

Dzisiaj chcę porozmawiać o moim nowym domowej roboty. Mam nadzieję, że może to komuś pomóc. I tak
1. Krok pierwszy. Tło
Przez długi czas zamierzałem zbudować taki mechanizm. Studiował projektowanie kolei linowych innych rzemieślników, analizując mocne i słabe strony ich konstrukcji. Spojrzałem na zdjęcie tego, co i jak zbudować. Co najważniejsze, wszystko opierało się na zębatkach.
Było pytanie - gdzie je zdobyć?
Aż pewnego dnia żona poruszyła od dawna palący problem - stare pudełka zajmują dużo miejsca.
Kiedy otworzyłem jedną z nich, zobaczyłem swoją pierwszą drukarkę. Postanowiłem go rozebrać na części, może zmieści się w domu. Po demontażu miałem do dyspozycji kilka komponentów radiowych, wszelkiego rodzaju przełączniki, dwa silniki elektryczne i o mój boże - zestaw przekładni.

Zrobił maszynę do toczenia i wiercenia z jednego silnika, ale zostawił drugi z napędem pasowym na linę stalową.

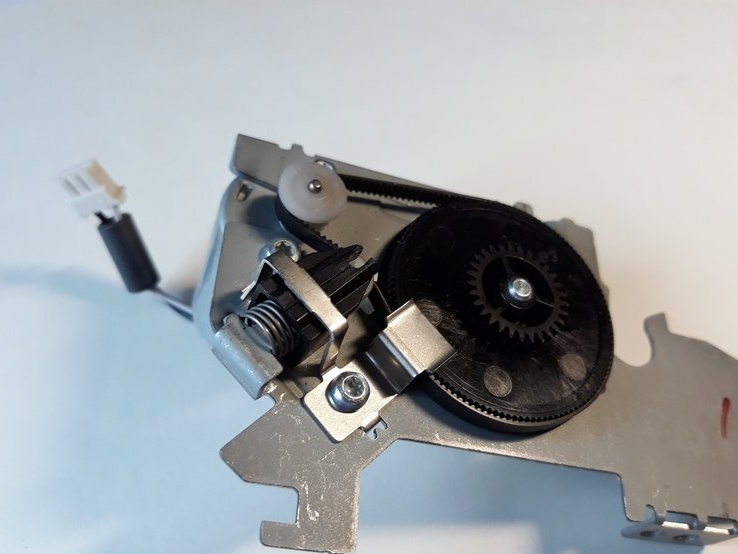
Koła zębate prawie wszystkie pasują do tego napędu.
2. Krok drugi. Nadszedł czas.
Zasadniczo nie minęło trochę czasu, ale miałem go, gdy byłem zaangażowany w korpus fregaty. Nawet gdy zabrał się do wiązania armat klockami, udało mu się przetrwać dzięki prostym wątkom.
Ale tutaj, że tak powiem, wyszedłem na otwartą przestrzeń. Czas wykonać takielunek w ciasnym, co oznacza, że potrzebujemy kabla, co oznacza, że nadszedł czas, aby naprawić kabel.
Siedział i zastanawiał się. Rozproszył swoje bogactwo, wykonał wstępne rysunki.

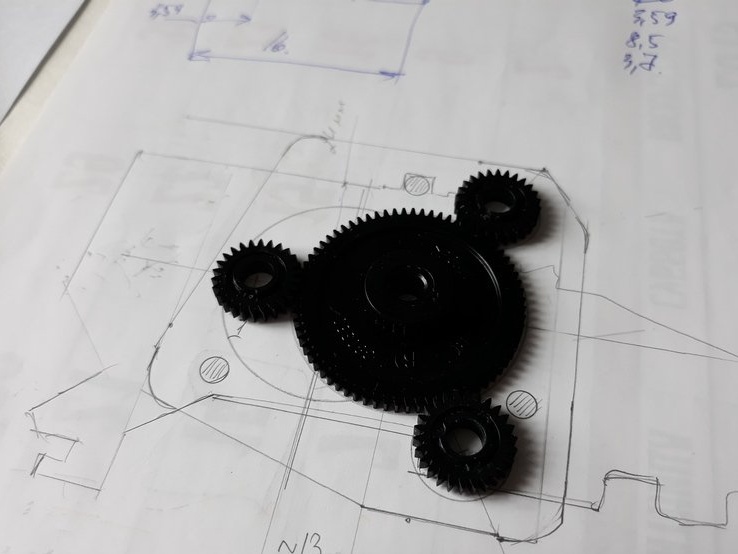
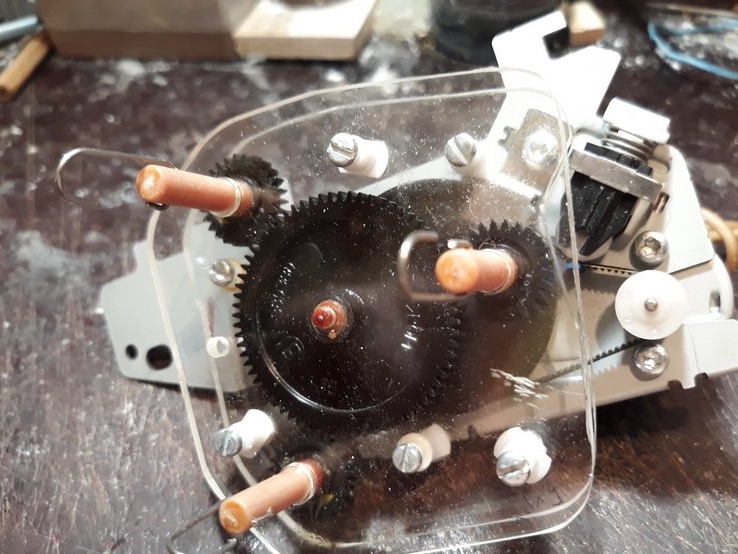
Wszystko wydaje się działać. Do istniejącego mechanizmu napędowego konieczne jest wykonanie dodatkowej skrzyni biegów z istniejących kół zębatych. Są to dwa dodatkowe panele (policzki) w pewnej odległości od siebie. Między którymi są biegi skrzyni biegów. Według rysunków zrobiłem policzki skrzyni biegów.

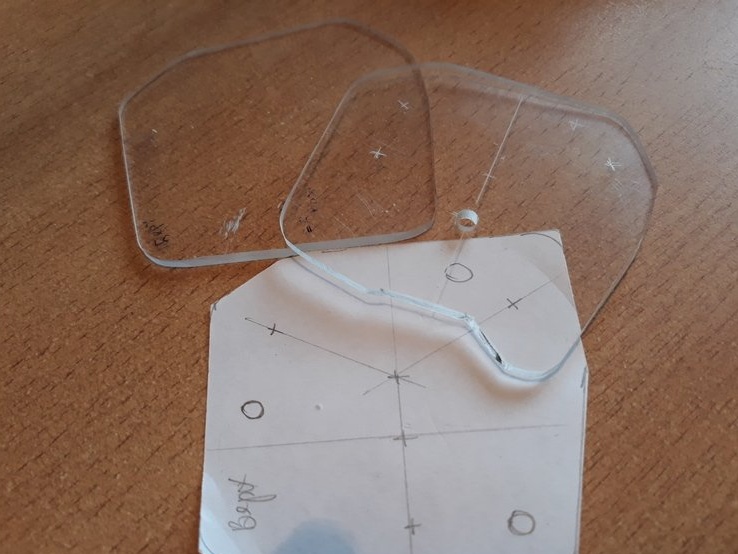
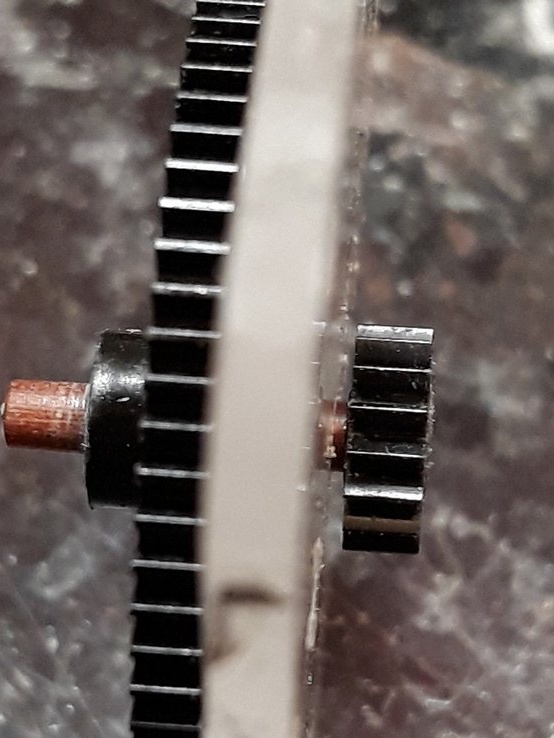
Aby połączyć pierwszy policzek z napędem głównym, obrobiłem tuleje dystansowe.

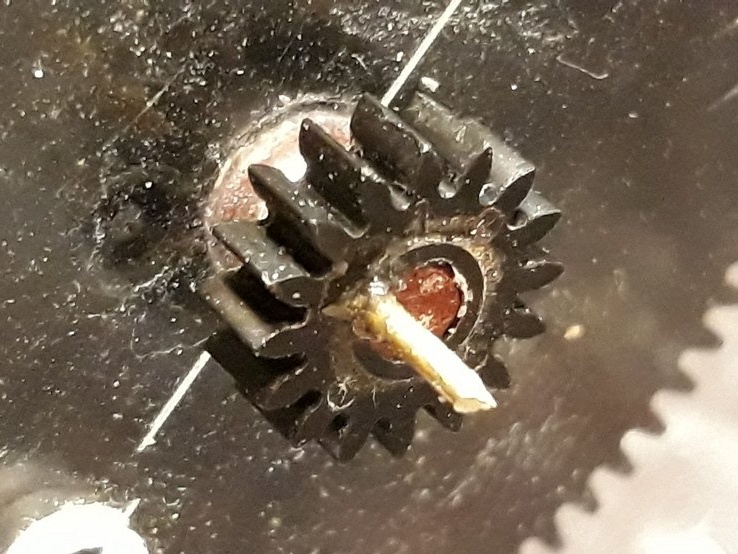
Między panelem napędowym a pierwszym policzkiem zainstalowałem pierwszy mały bieg, który będzie na tej samej osi, co duży bieg.

W pierwszym policzku zaznaczyłem i wywierciłem w tym celu otwór.

Oto bliższe spojrzenie.

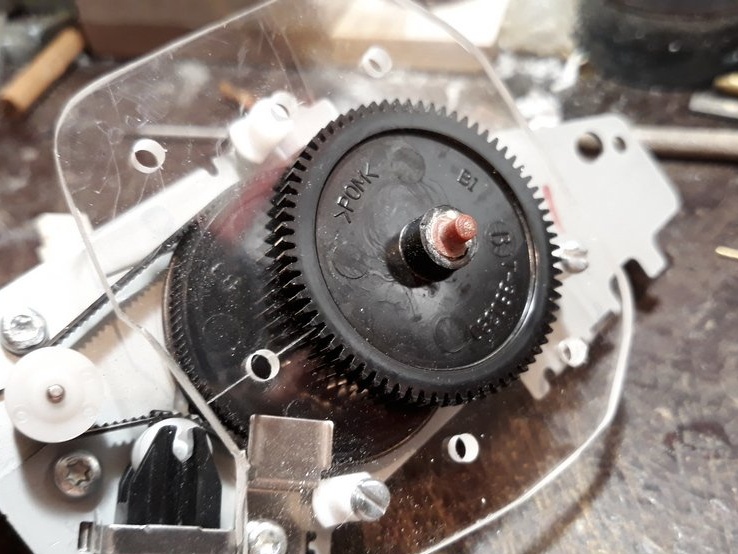
Następnie obrobił oś dla małych i dużych centralnych kół zębatych z płytki drukowanej. Zasadziłem i zabezpieczyłem duży sprzęt.


Następnie przeszedł przez policzek i zainstalował mały sprzęt, mocując go do osi za pomocą okrągłego klucza.


Okazało się, że tak
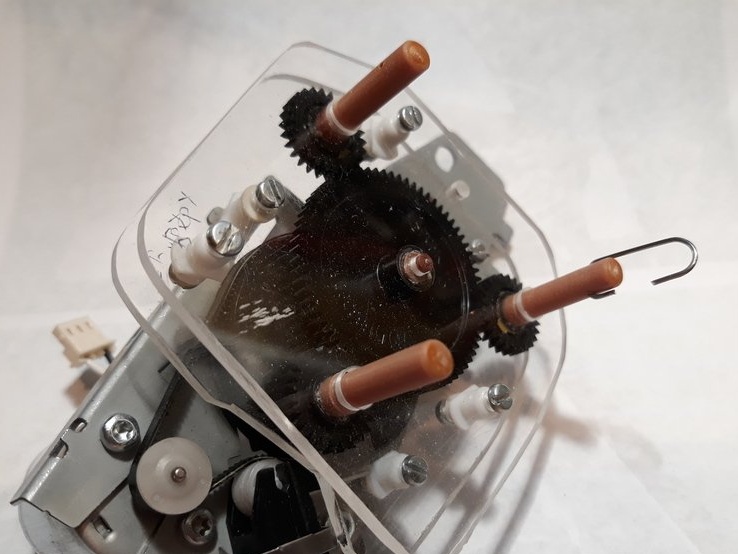
Następnie obrobił osie dla małych przekładni satelitów. Do których konkretnie zostaną przymocowane nitki (nici) przyszłej liny. Przed skręceniem ich w linę.
Satelity podwozia są również szczelne za pomocą kleju.


Następnie zostały dodatkowo przymocowane do wału za pomocą okrągłych wpustów.

Po ich rozebraniu, zainstaluj je na swoich miejscach.

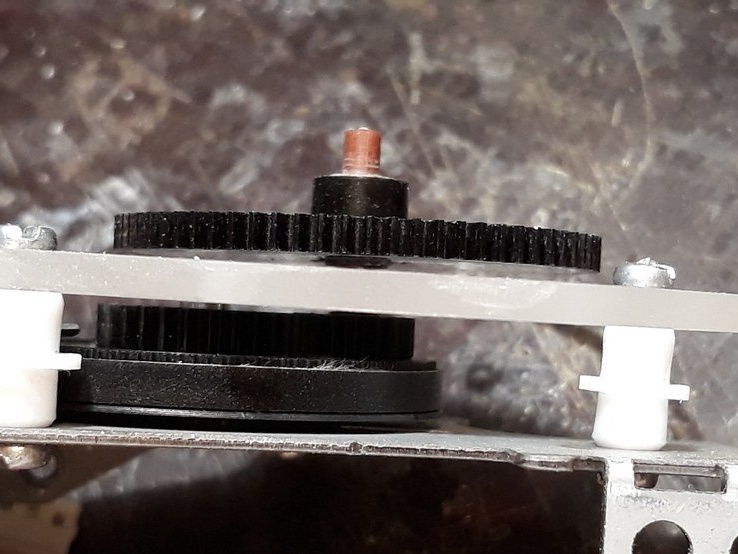
Następnie zamknął je drugim policzkiem skrzyni biegów przez tuleje dystansowe.
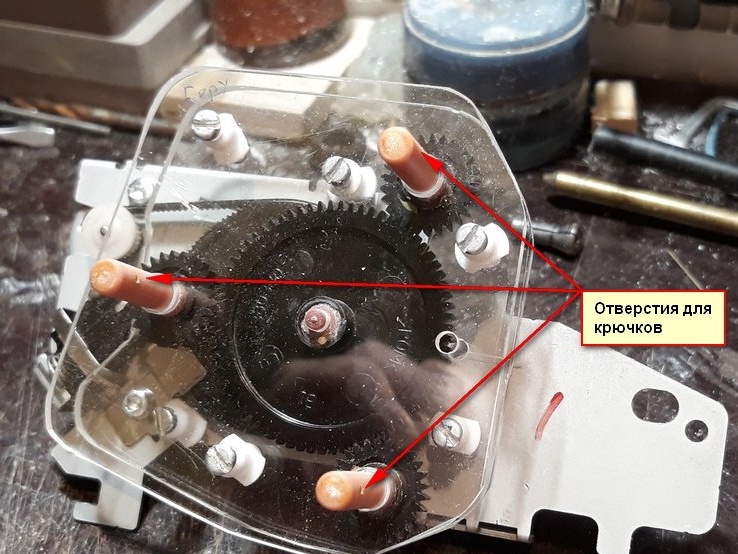
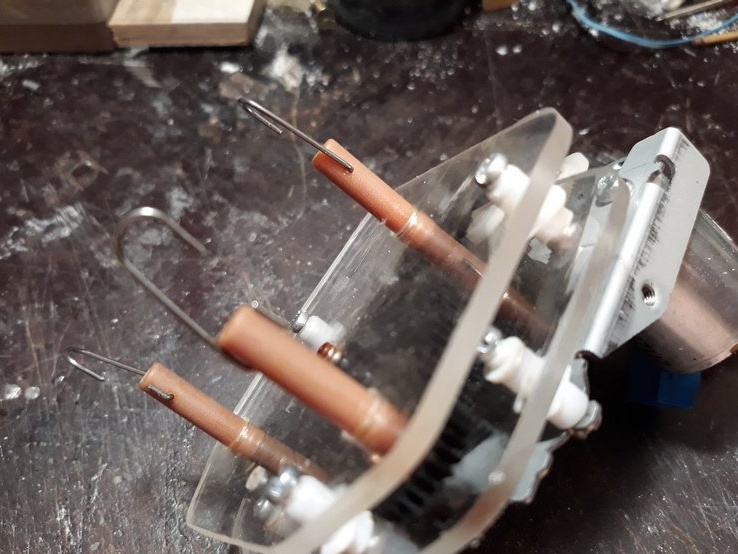
Otwory na haki zostały wstępnie nawiercone w osiach, na których zostaną zamocowane splotki linowe. Haki wygięte z spinaczy.
3. Krok trzeci. Początek rozwoju i pierwsze wnioski.
Tak więc nadszedł ekscytujący moment pierwszego włączenia urządzenia.
Kabel umieścił na górnej półce nad stołem roboczym w drzwiach swojego warsztatu.
Na szczęście właśnie tam, na dolnej półce, znajduje się zasilacz, z którego silnik elektryczny kabla będzie faktycznie zasilany. Napięcie silnika elektrycznego, które wynosi 12 woltów. Zasilacz ma płynną regulację mocy w zakresie 3 woltów.

I tak pierwsze włączenie.
Na hakach zawieszone pasma przyszłej liny, bezpośrednio na wykonanych z nich pętlach.


Poniżej na skrzyżowaniu pasm wisiał ładunek.

Włączone, wszystko działało, kręciło się ...
Ale, jak mówią, pierwszy naleśnik jest nierówny.
Lina wydaje się być, ale jakoś zgarbiona.
Zacząłem rozumieć, o co chodzi, i ponownie przeczytałem rekomendacje znalezione w Internecie. I mam to. W pośpiechu nie wziąłem pod uwagę kierunku nawijania nici. Najpierw muszą być skręcone na kablu w tym samym kierunku, w jakim były początkowo skręcone. I mam jedno pasmo zostało zawieszone na haku kabla, wręcz przeciwnie. Dlatego rozwinęła się podczas nawijania liny, podczas gdy dwa pasma nadal się skręcały.
Aby nici liny nie zaplątały się podczas nawijania, wykonałem drążek dystansowy. Zerknęła na urządzenie w Internecie.

Wydawało mi się, że łatwiej i szybciej jest to zrobić niż ostrzyć zdalny pocisk (stożek) na tokarce. Po kilku próbnych testach okazało się, że pręt ma możliwość odejścia od pozycji poziomej i stania na krawędzi. Co stworzyło pewne problemy podczas pracy z nią. Poprawiłem trochę, dodając prowadnice do pasm.

Ale to też nie pomogło.
Potem postanowiłem wyrzeźbić stożek.

Próbowałem z nim pracować. Im bardziej pracowałem nad kablem, opanowując mądrość pracy z nim, coraz bardziej byłem przekonany, że drążek i stożek były zbędnymi detalami. Łatwiej było uniknąć splątania nici liny lewą ręką rozłożonymi palcami.
Co więcej, prawy utrzymywał ładunek przed obrotem, dopóki nie został podniesiony na wysokość około 1/10 długości zwijanej liny. Następnie Trosomot zatrzymał się (wyłączył), ładunek został zwolniony i nastąpiło zwijanie liny. Nie możemy tutaj pominąć momentu zatrzymania obrotu ładunku i zmiany jego kierunku obrotu. W tym momencie ładunek był utrzymywany ręcznie, a zamki były mocowane za pomocą „drugiego” kleju. Następnie w górnej części liny na skrzyżowaniu pasm zrobiono to samo.
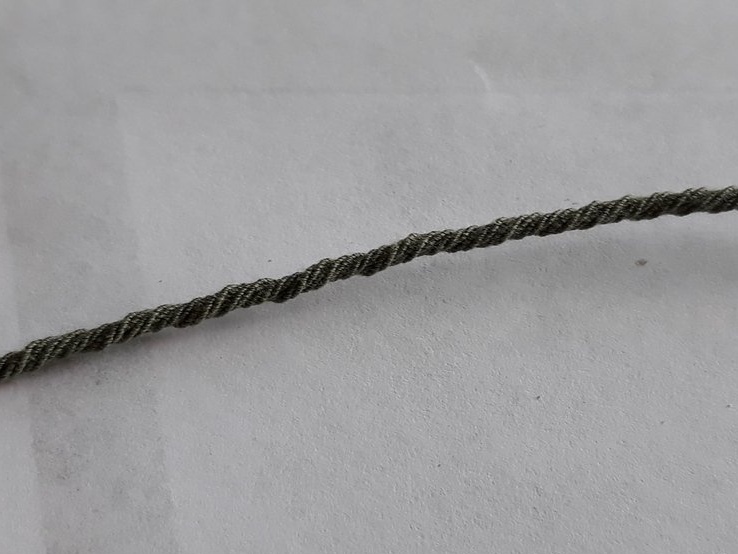
Oto wynik pracy.

Próbowałem różnych opcji uzwojenia. Odnosi się to do uzwojenia z jednym pasmem (1X3), dwoma pasmami (2X3) i trzema pasmami (3X3).




Jestem zadowolony z rezultatu wykonanej pracy.
4. Czwarty krok. Wniosek
Przed budową Trosomotu pomyślałem, że uczynię go tak wygodnym, jak to możliwe ...
Wyjaśniam przełączanie kierunku obrotów Trosomot i tak dalej itd. ... ... aż do zdalnego włączania i wyłączania samego Trosomot.
Ale kiedy go zmontowałem, uruchomiłem go i działałem.
Zasadniczo rozumiane, to po prostu nie jest konieczne. Wykonuje powierzone mu obowiązki i wykonuje się dobrze.
Wszystko jest testowane.
W ten sposób dostałem kolejne „zbłąkane” hobby. I nie żałuję tego.
Cóż, to wszystko.
Zobacz, krytykuj, doradzaj, pytaj.
Pozdrawiam, Starp.