


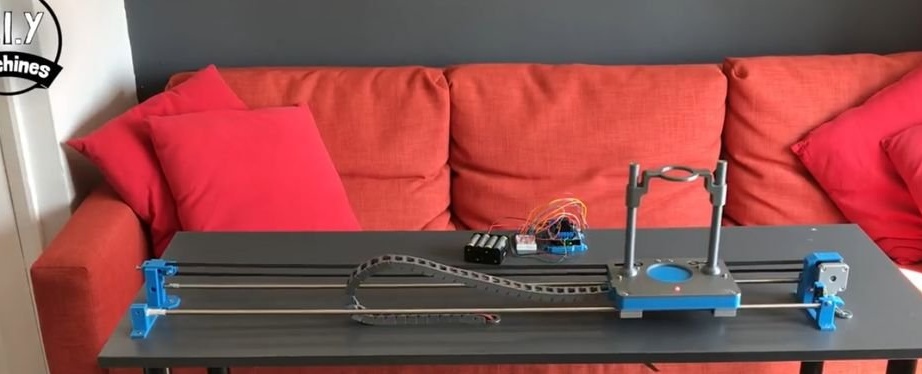
W tym artykule Kreator opowie nam, w jaki sposób stworzył robota-barmana kontrolowanego przez smartfona.
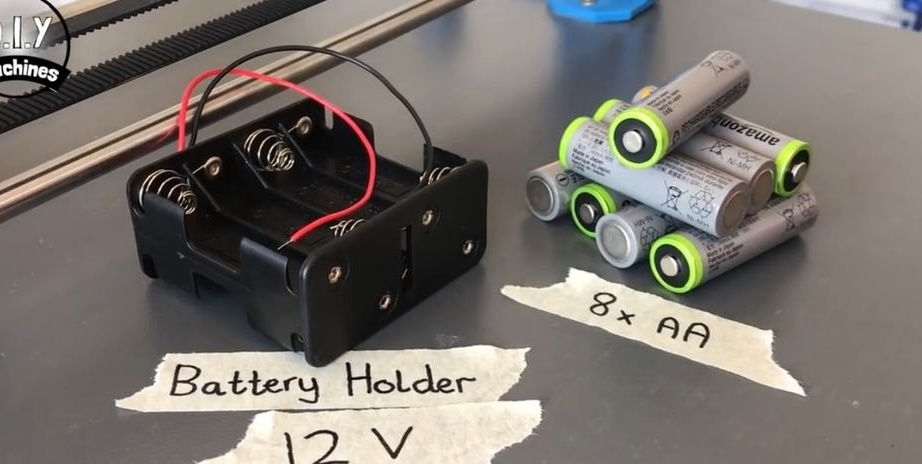
Cechy urządzenia: praca na Arduino, przystępna cena, sterowanie Bluetooth z dowolnego gadżetu, autonomia (praca z 8 baterii AA).
Aby zbudować takie urządzenie, master wykorzystał następujące
Materiały i narzędzia:
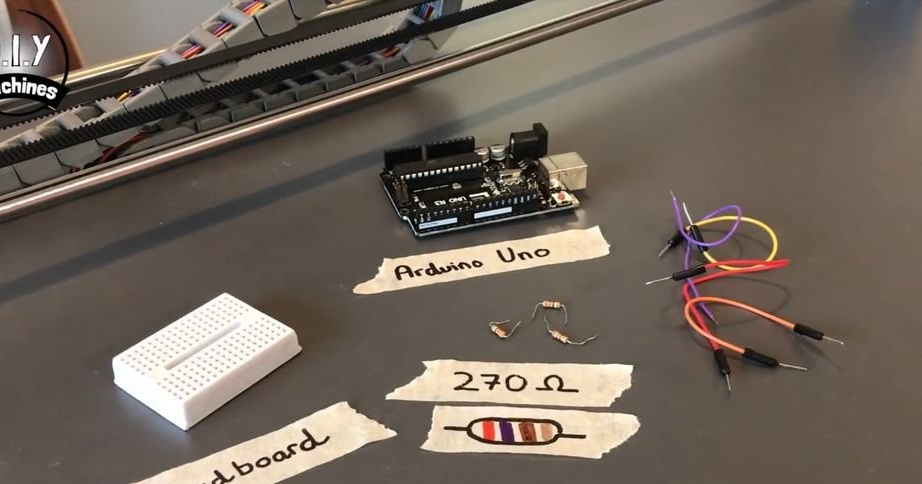
-Arduino Nie;
-Silnik kierowcy L293D;
- przełącznik styków;
-Liniowe łożyska;
-Step silnika;
-Belt i koło pasowe (wersja 2m);
-Belt i koło pasowe (wersja 5m);
-HM10 moduł Bluetooth;
-Śrubokręt;
- łączniki;
-Nogi;
- blat stołu;
Drukarka 3D;
-Metalowe pręty;
- śrubokręt;
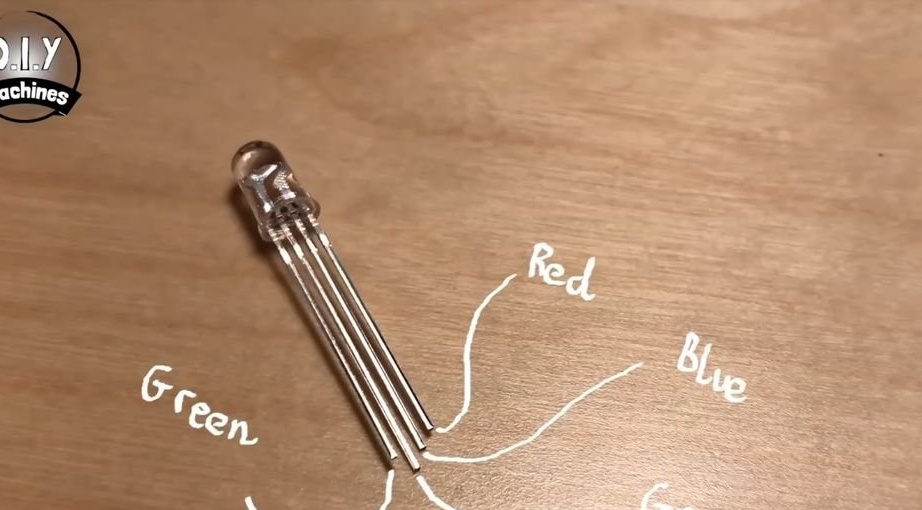
- LED RGB;
-Wire;
- Akcesoria do lutowania;
-Zolenta;
-Klej pistoletu;
-Przedział baterii;
-Złącza;
-Baterie;
-Komputer z oprogramowaniem;
- Uchwyty na butelki;
Zawór
-Butelki;
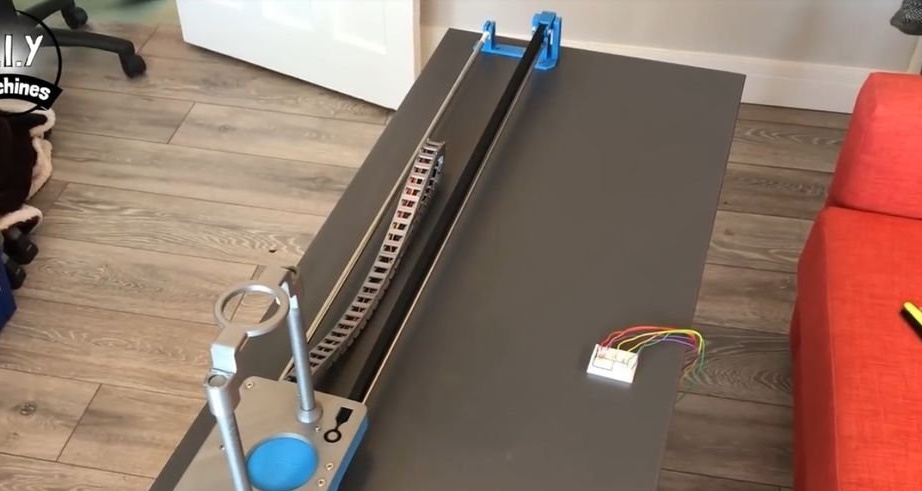
Krok pierwszy: stół
Najpierw mistrz zbiera stół. Rozmiar stołu 120 * 45 cm Grubość blatu 18 mm.


Krok drugi: Napinacz
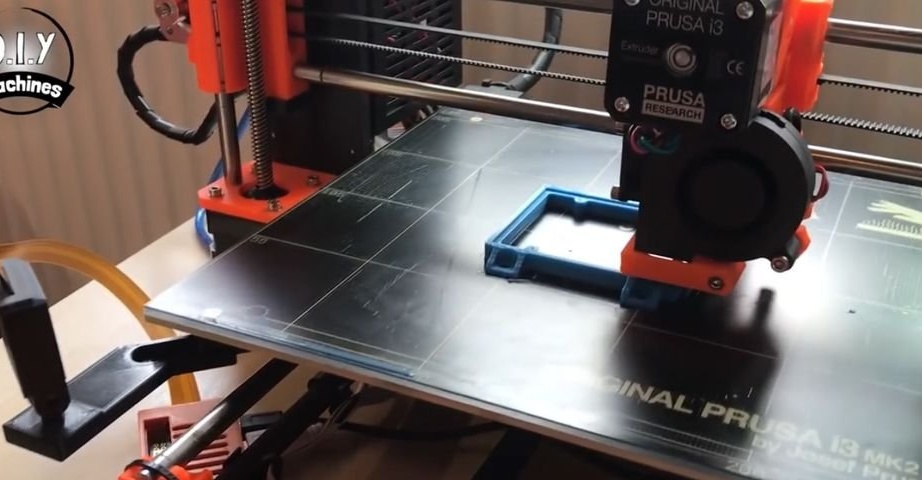
Pliki do drukowania części można pobrać poniżej.
Pliki do drukowania 3D.
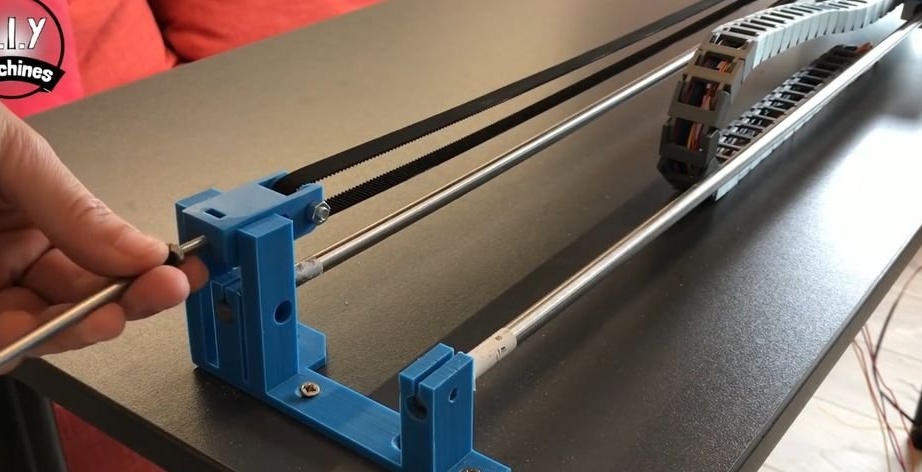
Teraz konieczne będzie wydrukowanie dwóch pierwszych szczegółów „idler.stl” i „Rod_Clamp_V5.stl”.
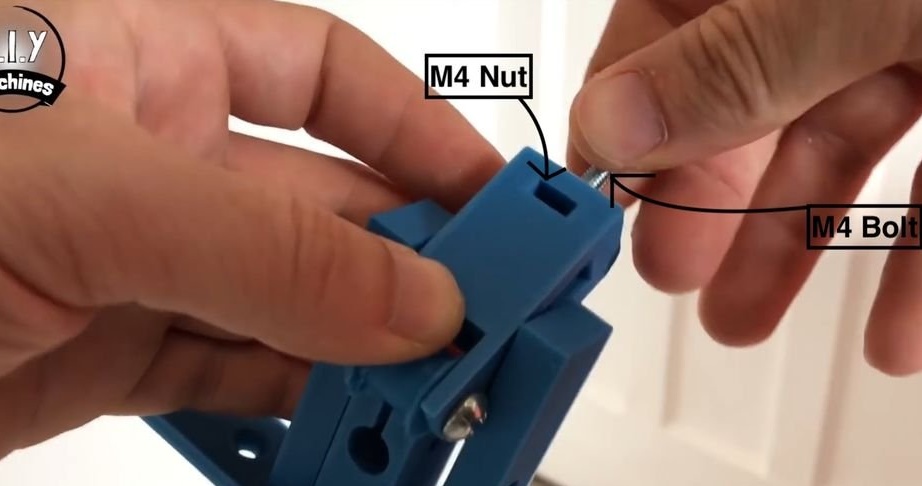
Po wydrukowaniu konieczne jest przymocowanie rolki napinającej do zacisku trzpienia za pomocą długiej śruby M4 i nakrętki. Mocne mocowanie nie jest konieczne, ponieważ wałek musi się swobodnie obracać.
Następnie dwie części są łączone ze sobą.
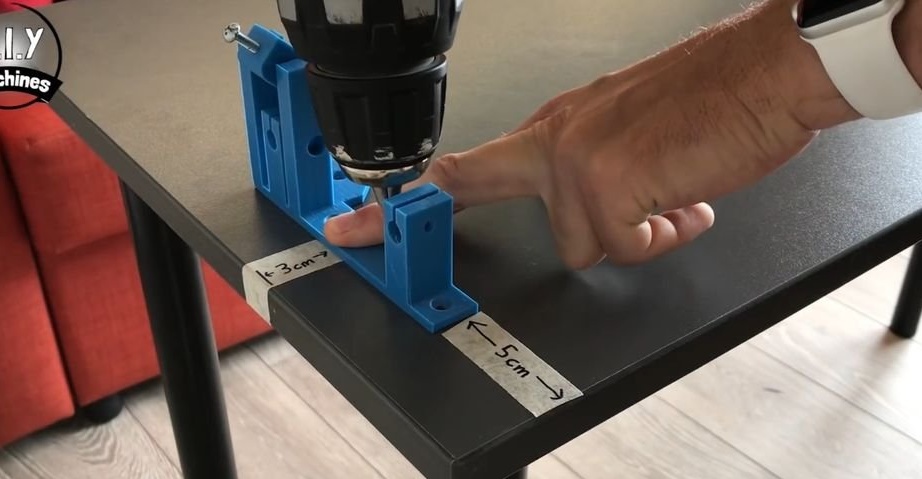
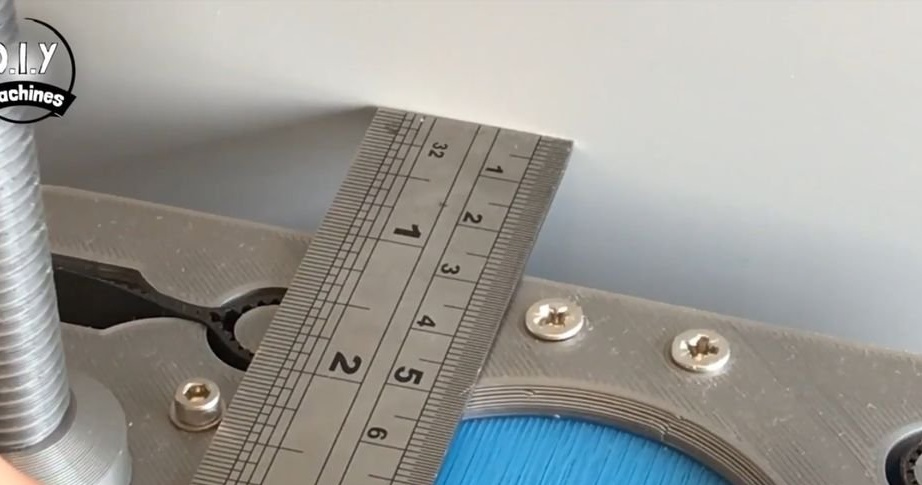
Znaki na stole 3 cm od lewego krótkiego końca i 5 cm od przedniej krawędzi i dokręca napinacz.

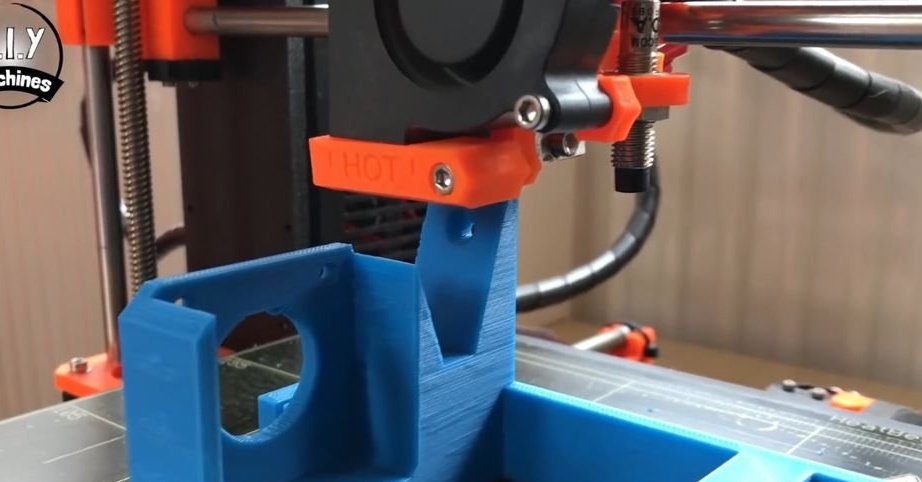
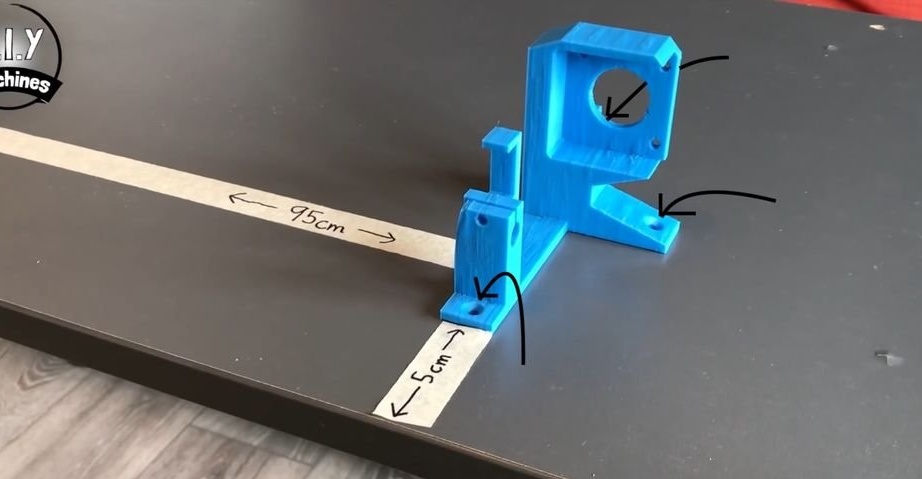
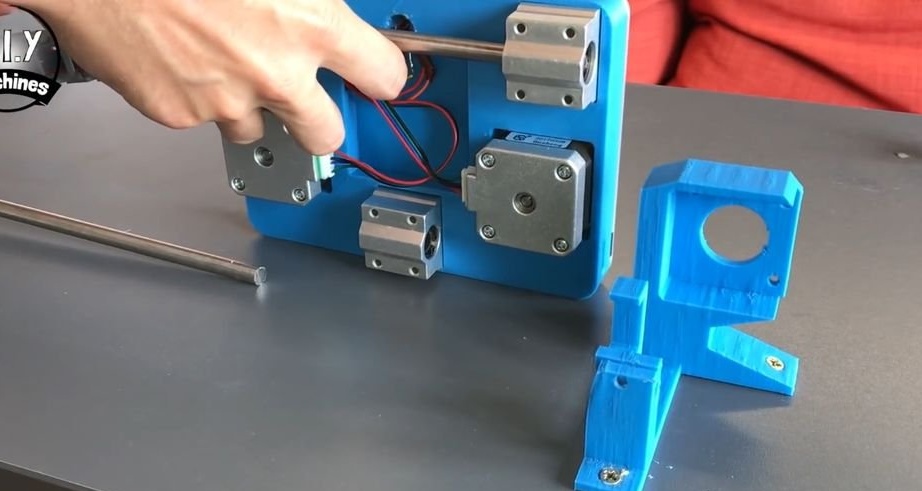
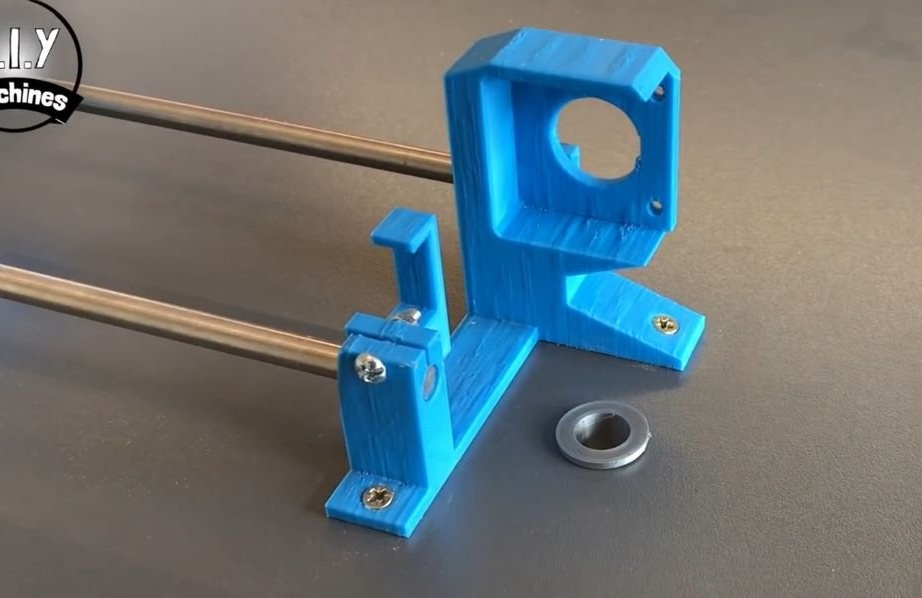
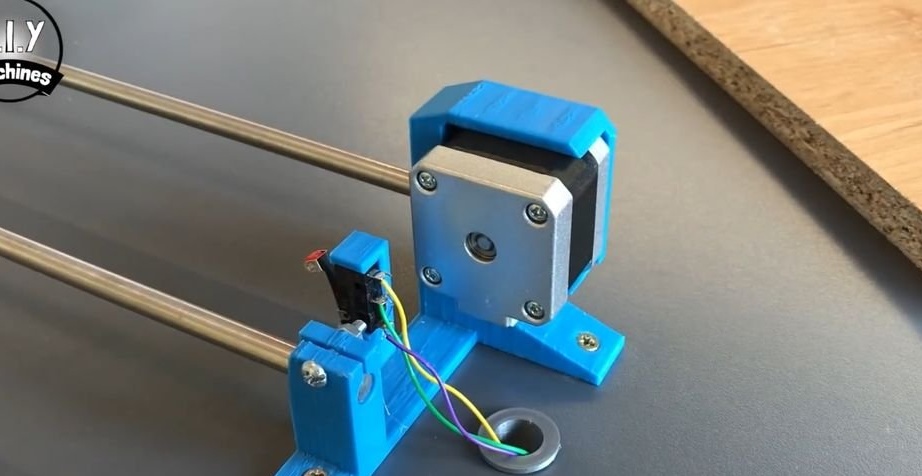
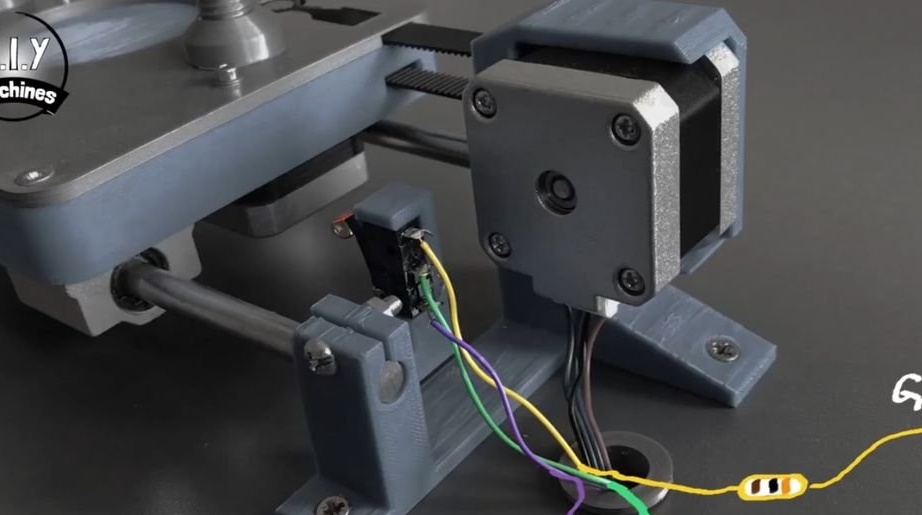
Krok drugi: mocowanie silnika
Drukuje mocowanie silnika, plik „X_Axis_Motor_Mount.stl”. Mocuje na blacie w odległości 95 cm od napinacza i 5 cm od krawędzi stołu.
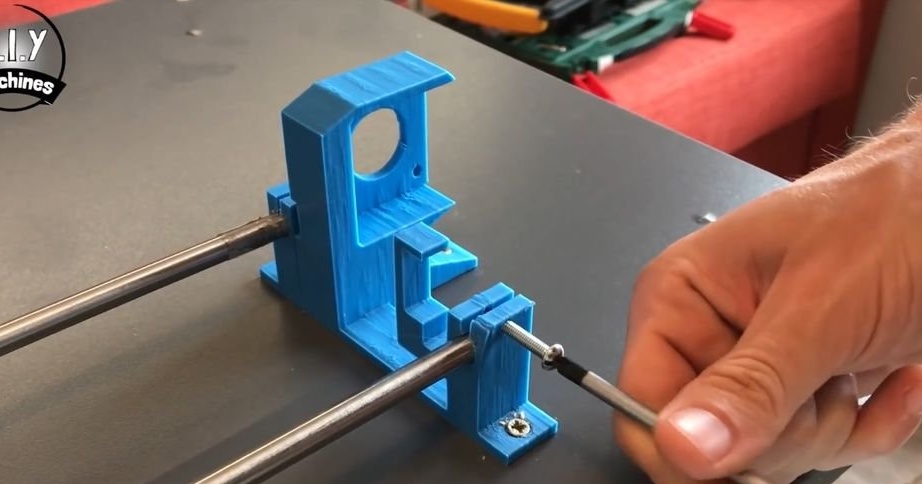
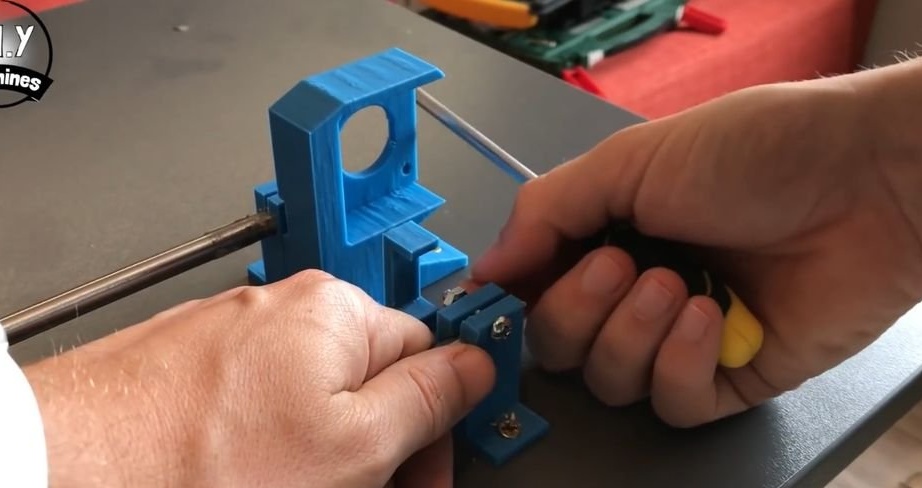
Krok trzeci: przewodniki
Ustawia prowadnice. Długość prętów wynosi 1 metr.
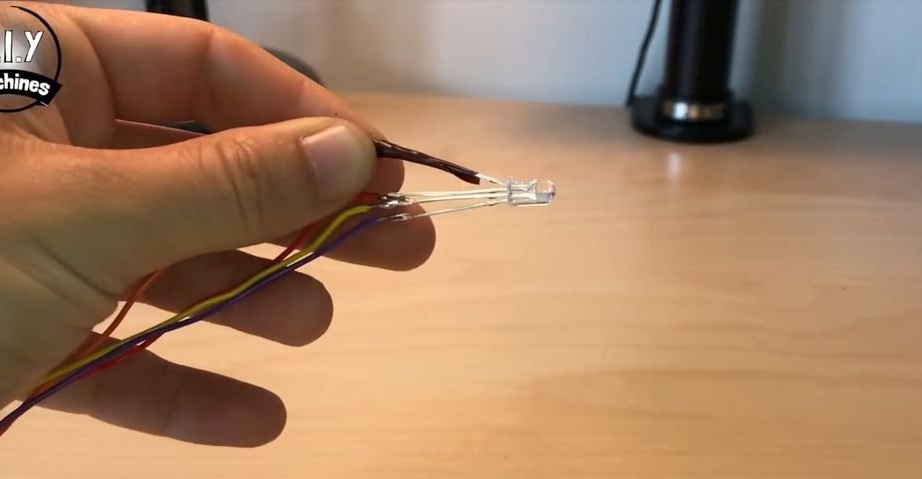
Krok czwarty: LED
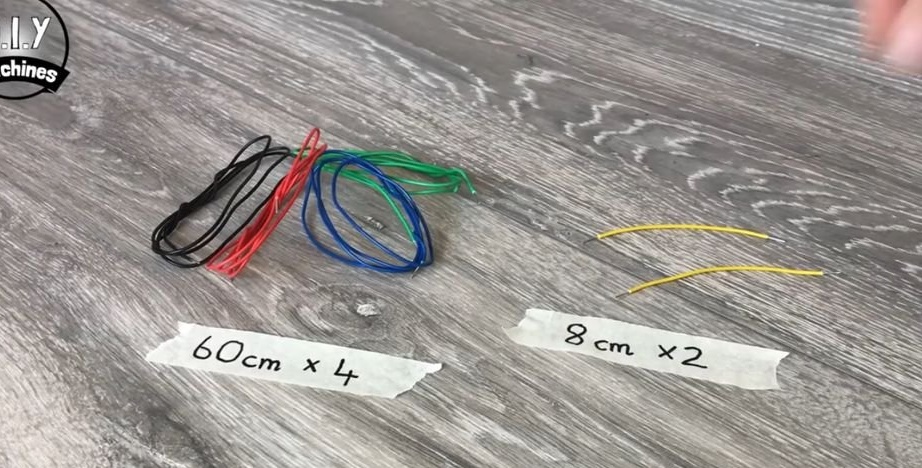
Mistrz użyje diody RGB do wskazania. Przylutuj 180 cm druty w różnych kolorach do każdej nogi. Węzeł izoluje się.




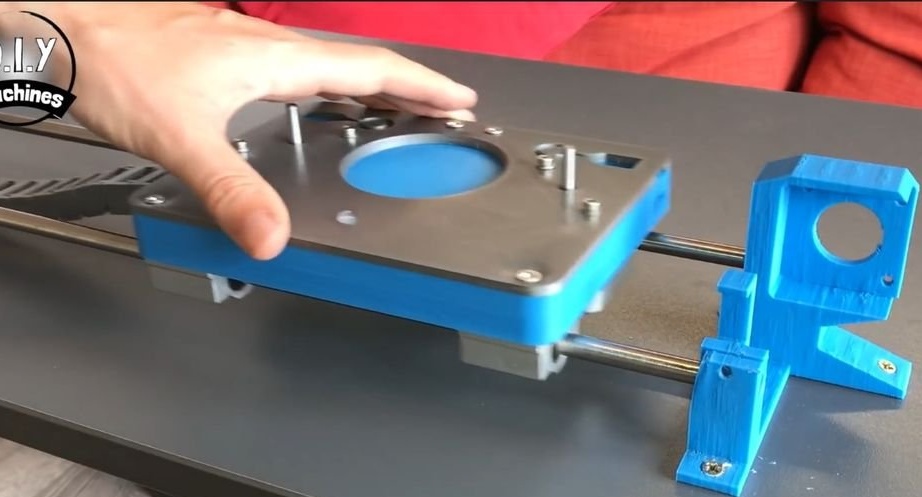
Krok piąty: platforma
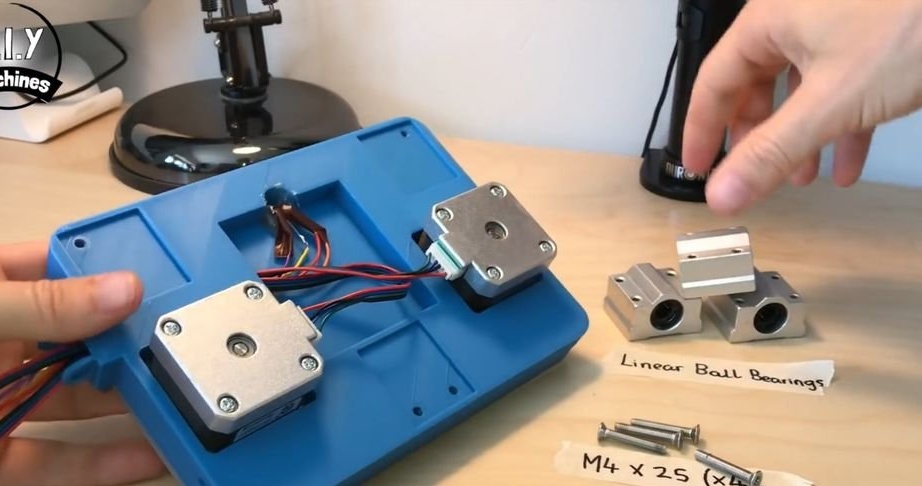
Drukuje część „slider_base_v3.stl”. Naprawia diodę LED. Instaluje silniki krokowe.
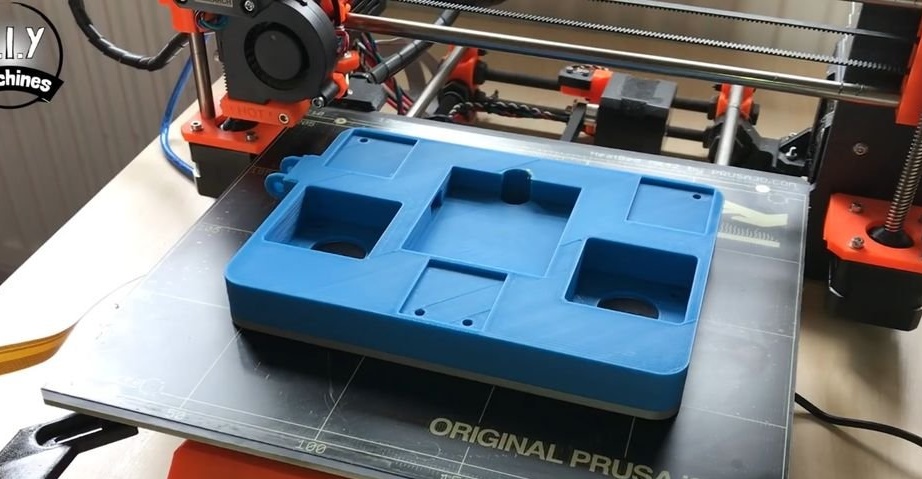

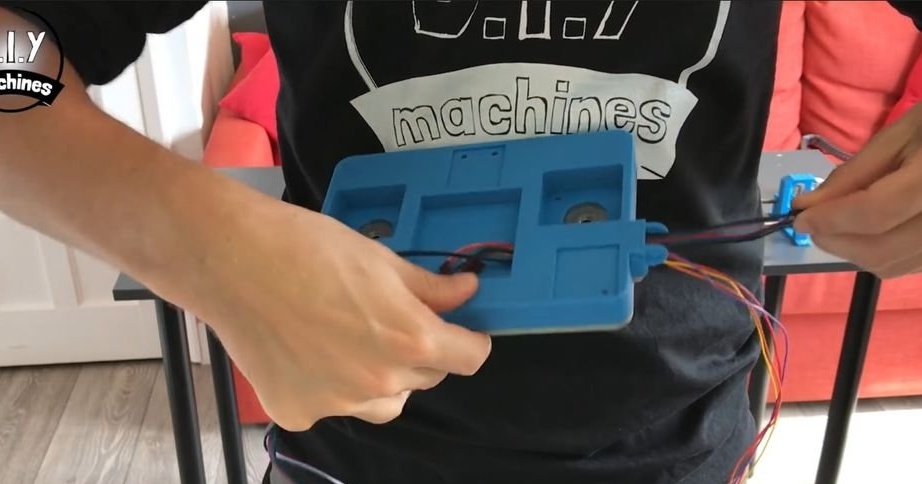
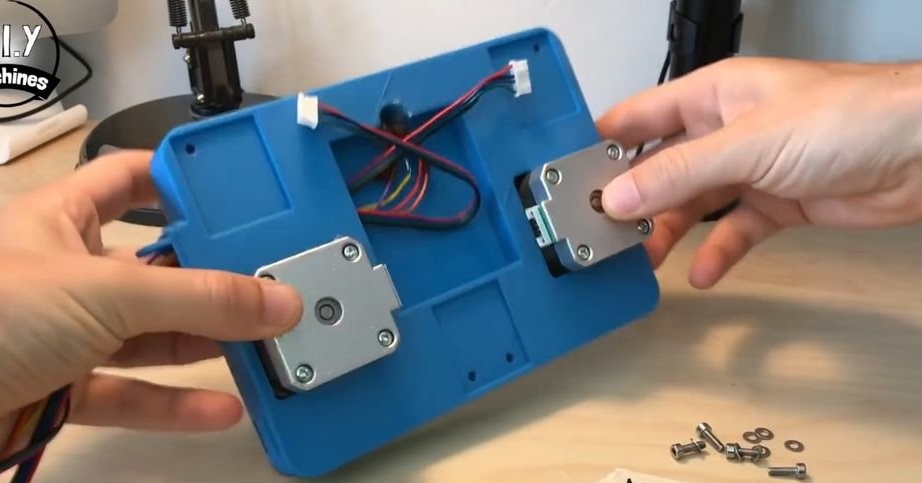
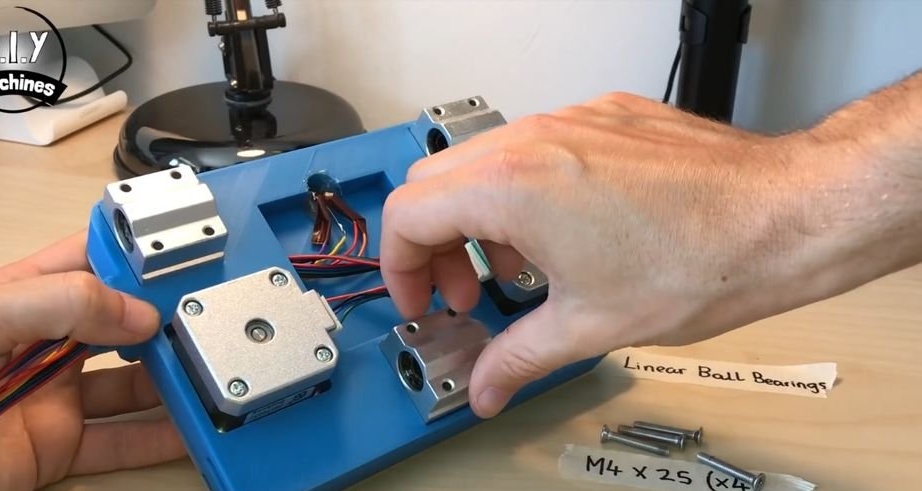
Instaluje łożyska liniowe.
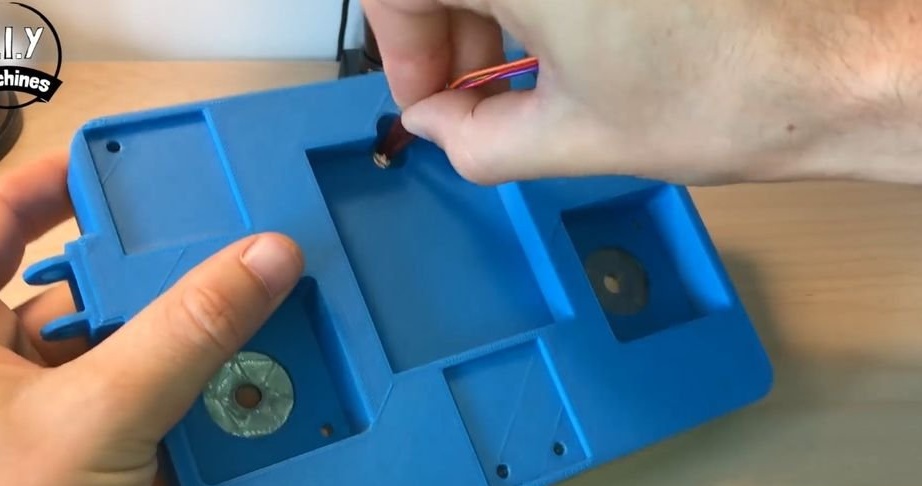
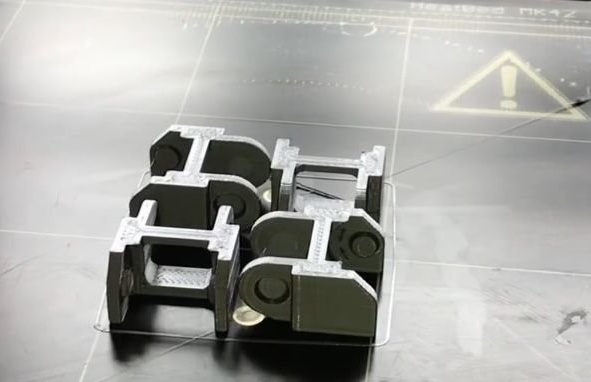
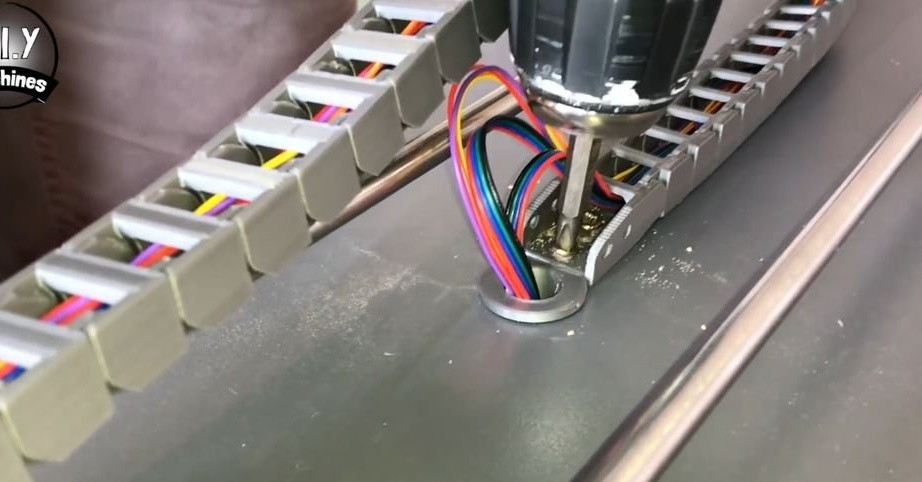
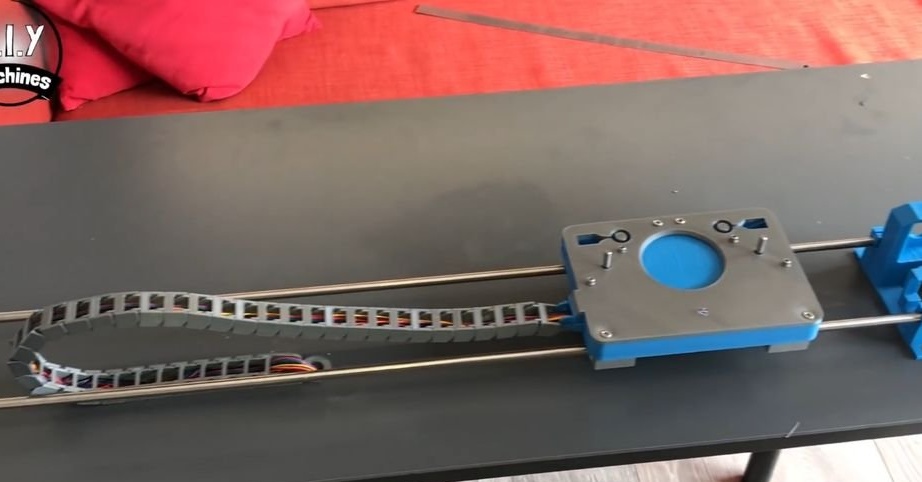
Krok szósty: kanał kablowy
Kanał kablowy dla urządzenia składa się z oddzielnych segmentów połączonych w jednym obwodzie.Wewnątrz obwodu układane są przewody. Łańcuch jest ruchomy i wygina się w razie potrzeby. Segmenty łańcucha są również drukowane na drukarce.


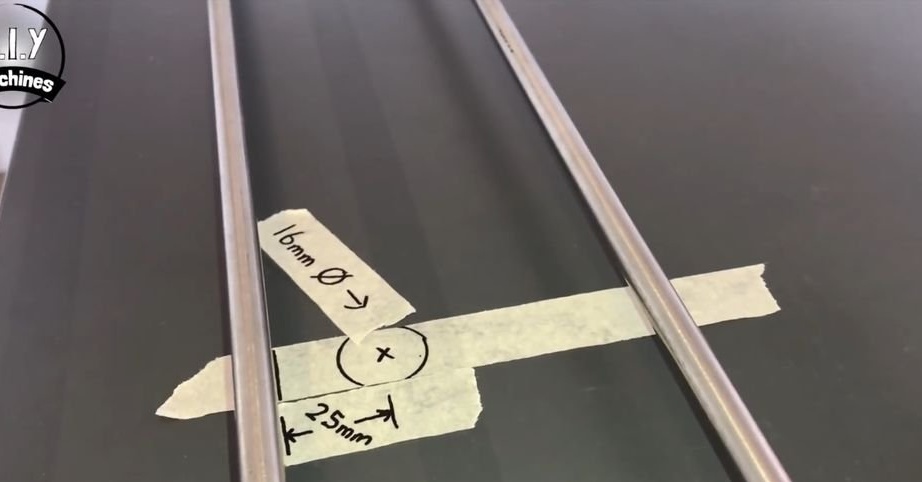
W odległości 25 mm od skrajnej prowadnicy i 47 cm od napinacza wierci otwór 16 mm. Wstawia tuleję „Table_Tidy.STL” w otwór. Mocuje kanał kablowy jeden koniec na platformie, drugi na blacie obok rękawa. Rozciąga przewody.



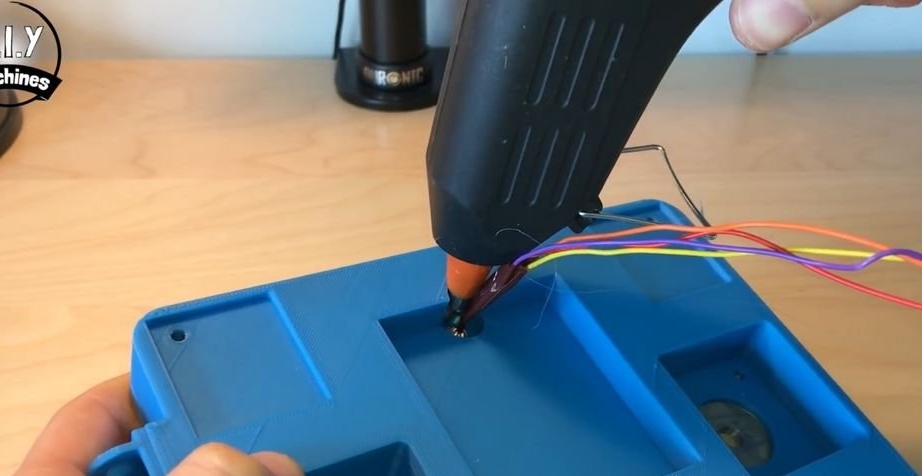
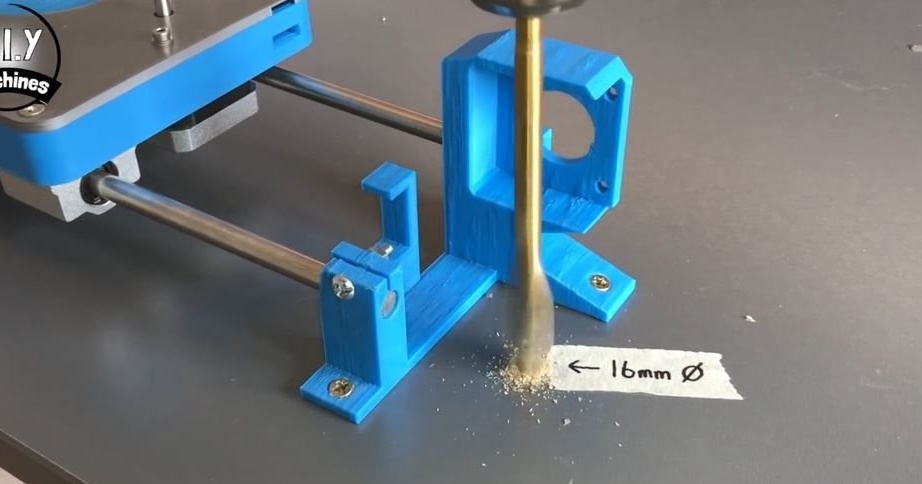
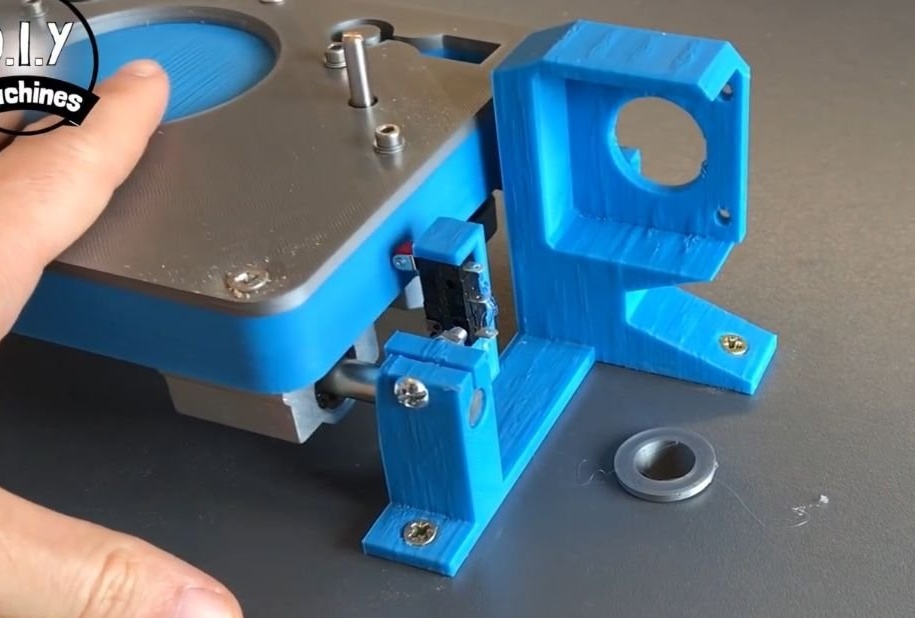
Siódmy krok: zmiana
Obok mocowania silnika wierci się kolejny otwór 16 mm. Wstawia w nią rękaw. Mocuje przyczepę do uchwytu. Przylutuj do styków za 1 metr drutu.

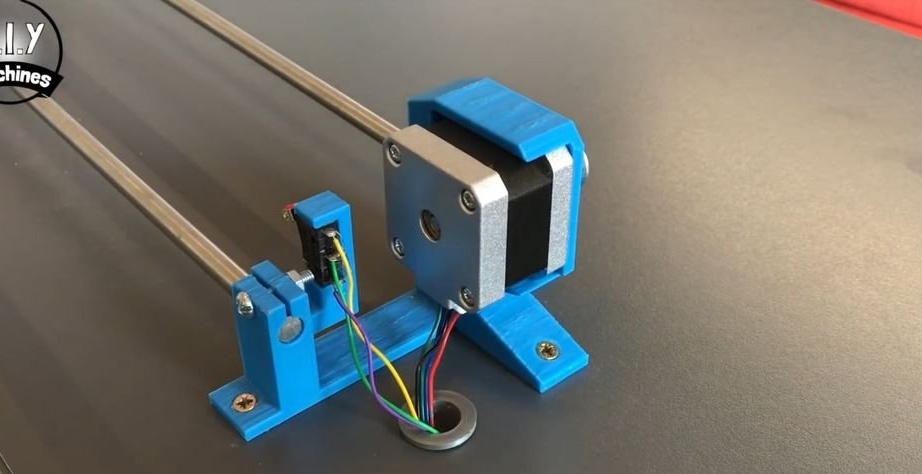
Krok ósmy: silnik osi X
Zabezpiecza silnik do montażu.

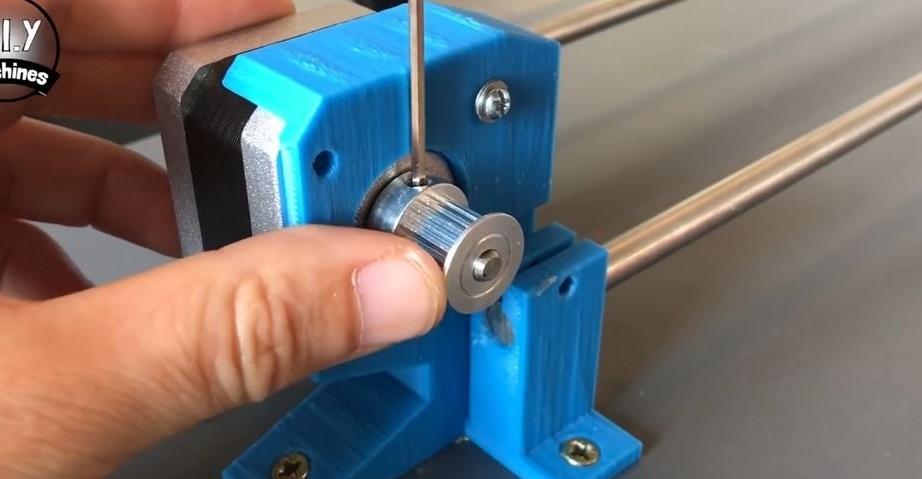
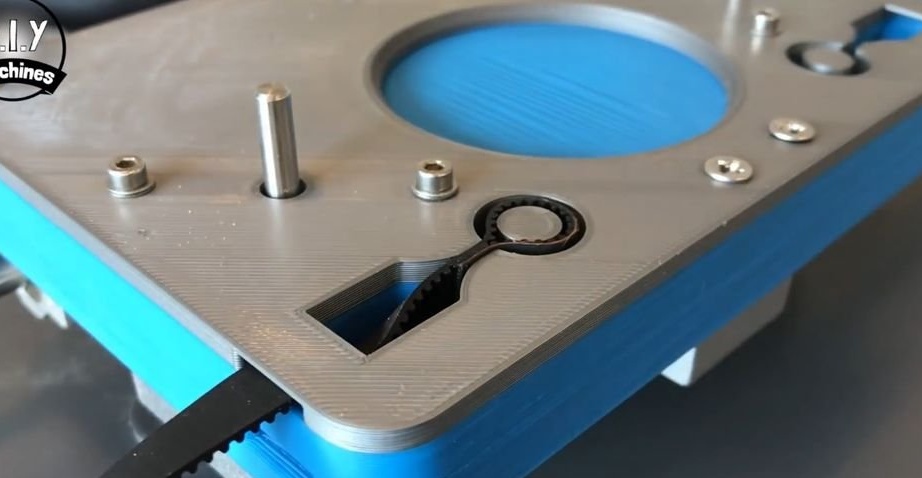
Krok dziewiąty: Pas
Zabezpiecza koło pasowe na wale silnika. Mocuje koniec paska do uchwytów platformy. Przeciąga pasek przez koło pasowe i przez koło pasowe napinacza. Mocuje drugi koniec do uchwytów. W razie potrzeby napięcie paska można regulować poprzez dokręcenie lub odkręcenie śruby.







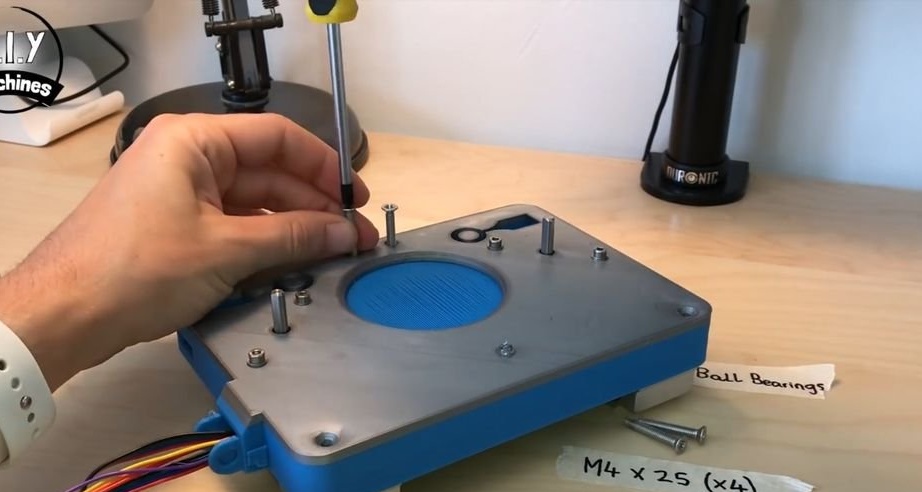
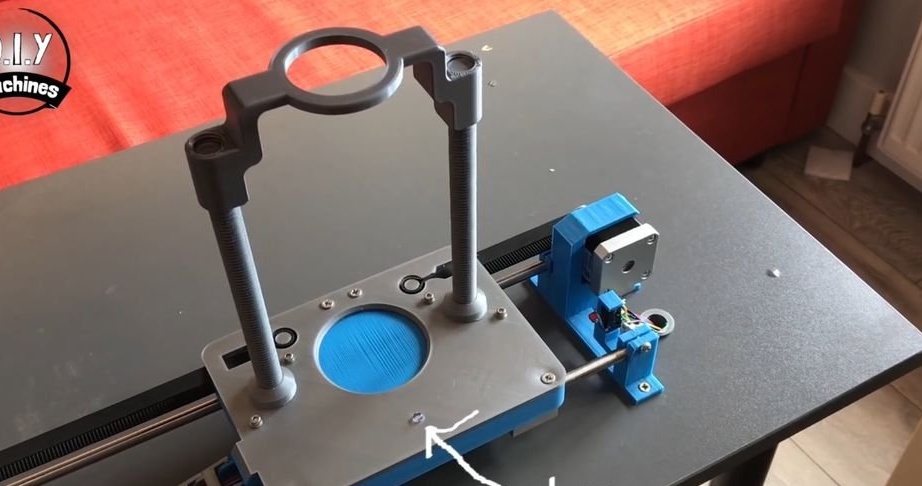
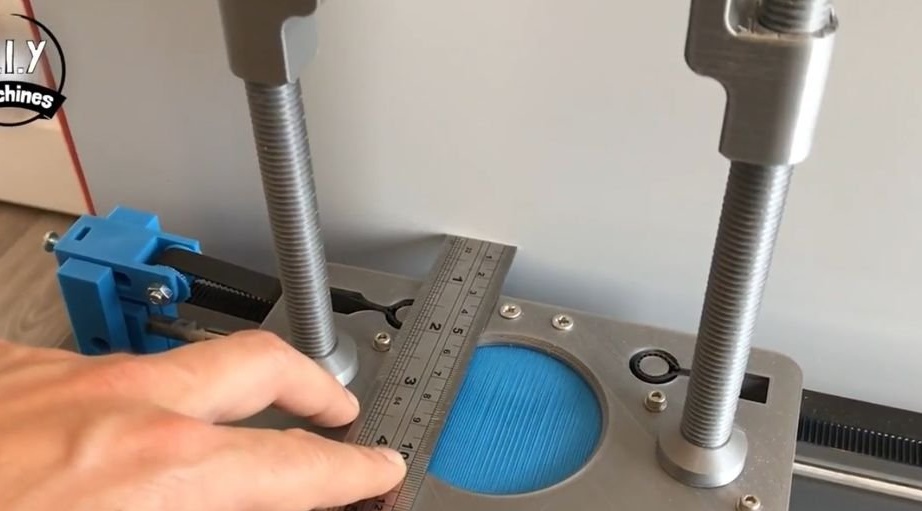
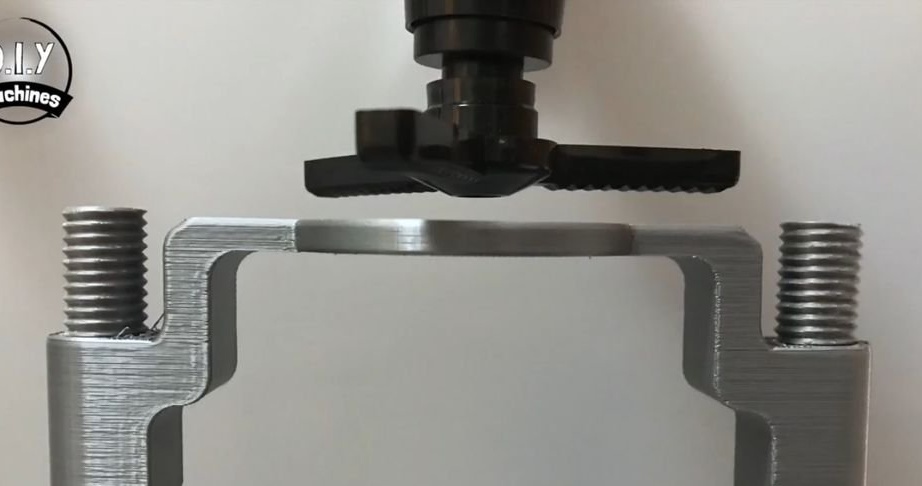
Krok dziesiąty: Uchwyt na kubek
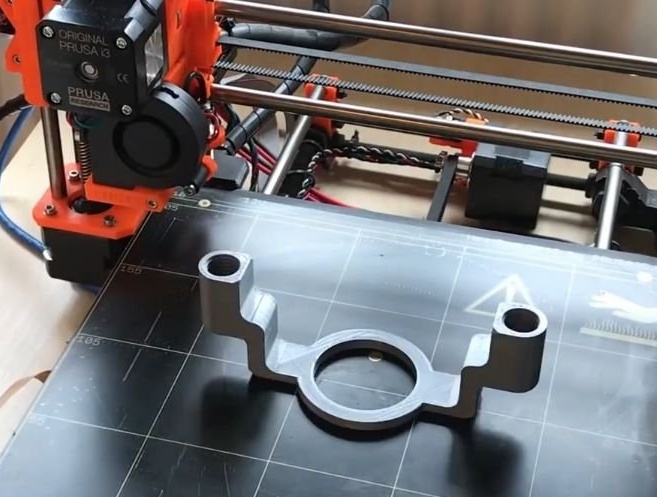
Drukuje dwa pręty gwintowane main_rod2.3.STL i uchwyt Dispenser_Paddle_V2.STL. Zapinany na platformie.



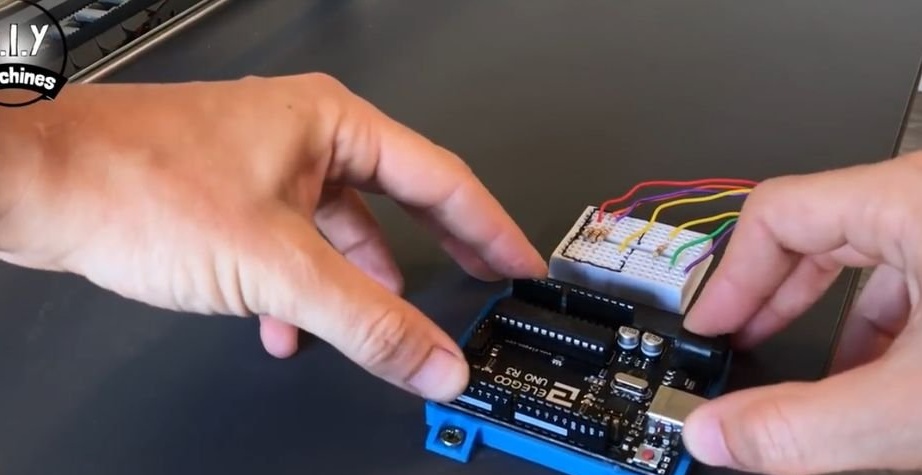
Krok jedenasty: wskaźnik, przyczepa, deska do krojenia
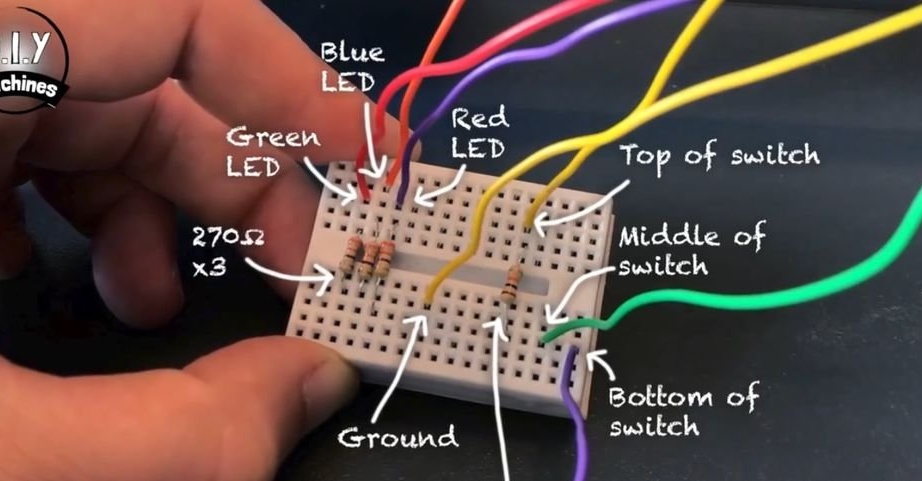
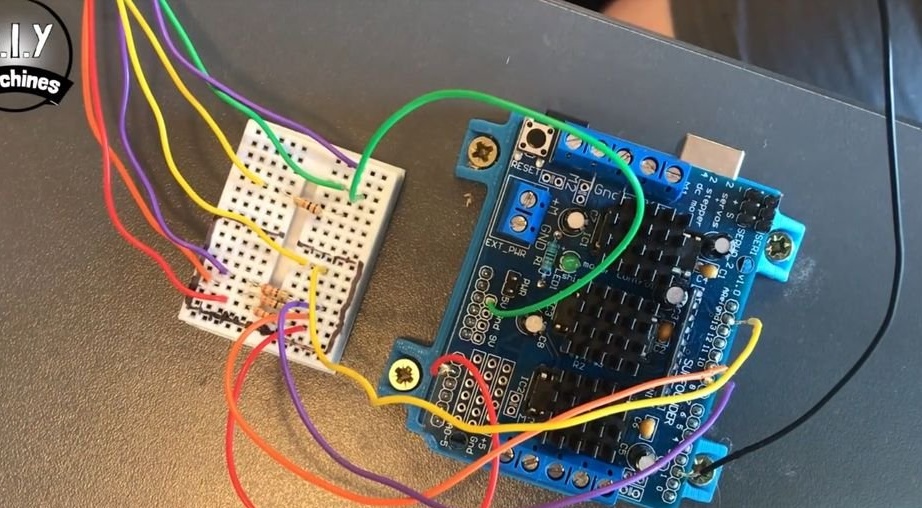
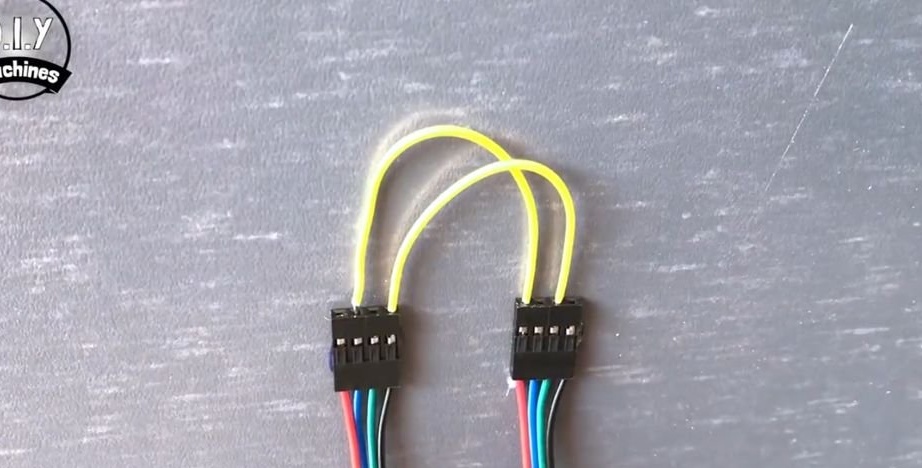
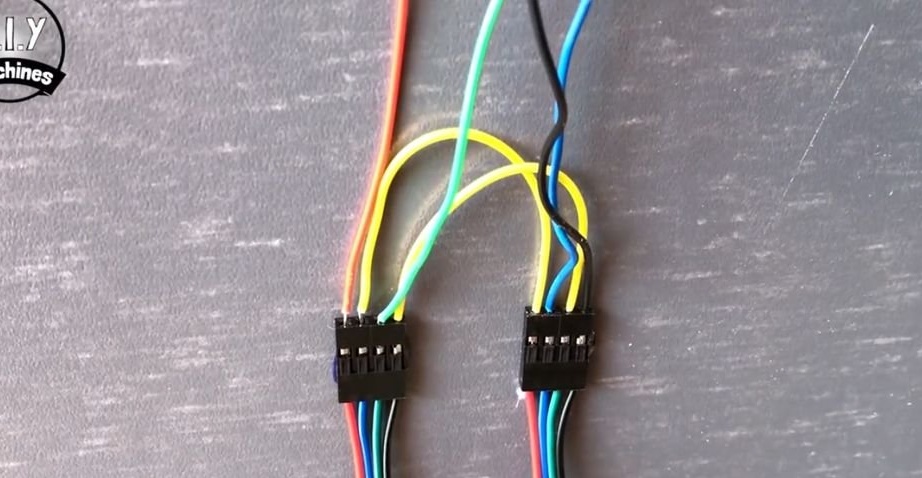
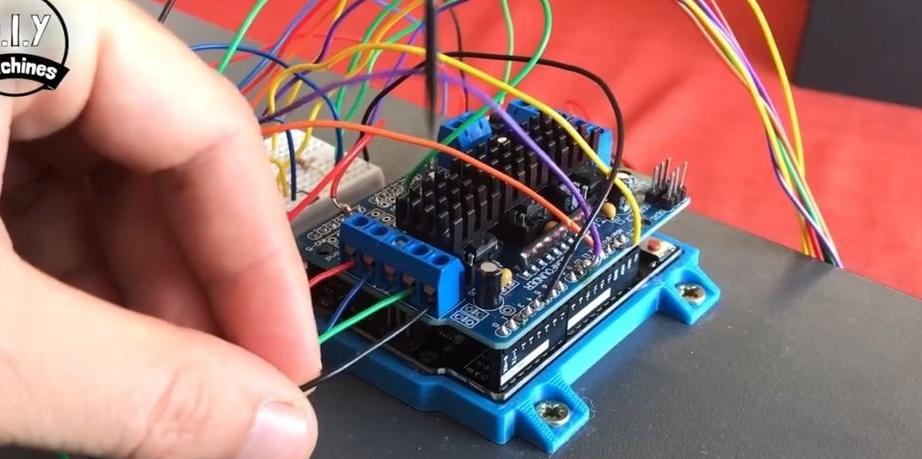
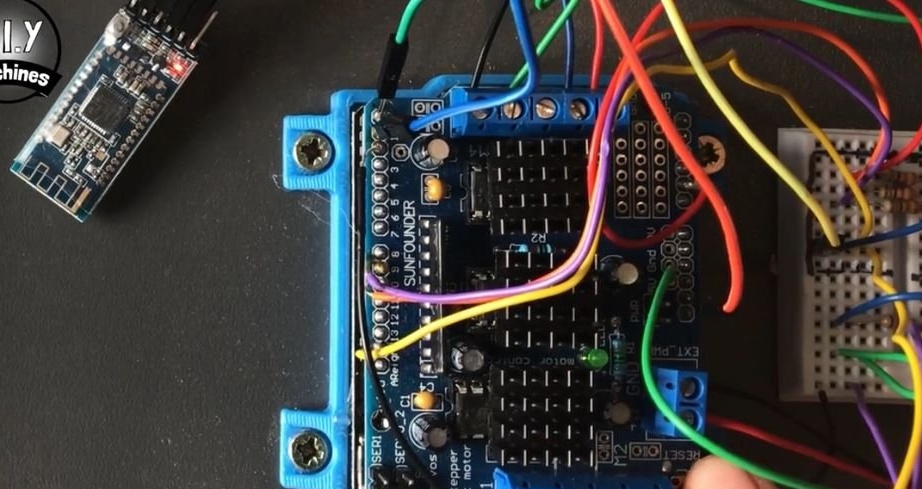
RGB LED, ma cztery nogi. Jedna noga jest wspólna, a trzy w kolorze. Mistrz bierze cztery kolejne przewody o długości około 15 cm i lutuje je w następujący sposób (według kolorów świecenia diody LED) do modułu sterownika silnika:
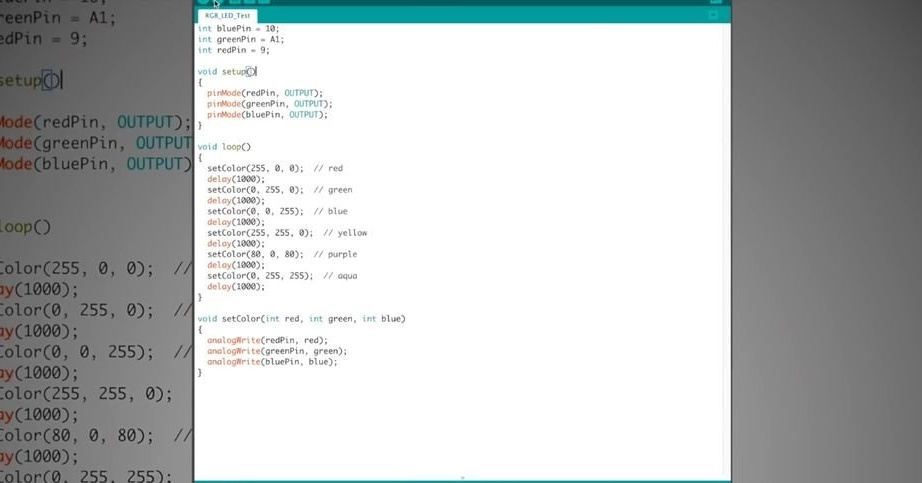
Czerwony do pinu D9
Niebieski do pinu D10
Zielony do pinu A1
Katoda do styku GND.
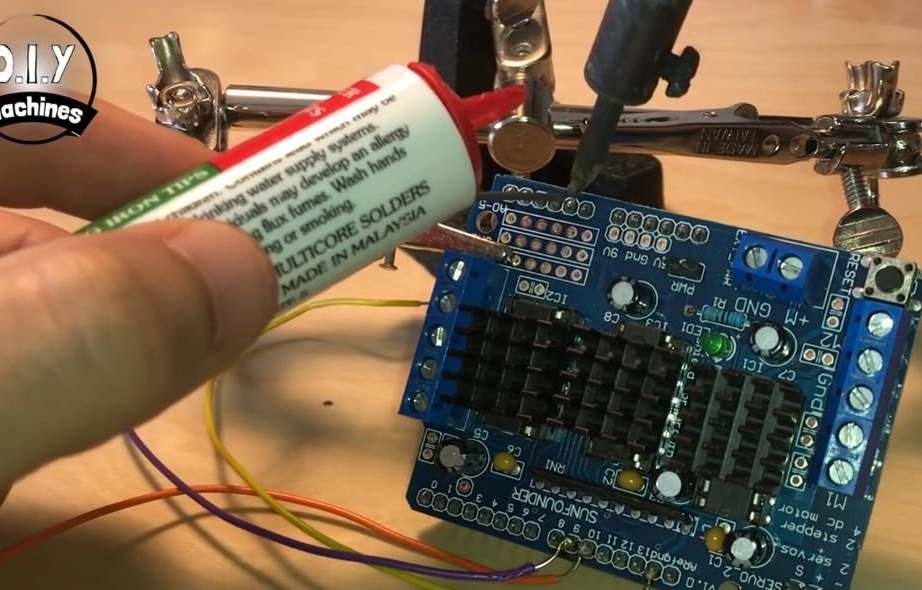
Łączy przyczepę: górny styk to GND, środkowy styk to 5 V, dolny styk to wyjście nr 2.
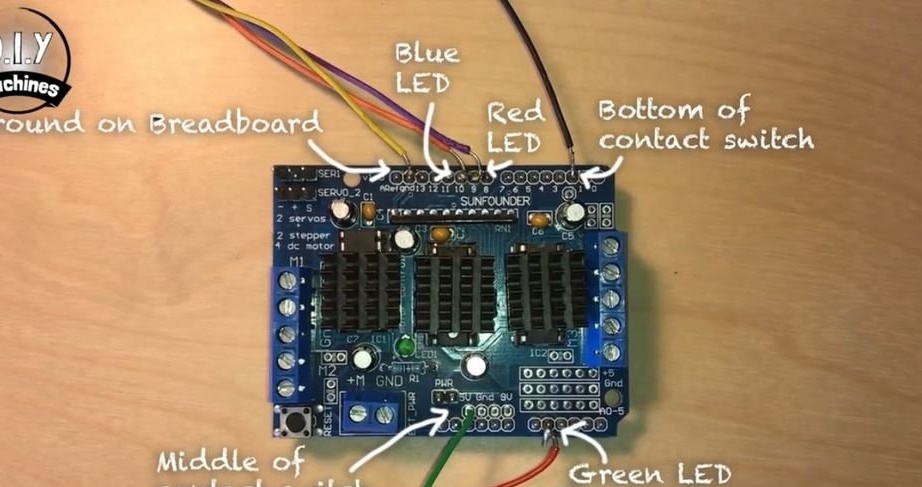
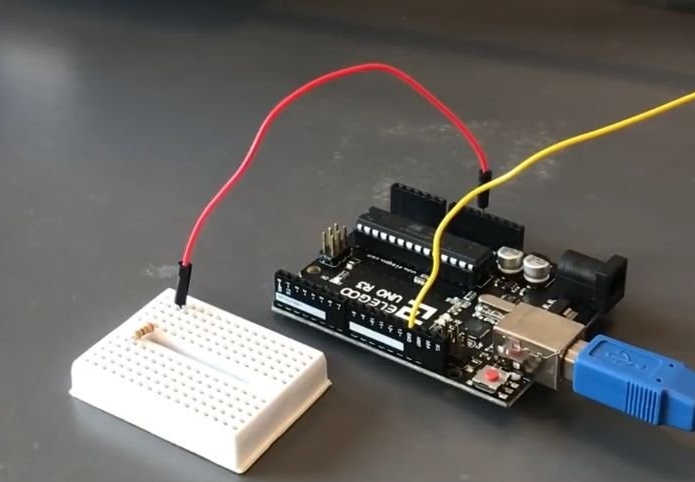
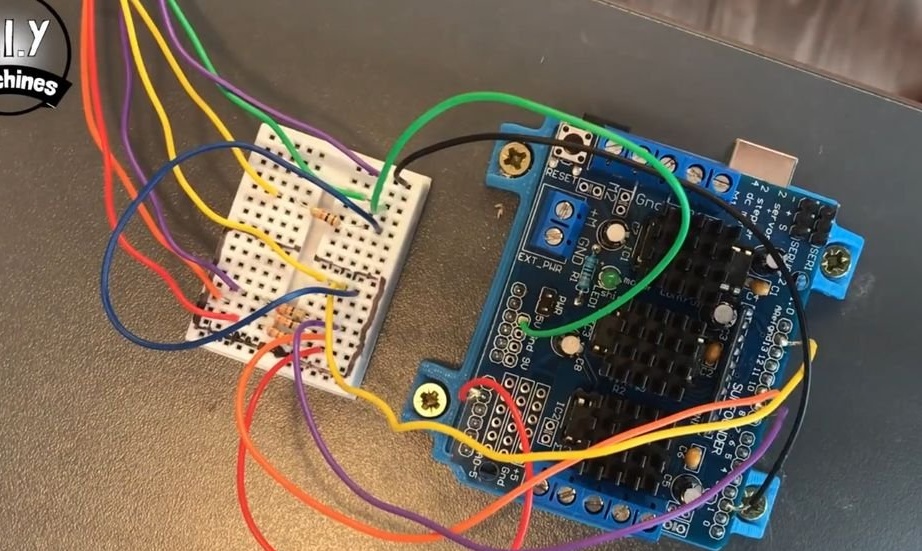
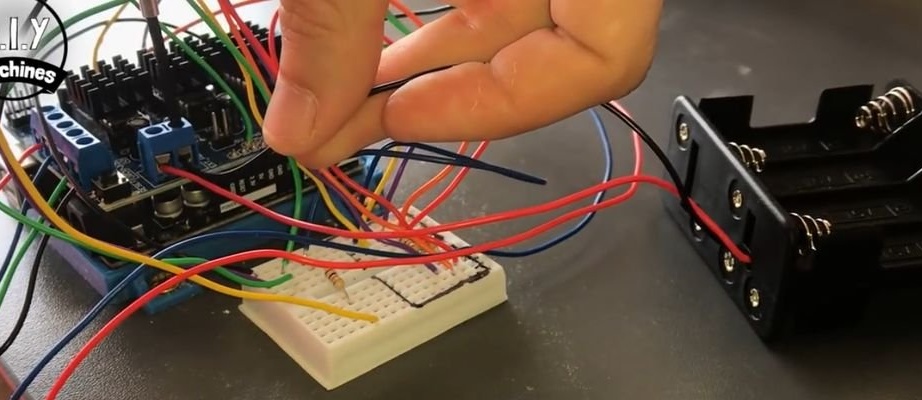
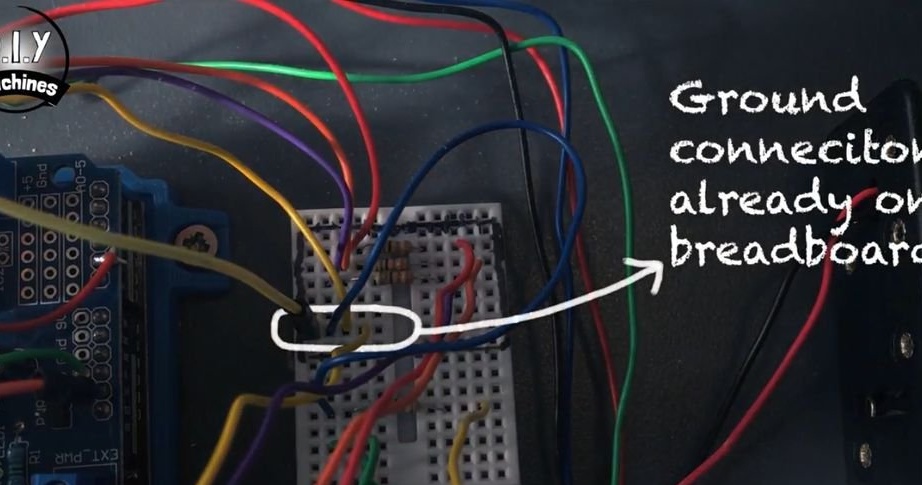
Następnie montuje wszystko na płycie chleba (patrz zdjęcie). Zabezpiecza tablicę na stole.
Krok dwunasty: Arduino
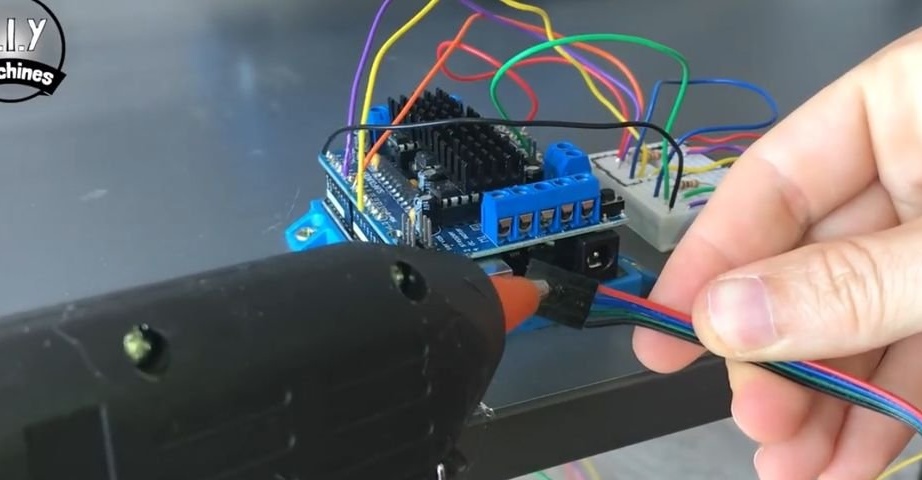
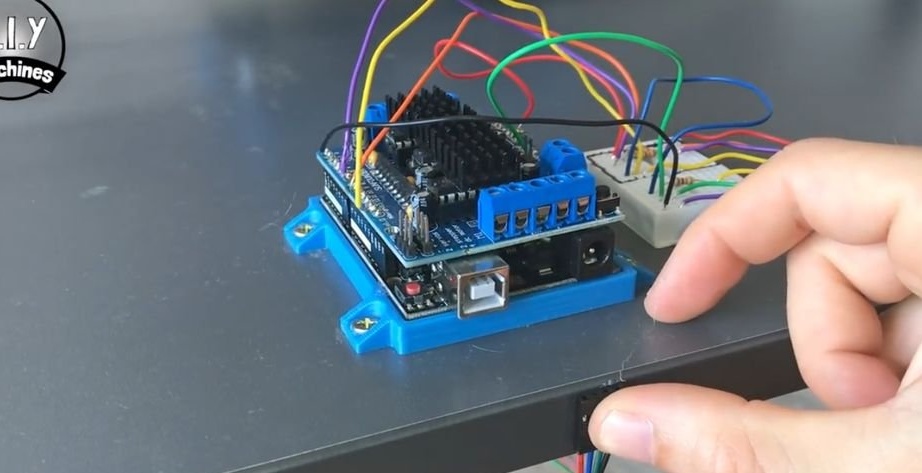
Drukuje płytę montażową do Arduino. Mocuje talerz do stołu. Mocuje się na talerzu Arduino. Instaluje moduł sterownika silnika w Arduino.
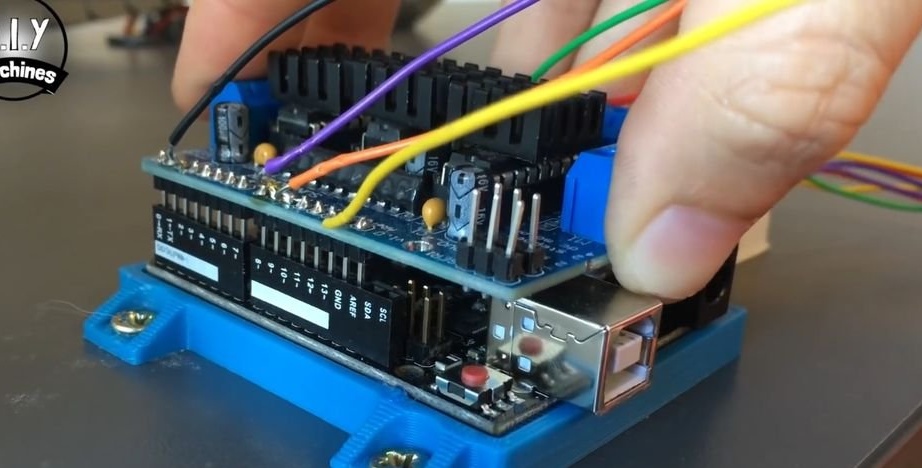
Łączy przewody od sterownika do płyty pilśniowej, jak na zdjęciu.
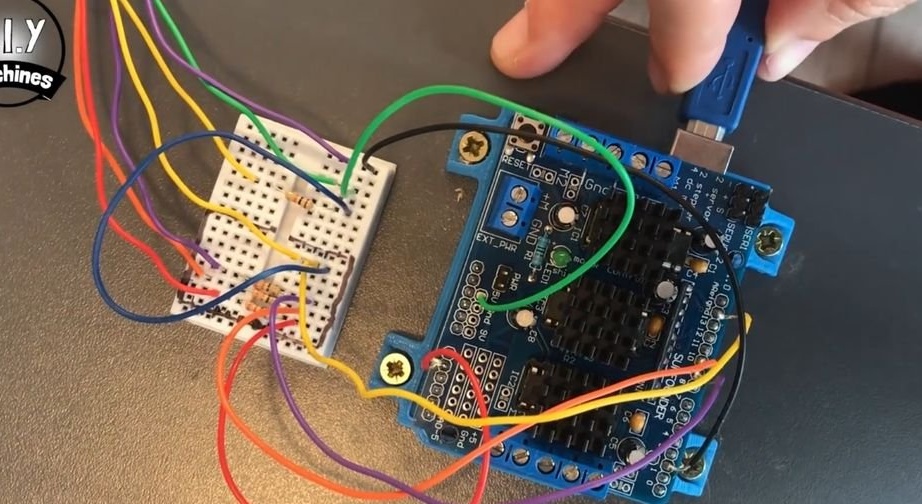
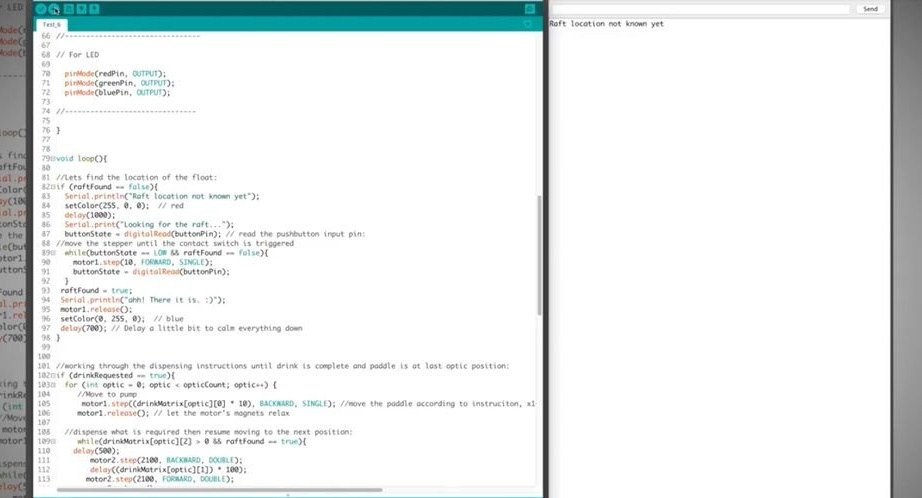
Krok trzynasty: Pobierz kod
Łączy Arduino z komputerem i pobiera kod. Kod można znaleźć tutaj.
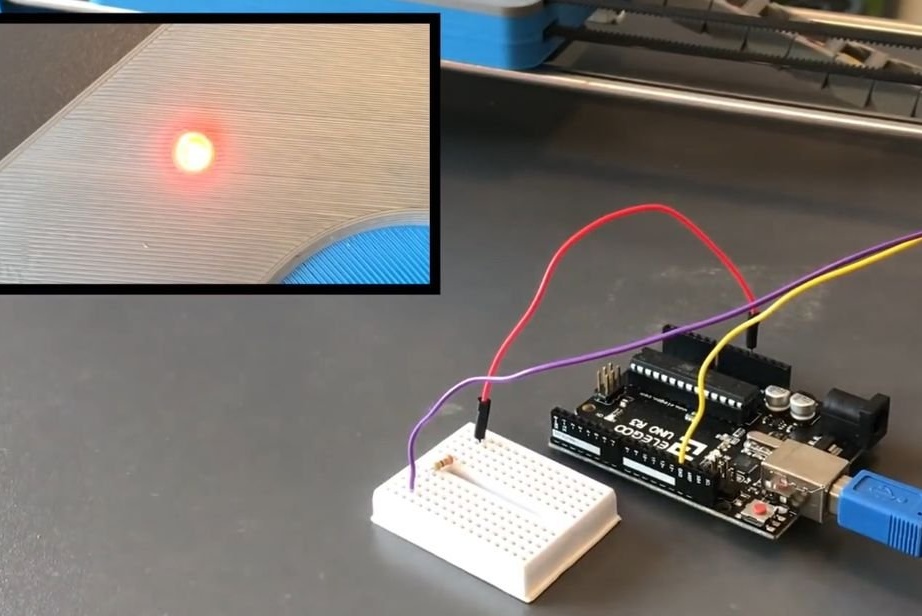
Uruchamia kod testu LED. Dioda LED powinna świecić w różnych kolorach.
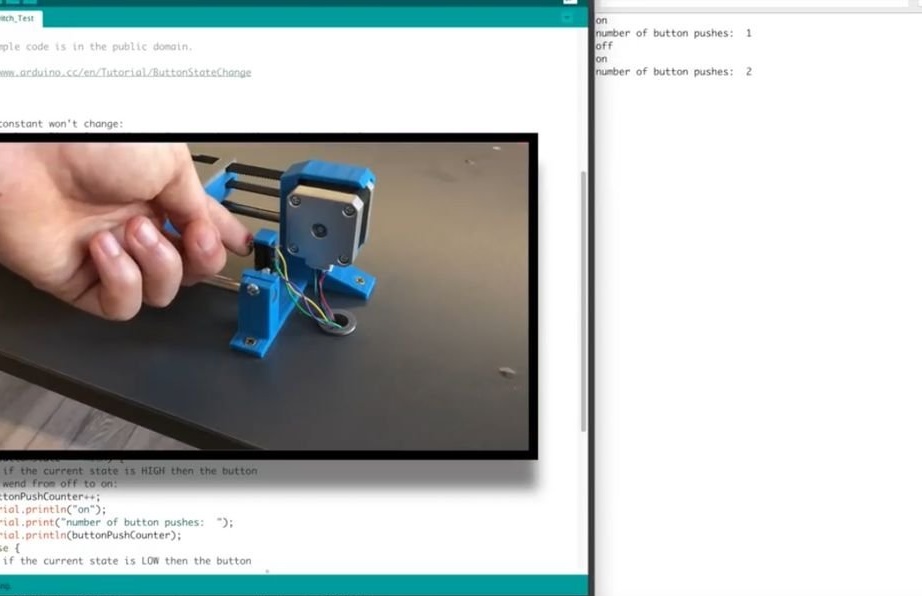
Poniższy skrypt do pobrania to „Contact_switch_test”. Po załadowaniu każde naciśnięcie wyłącznika krańcowego powinno zostać wyświetlone na monitorze.

Krok czternasty: podłączenie silników X i Z.
Zabezpiecza złącze wychodzące z silnika X przez płytkę ścienną na stole. Łączy się z przewodami sterownika.
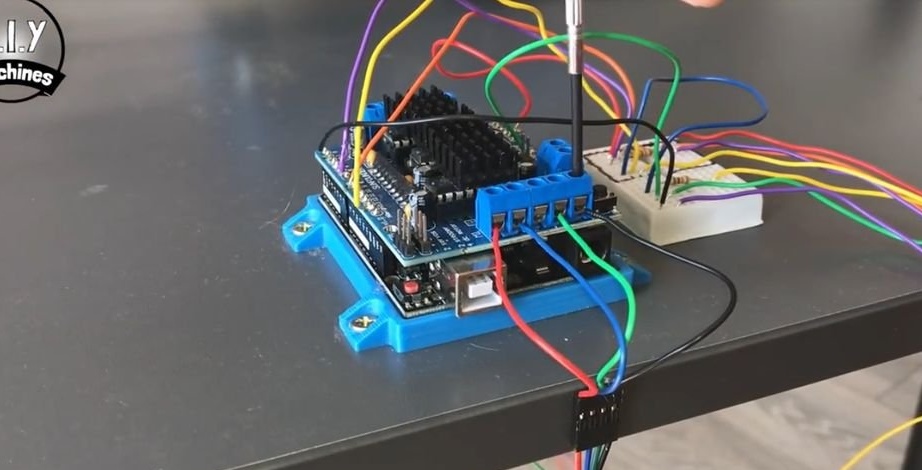
Łączy silniki krokowe osi Z.
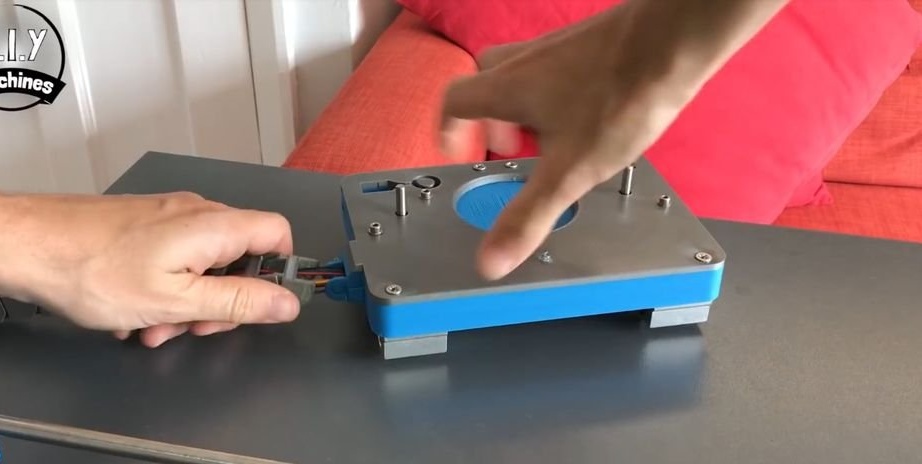
Krok piętnasty: Komora baterii
Usuwa zworkę z modułu. Łączy komorę baterii.
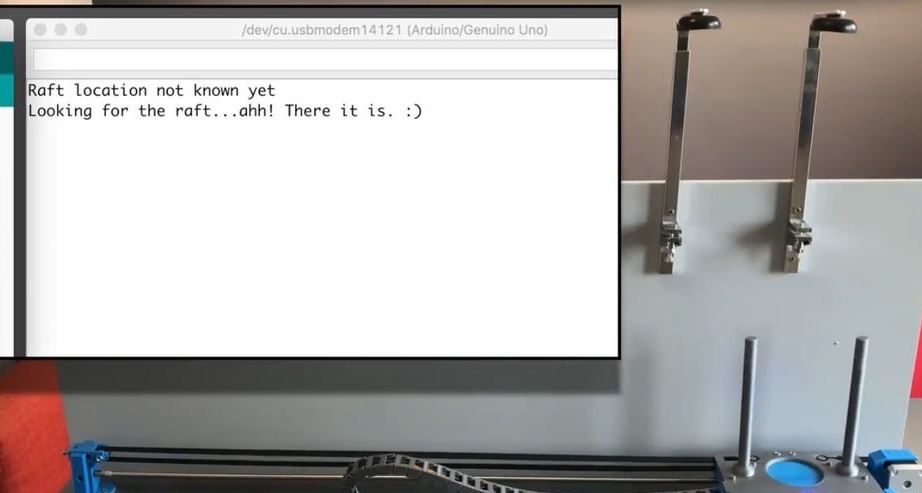
Teraz możesz uruchomić „test 1”. Czerwona dioda LED powinna zaświecić, a platforma powinna dotrzeć do wyłącznika krańcowego. Następnie dioda LED zmieni kolor na zielony.
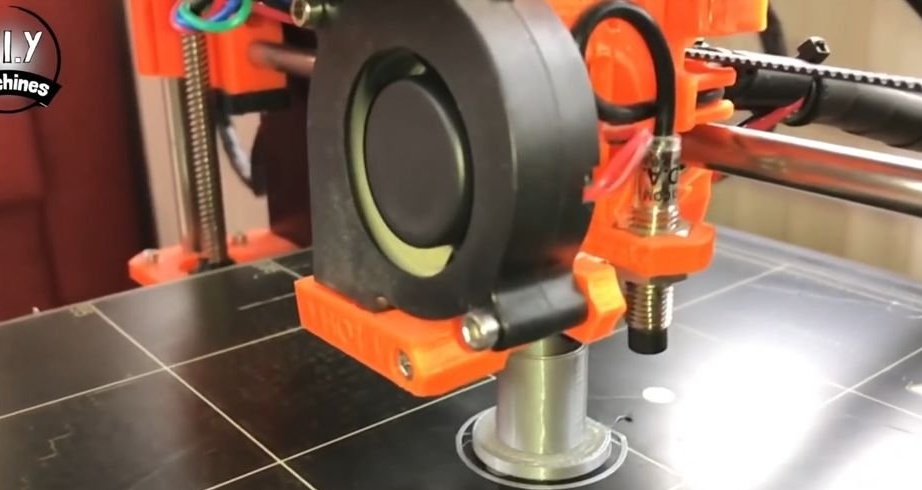
Krok szesnasty: uchwyty na butelki
Użycie wsporników zabezpiecza tylną ścianę płyty MDF.




Następnie przesuwa platformę o 1 cm od wyłącznika krańcowego. Wyrównuje uchwyt szklany i zabezpiecza uchwyt na butelkę z dozownikiem (niestety mistrz nie podał opisu produkcji ani zakupu uchwytu). Dalej uchwyty są mocowane co 12 cm.



Krok siedemnasty: kod, kalibracja, test
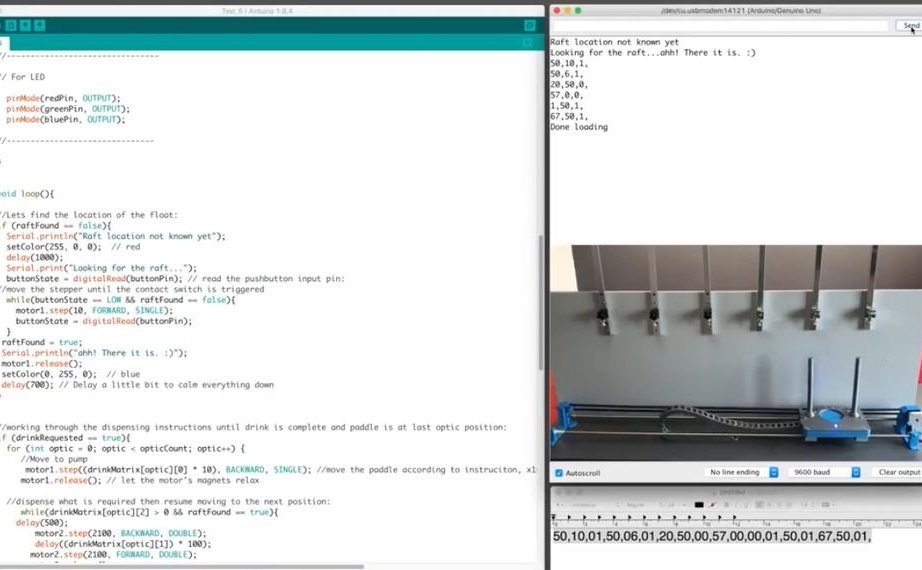
Ładuje główny kod z https://www.thingiverse.com/thing:2478890
W ustawieniu ustawia następujące wartości: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Mistrz ma sześć dozowników. W ustawieniach jest sześć grup po trzy, gdzie pierwsza cyfra to odległość od wyłącznika krańcowego, pierwszy dozownik, drugi dozownik itp., Druga cyfra to czas, w którym napój został wlany do szklanki, trzecia to liczba nalewania. Wszystkie te wartości można zmienić w razie potrzeby.


Pierwszym napojem przygotowanym przez urządzenie była dżin i cola. Aby wyrównać ciśnienie w butelce z colą, musisz zrobić dziurę. Następnie kreator ustaw niezbędne parametry.



Krok osiemnasty: moduł bluetooth
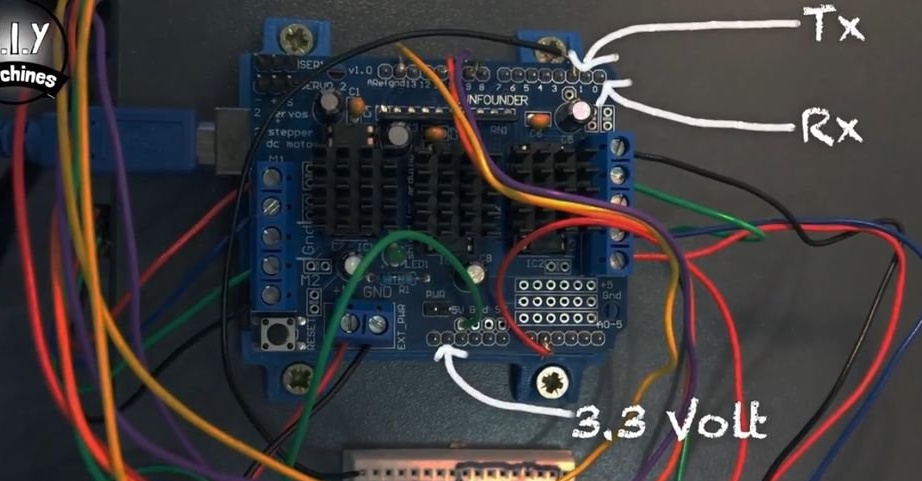
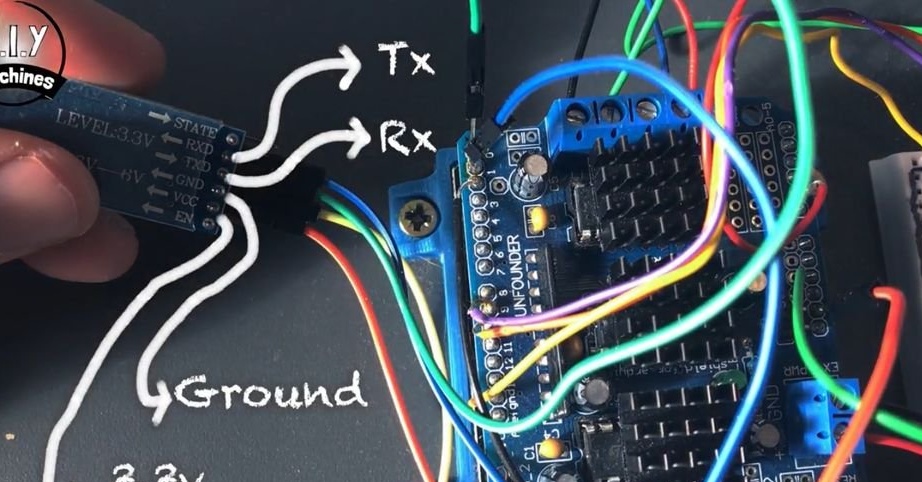
Aby kontrolować barmana z gadżetu, mistrz zainstalował moduł Bluetooth. Moduł łączy się w następujący sposób.
HM10 -> Tarcza Arduino
RXD ------> TX
TXD -------> RX
GND ------> Ziemia
VCC ------> 3,3 V.

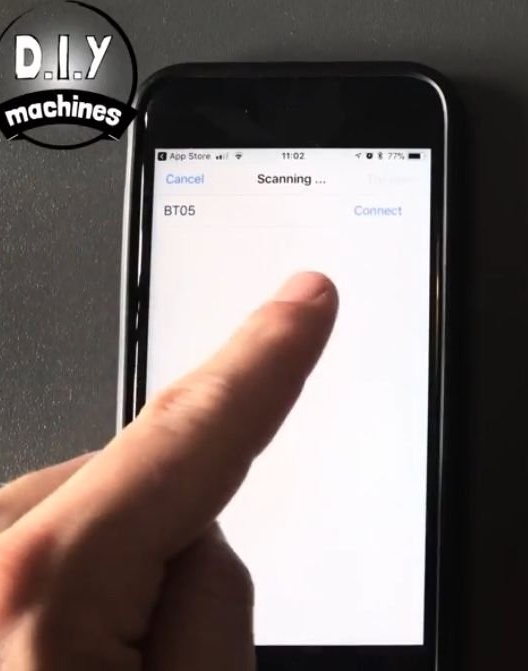
Mistrz ma smartfon z systemem iOS. W tym systemie pobiera „hm10 bluetooth serial lite” ze sklepu z aplikacjami. Następnie ustanawia połączenia i wprowadza ustawienia.

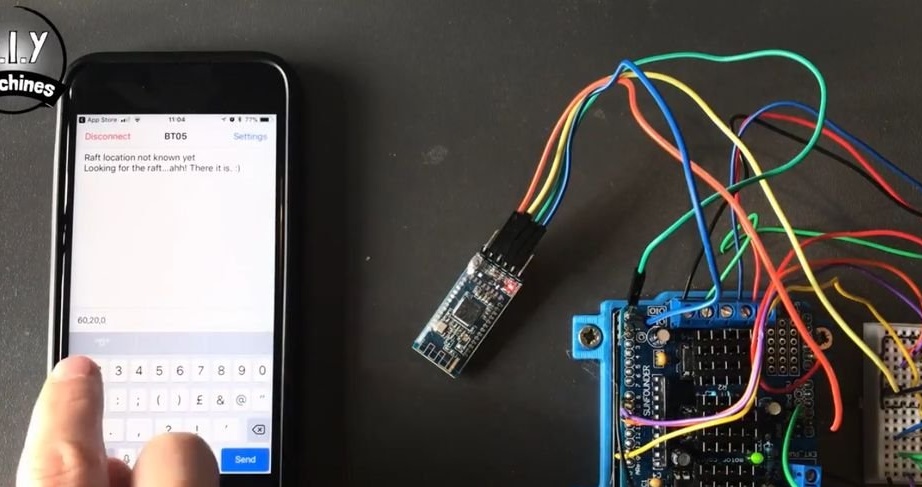
Wszystko jest gotowe, a dla pełniejszych informacji kilka filmów.