

Coraz częściej technologia Smart Home wkracza w nasze życie. Za pomocą tej technologii można sterować różnymi urządzeniami gospodarstwa domowego, od oświetlenia po czajnik, od zamka po podzielony system lub telewizor. Wygoda, możliwość wielu ustawień, planowania i sterowania ze smartfona itp. To zaleta Smart Home. Korzystając z tej technologii, możesz na przykład zaplanować zaplanowane karmienie ryb w akwarium, psach lub kotach. Główny karmnik postanowił zbudować karmnik dla kotów. Zasada działania podajnika jest prosta. Dwie puszki z otworami. W normalnej pozycji otwory nie są idealne. Napęd serwo jest zamocowany w dolnym rzędzie. Wałek serwa jest zamocowany w górnym rzędzie. W ustalonym czasie do serwonapędu dostarczana jest energia. Wał obraca się i obraca górną puszkę. Otwory są wyrównane, a część paszy wpada do miski. Następnie bank staje w pierwotnej pozycji.
Narzędzia i materiały:
-2 metalowe puszki o różnych średnicach;
-Plastikowy słoik;
-Marker;
- Serwomotor MG996;
-Miska z dwoma przegrodami;
- Polyfoam;
-Arduino;
Grawer;
-Ruletka;
-Nóż biurowy;
-Izolenta (czerwony);
- folia samoprzylepna;
- nożyczki;
- śrubokręt;
-Wiązanie na kabel;
-Wire;
-Szczypce;
-Wire;
Termokurczliwy;
- zapalniczka;
Krok pierwszy: Przygotowanie puszek
Znaczniki na bankach. Wycina otwory zgodnie z układem (patrz zdjęcie). W środku wykonuje otwory na wałek serwa.










Krok drugi: udekoruj puszki
Zawija puszki na opakowanie. Ozdabia biurokracją.




Krok trzeci: Zainstaluj serwomechanizm
Robi otwory w górnym rzędzie i zabezpiecza nakrętkę wału serwo. W dolnym rzędzie zamontowano serwonapęd. Łączy dwa banki.











Krok czwarty: Przeniesienie skrzynki
Wytnij okienko dozujące w dolnym słoju. Okno powinno znajdować się dokładnie pod otworem dolnej puszki. Z plastikowej puszki wycina tacę. Zabezpiecza tacę.


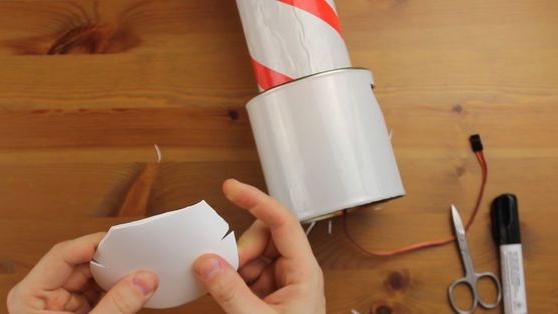

Krok piąty: Miska
Dostosowuje piankę do kształtu jednej części miski. Mocuje plastikową osłonę z dolnej puszki do pianki. Instaluje piankę w sekcji. Kładzie puszkę na pokrywce.






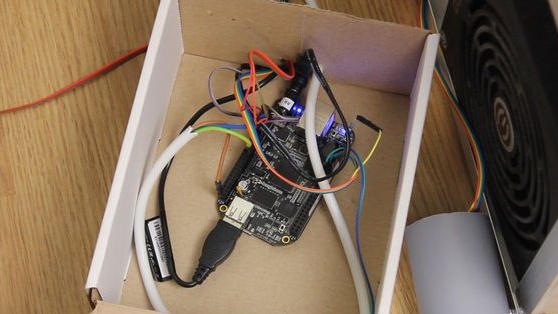
Krok szósty: Arduino
Wierci otwór w dolnej części puszki. Wysyła przewody z serwomechanizmu.Łączy się z płytą Arduino. Brązowy przewód do GND, pomarańczowy do styku 9 lub 10 PWM. Izoluje przewody termokurczliwe. Możesz zobaczyć schemat połączeń
.
Link do kodu.



Pozostaje wypełnić paszę i przetestować działanie podajnika.


Jak widać, autor ma dwa podajniki. Drugi podajnik jest uruchamiany przez naciśnięcie przycisku. Na ostatnim zdjęciu widać, jak kot naciska przycisk. Cały proces produkcji i obsługi podajnika można zobaczyć na filmie.