

W artykule rozważymy przykład montażu najprostszego prędkościomierza strzałkowego do roweru. Płyta będzie tutaj używana jako kontroler Arduino Nano, a jeśli chodzi o strzałę, będzie napędzany małym serwomotorem. Dane prędkości są odczytywane z koła za pomocą kontaktronu, przełącznika zbliżeniowego. Jednak w podobny sposób możesz zrobić prędkościomierz dla każdego innego transportu. Domowe, według autora, jest to bardzo proste i wymaga minimalnej ilości materiałów.

Materiały i narzędzia do domowej roboty:
- mikrokontroler Arduino Nano;
- siłownik;
- kontaktron;
- plastikowe zaciski;
- Magnes stały (autor użyty z dysku twardego komputera);
- czerwona dioda LED;
- jeden rezystor na 1 om;
- jeden opornik 22 omów;
- plastikowe pudełko do stworzenia skrzynki;
- przewody;
- lutownica;
- materiały do stworzenia mechanicznej części prędkościomierza, trybików, nożyczek, gorącego kleju i tak dalej.






Proces produkcyjny jazda na rowerze prędkościomierz:
Pierwszy krok Elektroniczny program domowy
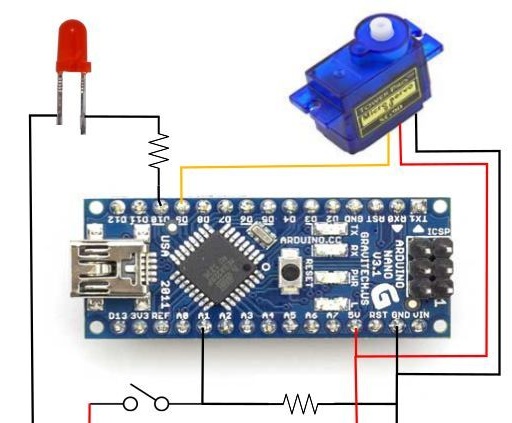
Obwód elektroniczny urządzenia jest bardzo prosty i intuicyjny. Wszystko, co musisz zrobić, to połączyć wszystkie elementy, jak pokazano na rysunku. Obwód ma rezystor 220 omów, służy do podłączenia diody LED. Jeśli chodzi o rezystor 10 kΩ, przełącznik jest przez niego podłączony.
Serwo tutaj obróci strzałkę prędkościomierza, a gdy osiągnięta zostanie pewna (zgodnie z maksymalną prędkością autora), na prędkościomierzu zaświeci się czerwone światło.
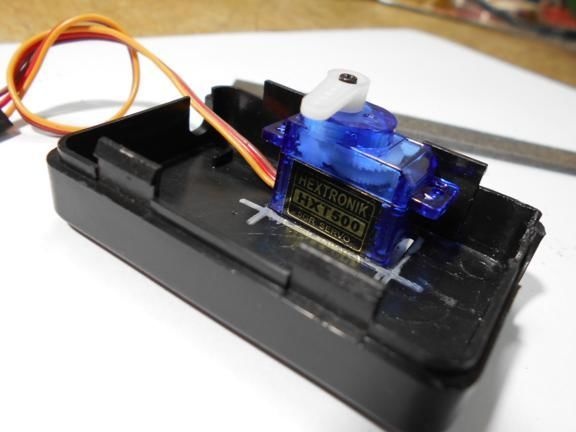
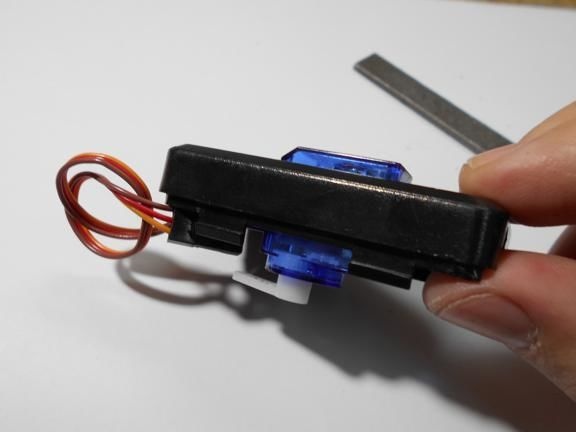
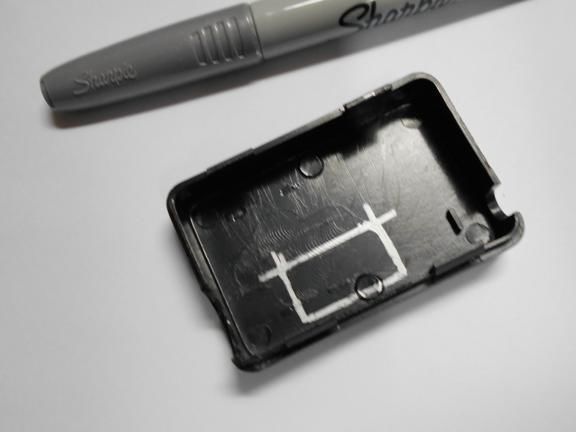
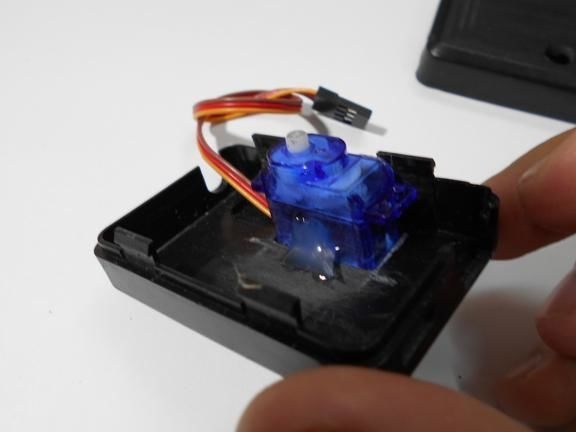
Krok drugi Instalujemy elementy w obudowie
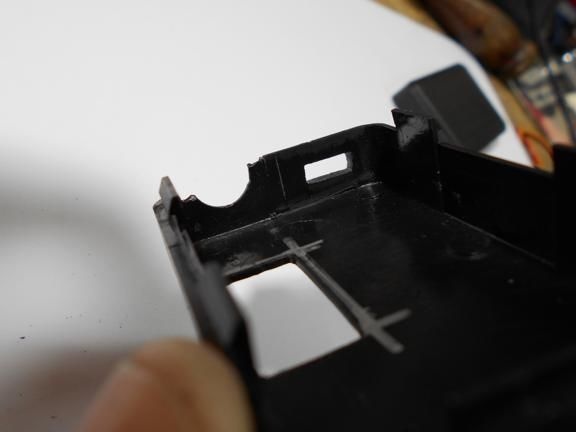
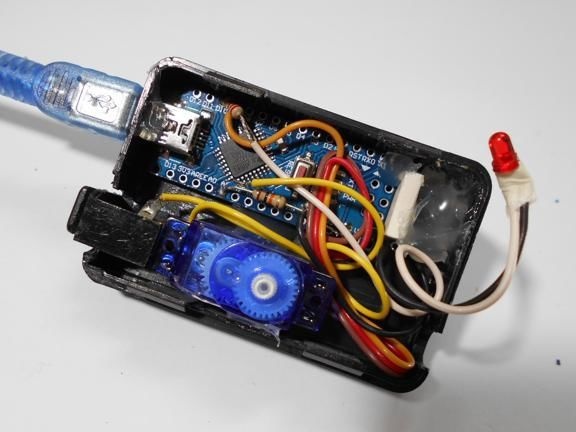
Wszystkie elementy są umieszczone w jednej obudowie; tutaj zainstalowany jest zarówno siłownik, jak i sterownik. Możesz wybrać dowolny przypadek, najważniejsze jest to, że wszystko w nim pasuje. Następnie musisz wywiercić dwa otwory z zewnątrz. Wałek silnika serwo wyjdzie przez jeden, a czerwona dioda LED zostanie zainstalowana w drugim, sygnalizując maksymalną prędkość. Z drugiej strony nie zapomnij zrobić dziur w celu usunięcia kabla USB, a także drutu z kontaktronu.Kiedy wszystko jest zrobione, wszystkie elementy wewnątrz muszą zostać przymocowane za pomocą gorącego kleju, szczególnie w przypadku serwomotoru. Obudowa jest również montowana za pomocą gorącego kleju, musi być starannie uszczelniona przed wnikaniem wody.










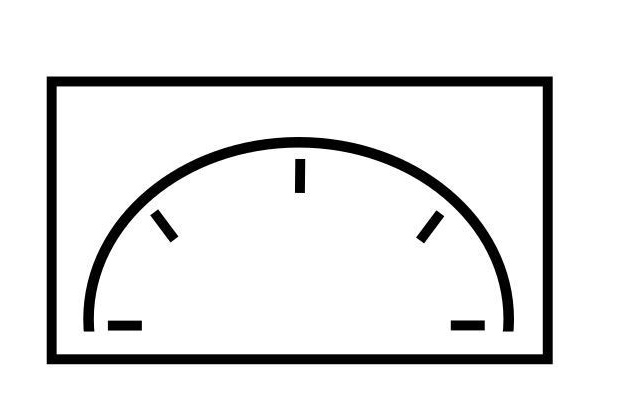
Krok trzeci Wykonywanie wybierania
Tarcza może być wykonana z kartonu lub plastiku. Autor nie narysował na nim liczb, ale po prostu narysował. W kontrolerze możesz ustawić dowolne wartości dla każdego z tych myślników. Na przykład, jeśli strzałka jest na pierwszym, może to oznaczać prędkość 5 km / h, na drugim 10 km / h i tak dalej. Tarcza przylega do plastikowej skrzynki. Jeśli chodzi o strzałkę, jest on zamontowany na wale serwomotoru. Strzała może być wykonana zarówno z kartonu, jak i plastiku lub cyny.

Krok czwarty Kontaktron i magnes
Kontaktron musi być zamontowany na widelcu lub ramie, tak aby znajdował się w minimalnej odległości od magnesu. Jeśli chodzi o magnes, do tych celów autor wykorzystał silny magnes neodymowy z dysku twardego komputera. Jak widać na zdjęciu, zarówno kontaktron, jak i magnes są przymocowane za pomocą plastikowych zacisków, magnes jest przymocowany do szprych. Zasilacz jest instalowany osobno i podłączony za pomocą kabla USB.
Po zainstalowaniu wszystkich elementów można kontynuować z oprogramowaniem układowym, a następnie sprawdzić urządzenie.

Krok piąty Konfiguracja oprogramowania układowego i urządzenia
Aby urządzenie zaczęło działać, musisz wprowadzić do niego oprogramowanie wewnętrzne, odbywa się to za pomocą komputera i specjalnego oprogramowania. Sama procedura nie jest skomplikowana i każdy może sobie z tym poradzić. Po flashowaniu program musi zostać poprawnie skonfigurowany. Na przykład wszystkie rowery mają różne średnice kół i od tego zależy prędkość roweru wyświetlana na prędkościomierzu.
Pierwszy znak autora oznacza prędkość 8 km / h, drugi 19 km / h, a trzeci 24 km / h. Maksymalna prędkość wynosi 36 km / h. Po osiągnięciu tej wartości zaświeci się czerwona dioda LED na prędkościomierzu. Ale każdy może sam skonfigurować urządzenie dla dowolnej prędkości.
To wszystko, urządzenie jest gotowe. Teraz możesz jeździć i cieszyć się pracą interesującej strzałki, ale jednocześnie najdokładniejszego elektronicznego prędkościomierza opartego na Arduino.