
Witam wszystkich miłośników elektroniki. W tym artykule powiem ci, jak zrobić robota wyszukiwarki, który porusza się wzdłuż czarnej linii, którą możesz narysować, jak chcesz. Jestem pewien, że ten zestaw będzie bardzo interesującą zabawką dla tych, którzy go zabiorą.
Nie będę ciągnąć przez długi czas, przejdziemy prosto do produkcji.
Przed przeczytaniem artykułu proponuję obejrzeć wideo ze szczegółowym procesorem montażu dla tego zestawu, a także z kontrolami jego wydajności.
Aby zrobić robota wyszukiwarki, który będzie podróżował wzdłuż czarnej linii zrób to sambędziesz potrzebować:
* Zestaw
* Lutownica, lut, topnik
* Noże boczne
* Multimetr
* Fixture do lutowania „trzeciej ręki”
* Szczypce
* Wkrętak krzyżakowy
Pierwszy krok
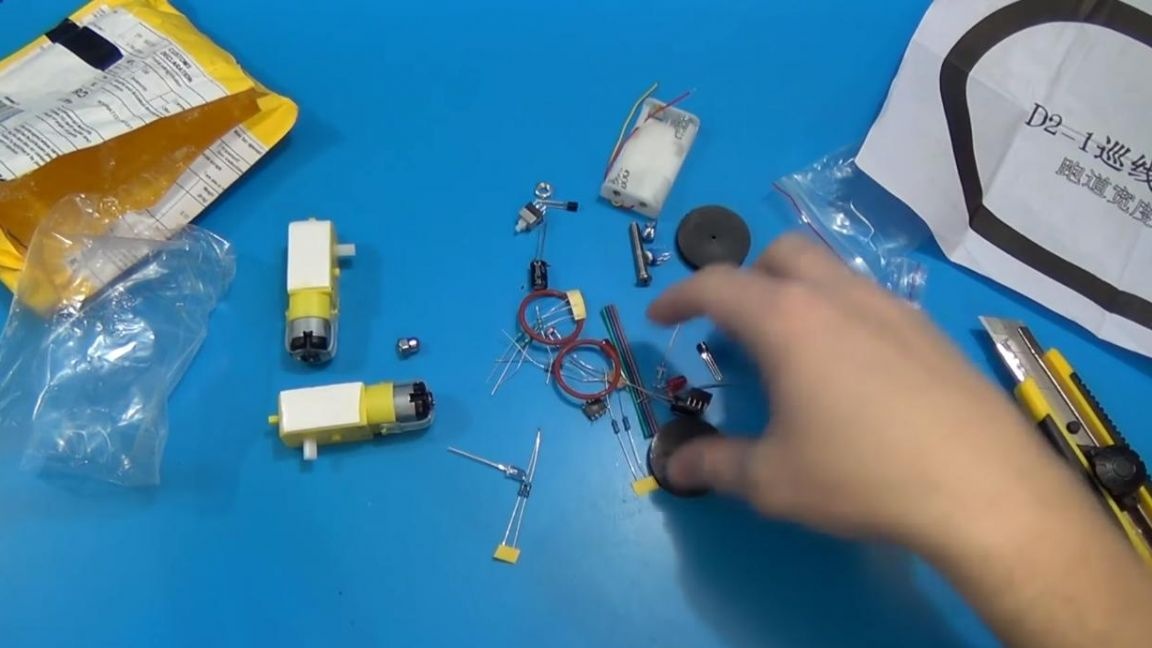
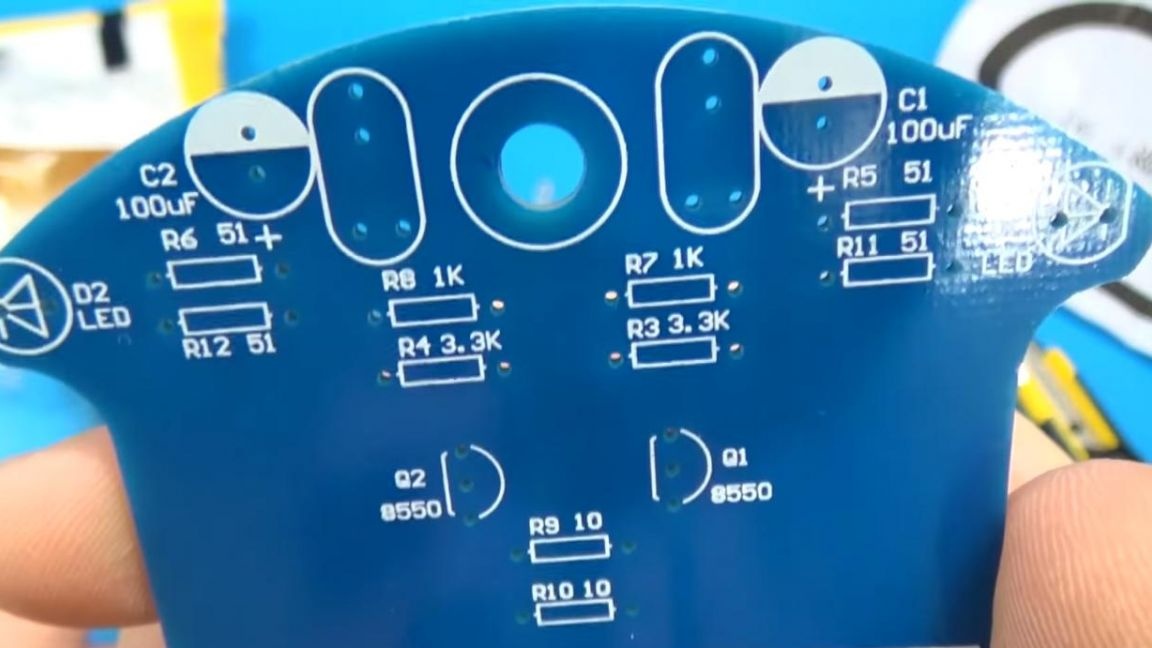
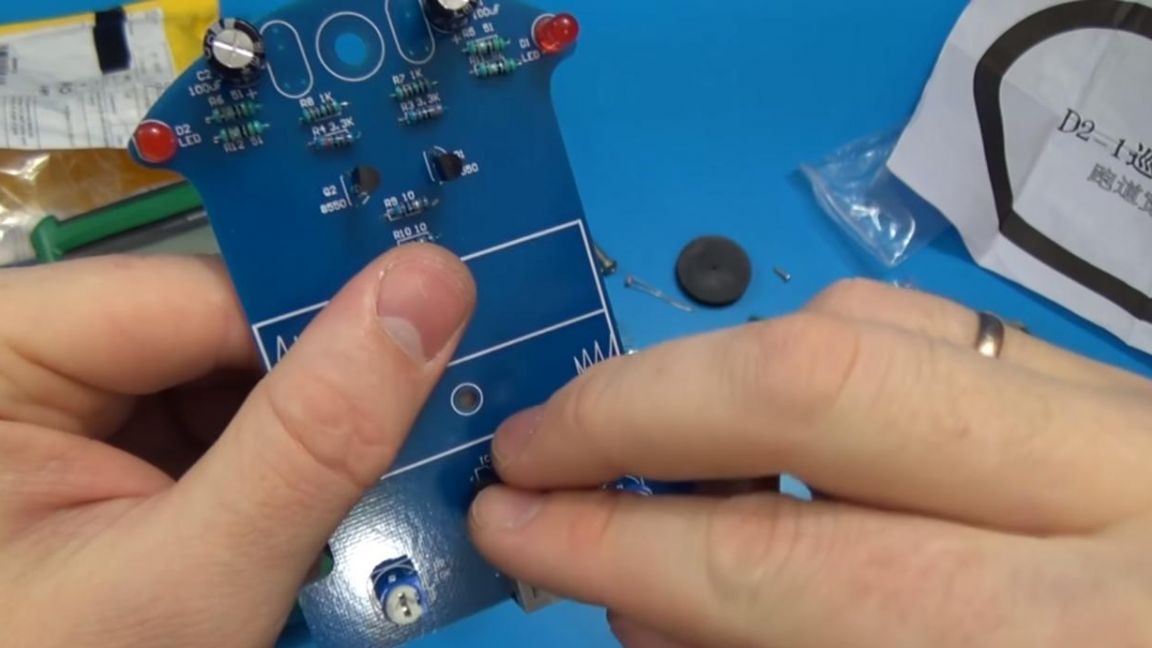
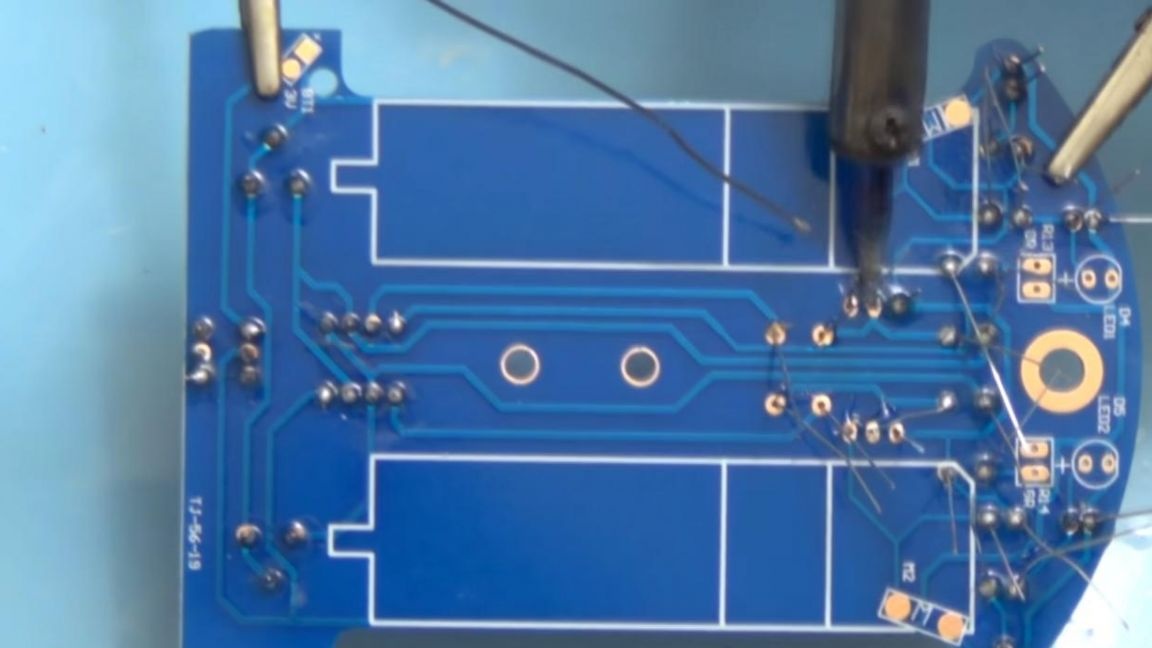
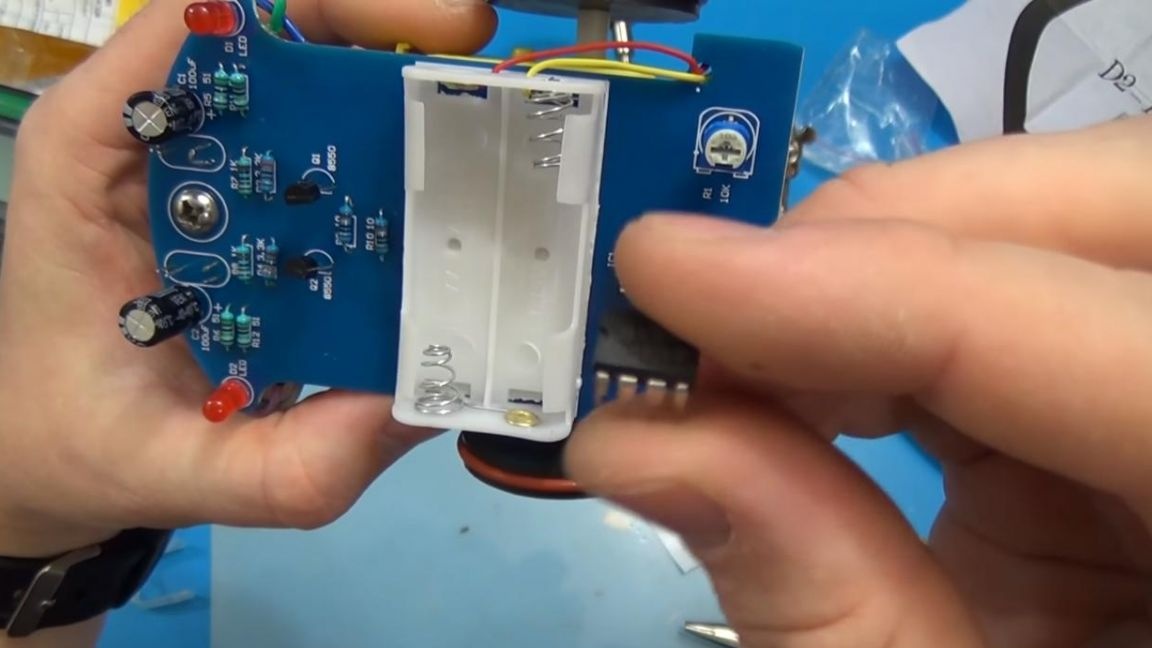
Przede wszystkim musisz umieścić wszystkie elementy na płycie, zestaw zawiera zarówno rezystory, kondensatory, jak i tranzystory.
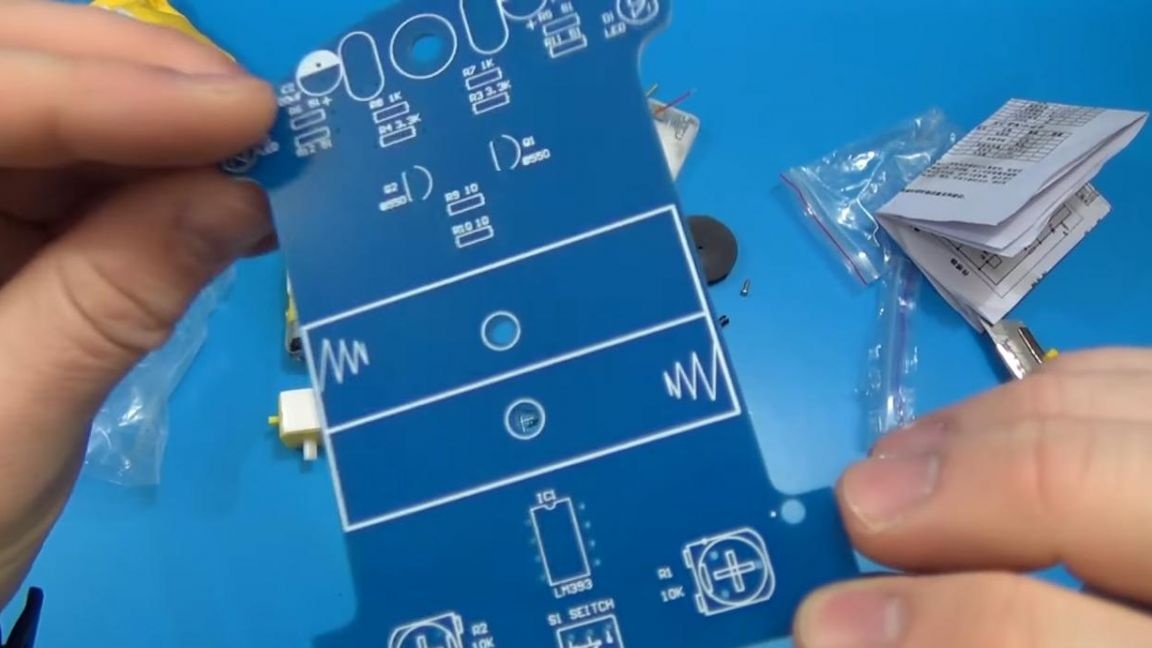
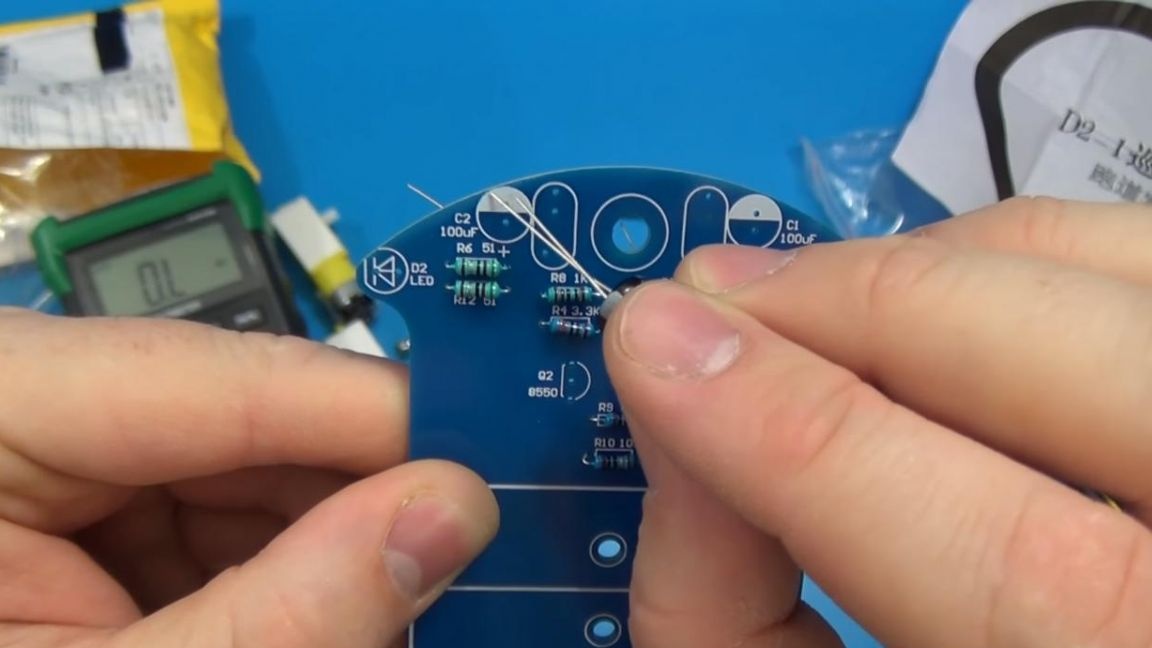
Najpierw musisz zainstalować rezystory w ich miejscach, których wartość nominalna jest wskazana na płycie, a same rezystory są oznaczone kolorami, dzięki którym można określić rezystancję pojedynczego rezystora. Opór można również zmierzyć za pomocą multimetru, ta metoda będzie szybsza, ale to nie znaczy, że jest to konieczne. Ustawiamy rezystory na płycie zgodnie z ich wartością nominalną, lekko zginamy zaciski na odwrotnej stronie, odbywa się to tak, aby nie wypadły podczas lutowania.

Krok drugi
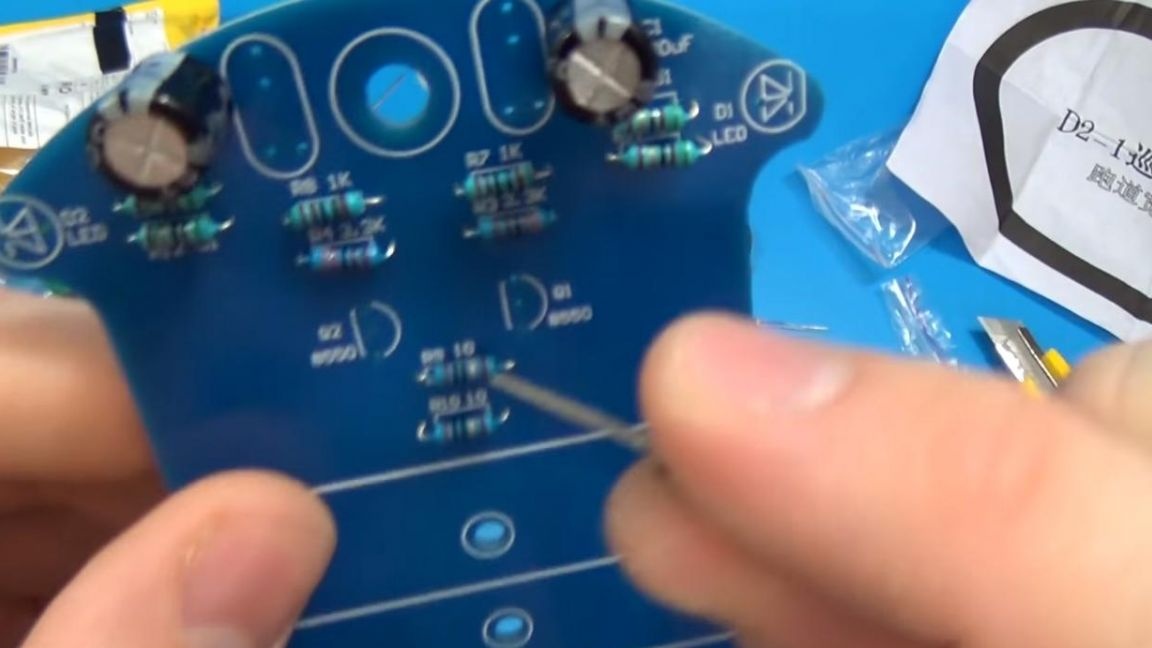
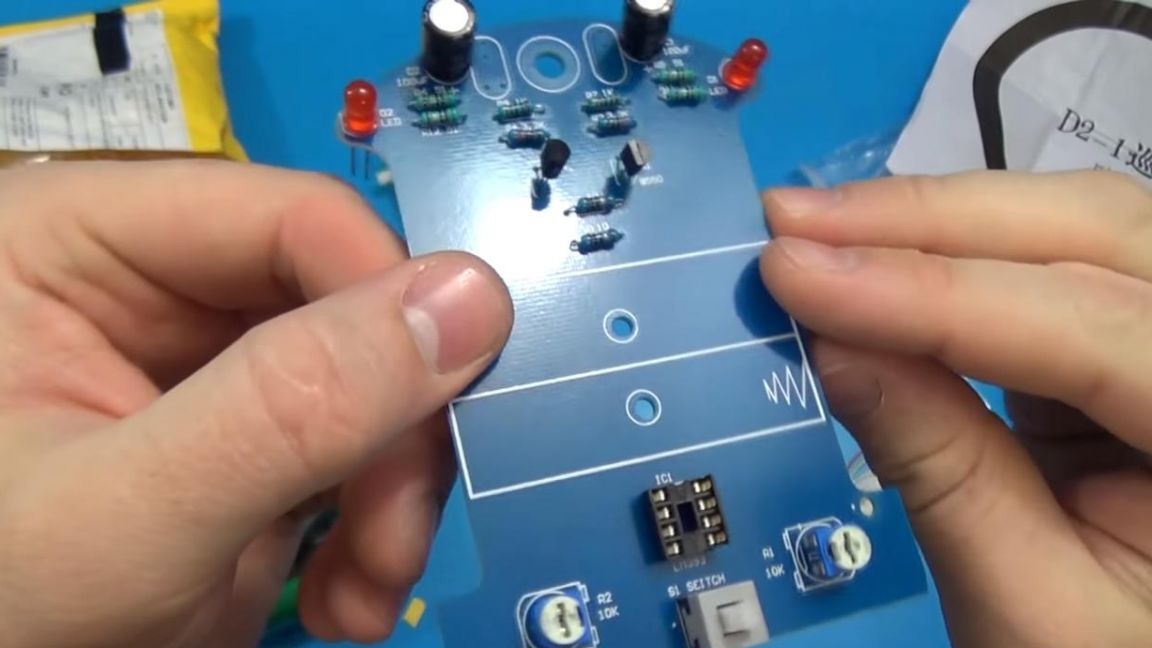
Rezystory są na miejscu, a za nimi kondensatory, w przeciwieństwie do poprzednich komponentów, mają biegunowość. Minus kondensatora jest oznaczony na obudowie białym paskiem z kreską; na płytce minus jest oznaczony zacienionym białym półkolem.
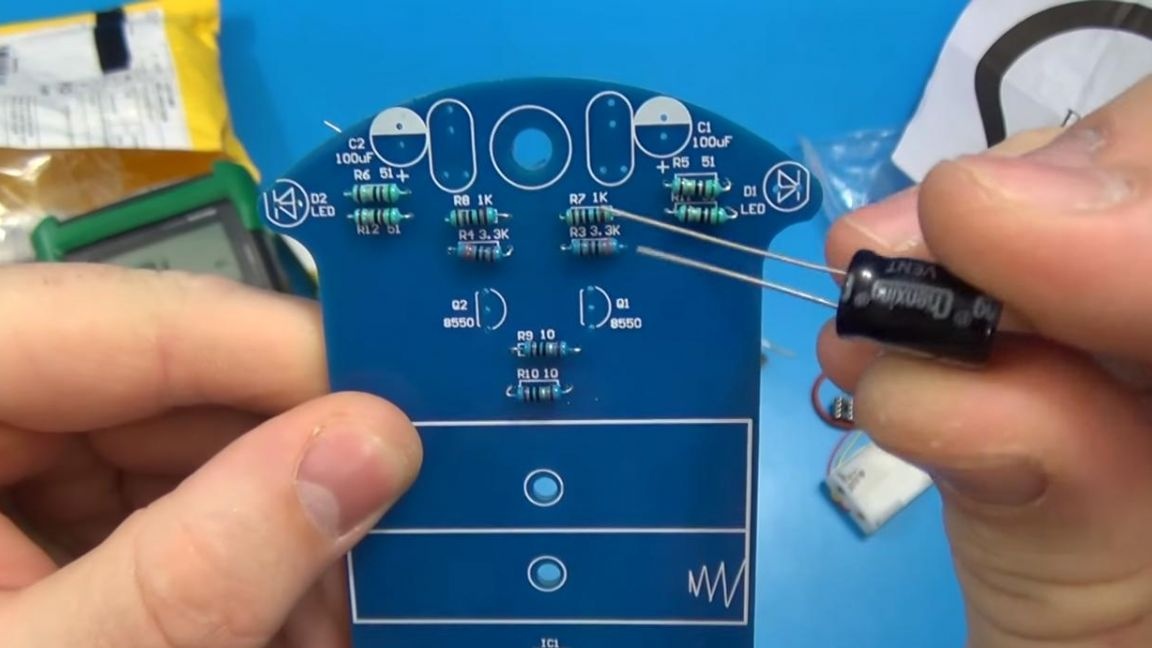
Kiedy kondensatory są na swoich miejscach, zwracamy się do tranzystorów, są one dla nas takie same, więc nie możemy się ze sobą mieszać. Aby prawidłowo umieścić je na płycie, musisz połączyć płaską część tranzystora z kreską na płycie.
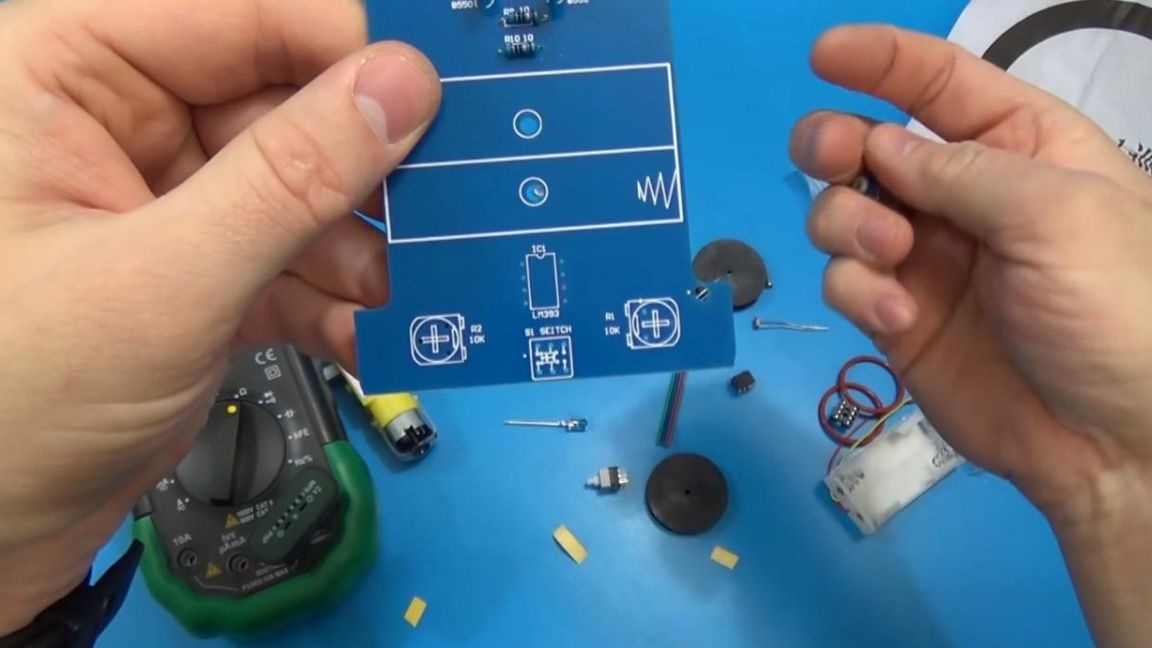
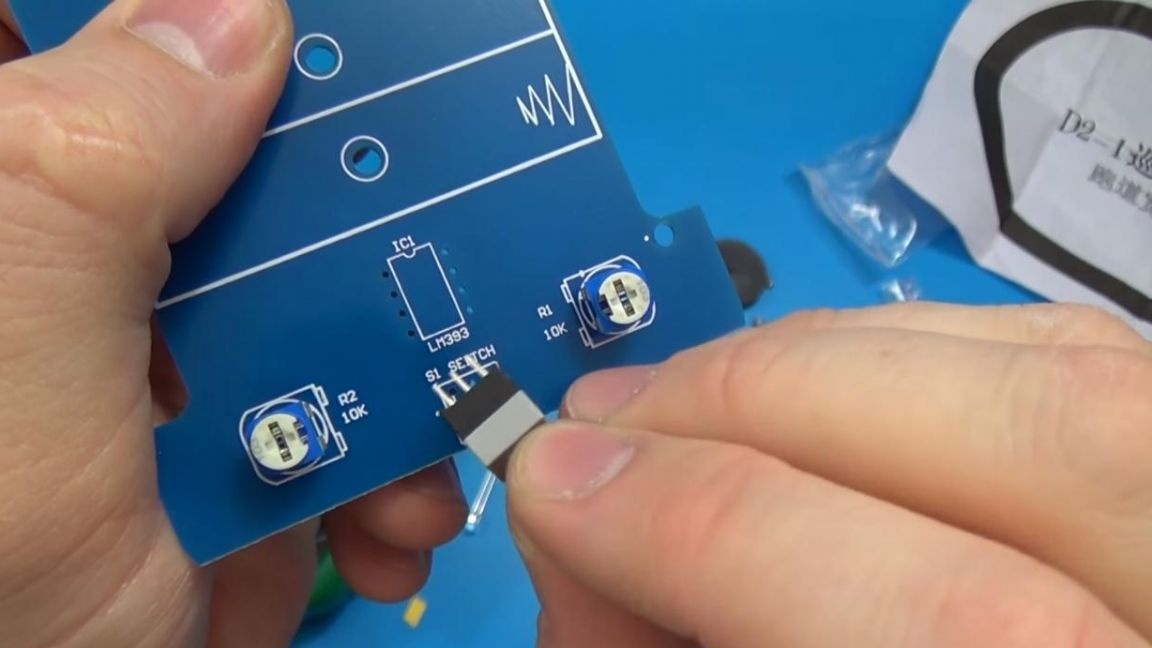
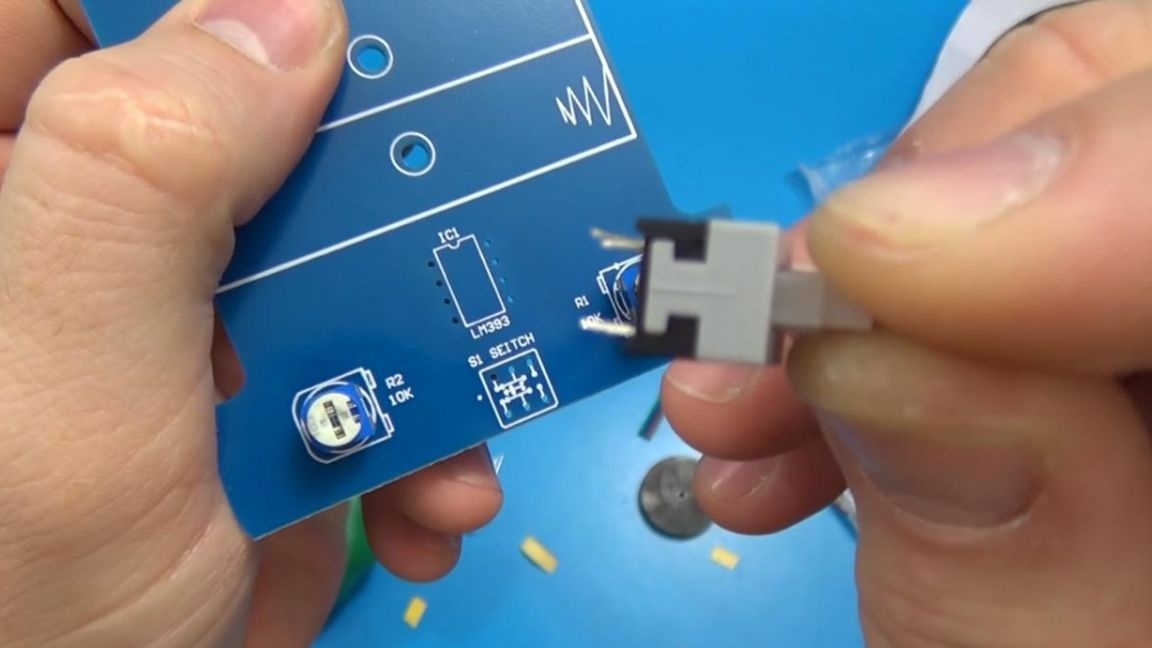
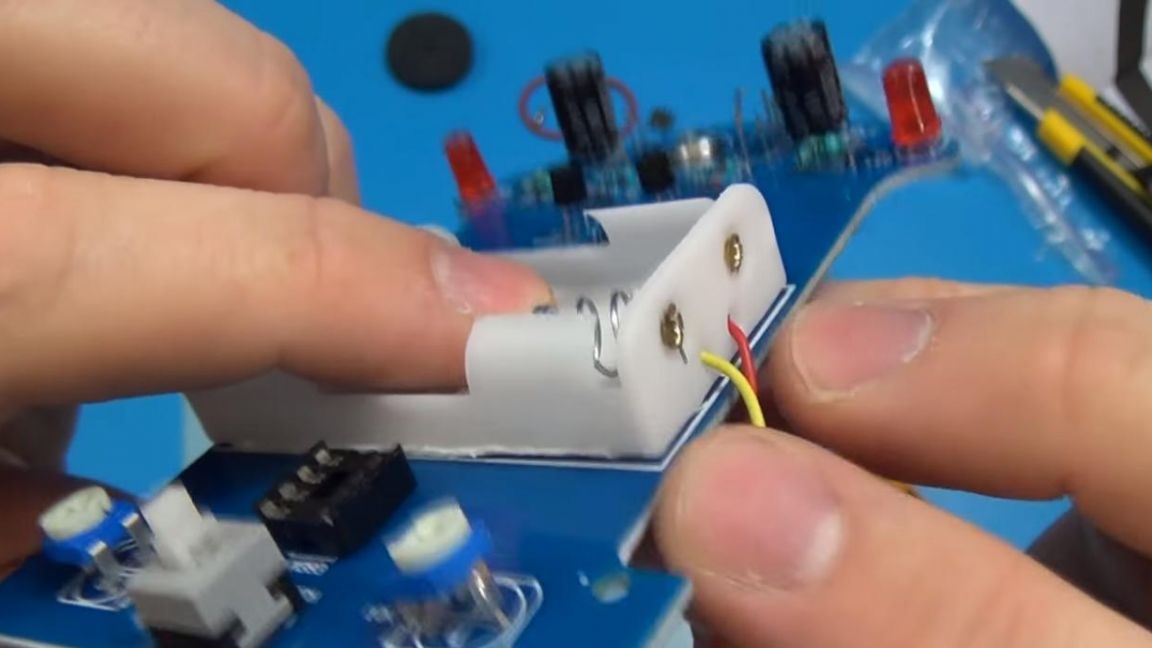
Następnie instalujemy dwa rezystory tuningowe, w związku z lokalizacją zacisków nie będzie działać, aby umieścić je nieprawidłowo, co jest dobre. Umieszczamy również przycisk zasilania, jest on-wyłączony, to znaczy, może być w pozycji włączonej lub wyłączonej, jego prawidłowe położenie odpowiada zbieżności położenia paska na samym przycisku z punktem na planszy.
Krok trzeci
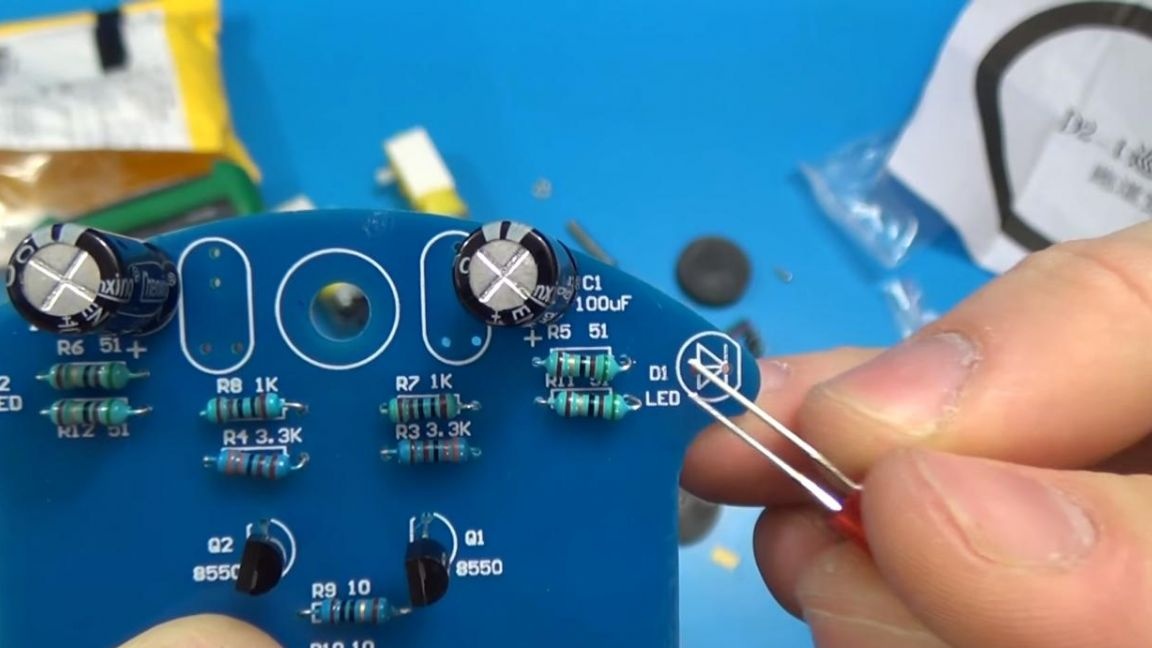
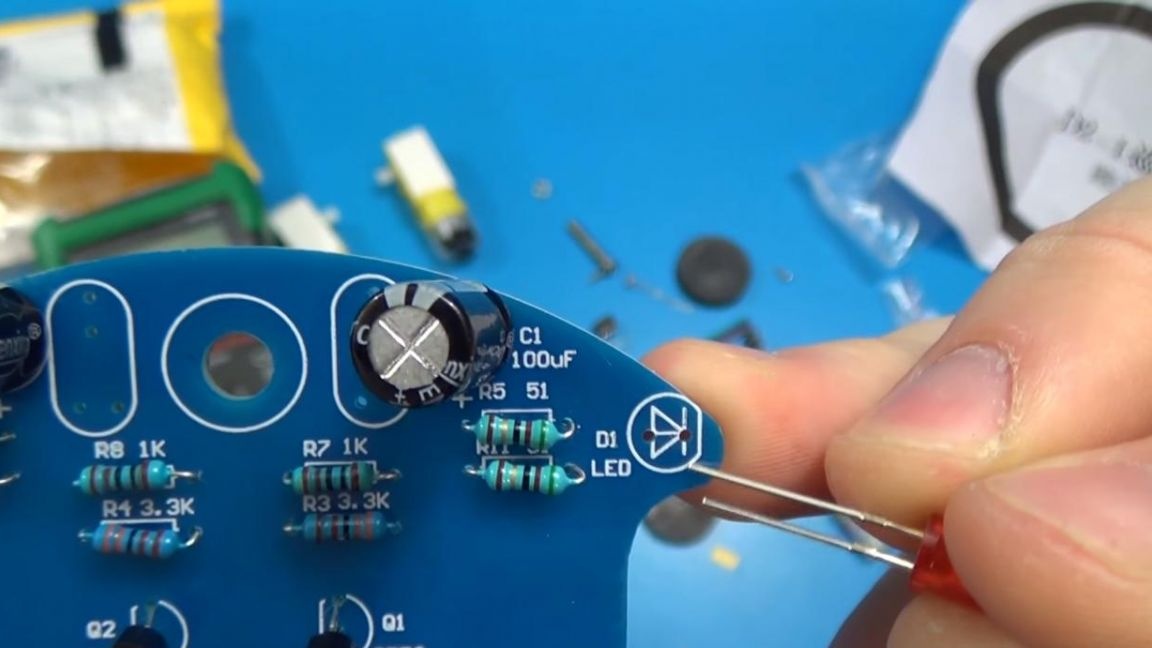
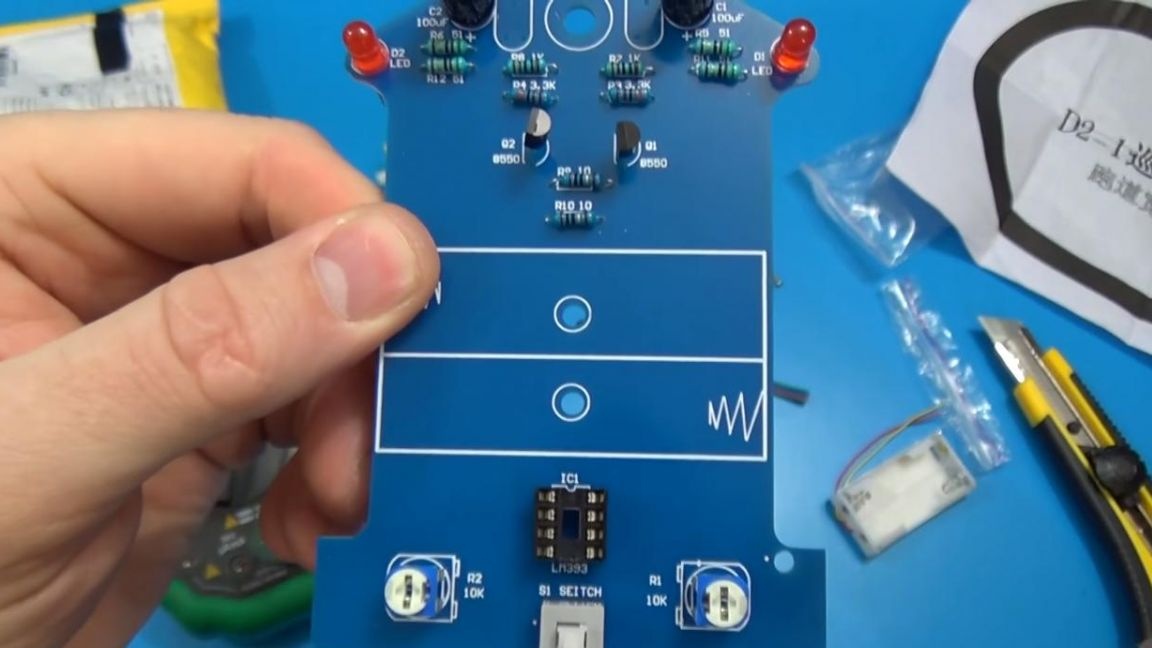
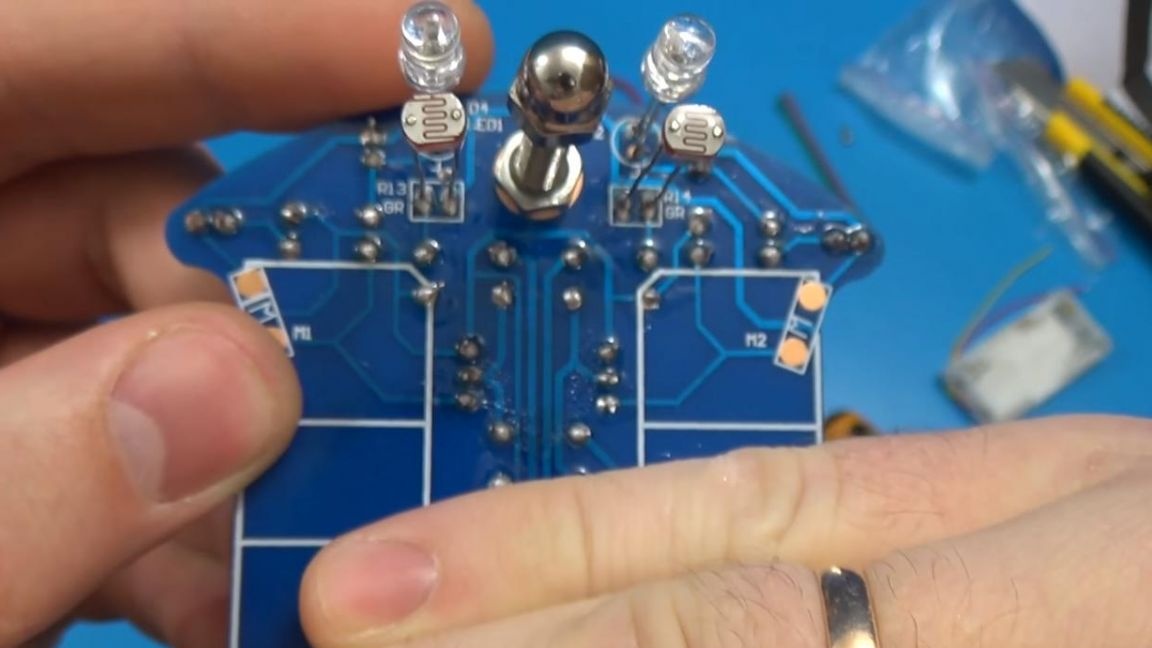
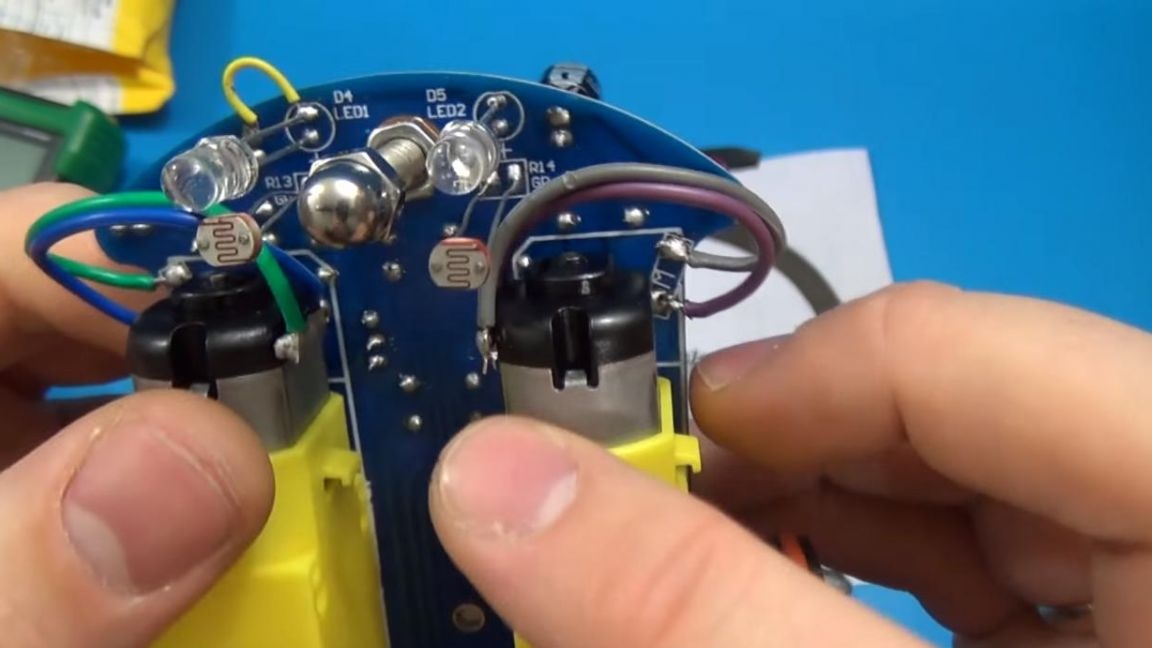
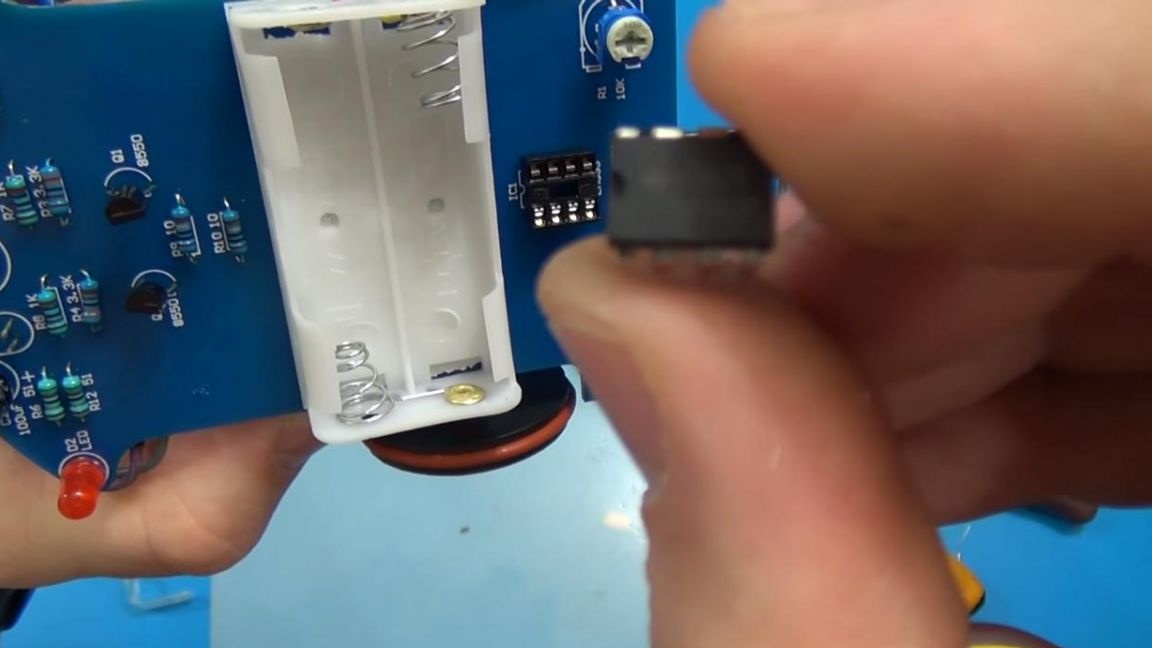
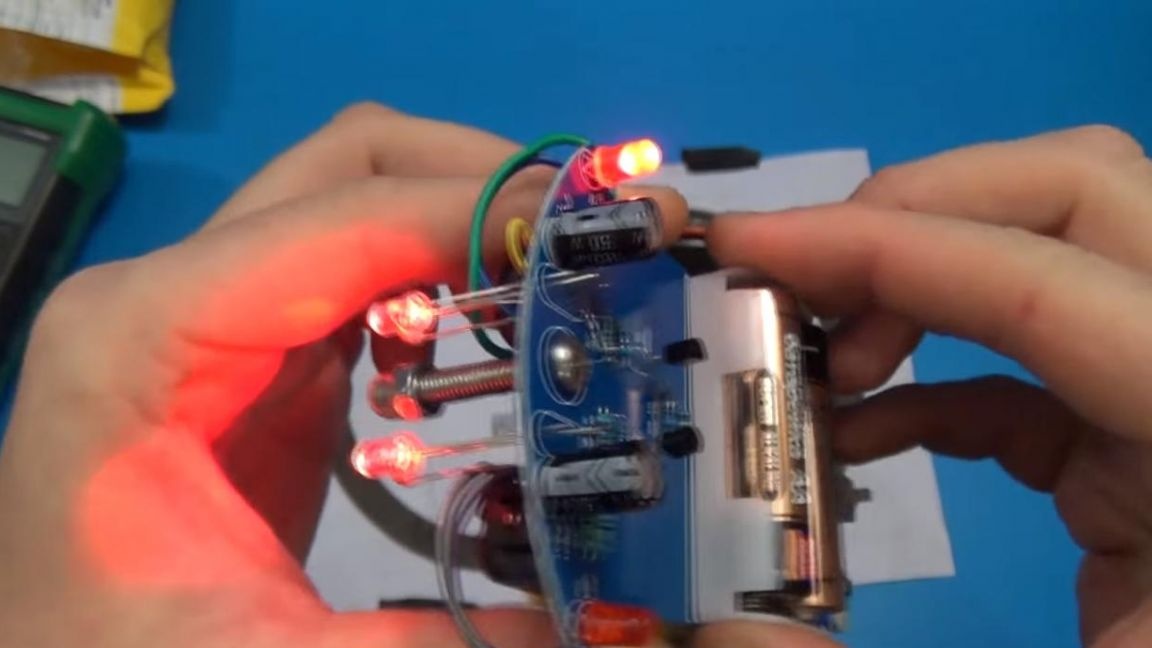
Czas zająć się diodami LED, w zestawie są cztery, dwie czerwone i dwie białe. Na płytce plus jest oznaczony trójkątem, na diodzie LED jest długim wyjściem, z minusem wszystko jest jasne. Na górze umieszczamy czerwone diody LED, które są analogami „kierunkowskazów”.Dla mikroukładu jest osobne miejsce, wkładamy tam złącze, więc jego wymiana w takim przypadku będzie znacznie łatwiejsza, ale styki nie będą się przegrzewać podczas lutowania.

Krok czwarty
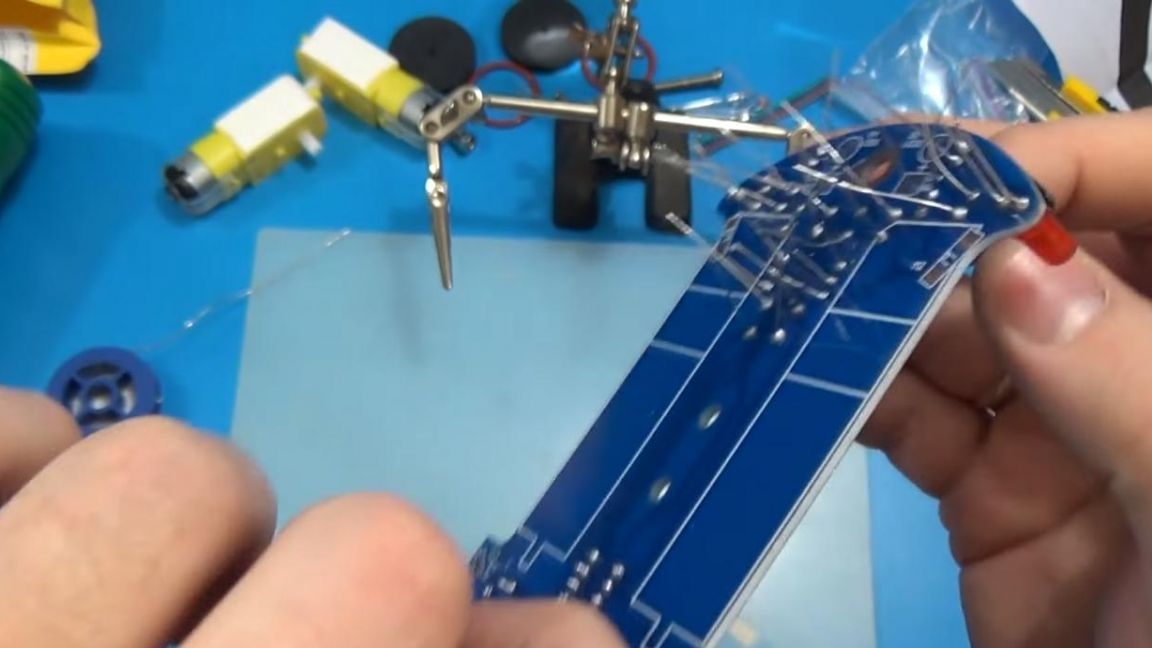
Czas lutować elementy umieszczone na płytce, przymocować do urządzenia do lutowania z trzeciej ręki, zastosować topnik i lut, lekko zasilając lut.
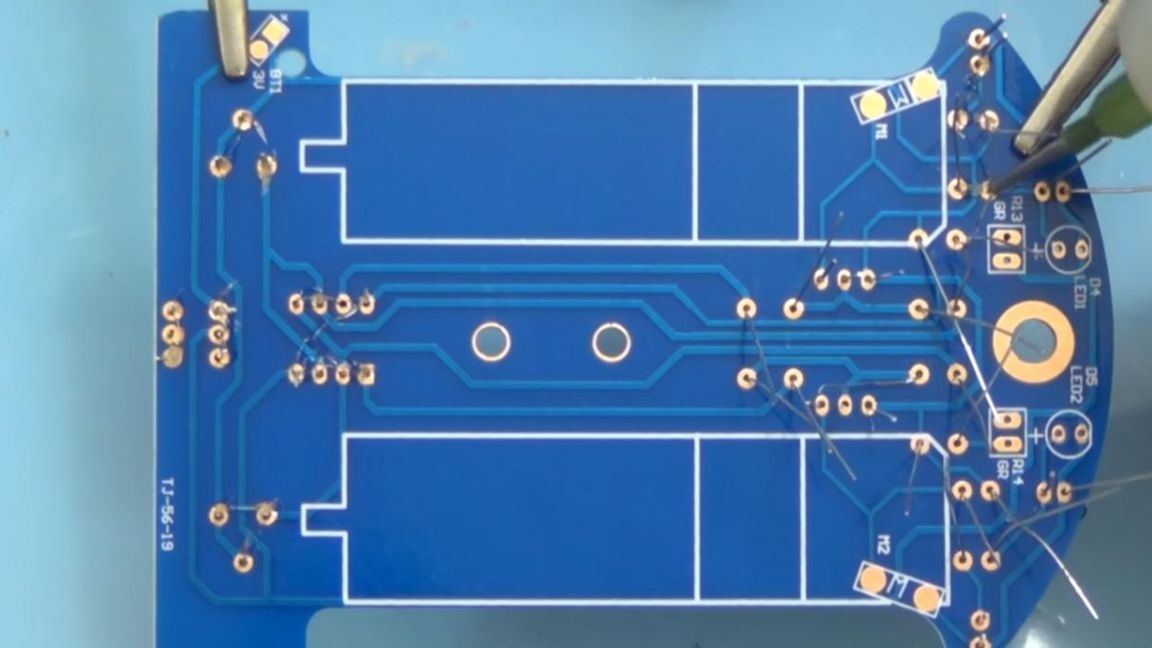
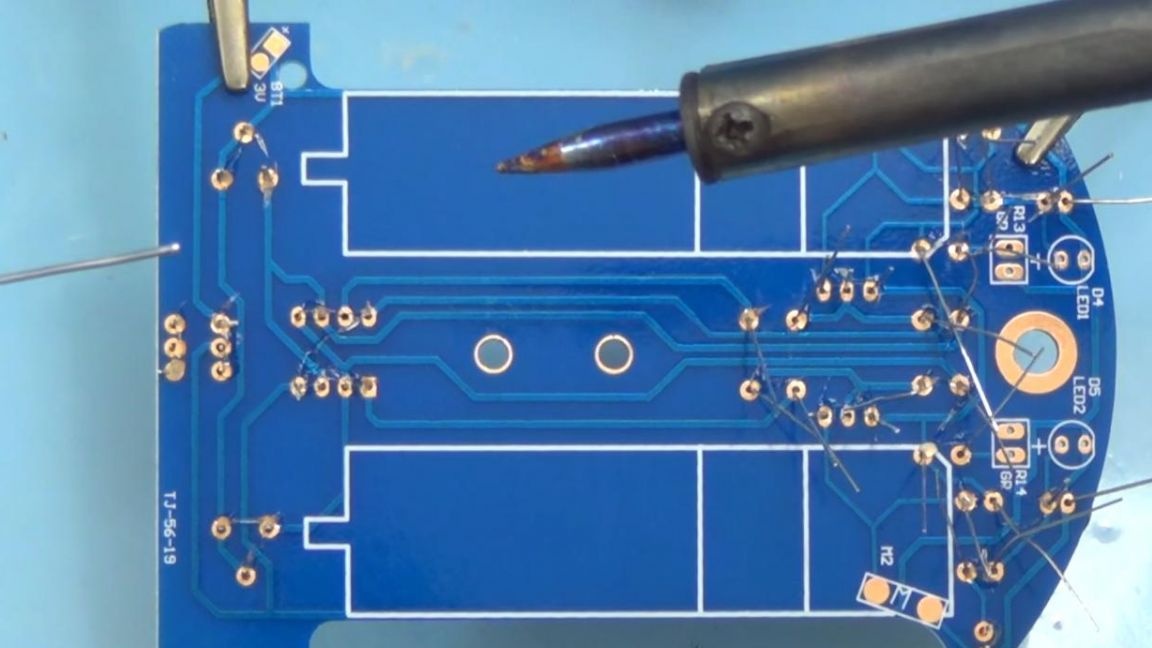
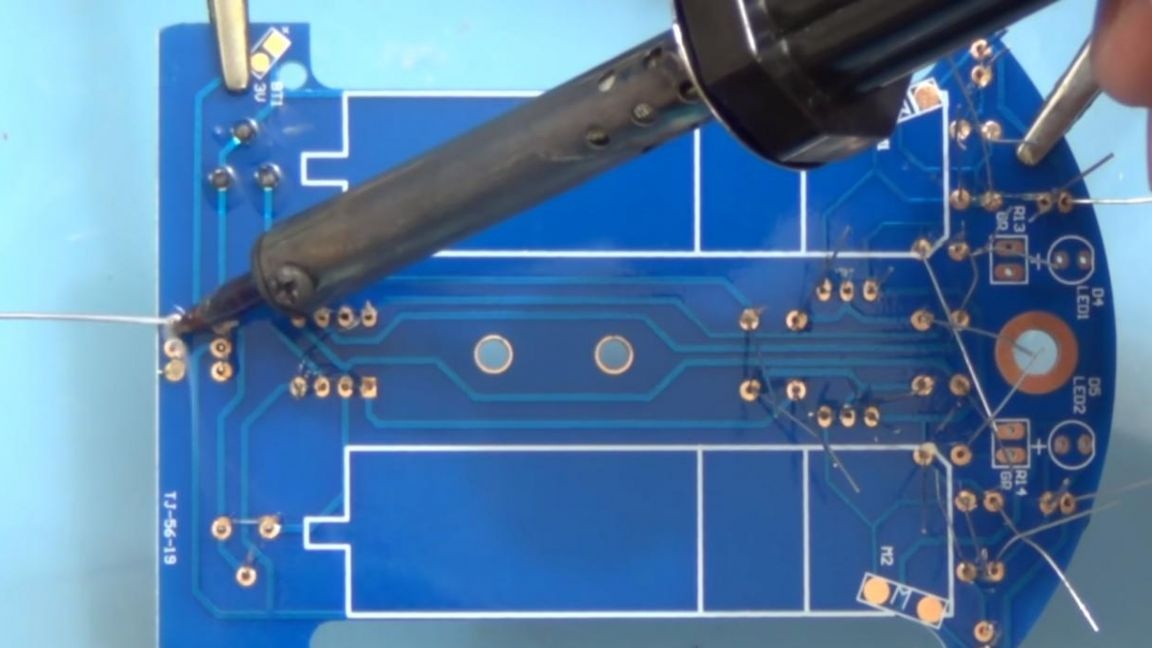
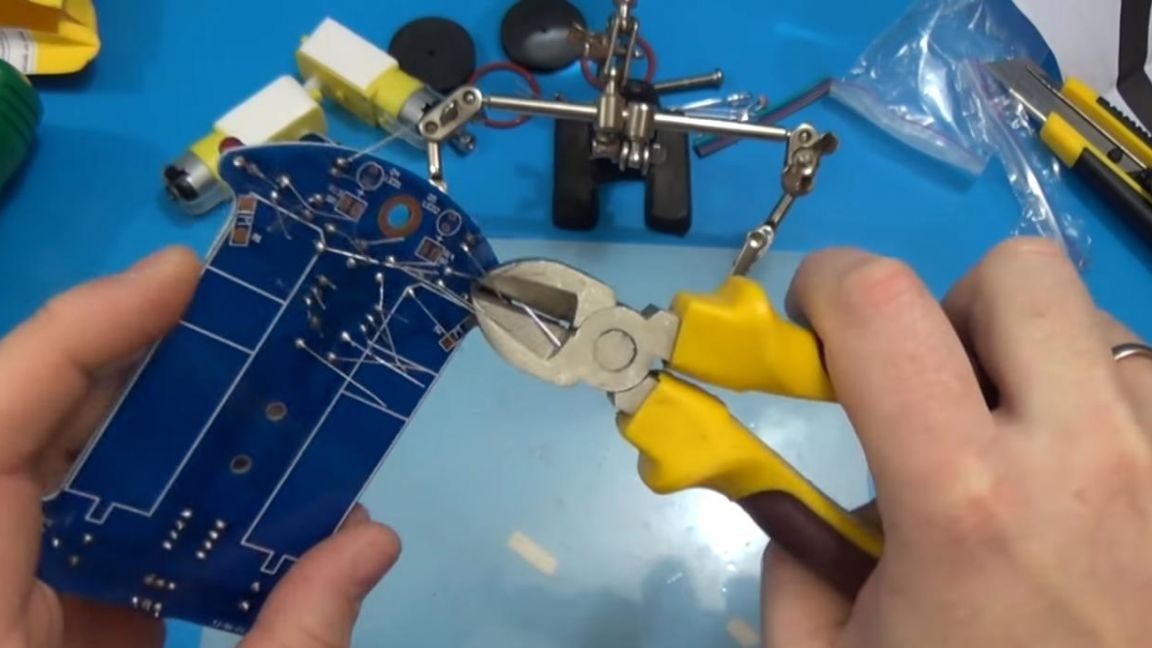
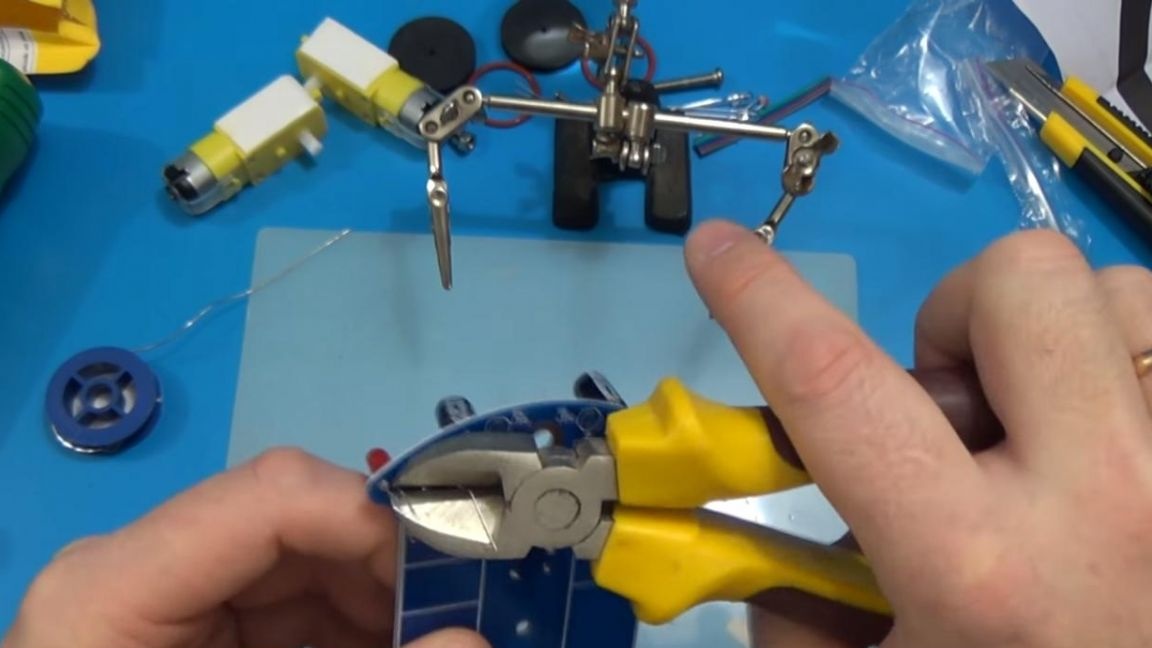
Po lutowaniu usuwamy resztki wniosków za pomocą obcinaków bocznych, ale należy zachować ostrożność, ponieważ oderwanie podkładek kontaktowych, a także samych ścieżek, jest na tym etapie najłatwiejsze.
Krok piąty
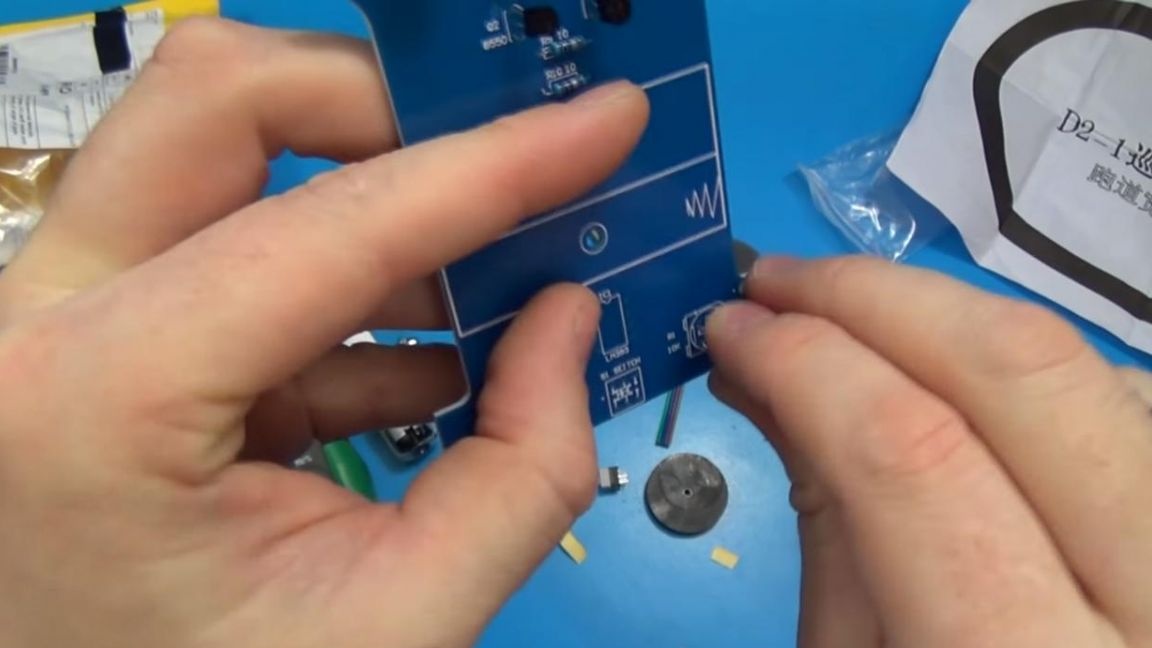
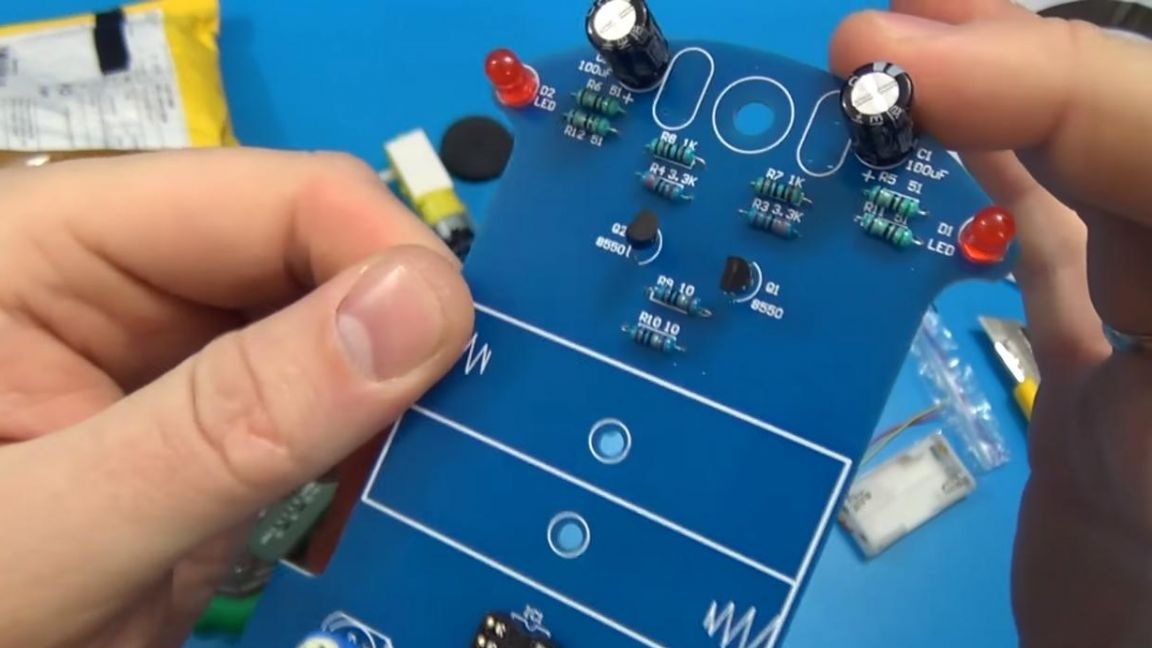
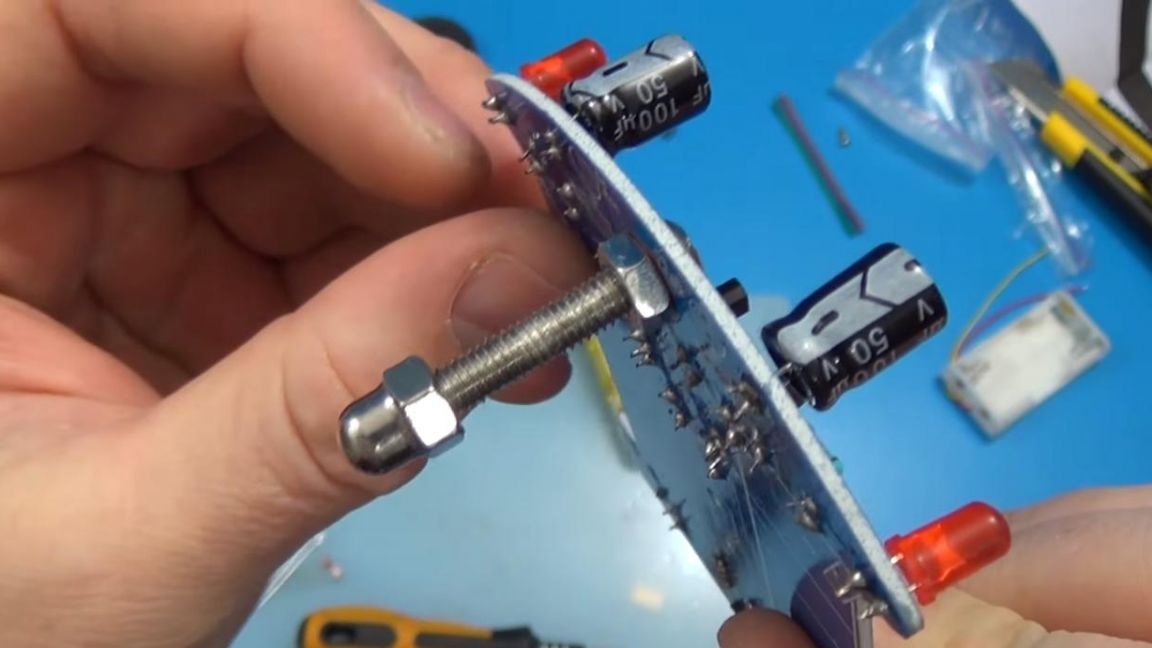
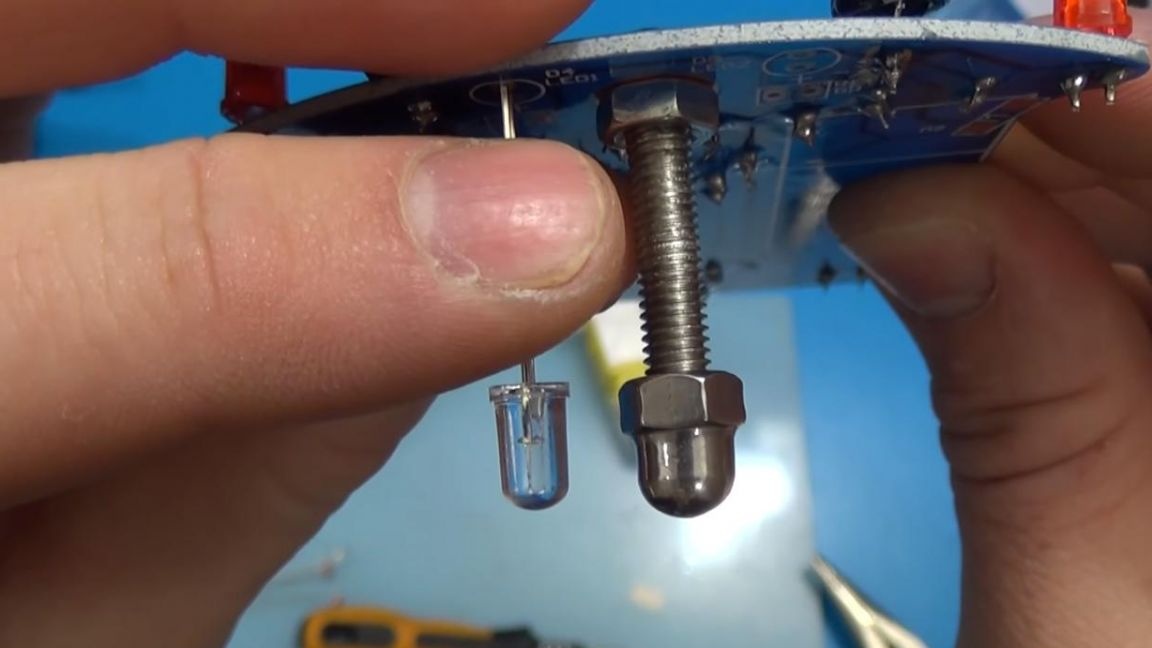
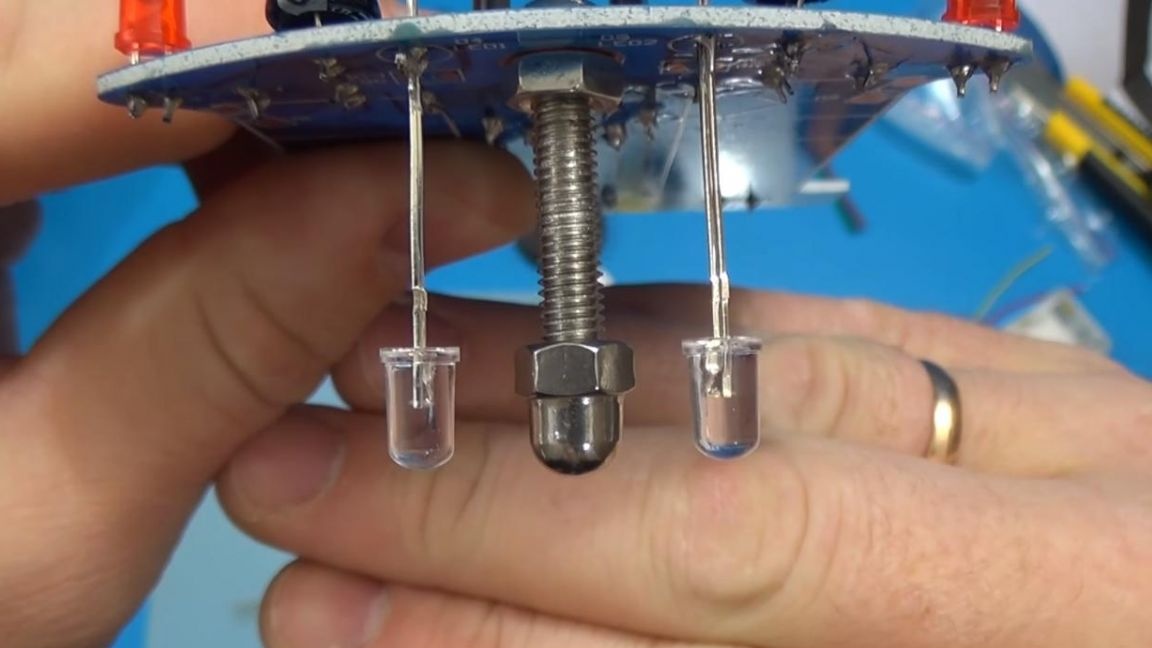
Teraz przykręcamy śrubę do płyty i instalujemy białe diody LED obok niej, ich odległość powinna być o 1-2 mm mniejsza niż przedłużenie śruby, można to wyraźnie zobaczyć na zdjęciu, jeśli nie zostanie to zaobserwowane, wówczas fotorezystory będą działać gorzej lub w ogóle nie działać .

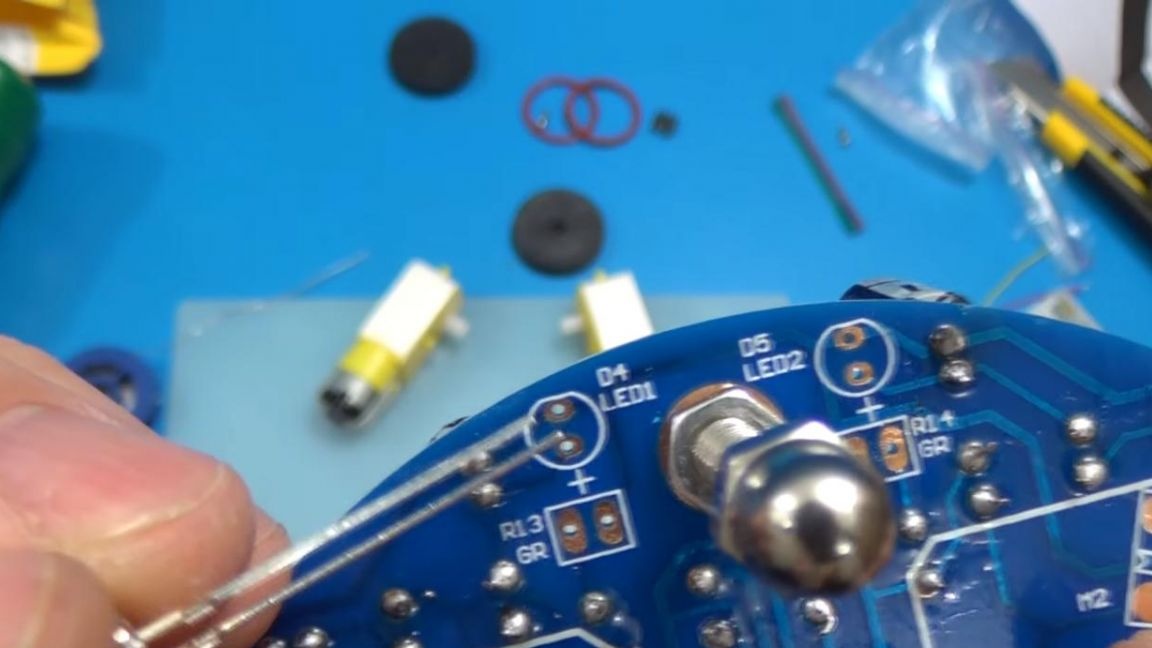
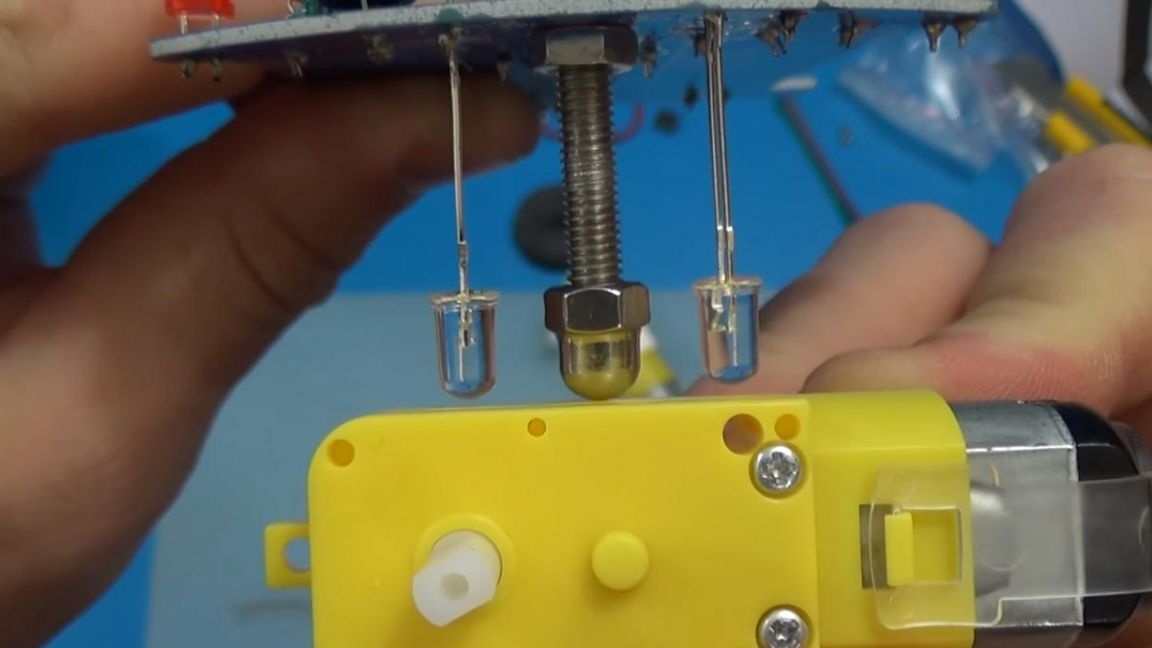
Obok płytki lutujemy fotorezystory w tej samej odległości co diody LED.

Krok szósty
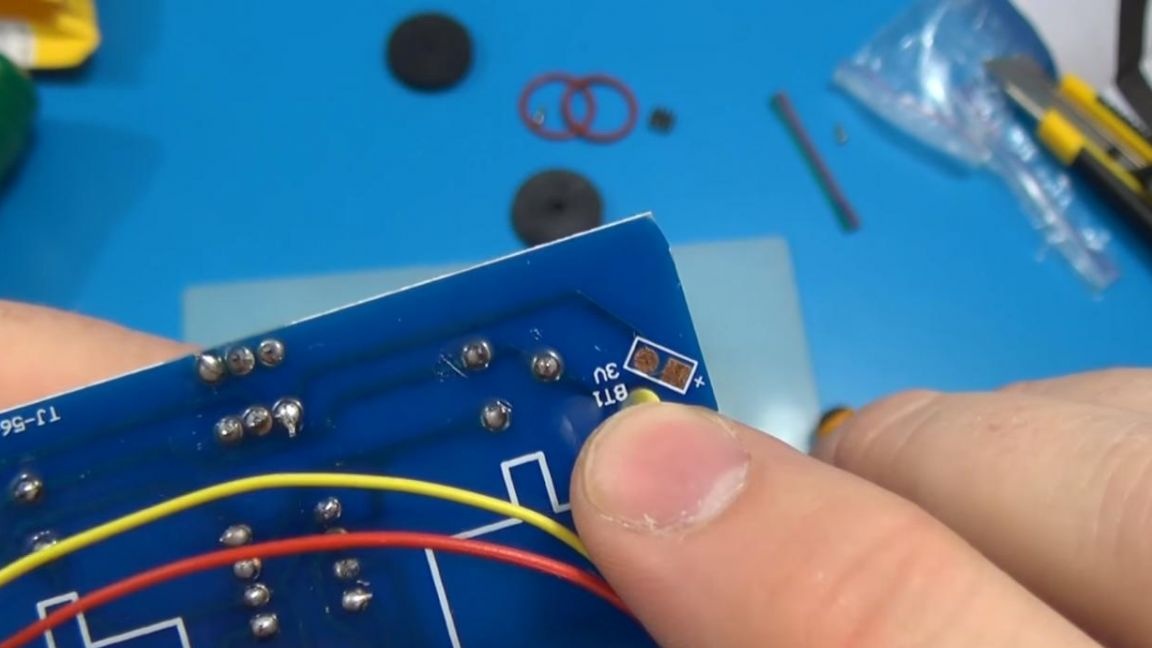
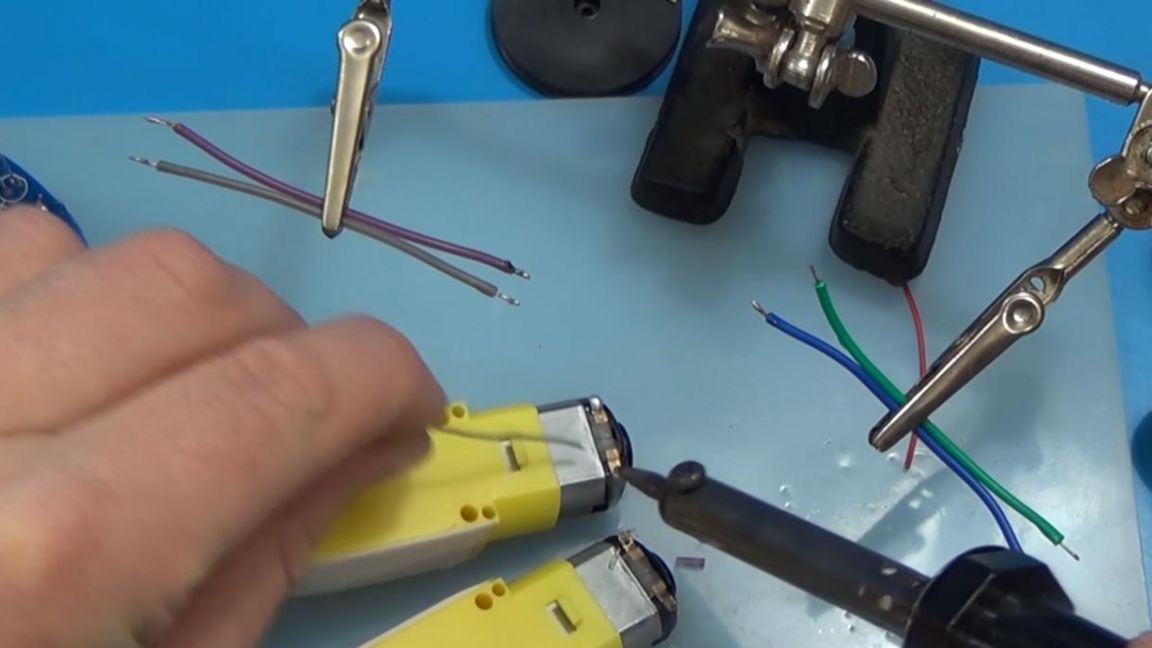
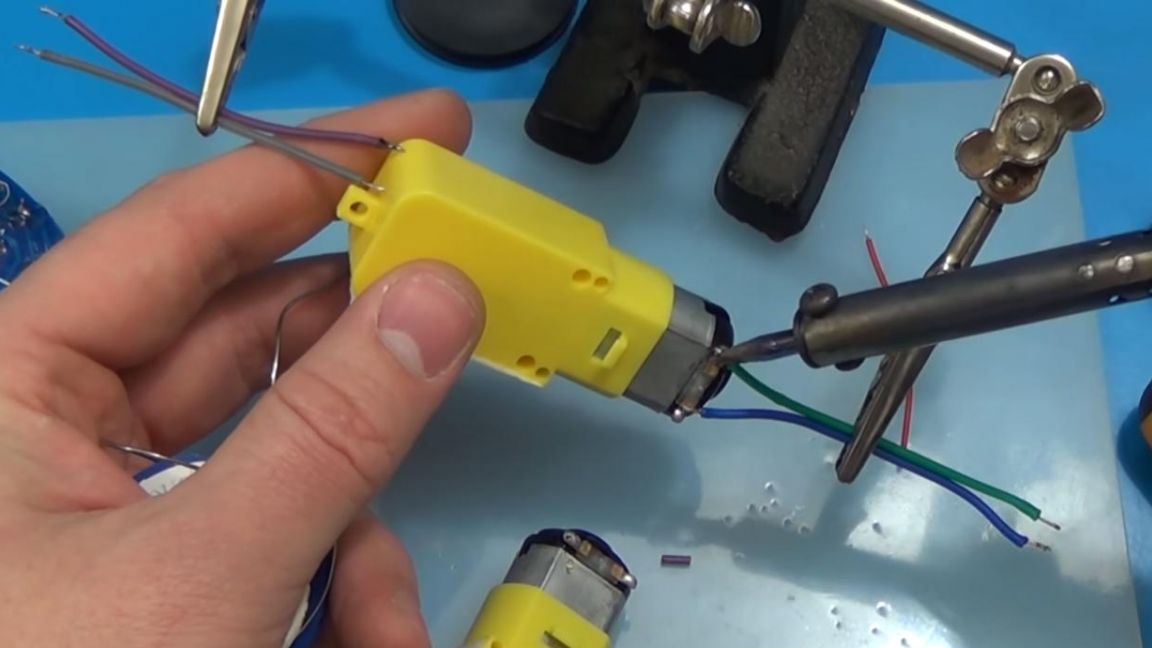
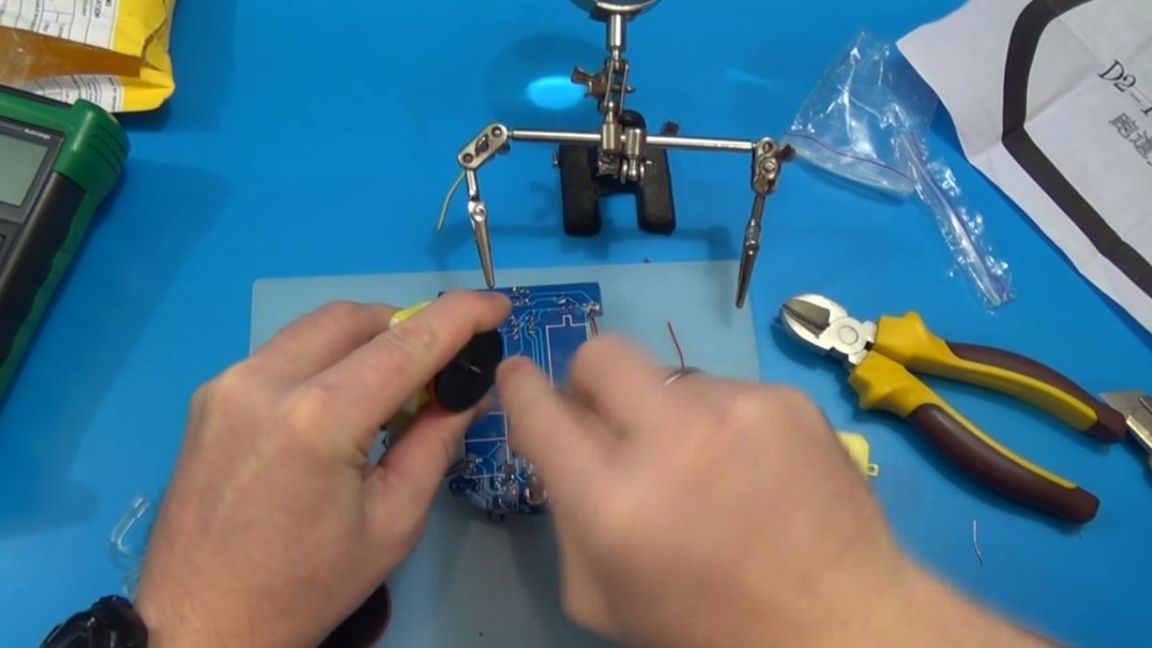
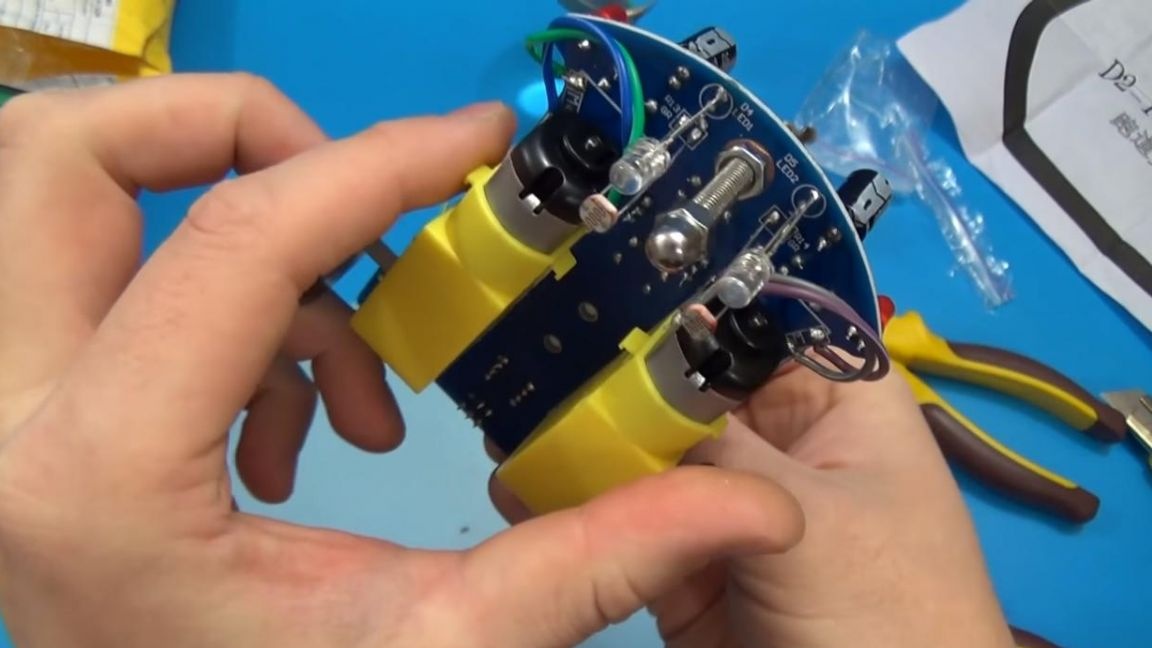
Następnie bierzemy silniki z zębatkami, ich styki muszą być cynowane i dwa przewody lutowane do nich, przyklejamy również obudowę do instalacji baterii AAA i lutujemy żółty przewód na minus i czerwony przewód na plus, ponieważ jest on podpisany na płycie.
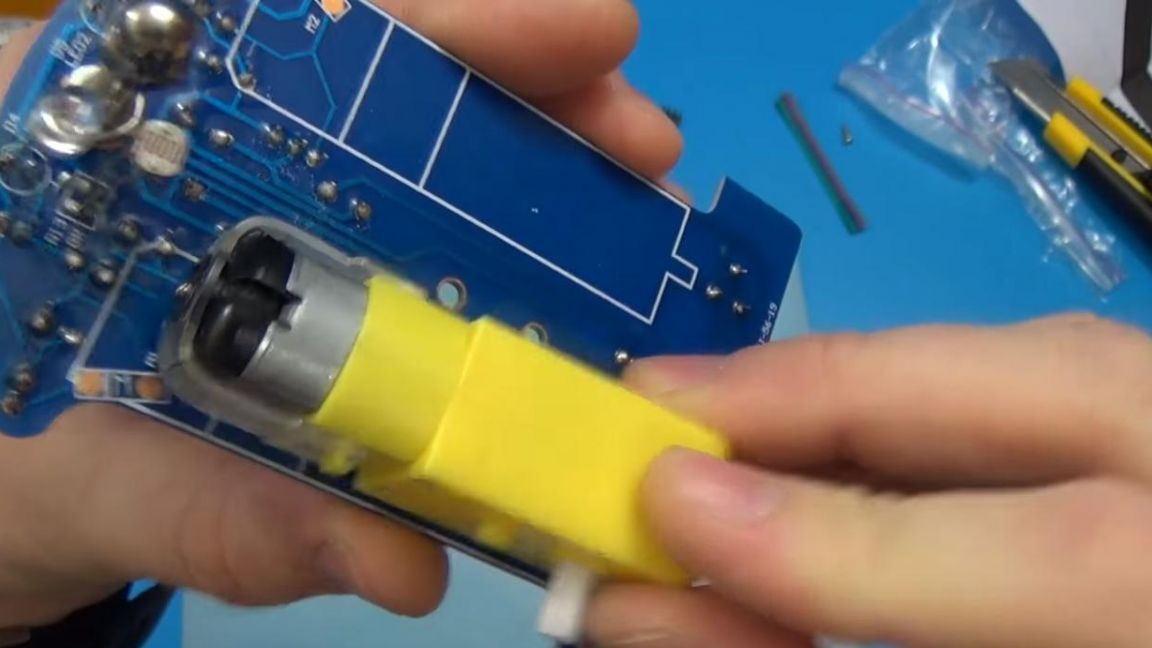

Przed podłączeniem silników należy przymocować do nich koła, które są przymocowane za pomocą jednej śruby, a gumowa podkładka jest nakładana na samo koło, aby zapewnić lepszą przyczepność.

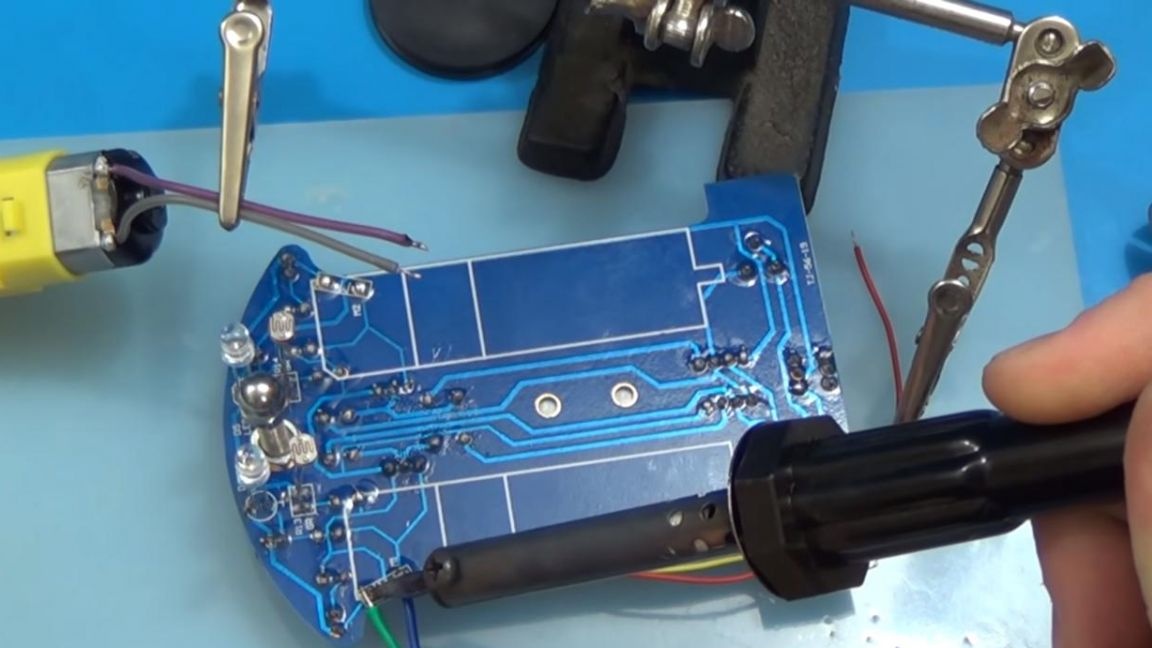
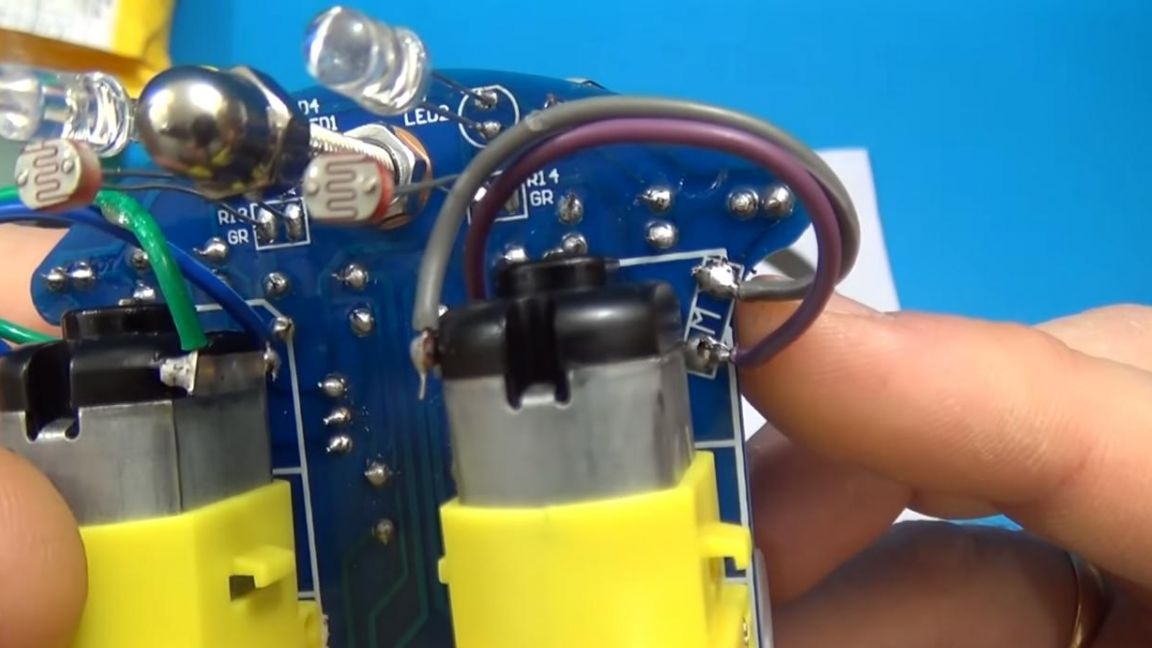
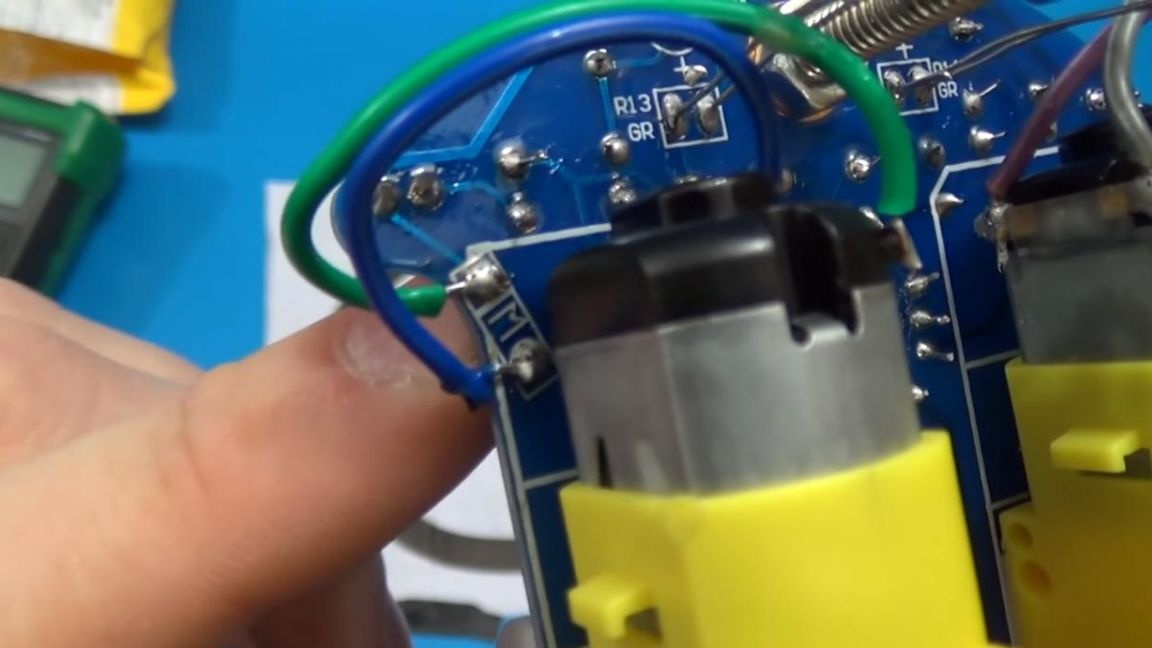
Lutujemy przewody z silników na płytkę, niestety gdzie jest plus, a gdzie minus nie jest tutaj wskazany, ale metodą prób i błędów stwierdzono, że górny kontakt silnika musi być podłączony do góry na płycie za pomocą drutu i lutownicy, odpowiednio z dolnym, robimy to samo .
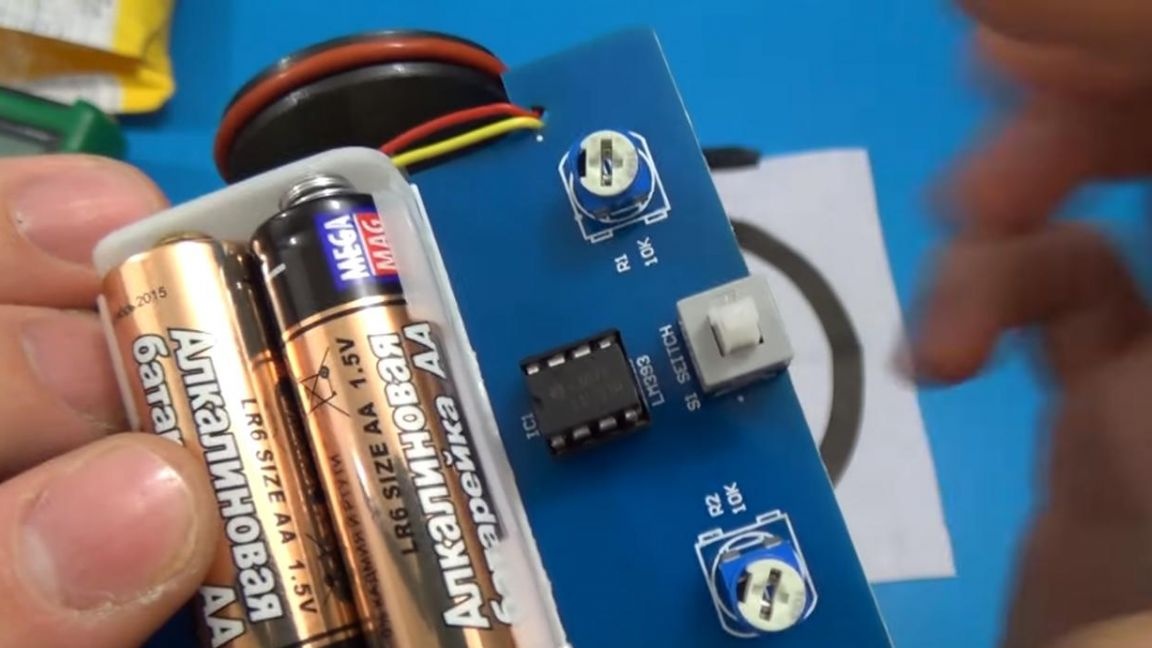
Cóż, pod koniec montażu pozostaje zainstalować mikroukład na płycie w odpowiednim miejscu, połączyć klucz z płytą i włożyć baterie, przestrzegając biegunowości.

Siódmy krok.
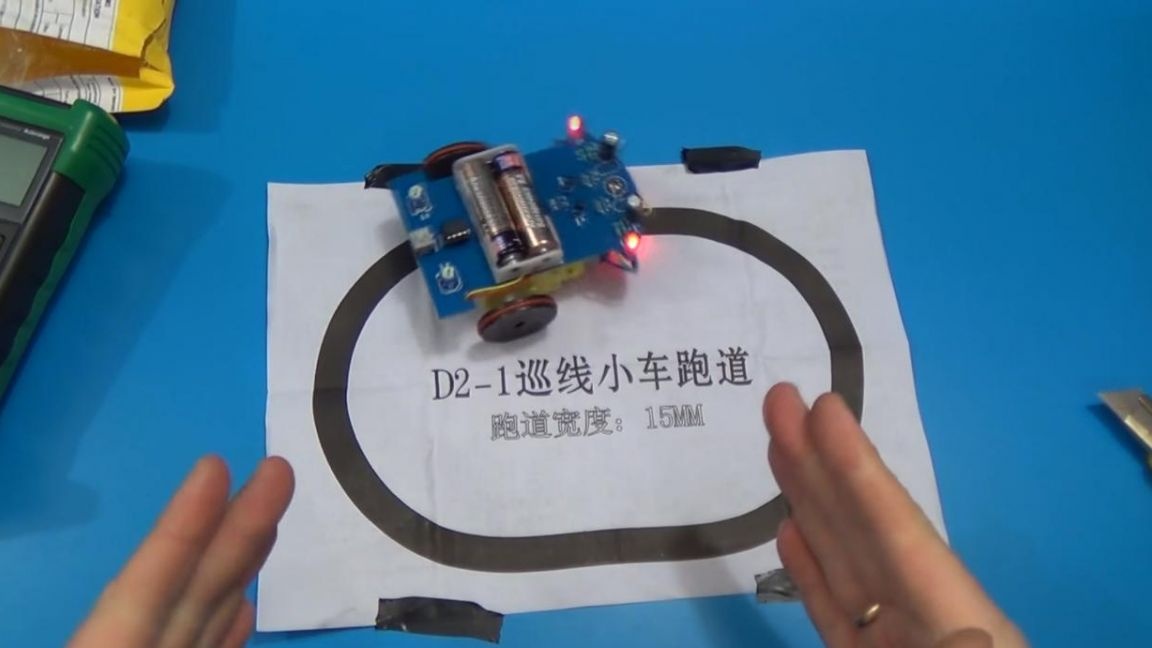
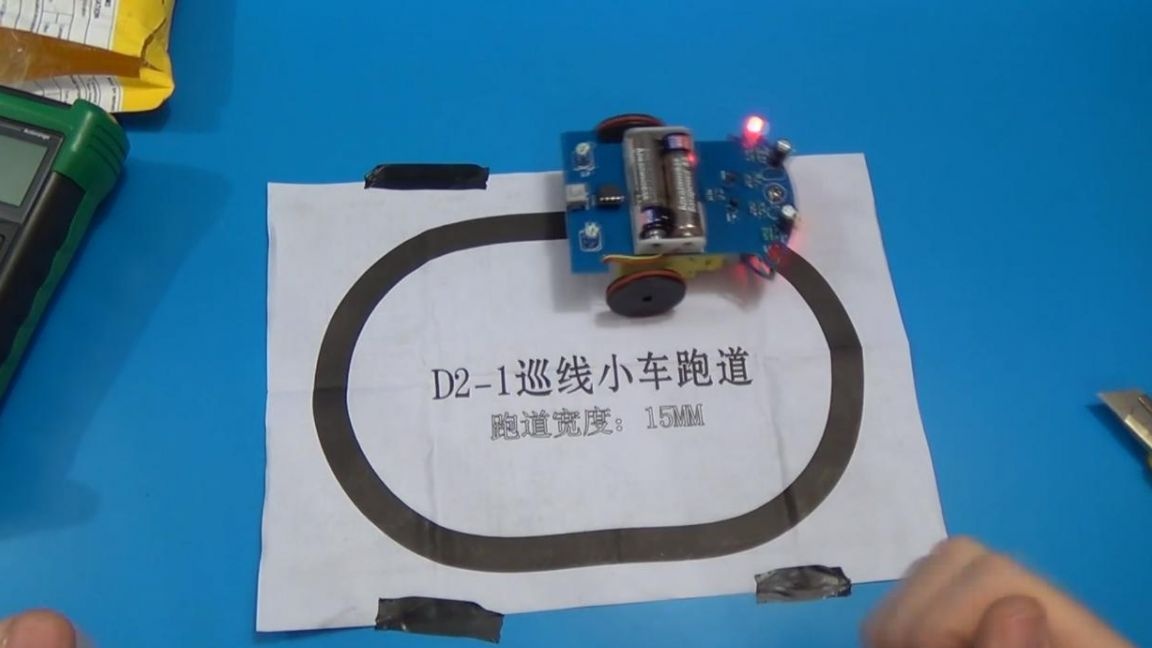
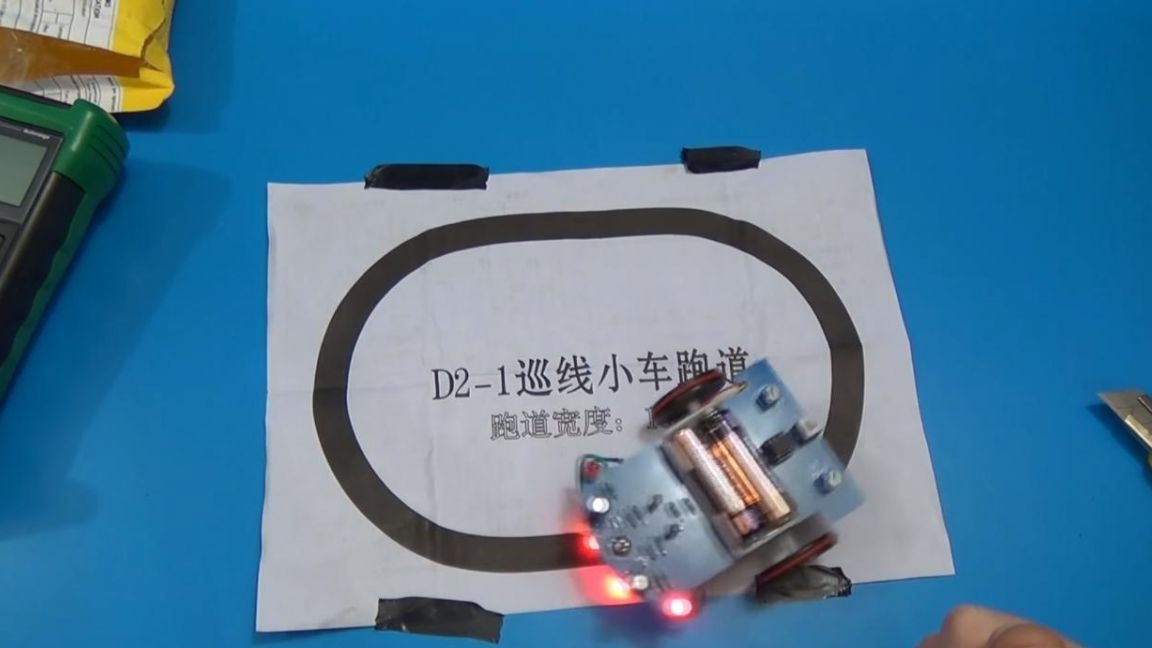
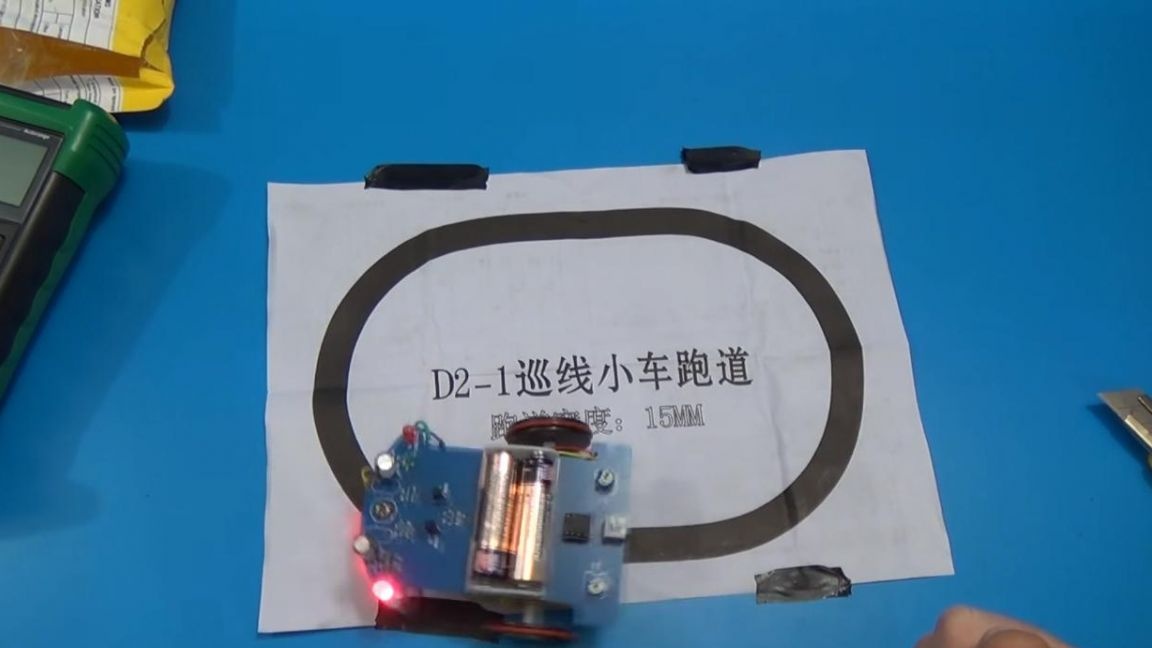
Nadszedł więc czas na przetestowanie tego robota, zestaw zawierał instrukcje, na odwrocie których narysowano owal linią o szerokości 15 mm, co jest wartością optymalną.
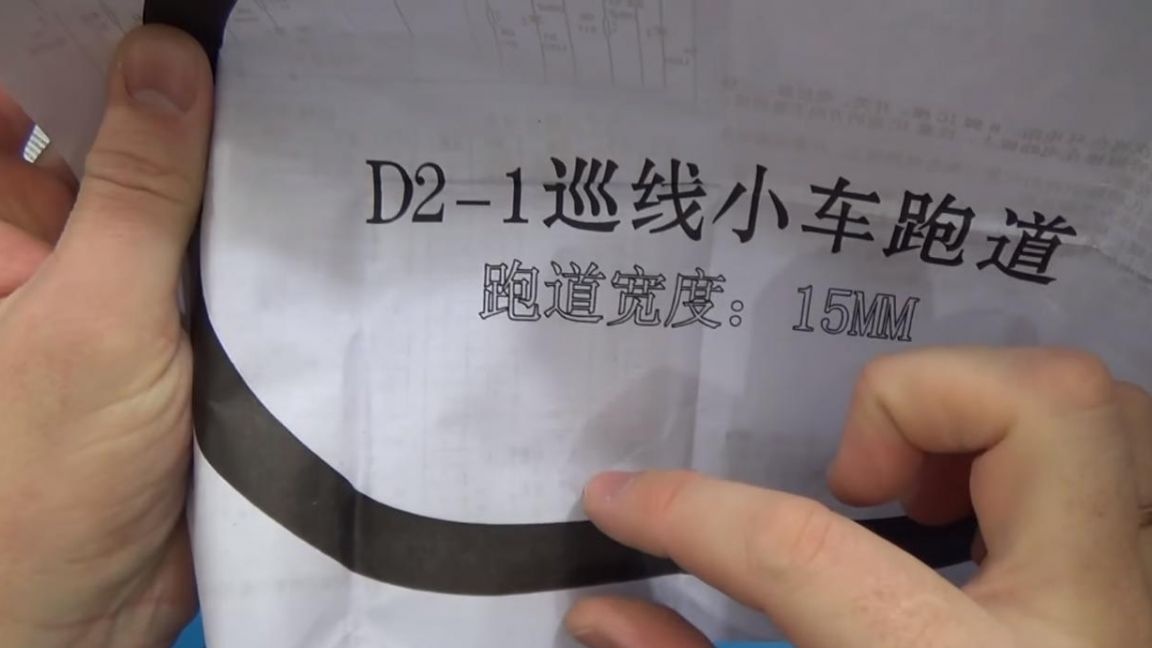
Naciśnij przycisk zasilania i robot Poszedłem, dla jego prawidłowego działania linie nie powinny być ostre, to znaczy, że nie będzie w stanie wykonywać ostrych zakrętów. Na przykład można wykonać ścieżkę o gładkich zakrętach, nakładając taśmę o szerokości 15 mm na równomierną powłokę.
To wszystko dla mnie, dziękuję wszystkim za uwagę i twórczy sukces.