




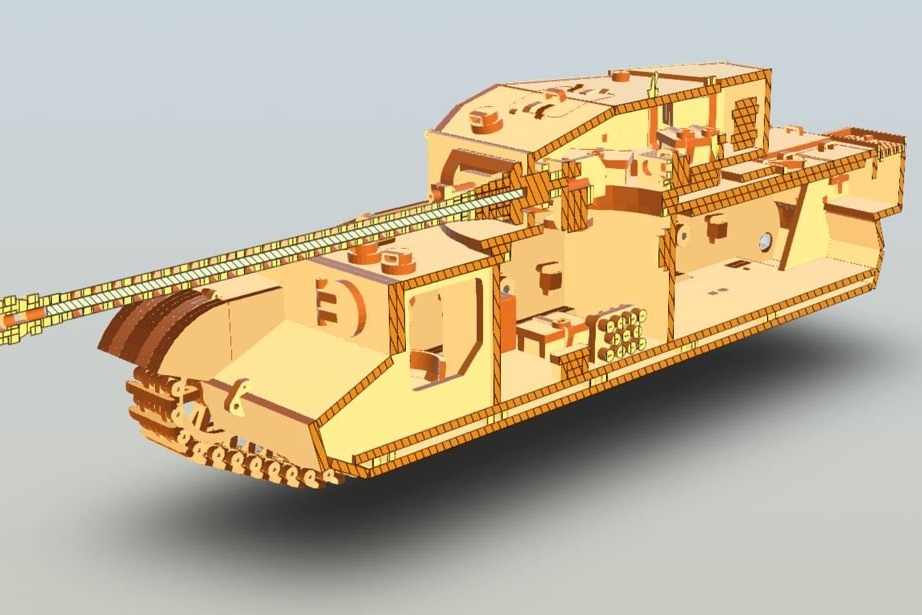
Ten czołg nie jest pierwszym montażem kapitana. Charakterystyczną cechą tego konkretnego modelu jest zawieszenie sprężynowe, wyposażające model w silnik, łatwość konserwacji.
Zobaczmy demo.
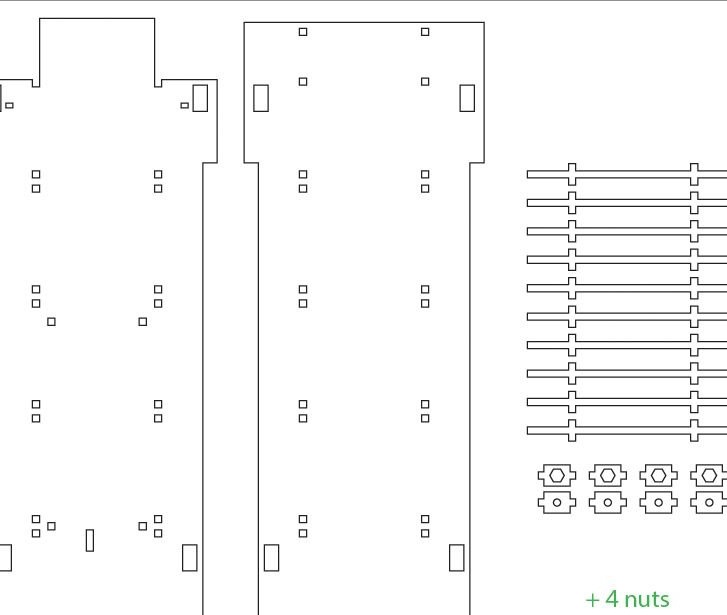
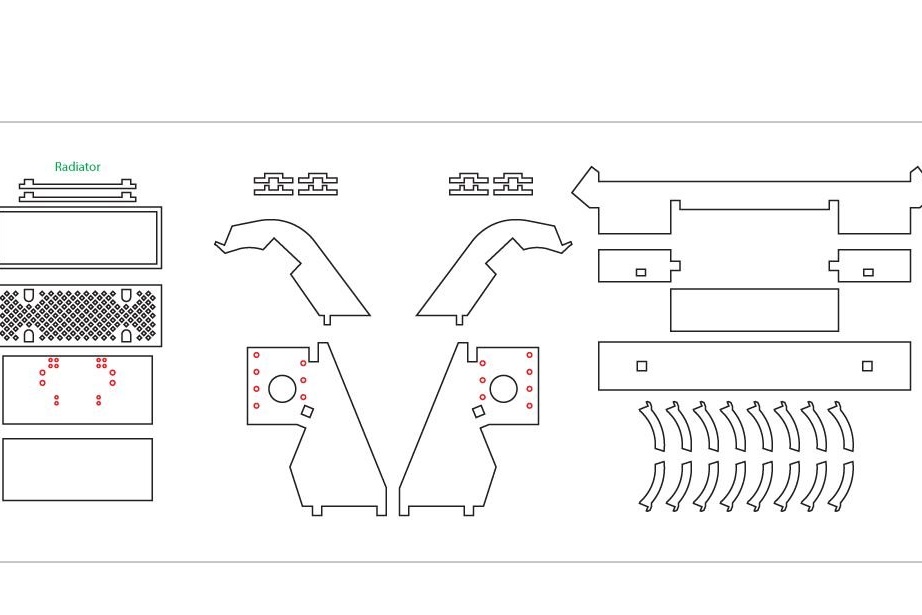
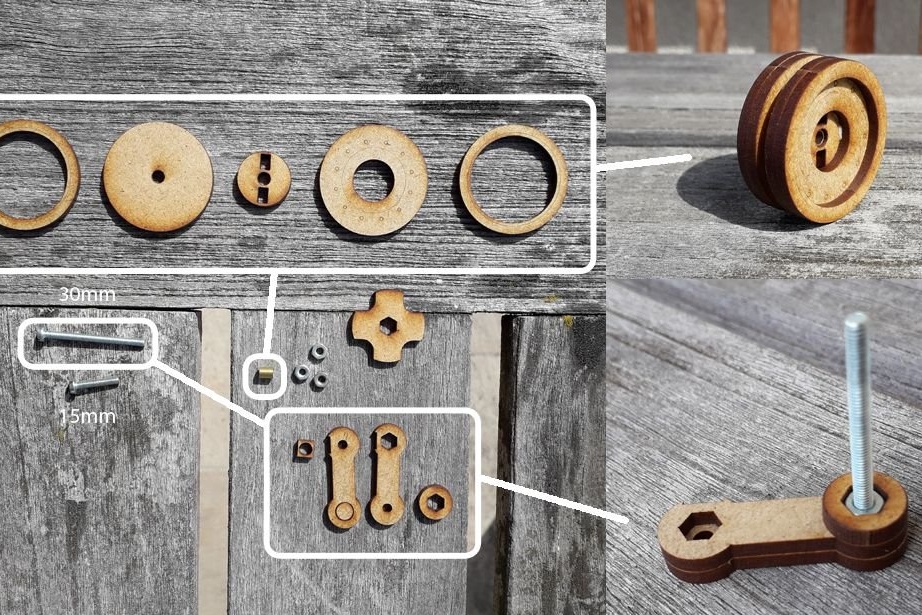
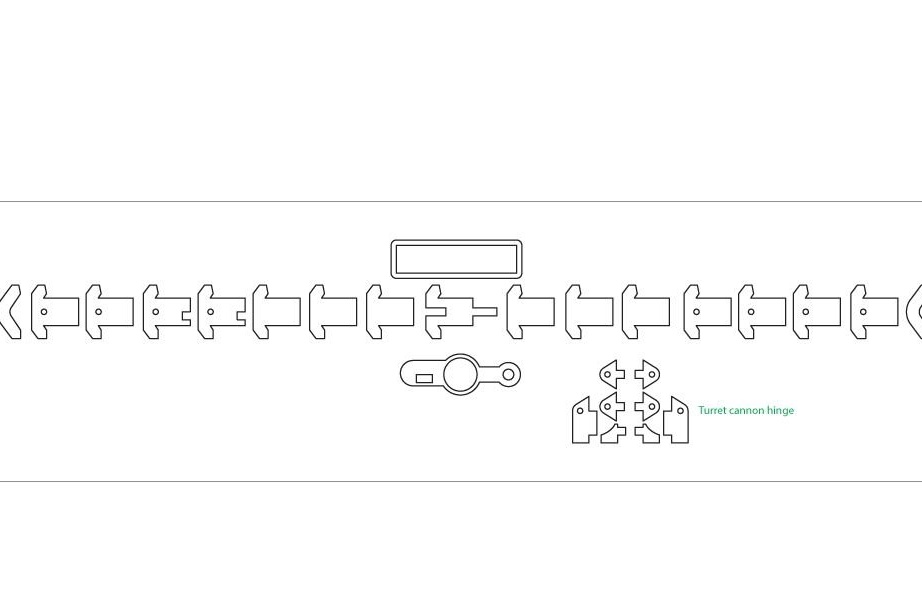
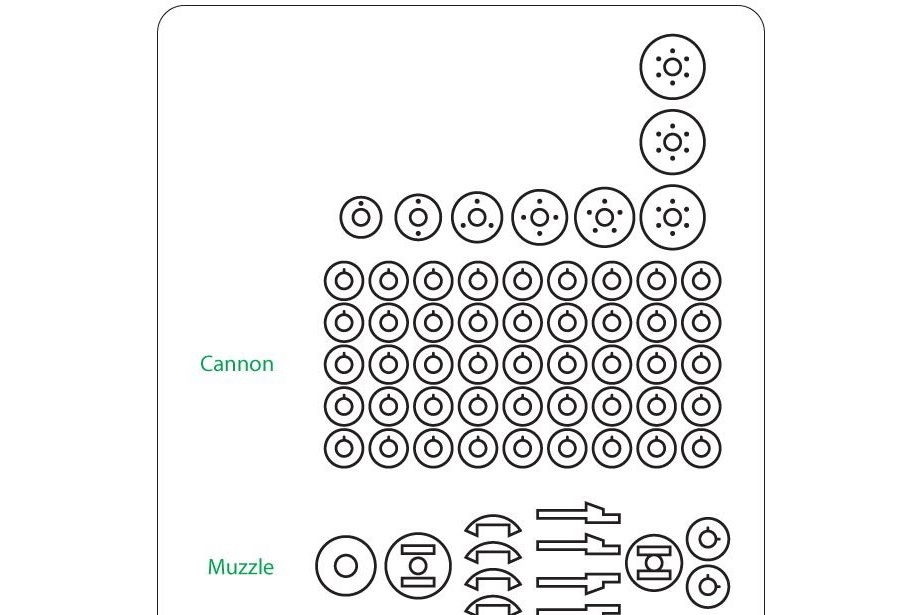
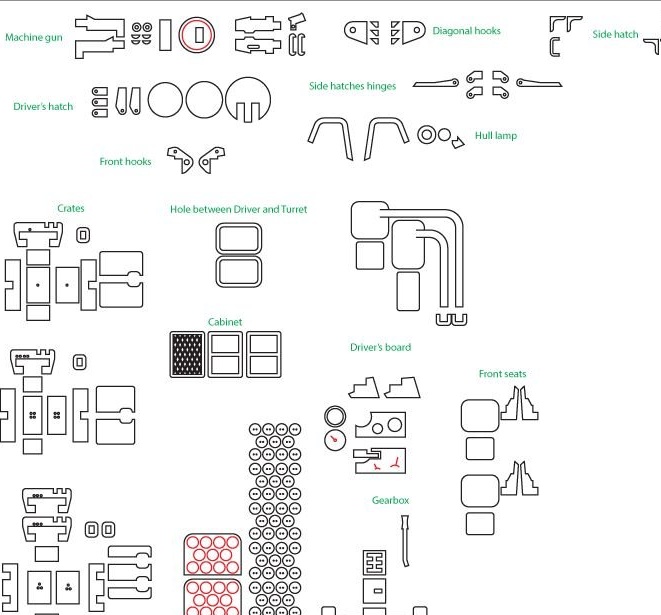
Szczegóły sprawy wycinane są na wycinarce laserowej, a pliki są dostępne pod adresem ten link.
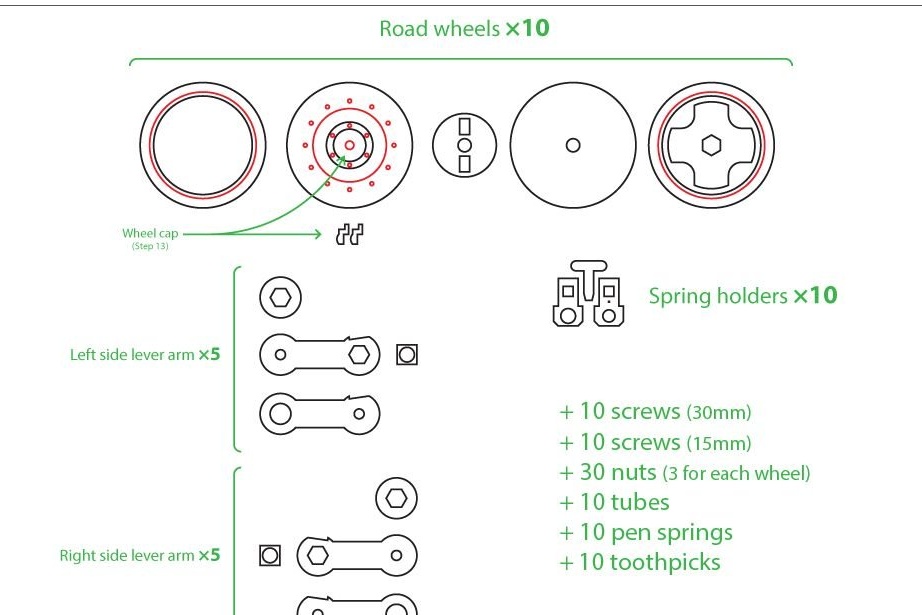
Oprócz części ciała potrzebne będą następujące elementy
Narzędzia i materiały:
- Śruby Ø 3 mm:
-14 szt. 15 mm długości,
-10 szt. O długości 25 mm,
-10 szt. O długości 30 mm.
-Rurki x20 Ø4 mm (średnica wewnętrzna Ø3 mm);
-Metalowy drut Ø 1 mm;
-Ø3 mm pręt gwintowany;
-Sprężyny do zawieszek Ø 4,5 mm i długości 30 mm -10 szt .;
- Śruby M4 2 szt .;
Wykałaczki
-Board;
Mikrokontroler ESP8266;
-Podłączanie przewodów;
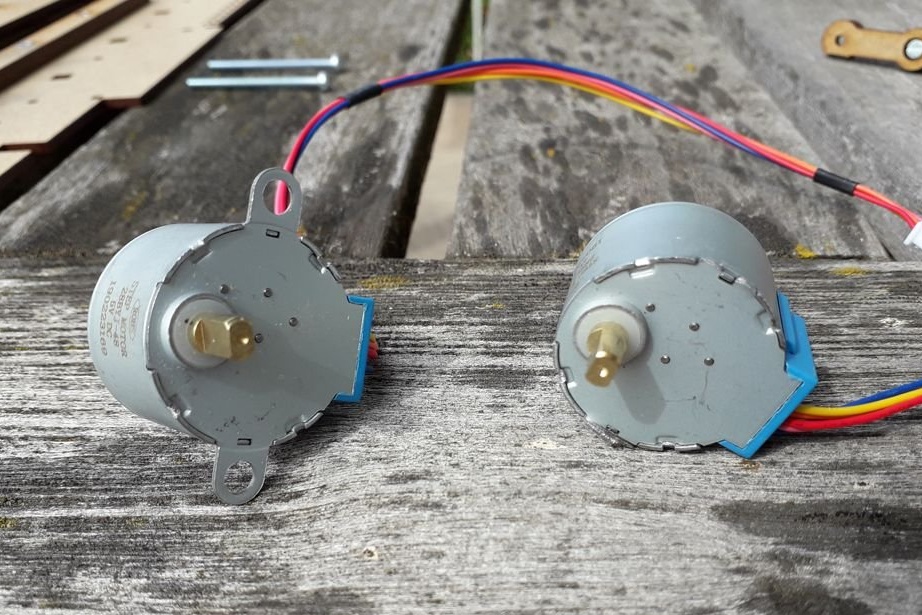
- silnik 28BYJ-48 z tablicą kontrolną - 2 szt .;
-Bateria 5 V;
Krok pierwszy: recenzja
Na tym etapie mistrz ujawnia swoje model czołg, a także wskazuje link do strony, na której widać zbiornik w rozłożonej formie.
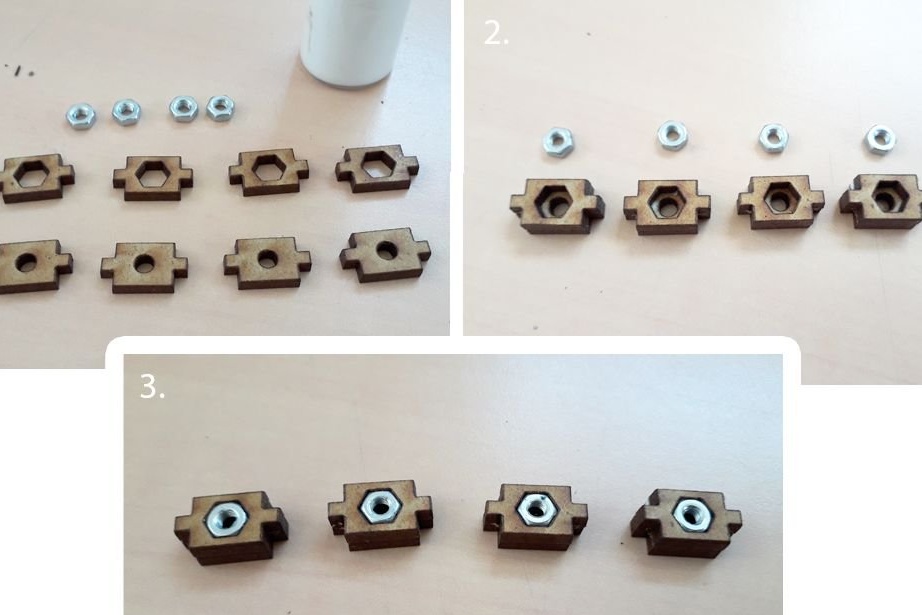
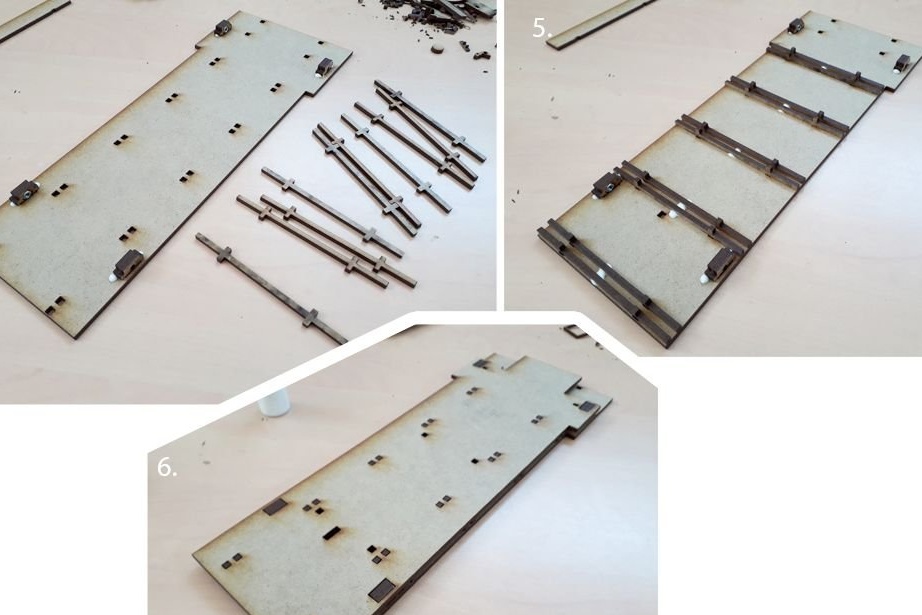
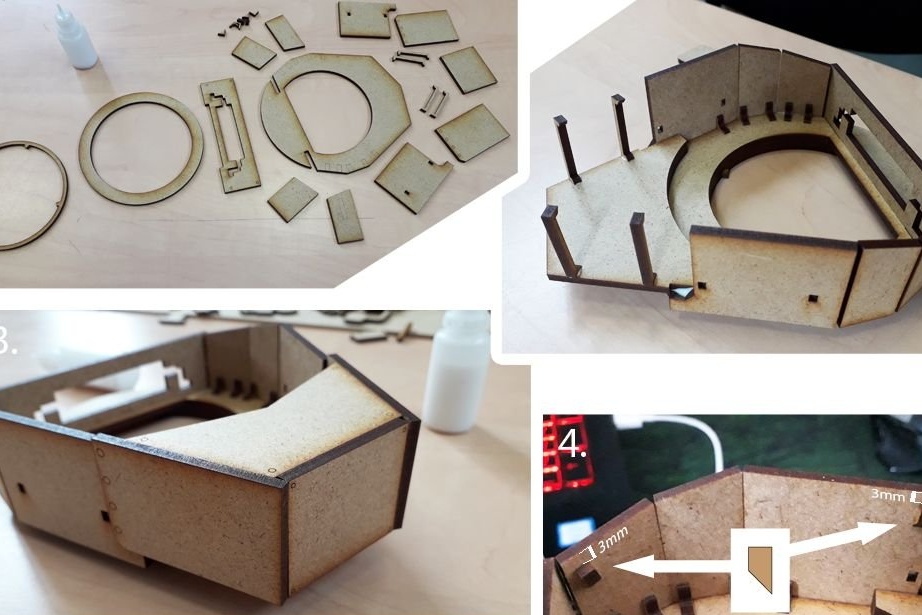
Krok drugi: na dole
Mistrz zaczyna składać od dna zbiornika. Instaluje nakrętki w mocowaniach. Montuje się po bokach dna. Ustanawia wsparcie. Ustawia drugą warstwę.
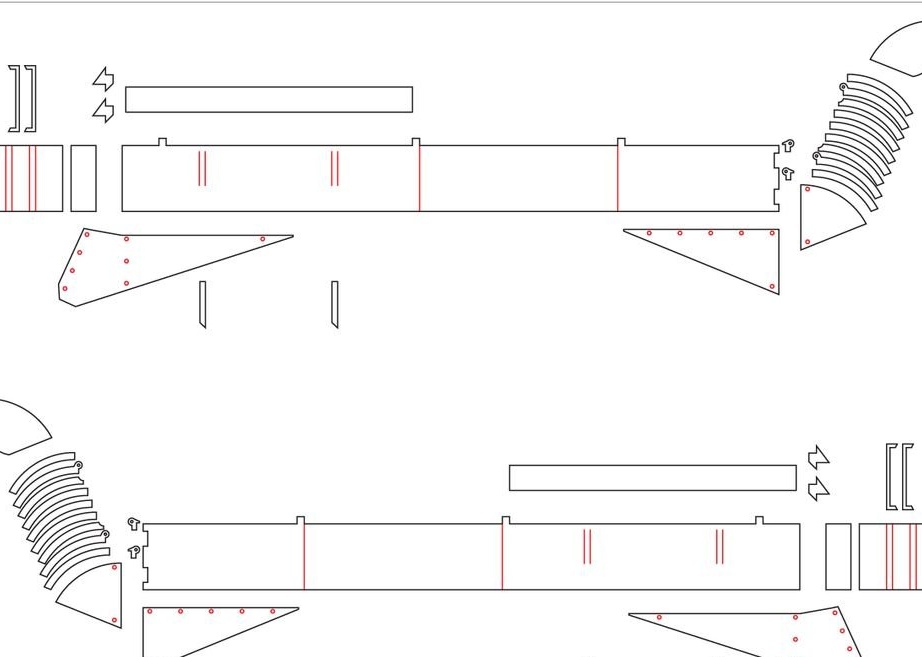
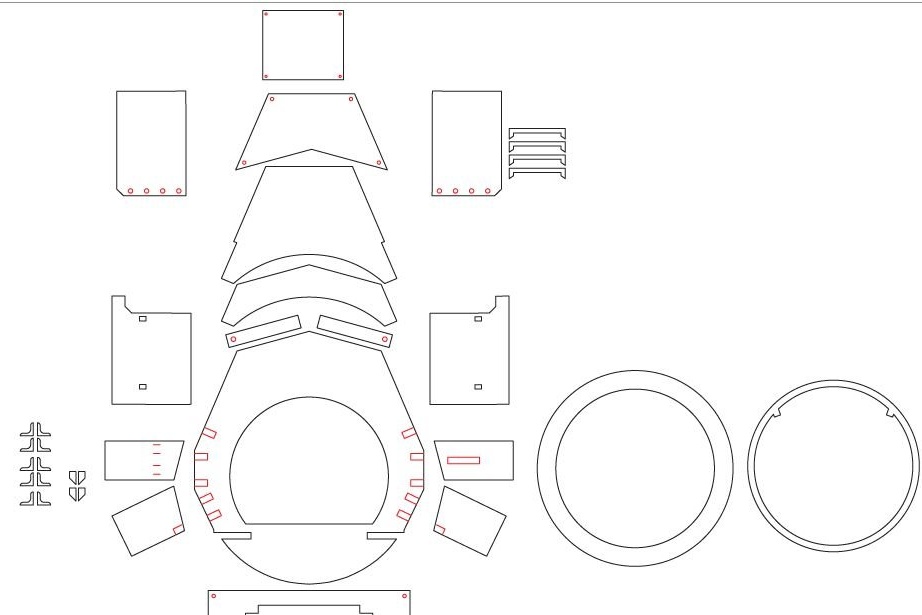
Krok trzeci: Sprawa
Rozpoczyna montaż nadwozia. Montuje grzejnik i plecy.
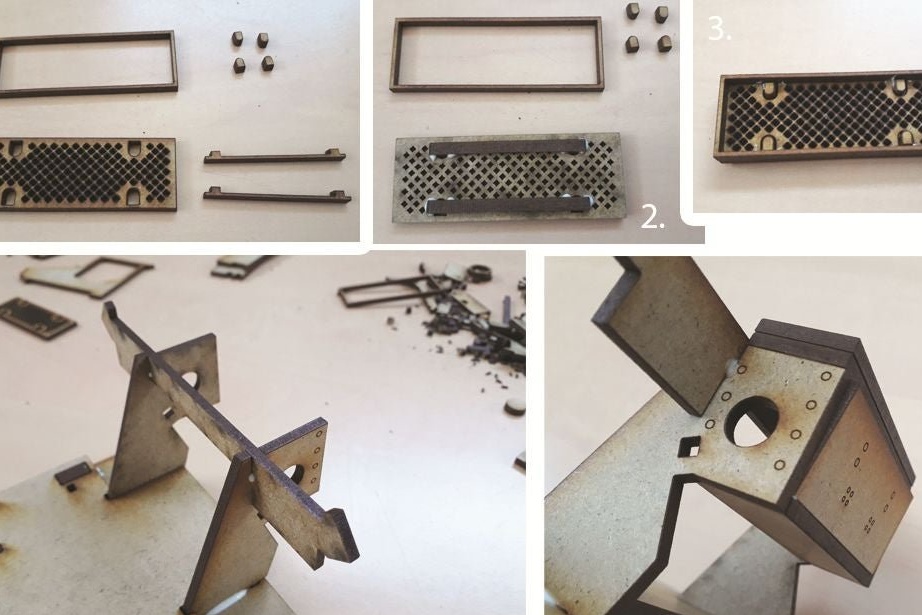
Zbiera przód.
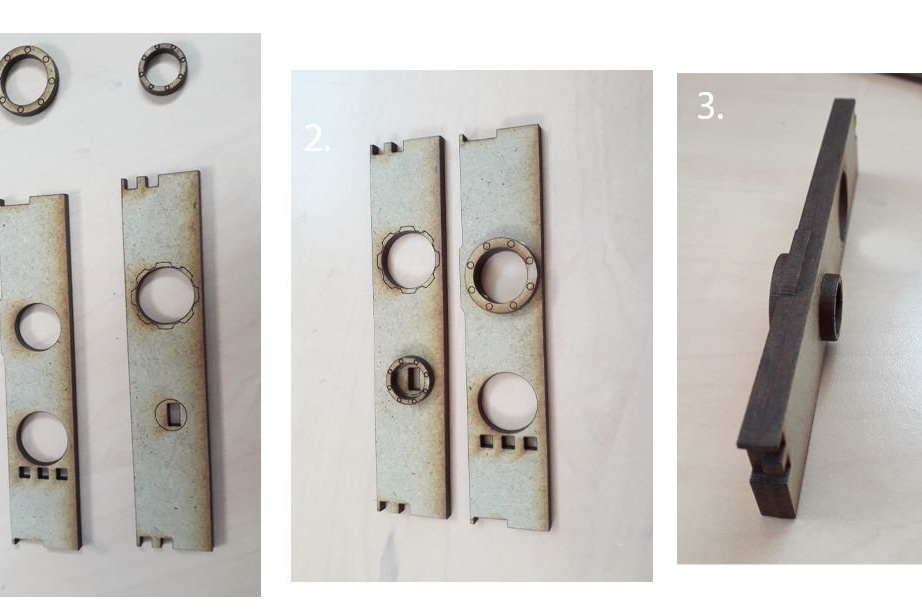
Po umieszczeniu przedniego pancerza kadłub jest gotowy. Inne części zostaną przykręcone lub przyklejone do niego bez klejenia
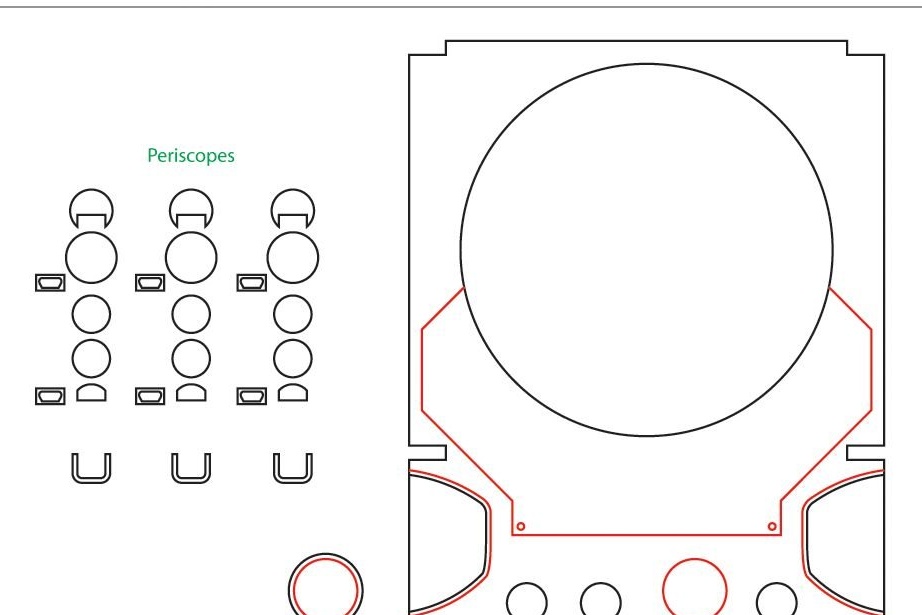
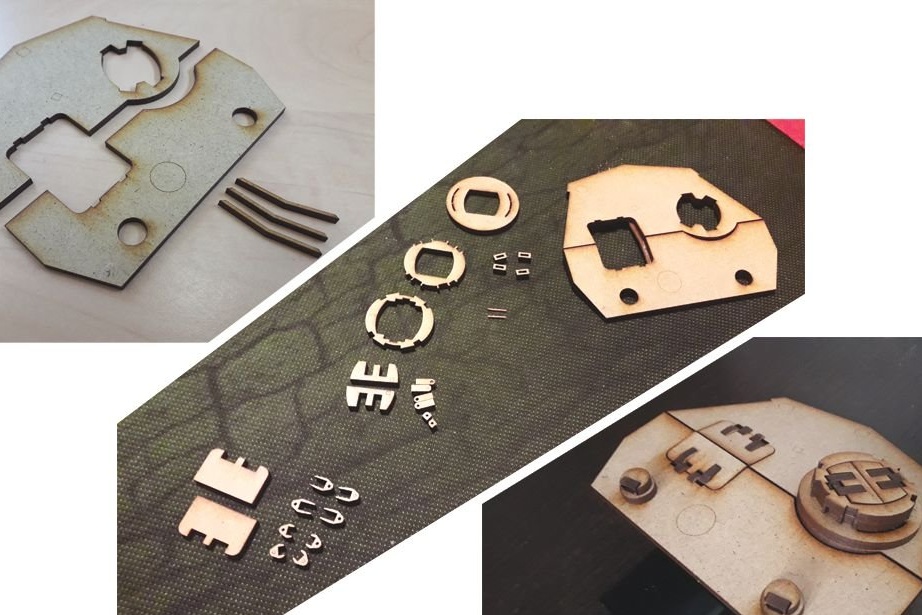
Krok czwarty: dach i peryskop
Ta część jest częścią wymienną. Odbywa się to w celu uzyskania dostępu do wnętrza. Dźwignia peryskopu jest zainstalowana na końcu dachu. Peryskop jest umieszczony na dachu, ale go nie przykleja.

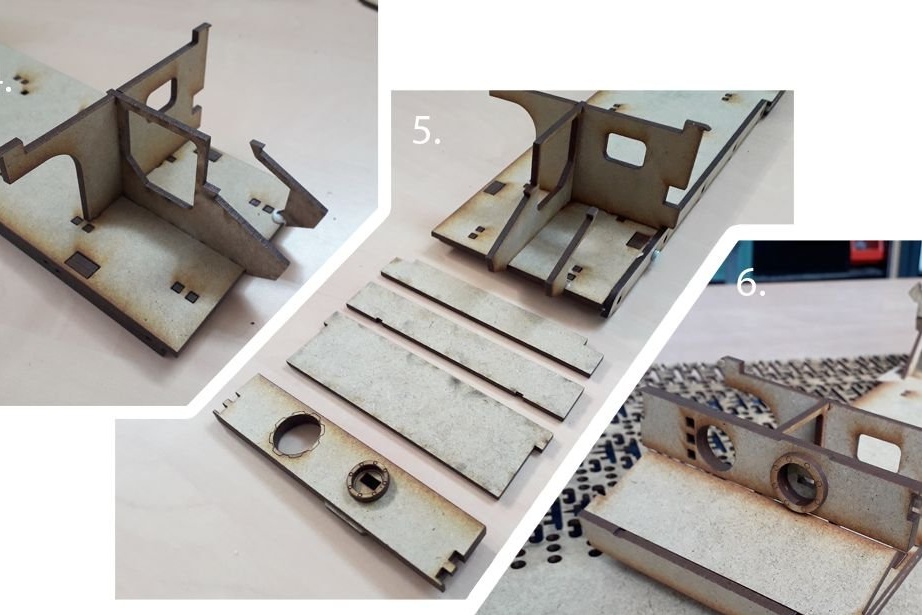
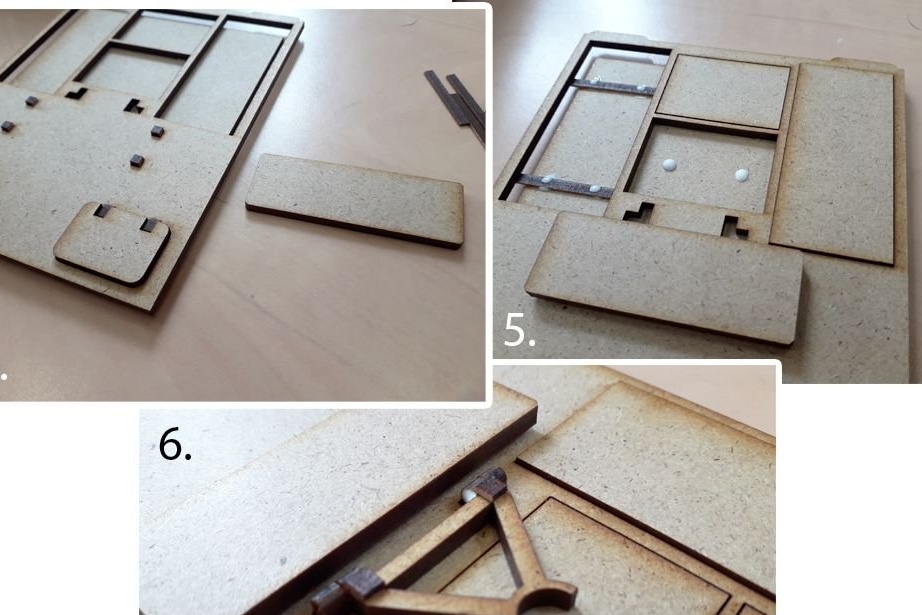
Krok piąty: z boku
Ramiona zawieszenia są zamontowane na ścianie bocznej. Jest przykręcany do podwójnego dna za pomocą śrub 15 mm za pomocą 4 nakrętek, które zostały przymocowane w pierwszym etapie.



Krok szósty: zawieszenie
Montuje i instaluje elementy zawieszenia. Wszystkie kroki są szczegółowo odzwierciedlone na zdjęciach. Nałóż trochę kleju na końce sprężyn w celu zamocowania. Wewnątrz sprężyn ustawia się kawałki wykałaczek. Zapobiegnie to wypadaniu sprężyn.

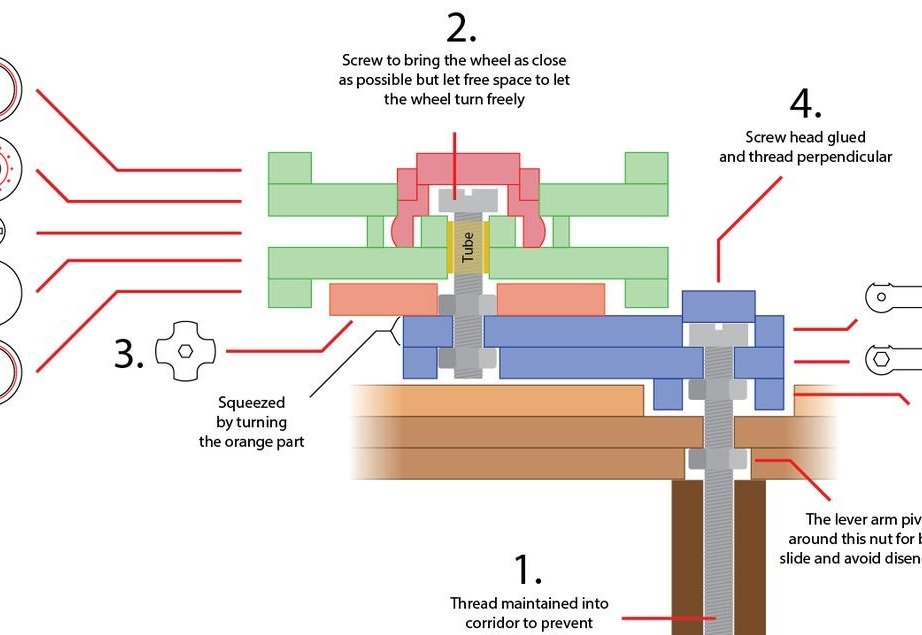
Montuje i montuje przednie dolne koło. W piaście koła zamontowana jest mosiężna rura i śruba 20 mm. Następnie piastę zamyka się korkiem.
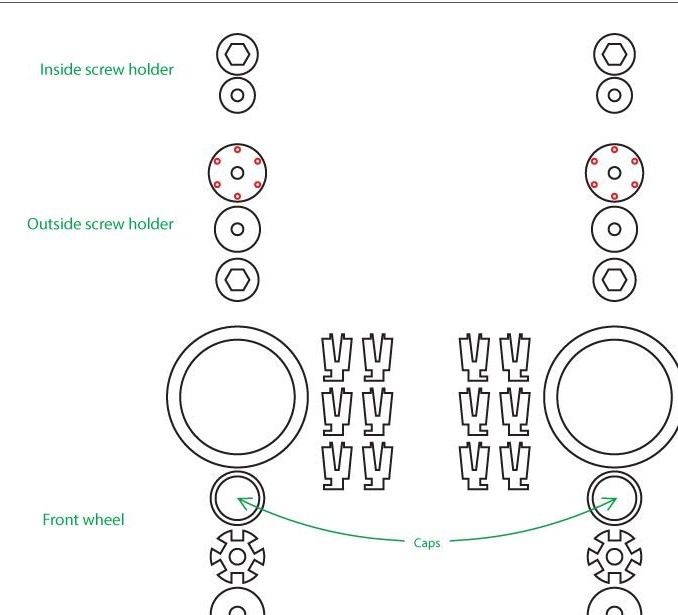

Montuje i instaluje raczej koło.


Montuje i montuje koła napędowe. Koła te zostaną podłączone do silników zainstalowanych w zbiorniku zbiornika.
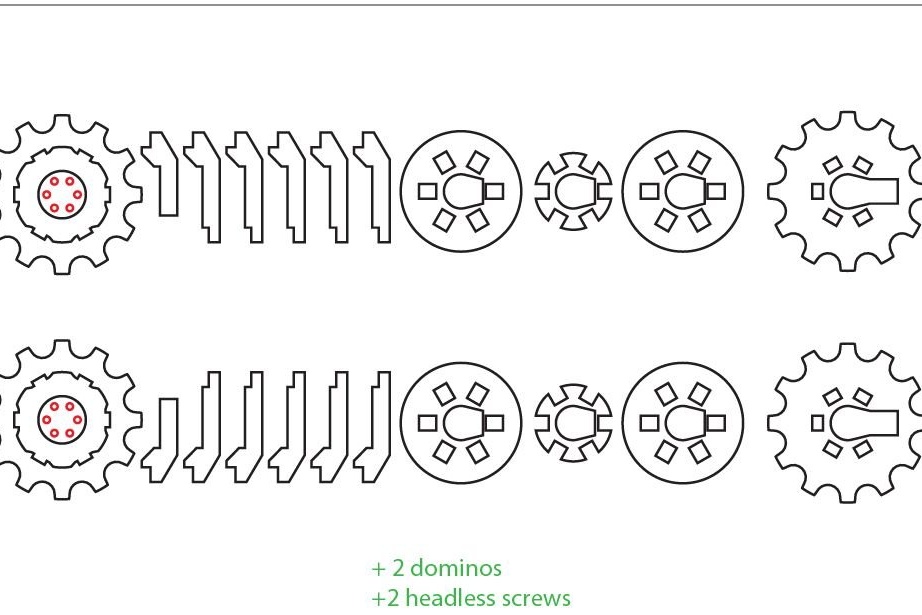
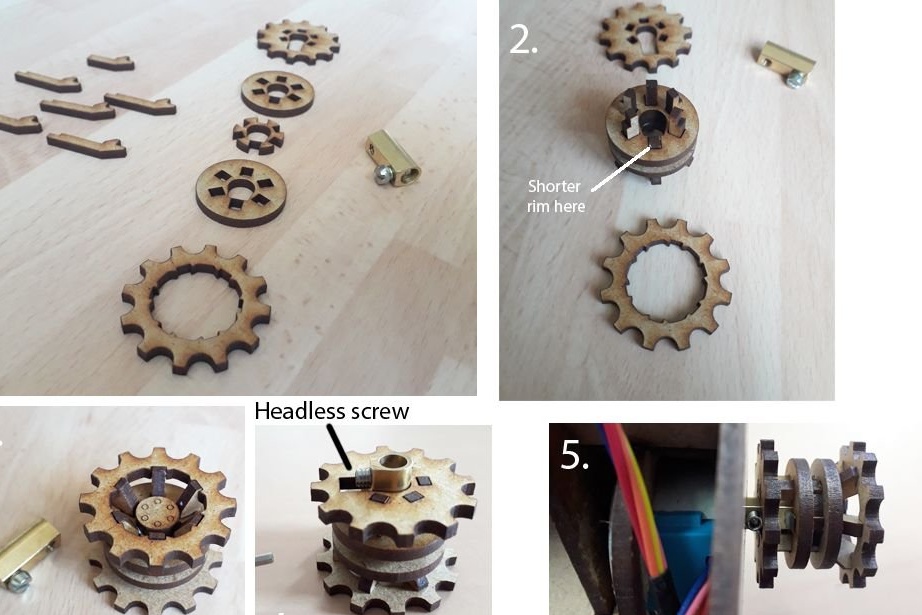
Instaluje korki na kołach.

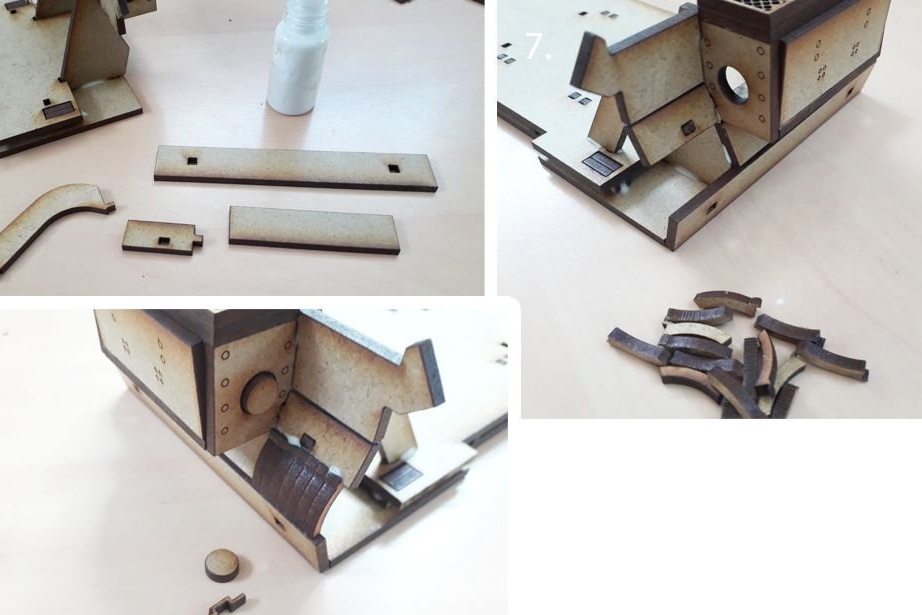
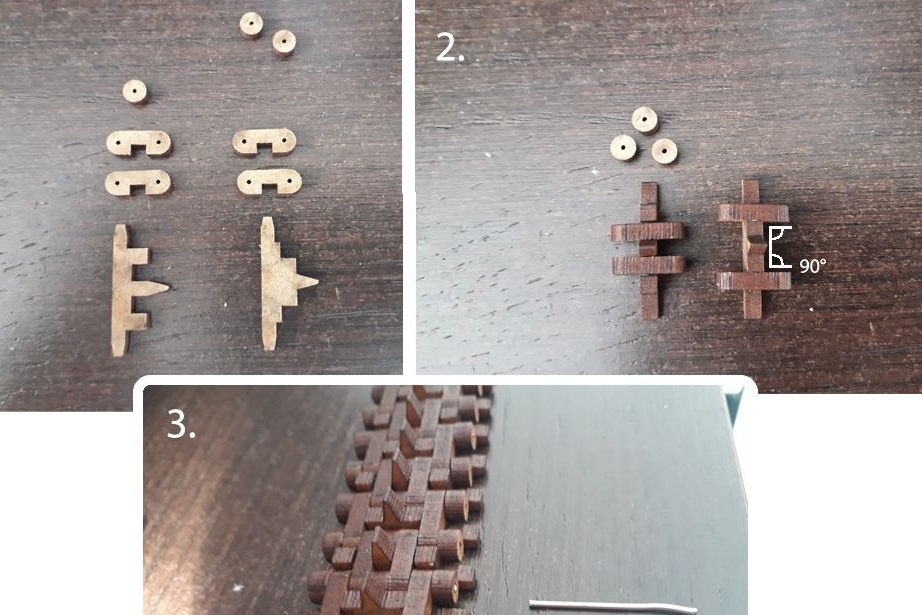
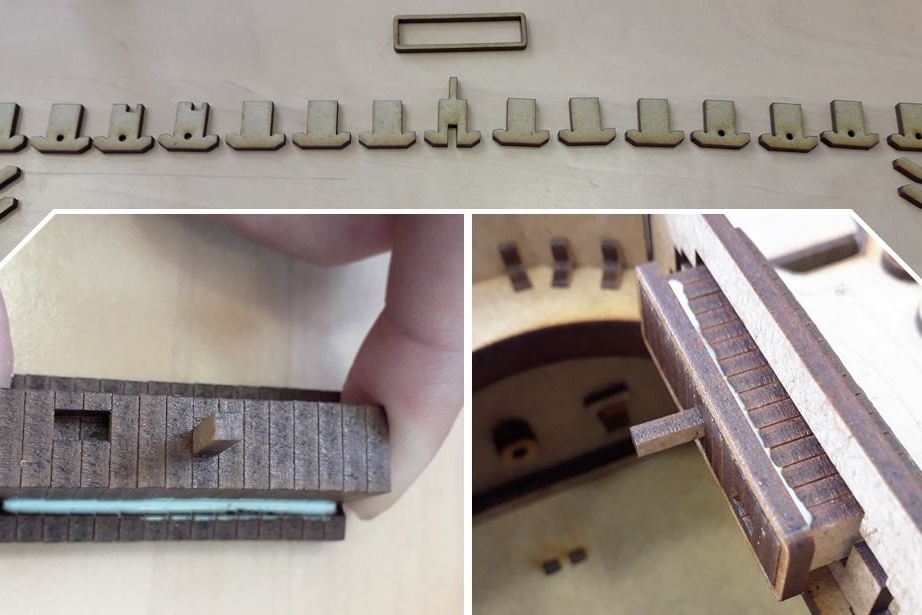
Krok siódmy: Śledź
Zbiera gąsienice. Gąsienice są mocowane razem cienkim drutem. Po bokach drutu zamocowane są zaślepki.
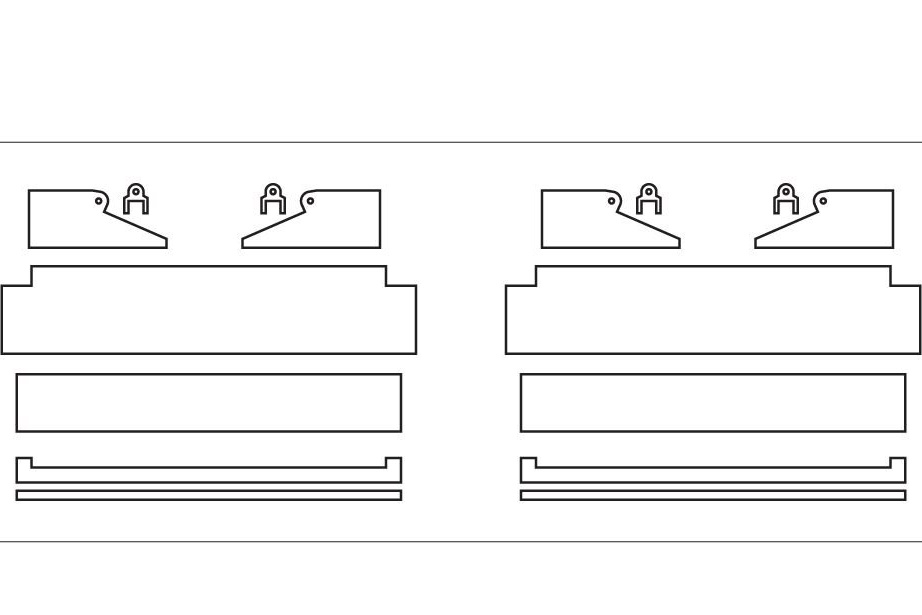
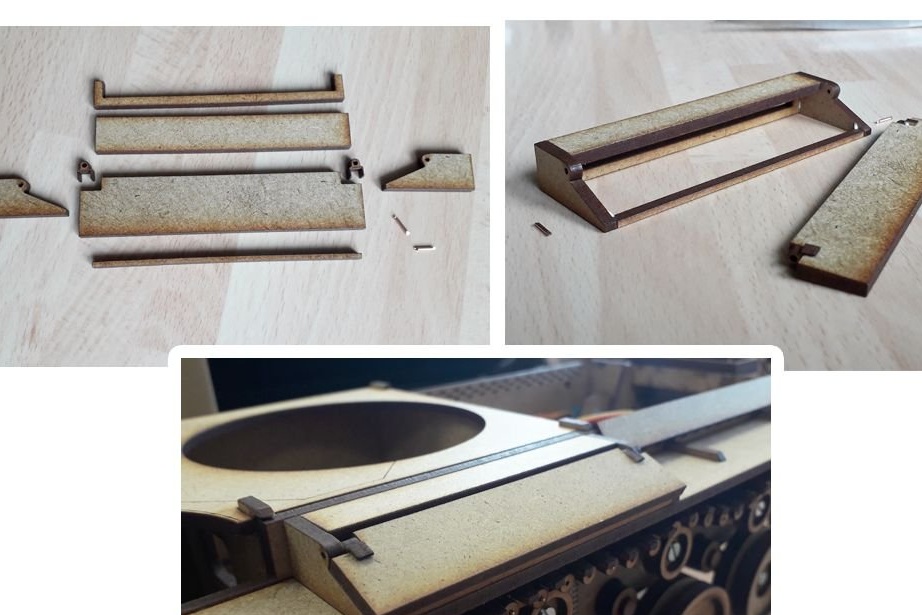
Krok ósmy: Ochrona przed brudem i szuflada
Instaluje tarcze. Przód klap jest ruchomy i można go podnieść.


Ustawia szufladę. Jako pętle instalowane są kawałki drutu.
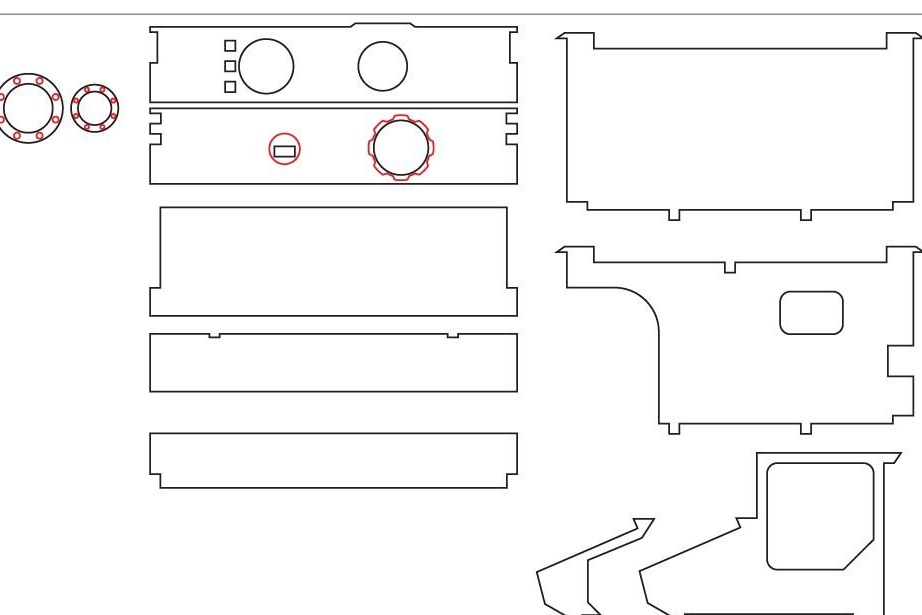
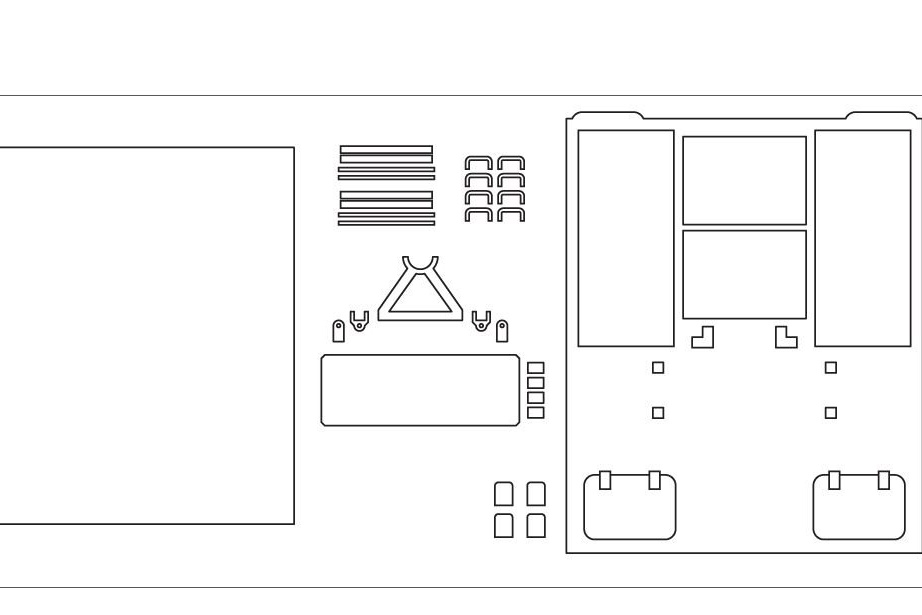
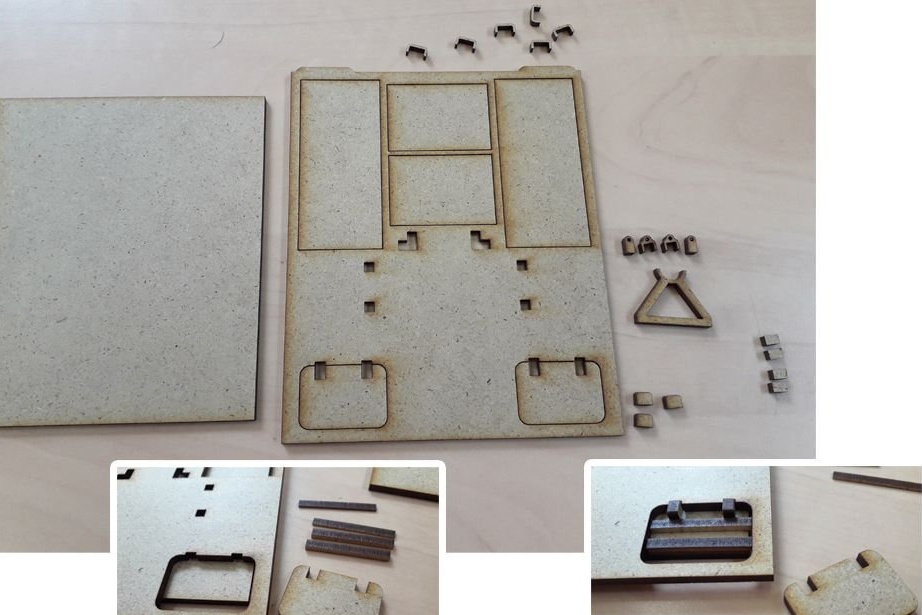
Krok dziewiąty: z powrotem
Ta część znajduje się za wieżą i obejmie całość elektronika.
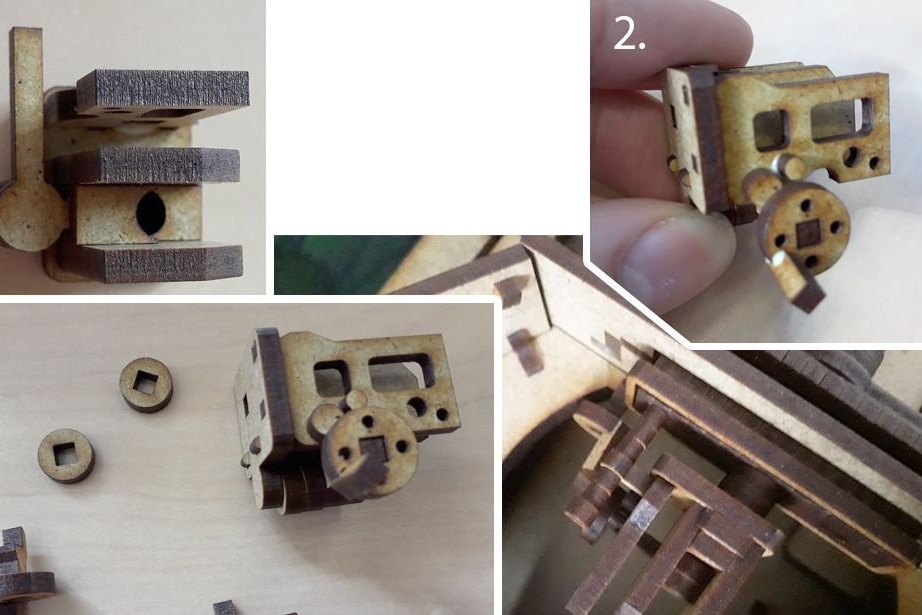
Krok dziesiąty: Wieża
Zbiera szczyt wieży i ściany boczne.
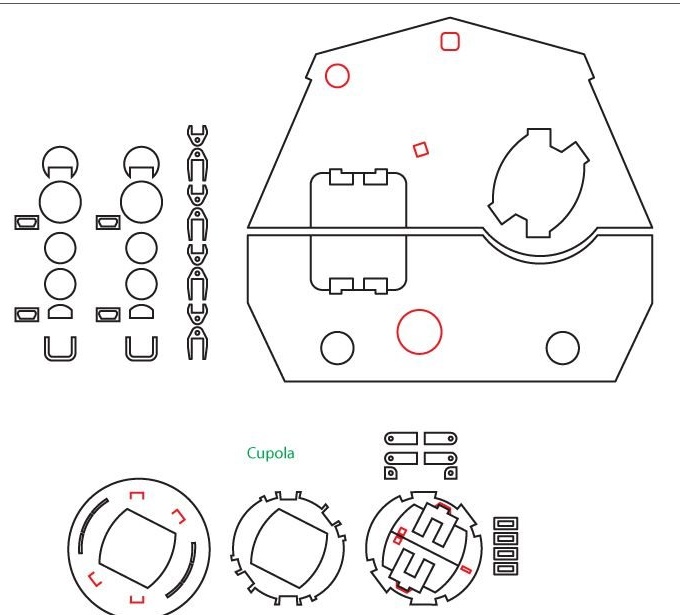
Klei mocowanie pistoletu.
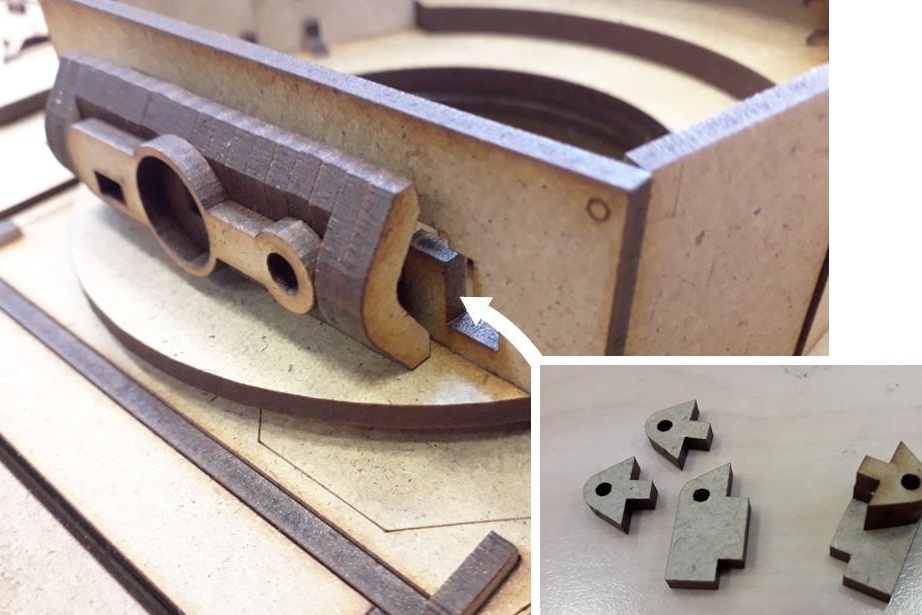
Ustawia wewnętrzny uchwyt i mechanizm sterowania pistoletem.
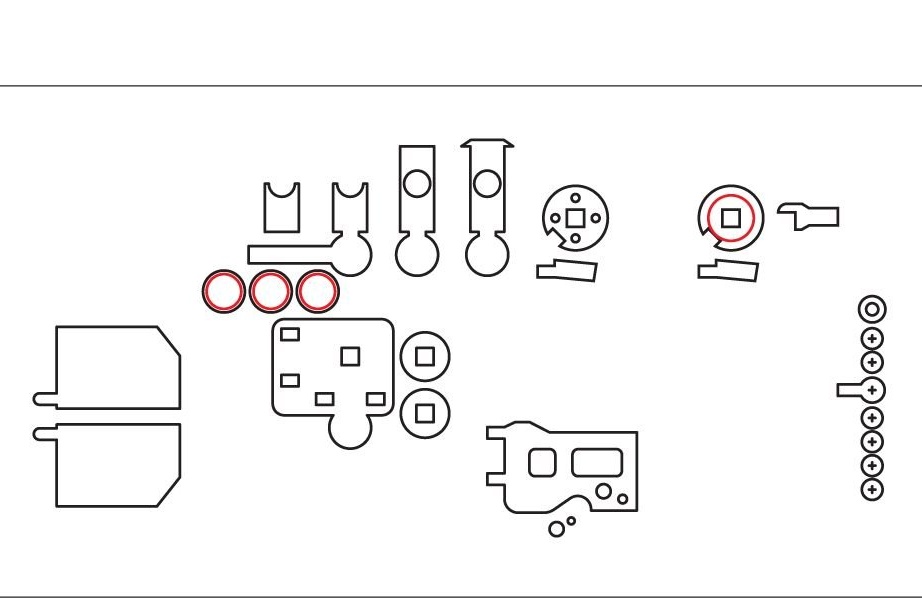

Krok jedenasty: pistolet
Zbiera broń, a główna broń to metalowy pręt. Pozostałe szczegóły są na nim narysowane.

Krok dwunasty: Małe szczegóły
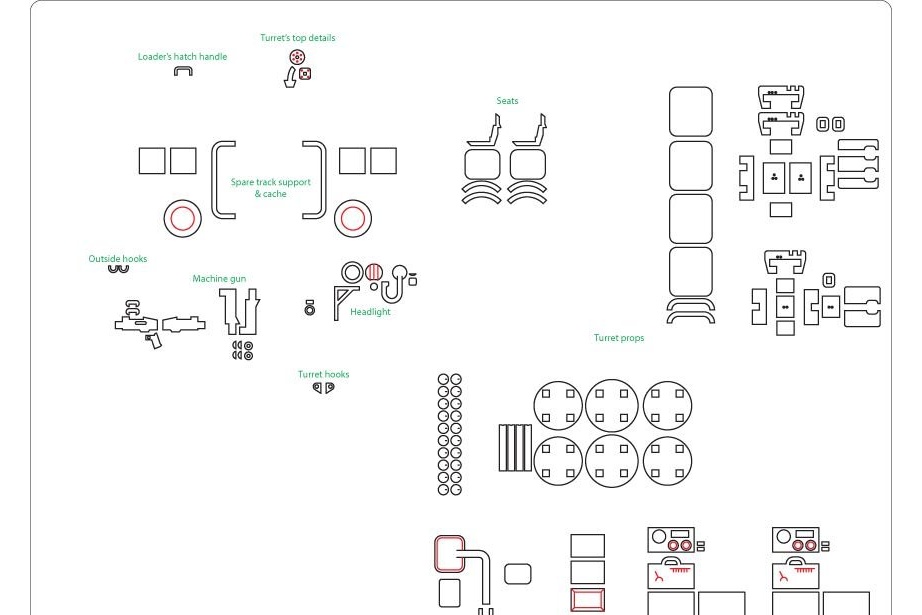
Zabezpiecza małe części zbiornika.
Wewnątrz po lewej stronie znajduje się siedzenie i karabin maszynowy, na zewnątrz lufy karabinu maszynowego.
Bezpośrednio na siedzeniu kierowcy: siedzenie, dźwignie sterujące i pedały, szyberdach.
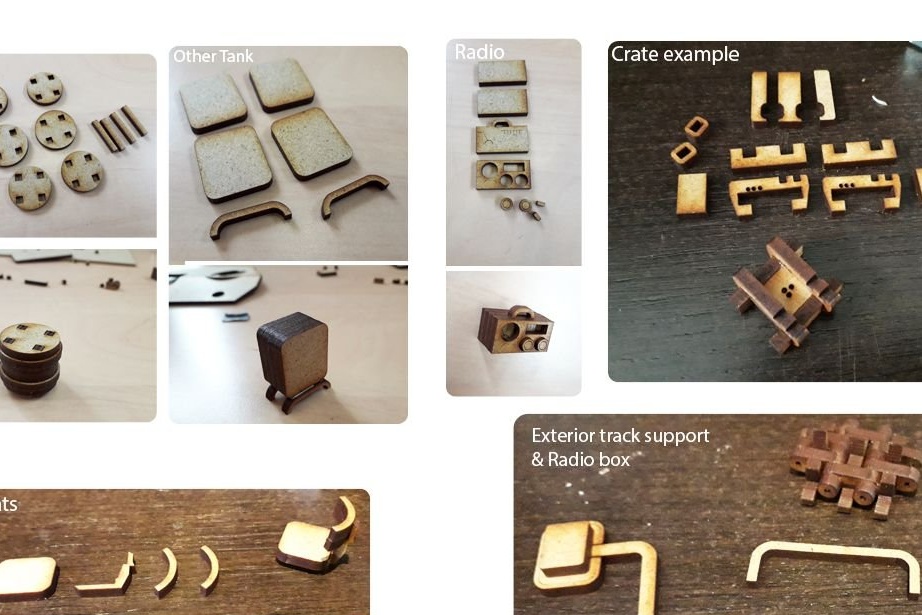
Na zewnątrz: haki, reflektory, skrzynie, amunicja, lina stalowa itp.
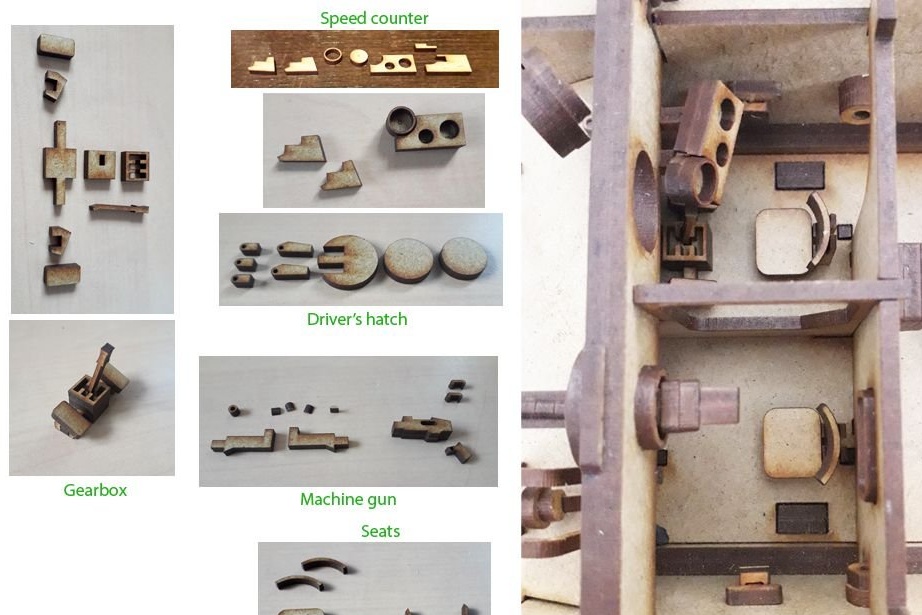

Zbiornik pod wodą jest przymocowany do wieży, krótkofalówka wewnątrz wieży.

Krok trzynasty: elektronika
Instaluje silniki. Instaluje część elektroniczną zgodnie ze schematem.
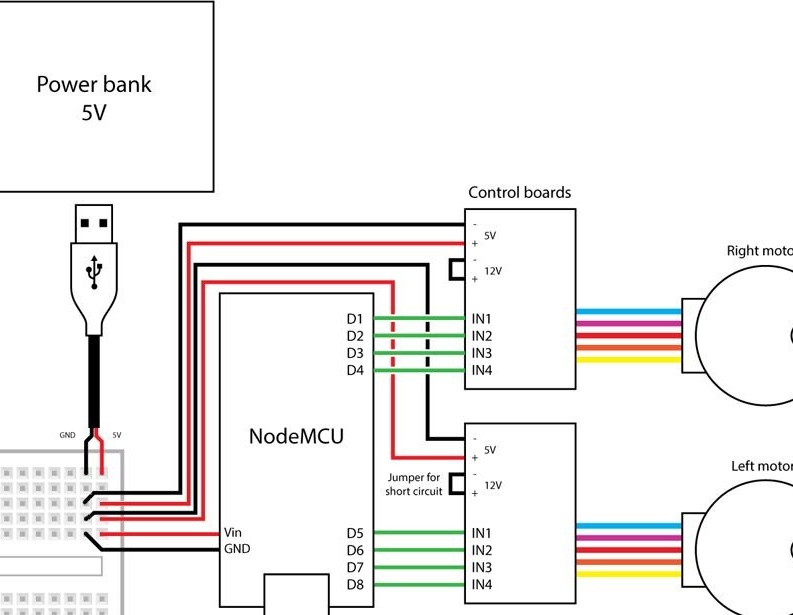

Do sterowania bezprzewodowego wybrałem kontroler NodeMCU. Model jest kontrolowany przez NodeMCU i aplikację Blynk (dostępną na Androida / iOS). Ta aplikacja zapewnia w pełni konfigurowalny HUD do sterowania z dowolnego Arduino lub telefon z iOS przez Wi-Fi.
Po zainstalowaniu aplikacji pierwszą rzeczą do zrobienia jest utworzenie konta.
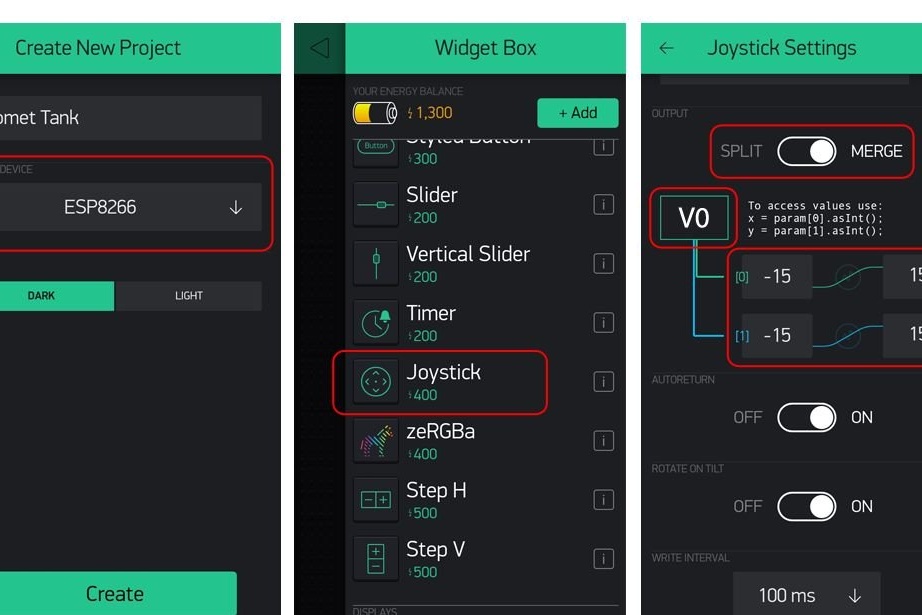
Utwórz nowy projekt i przypisz ESP8266 (układ NodeMCU) jako mikrokontroler i ustaw tryb WiFi.
Jak tylko zobaczysz swój interfejs, utwórz joystick. Wyślij informacje o joysticku na wirtualny pin V0 węzła.
Po utworzeniu joysticka kliknij go, aby otworzyć jego ustawienia. W pozycjach X i Y ustaw zakres od -15 do 15.
Zainstaluj biblioteki.
Najpierw pobierz bibliotekę Stepper2 tutaj: https://github.com/udivankin/Stepper2
Ta biblioteka jest dobrą opcją dla tanich silników krokowych, takich jak ten, z którego korzystał mistrz. Lepiej zarządza fazami silnika i zapewnia lepszy moment obrotowy. Po pobraniu pliku .zip zainstaluj go z oprogramowania Arduino: Szkic> Dołącz bibliotekę> Dodaj bibliotekę .ZIP ... i wybierz go.
Następnie, jeśli nigdy wcześniej nie sflashowałeś NodeMCU, potrzebujesz komputera, aby go rozpoznać. Arduino IDE ma menedżera płyty, na którym są zainstalowane prawidłowe sterowniki.
Skopiuj następujący wiersz:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonOtwórz ustawienia i wklej je do adresów URL. Zapisz ustawienia i przejdź do menedżera kontrolera w Narzędzia> Zarząd> Menedżer tablic. Karta ESP8266 musi znajdować się na końcu listy. Kreator wybrał wersję 2.5.0 z IDE w 1.8.9.
Potrzebujesz także biblioteki Blynk, którą znajdziesz w Sketch> Uwzględnij bibliotekę> Zarządzaj bibliotekami ... a następnie znajdź Blynk w polu wyszukiwania.
Przejdź do ustawień projektu i wyślij token na swój adres, który jest dużym ciągiem, który pozwala Twojemu telefonowi rozpoznać NodeMCU, gdy jest włączony. Skopiuj token z ostatnio otrzymanej poczty i wklej go do tablicy uwierzytelniania.
Teraz możesz zainstalować oprogramowanie wewnętrzne.
Comet.ino
Wszystko jest gotowe, teraz możesz cieszyć się pracą.