je na miejsce zgodnie ze schematem połączeń z pilotem zdalnego sterowania.

Montujemy złącze, naprawiamy wszystko do kleju topliwego i umieszczamy obudowę skrzynki na miejscu.






Aby naprawić wyciętą obudowę, zakładamy kilka rur termokurczliwych i zaciskamy z ogrzewaniem.





Sprawdzamy sprawność kabla otrzymanego przez tester, jeśli obwód zadzwoni, nie ma zwarcia, to kabel jest gotowy.

Teraz musisz włożyć wtyczkę z kablem do złącza TRAINER, włączyć pilota (nadajnik) i zmierzyć obecność napięcia na wyjściu drutu sygnałowego PPM, powinno ono wynosić około 3 woltów, jeśli nie jest, musisz sprawdzić napięcie bezpośrednio na wyjściu samej konsoli i skonfigurować wyjście w menu.



Krok 3. Wykonanie karty adaptera.
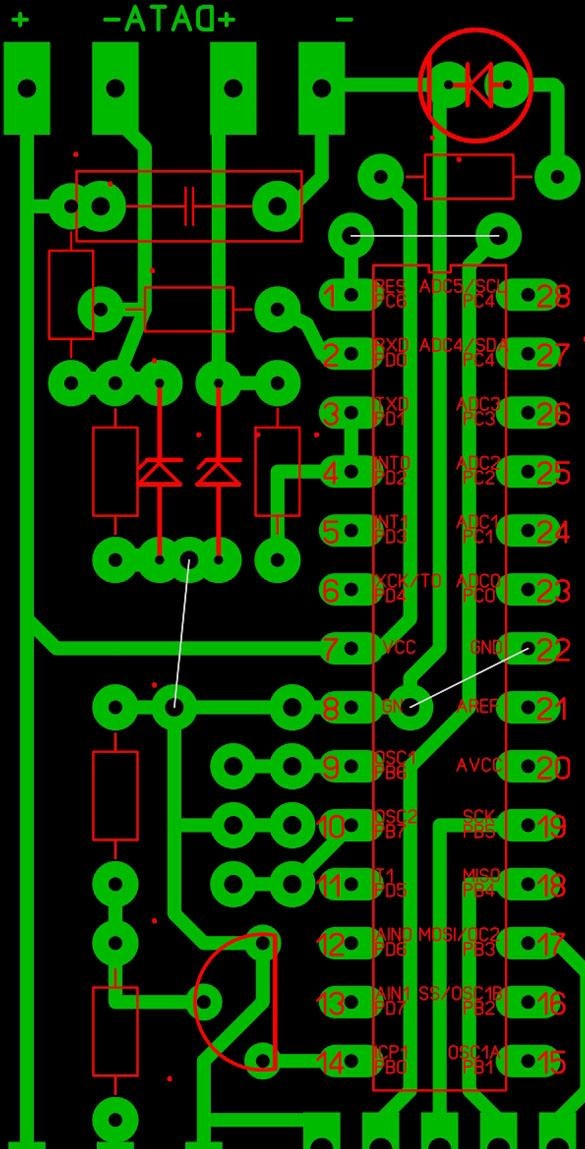
Główny obwód adaptera.
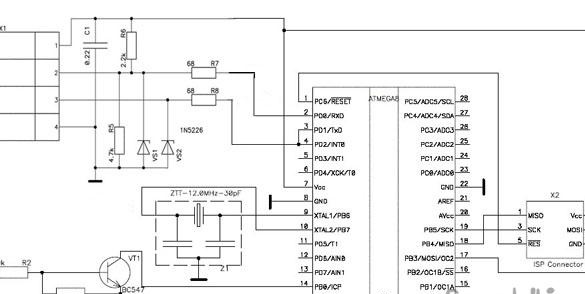
Zgodnie z tą koncepcją projektujemy płytkę drukowaną.
Dostałem tak małą tablicę, która została wykonana w programie Sprint-Layout.
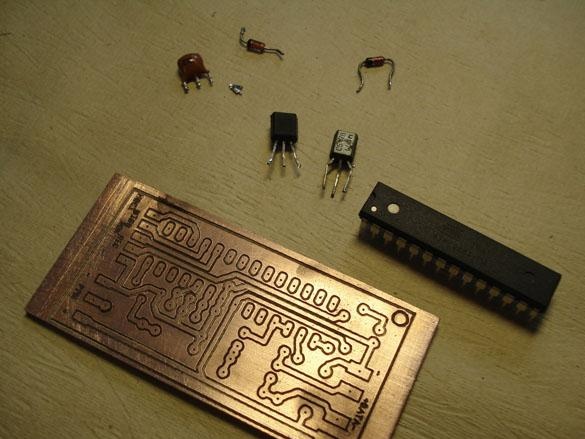
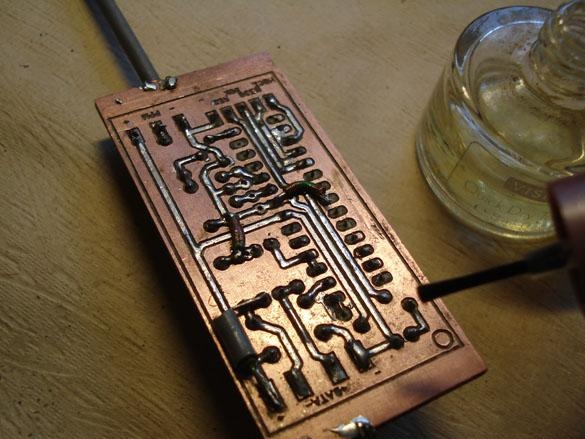
Wykonujemy samą tablicę na jeden z dostępnych sposobów: LUT, CNC itp.
Dobrze się bawię na CNC.


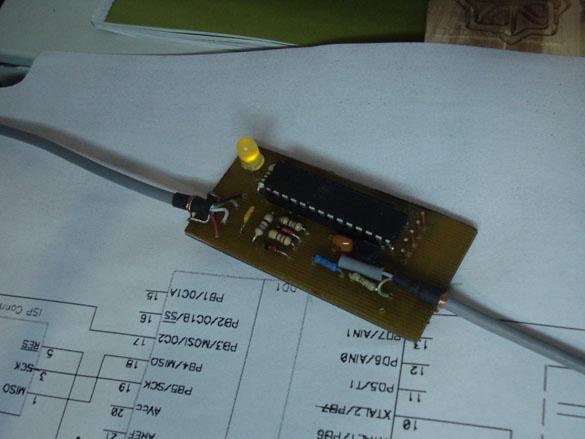
Rezultatem był taki szalik.
Krok 4. Okablowanie płyty.
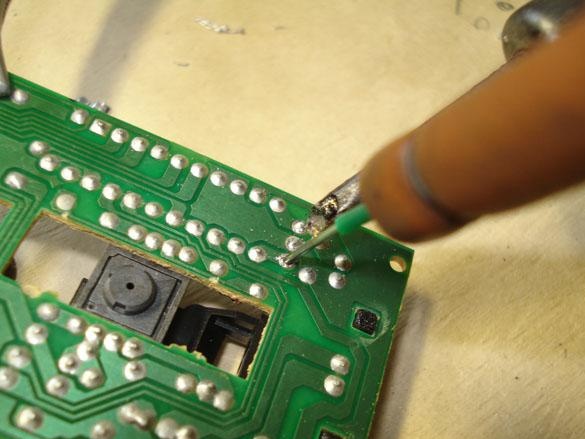
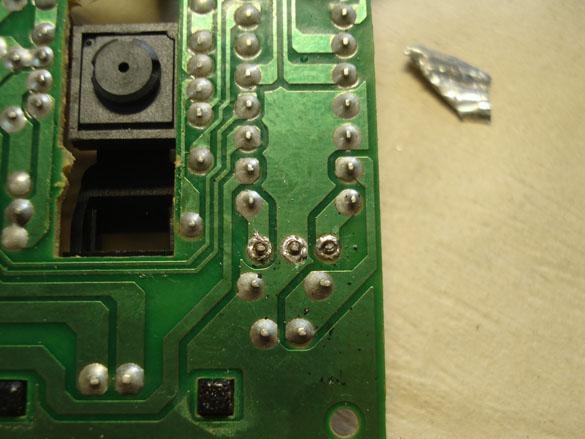
Nie spiesz się, aby od razu kupić kwarc przy 12 MHz, każdy dom ma niepotrzebną mysz komputerową USB, stary dysk flash lub inne niepotrzebne urządzenia USB, sprawdź je w środku, na pewno jest to, czego potrzebujesz.

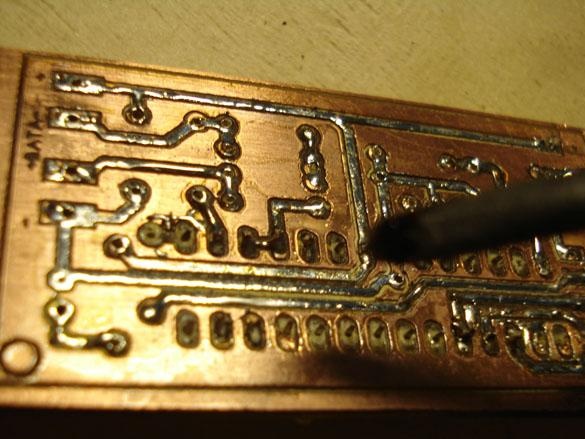
Odsysanie nie powiodło się, więc użyłem starej metody dziadka, igły ze szpica.

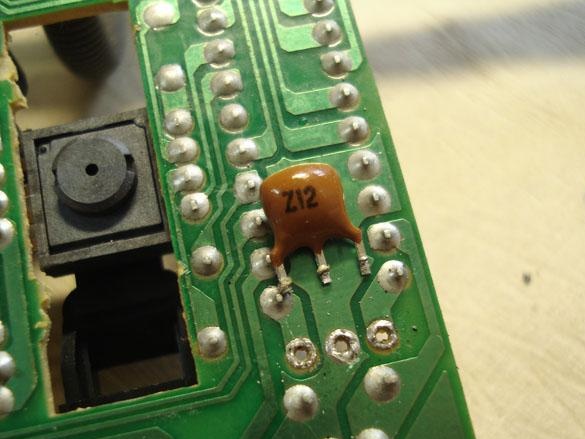
Lutujemy wszystkie szczegóły na płytce, lutujemy wyprodukowany przez nas kabel z wtyczką s-video i wcześniej przygotowanym 20 cm kablem USB.
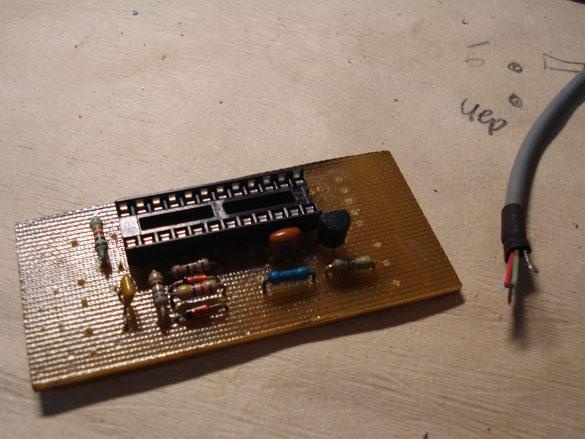
Gotową deskę pokrywamy lakierem.
Krok 5. Mikrokontroler oprogramowania układowego.
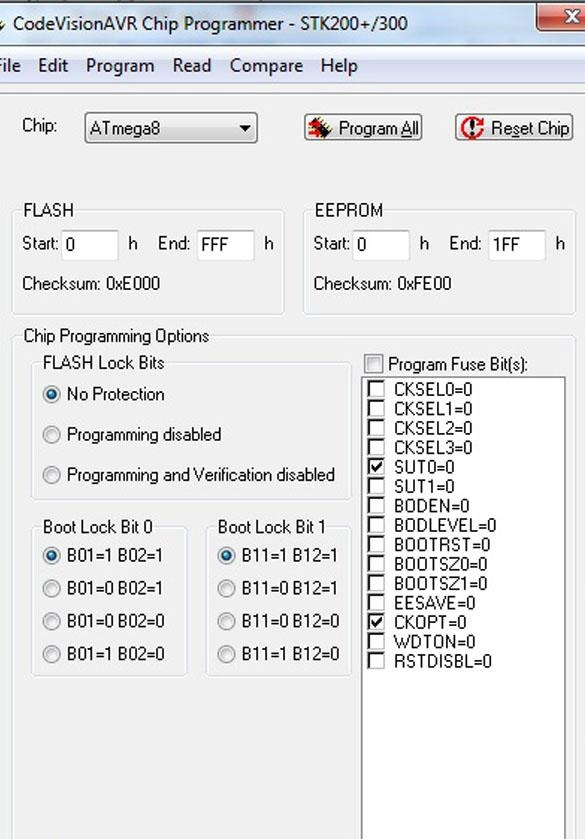
W przypadku oprogramowania układowego za pomocą programu CodeVisionAVR ujawniamy bezpieczniki, jak na poniższym zdjęciu, odpowiednio dla PonyProg i odwrotnie.
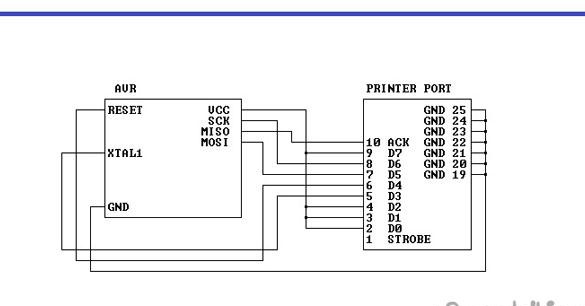
Flashujemy MK przez programator lub po prostu przez port LPT zgodnie ze schematem poniżej.
Proces oprogramowania wewnętrznego.
Krok 6. Sprawdzanie gotowego urządzenia.
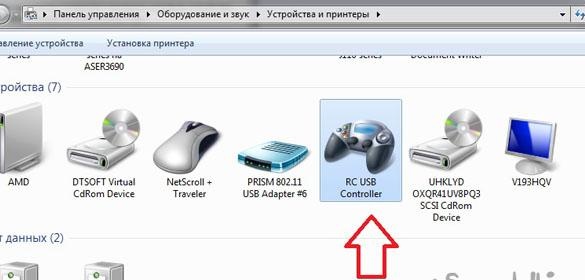
Podłączamy gotowe urządzenie do portu USB komputera, należy je zdefiniować jako urządzenie do gier (joystick), jeśli masz połączenie z Internetem, prawdopodobnie nastąpi to przed instalacją sterownika urządzenia.

Po wyświetleniu powiadomienia, że urządzenie jest gotowe do użycia, możesz przejść do URZĄDZENIA STARTOWE I DRUKARKI, tam zobaczysz obraz joysticka.
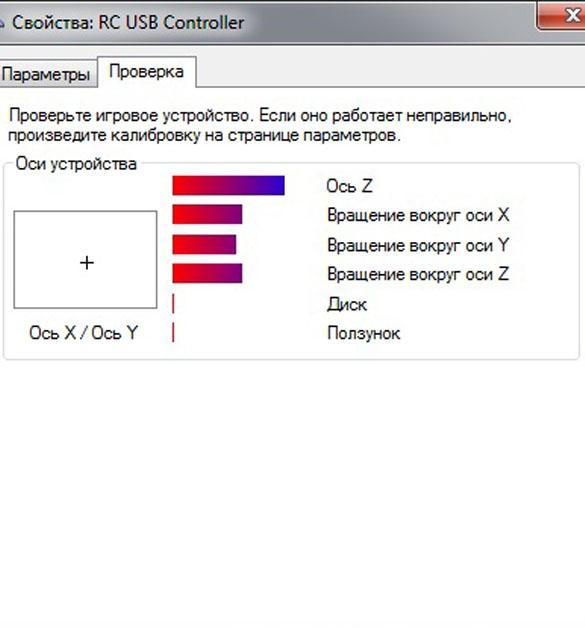
Wchodzimy w właściwości i sprawdzamy działanie osi, jeśli wszystko działa, pozostaje uruchomić jeden z wielu programów symulacyjnych, skonfigurować, przypisać osie i możesz latać!
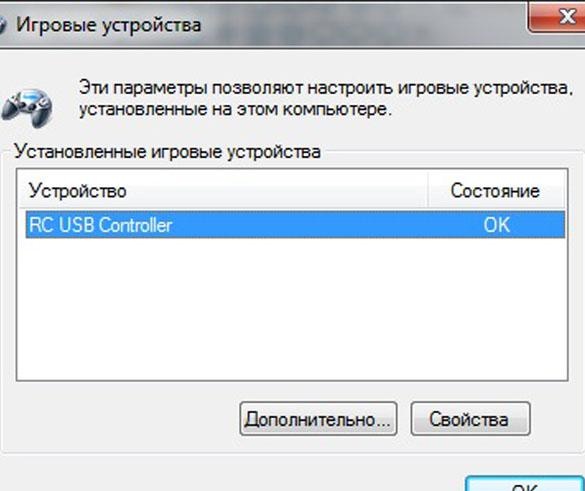
Jeśli komputer nie wykryje adaptera, musisz sprawdzić schemat połączeń.
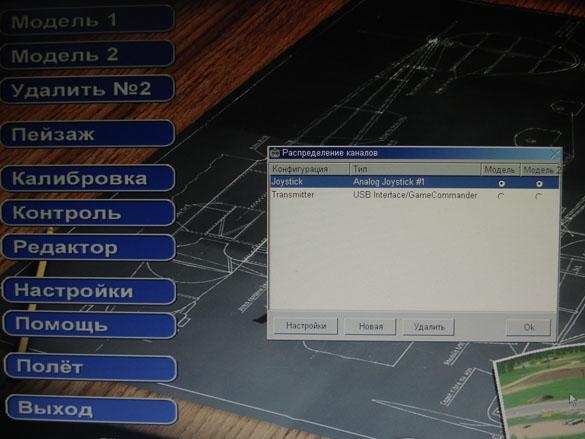
Przykład AeroFly Professional Deluxe Simulator
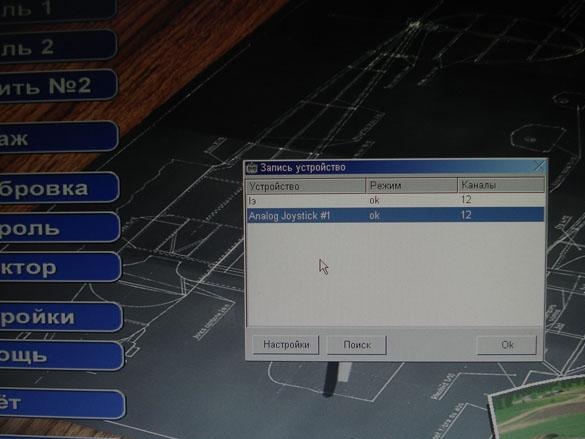
Wybieramy nasz joystick.
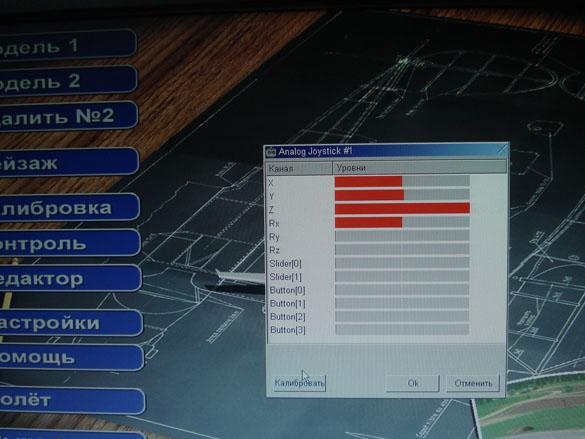
Kalibrujemy oś.
Ustaw oś na żądane kanały.
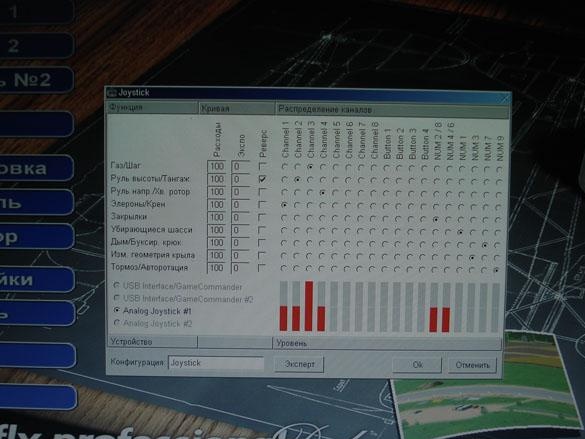
Hurra, poleciał!



Oprogramowanie układowe, schemat itp.