

W tym artykule omówiono produkcję proporcjonalnego radiowego urządzenia sterującego Arduino. Ciekawą cechą tego projektu jest to, że sprzęt został pomyślany jako alternatywa dla sprzętu „dla dorosłych”, ale który można wykonać samodzielnie. Na nadajniku znajdują się przyciski przycinania, które są ważne na przykład dla kontroli modele w samolocie nadajnik jest również wyposażony w mały wyświetlacz z organicznymi diodami LED, który wyświetla podstawowe informacje o działaniu nadajnika. Sprzęt jest przeznaczony dla 6 kanałów, 4 proporcjonalnych i 2 dyskretnych. Autor położył również podwaliny pod przyszłe dodanie dwóch proporcjonalnych kanałów, do obudowy dodano 2 potencjometry, ale w tej chwili nie są one zaangażowane. Niemniej jednak wystarczy to do sterowania modelem samolotu, statku lub samochodu, a dyskretne kanały pozwolą kontrolować dodatkowe obciążenie, na przykład włączenie reflektorów, świateł pokładowych, świateł nawigacyjnych, a nawet wystrzelić małe pociski. Sprzęt ma dwa tryby sterowania - liniowy i wykładniczy.
Do nadajnika potrzebne będą:
1 x Arduino NANO / UNO / ProMini
1 x płyta ochronna BMS dla trzech puszek litowo-jonowych
Złącze 1 x 5,5 x 2,1 mm
1 x przetwornica DC / DC Step Up XL6009
1 x LM2596 mały konwerter obniżający (omówię to osobno)
3 x 18650:
2 x joysticki JH-D202X (sprzedawane na Ali)
2 x przełącznik dwustabilny
1 x ekran OLED i2c 0,96 cala 128 x 64
1 x moduł radiowy NRF24l01 ze wzmacniaczem i anteną
9 x przycisk taktowy 6 * 6 * 5 mm
Rezystory wyjściowe (patrz schemat)
Do odbiornika potrzebujesz:
1 x Arduino NANO / UNO / Pro Mini
1 x moduł radiowy NRF24l01
1 x regulator napięcia 3,3 V AMS1117
30 x grzebienie PLS
1 x deska do krojenia chleba
1 x kondensator 10 uF
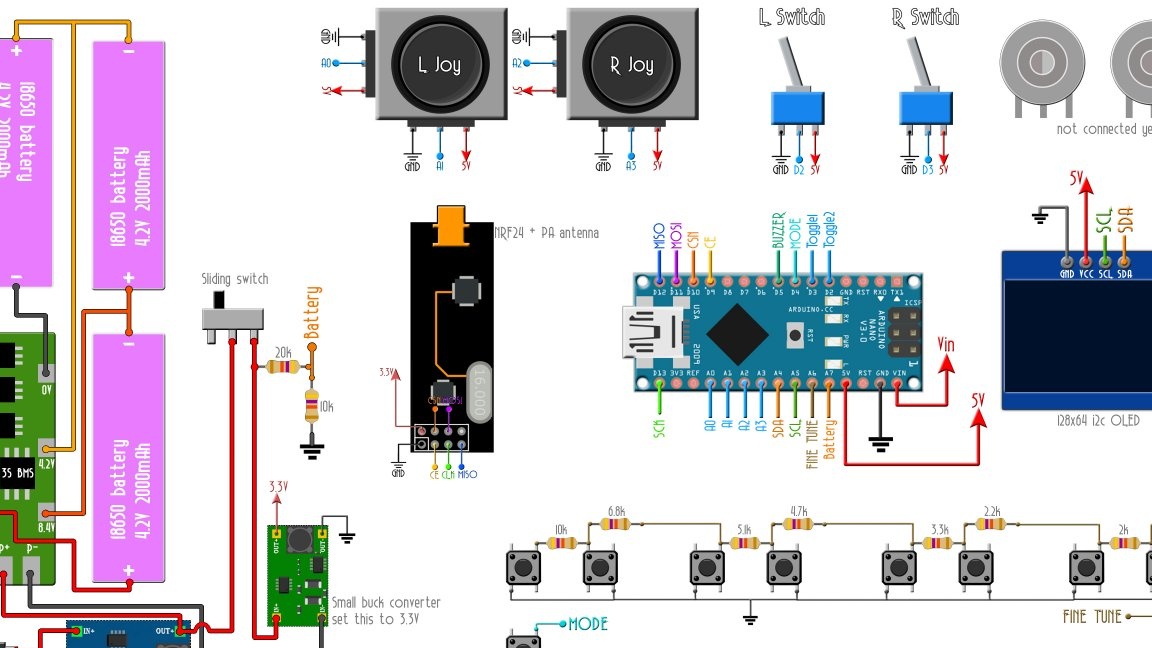
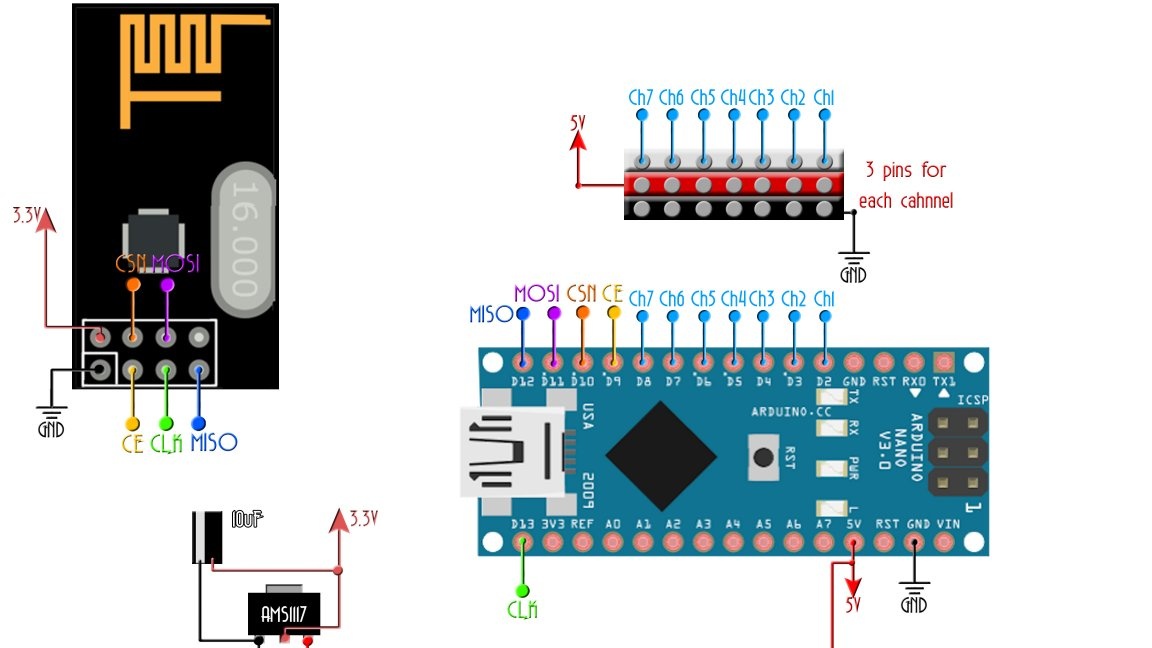
Poniżej znajduje się graficzny obraz wszystkich komponentów i schemat ich połączenia. Przed montażem należy skonfigurować konwertery buck, XL6009 na 12,6 V (ten moduł jest odpowiedzialny za ładowanie), LM2596 na 3,3 V (zasilanie modułu radiowego). Zamiast LM2596 teoretycznie możliwe jest użycie ASM117, zgodnie z arkuszem danych, maksymalne napięcie wejściowe tego stabilizatora wynosi 15 V, ale zaleca się, aby nie stosować go powyżej 12 V. Najwyraźniej na podstawie tych rozważań autor zastosował inny konwerter DC / DC. Zamiast tego można również użyć regulowanego stabilizatora, na przykład LM317.
Obudowa
Obudowa składa się z dwóch głównych części: górnej i dolnej. Ponadto drukowanych jest 9 przycisków (8 przycisków przycinania i jeden przycisk trybu), 5 kopii zapasowych przycisków, ramka wyświetlacza i suwak zasilania.Autor wydrukował PLA z gumką z 20% pokryciem, dyszą 0,4 mm i wysokością warstwy 0,3 mm. Nawiasem mówiąc, nikt nie zabrania korzystania z innej skrzynki, możesz po prostu wziąć odpowiednie pudełko, skleić go samodzielnie lub wziąć dość dużą skrzynkę z chińskiej zabawki, są one prawie sprzedawane w torbach na sklasyfikowanych stronach.
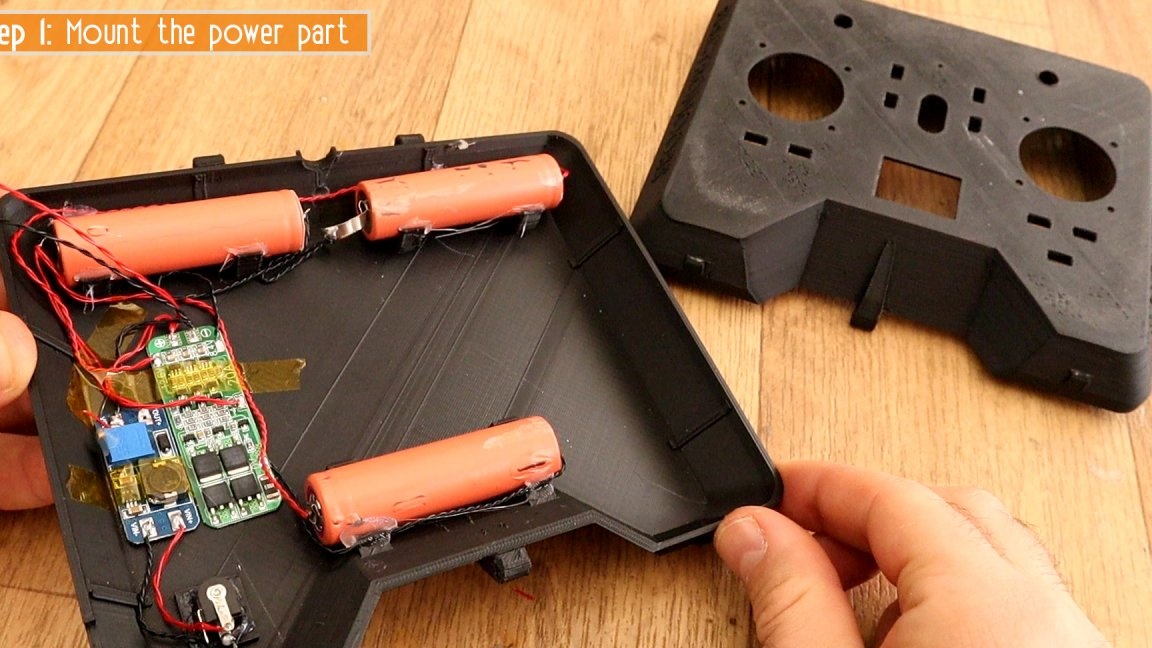
Montaż przetwornika
Baterie są połączone szeregowo. Autor zrobił to przez lutowanie, chcę zauważyć, że lutowanie puszek 18650 wymaga pewnych umiejętności, więc jeśli nie masz takiego doświadczenia, kup baterie z już spawanymi płatkami i przylutuj do nich. Ponadto baterie zgodnie z powyższym schematem są przylutowane do modułu BMS, którego wejście zasilane jest napięciem z konwertera XL6009 (zamiast tego można użyć MT3608). BMS odpowiada za równomierne ładowanie / rozładowywanie wszystkich puszek i wyłączanie zasilania po wyczerpaniu akumulatorów. Napięcie można również monitorować za pomocą wyświetlacza. Akumulatory są ładowane za pomocą zasilacza 9 V o prądzie nie większym niż 3 A (maksimum dla XL6009). W rzeczywistości prąd ładowania należy obliczyć w zależności od pojemności akumulatorów i wziąć zasilacz z nieco niższym prądem lub go ograniczyć. Wygodne jest montowanie modułów w obudowie za pomocą dwustronnej taśmy „samochodowej”.
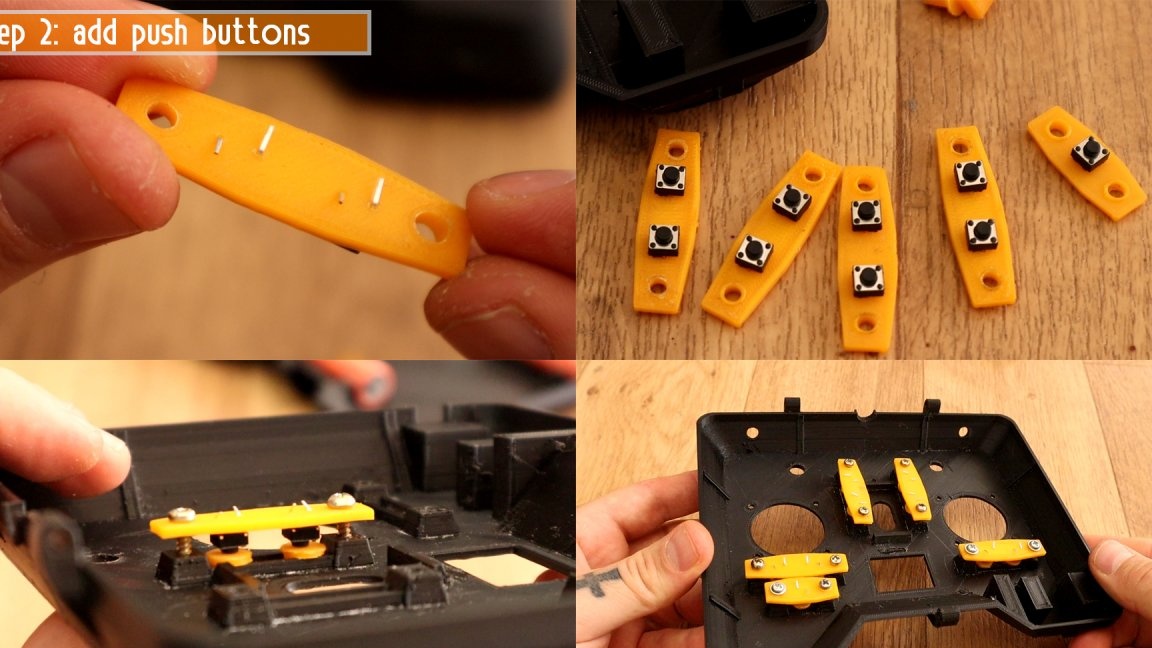
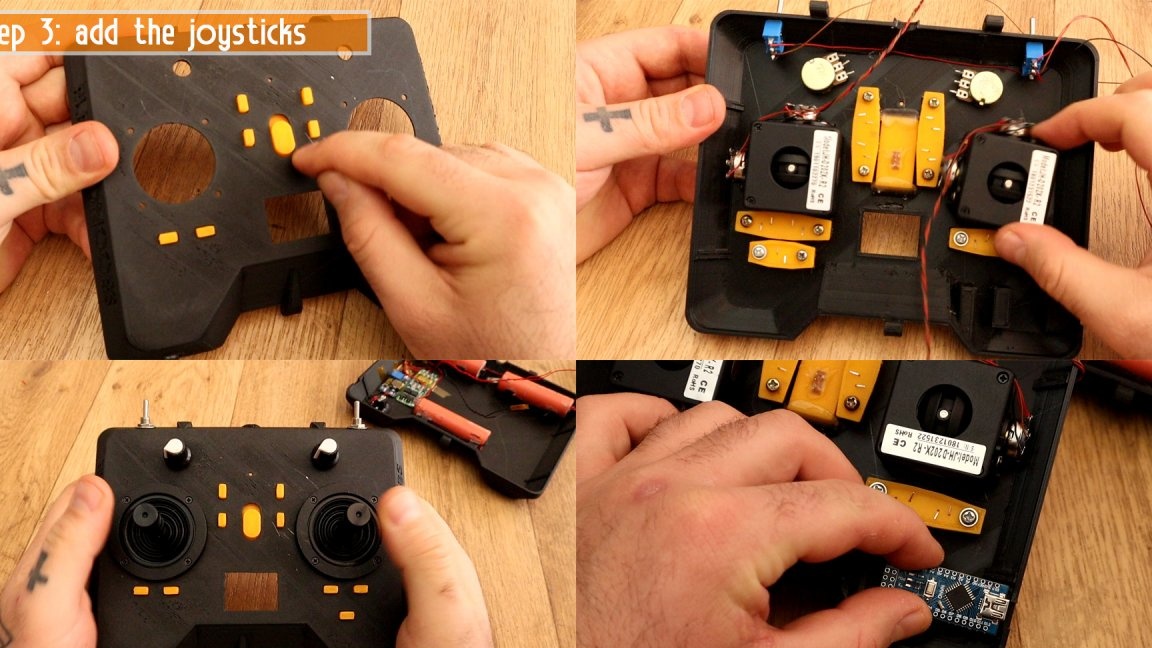
Przyciski zegara są instalowane na specjalnych platformach, po czym są przymocowane za pomocą małych śrub do odpowiednich wsporników wewnątrz obudowy. Tutaj wszystko jest na poziomie projektanta i jest dobrze zrozumiane na zdjęciu.
Przyciski są połączone rezystorami, co w zasadzie pozostawia małą klawiaturę rezystancyjną, co pozwala na użycie tylko jednego styku karty Arduino. Przewody są przylutowane do potencjometrów joysticka, skrajne przewody prowadzą do uziemienia, a 5 V, średnie przewody do odpowiednich pinów Arduino. Mam plany powtórzenia tego schematu, już trochę eksperymentowałem i mogę powiedzieć, że kod ma funkcję automatycznego odwracania kanałów w razie potrzeby, ale jeszcze nie zrozumiałem, w jaki sposób schemat określa tę potrzebę. To znaczy, że inwersja kanałów jest zasadniczo przeprowadzana przez lutowanie ekstremalnych wniosków w niektórych miejscach. Takie joysticki w momencie pisania są sprzedawane w Ali w cenie około 7 USD za sztukę, niezależnie od tego, czy zależy to od Ciebie, czy nie. Zamiast tego możesz użyć modułów joysticka dla arduino lub joysticków kontrolerów gier.
W rzeczywistości joystick działa jak dzielnik, odchylając uchwyt, zmieniamy napięcie na środkowej mocy potencjometru, aw zależności od tego napięcia arduino określa odchylenie.
[centrum] [/ centrum]
Tumblery są również podłączone. Przełączniki są potrzebne do włączania i wyłączania, ponieważ kanał jest dyskretny i ma tylko dwie wartości - 0 lub 1, w zależności od tego, czy wyjście arduino jest przyciągane do ziemi, czy do źródła zasilania 5 V. Ponadto przełącznik włączania jest konieczny, jeśli zostawisz wyjście „wiszące w powietrzu”, co by się stało przy użyciu trzech pozycji, kontroler nie rozumie, co się dzieje, a wartość losowo przeskakuje 0 lub 1 (z mojego doświadczenia). Nie można ustawić dodatkowych potencjometrów, w tym momencie nie są one zaangażowane. Lub możesz umieścić i monitorować stronę źródłową, być może autor ostatecznie opublikuje zaktualizowane oprogramowanie.
W rzeczywistości joystick działa jak dzielnik, odchylając uchwyt, zmieniamy napięcie na środkowej mocy potencjometru, aw zależności od tego napięcia arduino określa odchylenie.
[centrum] [/ centrum]
Tumblery są również podłączone. Przełączniki są potrzebne do włączania i wyłączania, ponieważ kanał jest dyskretny i ma tylko dwie wartości - 0 lub 1, w zależności od tego, czy wyjście arduino jest przyciągane do ziemi, czy do źródła zasilania 5 V. Ponadto przełącznik włączania jest konieczny, jeśli zostawisz wyjście „wiszące w powietrzu”, co by się stało przy użyciu trzech pozycji, kontroler nie rozumie, co się dzieje, a wartość losowo przeskakuje 0 lub 1 (z mojego doświadczenia). Nie można ustawić dodatkowych potencjometrów, w tym momencie nie są one zaangażowane. Lub możesz umieścić i monitorować stronę źródłową, być może autor ostatecznie opublikuje zaktualizowane oprogramowanie.
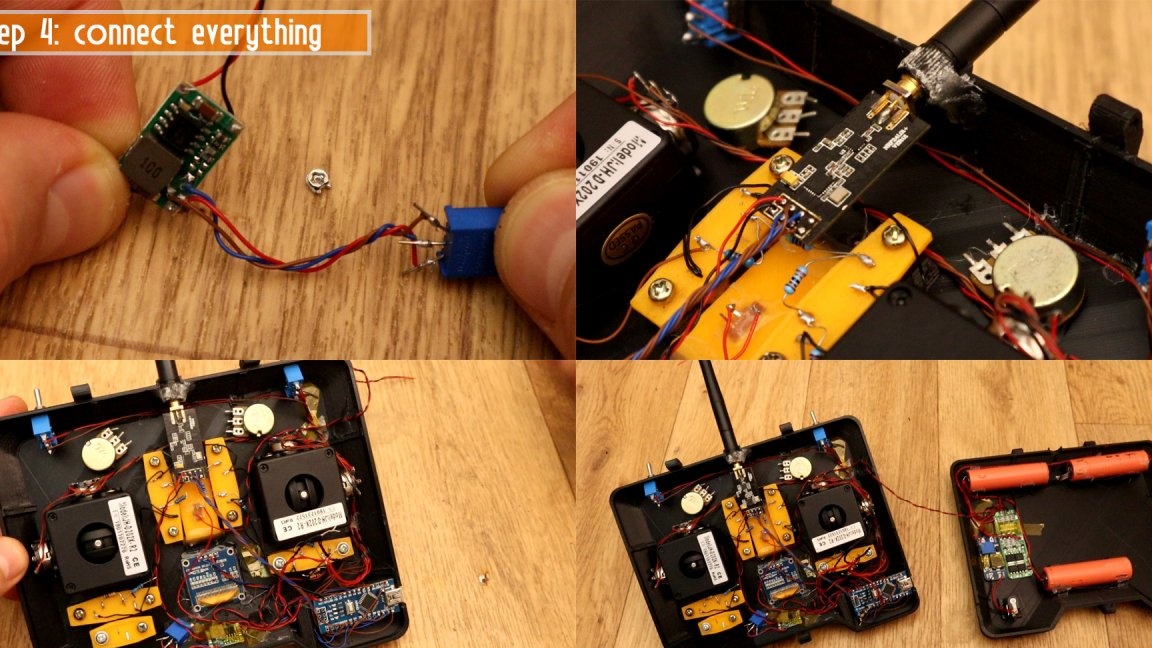
Następnie instaluje się arduino, moduł radiowy i płytę zasilania modułu radiowego. Jak opisano powyżej, konieczne jest ustawienie na nim napięcia 3,3 wolta. Jest to prawie niemożliwe, aby to zrobić za pomocą standardowego rezystora zmiennego, więc autor rozlutował go i wlutował wieloobrotowy trymer. Następnie montuje się wyświetlacz, a wszystkie elementy podłącza się do zacisków arduino zgodnie ze schematem.
Oprogramowanie układowe
O oprogramowaniu Arduino mówiono już około 1000 razy. W tym momencie możliwość zrobienia tego przy jednoczesnym trzymaniu się projektu arduino jest tak samo ważna domyślnie, jak umiejętność trzymania lutownicy w dłoniach podczas trzymania czegoś do lutowania.Kod nadajnika, odbiornika, niezbędnych bibliotek i plik do drukowania 3D obudowy można pobrać w jednym archiwum na końcu artykułu.
Odbiornik
Do odbiornika potrzebna będzie kolejna płytka Arduino, moduł radiowy (bez anteny, telemetria nadal nie jest tu zaimplementowana) i stabilizator 3,3 V. Odbiornik jest przylutowany do płyty chlebowej. Moc odbiornika odbywa się w taki sam sposób, jak moc każdego innego odbiornika fabrycznego, ze specjalnego wyjścia regulatora prędkości.

Sam chcę dodać, że zamiast standardowej anteny tego modułu pożądane jest lutowanie tej samej anteny, która jest zainstalowana w module ze wzmacniaczem (tylko bez obudowy). Nie wpłynie to szczególnie na zasięg odbioru, ale znacząco wpłynie na jakość odbioru w zależności od pozycji kontrolowanego modelu w różnych płaszczyznach. W przypadku nowoczesnych odbiorników i nadajników w tym celu instalowane są nawet dwie anteny, które są umieszczone prostopadle do siebie.
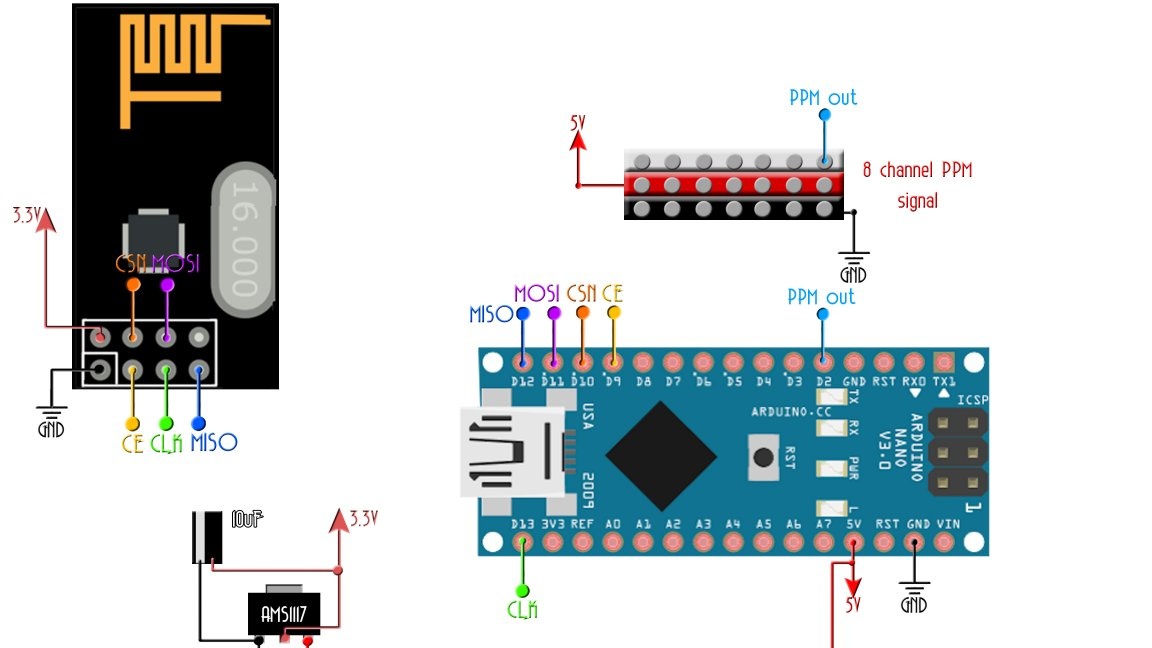
Ponadto autor zaimplementował bardzo ważną funkcję - wyjście z sygnału odbiornika PPM. Schematycznie nic się nie zmienia w tym przypadku, wystarczy wypełnić inne oprogramowanie, sygnał PPM jest wyprowadzany w taki sam sposób, jak w większości fabrycznych odbiorników - z pierwszego kanału (gazu).
To wszystko. Osobiście bardzo podobał mi się projekt i, jak już powiedziałem, planuje powtórzyć go w przypadku ze zdalnego sterowania zabawką dla dzieci. W menu możesz wybrać tryb od liniowego do wykładniczego i precyzyjnie dostroić wartość każdego drążka. Pamiętaj, że średnia wartość każdego kanału powinna wynosić 127.
Możesz pobrać wszystko, czego potrzebujesz tutaj.
Wszystkie sukcesy w pracy!