
Chcę zbudować coś w rodzaju lekkiego ATV lub podobnego opartego na silniku motoroweru.
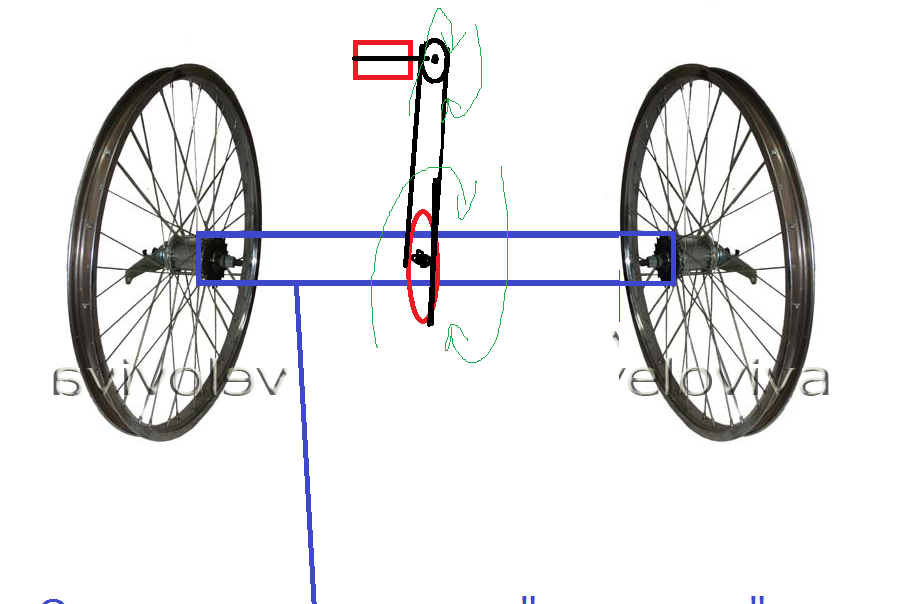
Zastanawiam się, jak zrobić analog różniczki. Co się stanie, jeśli weźmiesz dwa tylne koła roweru i przyspiesz oś do „kół zębatych”.
Teoretycznie, podczas jazdy w osi prostej, oś zostanie zablokowana sama w sobie, i to jest fajne, ponieważ będzie dobra zdolność przełajowa, tylko jedno koło nie będzie się obracać w przypadku zacięcia.
Podczas skręcania (powiedzmy w lewo) prawe koło „rozłączy się” z osią, ponieważ wykonuje większą liczbę obrotów, a lewe koło przenosi moment obrotowy z silnika. ALE! Okazuje się, że jest odwrotnie, moment obrotowy dla lepszego skrętu, którego potrzebujemy na prawym kole.
Chociaż w tym przypadku nie będzie „blokady mostu”, a ATV powinien skręcić normalnie?
Chociaż, jeśli wyobrażasz sobie sytuację, w której się zatrzymaliśmy, przekręciłem kierownicę i ruszyliśmy, aż do momentu ruchu dwa koła natychmiast zaczynają działać, a podczas jazdy jedno z nich jest odłączone. Ogólnie, jak moim zdaniem, pomysł jest co najmniej wyjątkowy))