
W tym artykule omówimy, jak to zrobić zrób to sam Możesz zrobić tak interesujące urządzenie jak Levitron. W rzeczywistości lewitron to wirujący szczyt lub inny obiekt, który szybuje w przestrzeni w wyniku działania pola magnetycznego. Lewitrony są różnorodne. W klasycznym modelu zastosowano system magnesów trwałych i bączka. Podczas obrotu unosi się nad magnesami, ponieważ pod spodem tworzy się poduszka magnetyczna.
Autor postanowił nieco ulepszyć system, budując na nim lewitron Arduino za pomocą elektromagnesów. Korzystając z tych metod, szczyt nie musi się obracać, aby wzbić się w powietrze.
Takie urządzenie może być wykorzystywane do różnych innych domowej roboty. Na przykład może być doskonałym łożyskiem, ponieważ praktycznie nie ma w nim sił tarcia. Ponadto na takim domowym produkcie możesz przeprowadzać różne eksperymenty, dobrze lub grać z przyjaciółmi.
Materiały i narzędzia do produkcji:
- mikrokontroler Arduino UNO;
- liniowy czujnik Halla (model UGN3503UA);
- stare transformatory (do cewek uzwojenia);
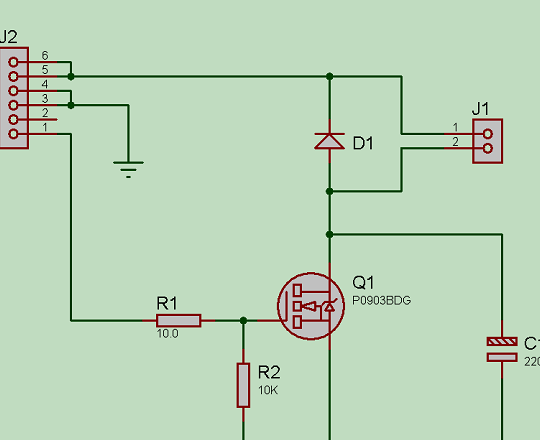
- tranzystor polowy, rezystory, kondensatory i inne elementy (dane znamionowe i marki pokazano na schemacie);
- przewody;
- lutownica z lutem;
- zasilacz 12V;
- korek;
- mały magnes neodymowy;
- gorący klej;
- Podstawa do nawijania cewek i materiałów do tworzenia domowego ciała.
Proces produkcji lewitronu:
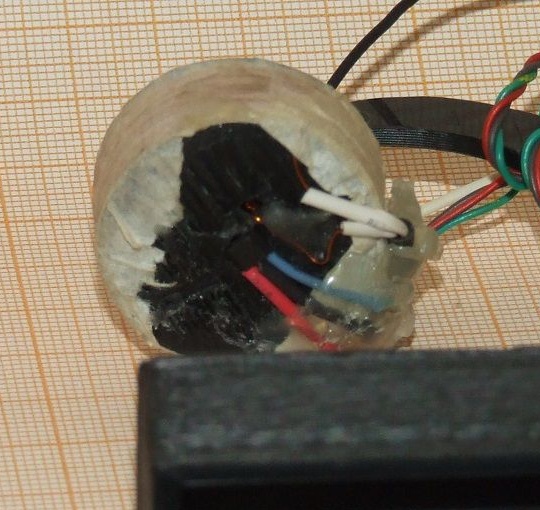
Pierwszy krok Zrób cewkę
Cewka będzie elektromagnesem, wytworzy pole magnetyczne, które przyciągnie górę. Na górze znajdzie się korek, do którego przymocowany jest magnes neodymowy. Zamiast korka możesz użyć innych materiałów, ale niezbyt ciężkich.
Jeśli chodzi o liczbę zwojów w cewce, tutaj autor nie wspomniał o takiej figurze, cewka trafiała do oka. W rezultacie jego rezystancja wynosiła około 12 omów, wysokość 10 mm, średnica 30 mm, a grubość stosowanego drutu powinna wynosić 0,3 mm. W cewce nie ma rdzenia, jeśli musisz wykonać cięższy blat, wówczas cewkę można wyposażyć w rdzeń.
Krok drugi Rola czujnika Halla
Aby górna część szybowała w powietrzu, zamiast ściśle przylegać do elektromagnesu, system potrzebuje czujnika, który może zmierzyć odległość do górnej części. Jako taki element stosuje się czujnik Halla. Ten czujnik jest w stanie wykryć pole magnetyczne nie tylko magnesu stałego, ale może również określić odległość do jakichkolwiek metalowych obiektów, ponieważ same czujniki wytwarzają elektryczne pole magnetyczne.
Dzięki temu czujnikowi góra zawsze utrzymuje odpowiednią odległość od elektromagnesu.

Kiedy góra zaczyna się odsuwać od cewki, układ podnosi napięcie. I odwrotnie, gdy szczyt zbliża się do elektromagnesu, układ obniża napięcie w cewce i pole magnetyczne słabnie.
Czujnik ma trzy wyjścia, to jest moc 5 V, a także wyjście analogowe. Ten ostatni jest podłączony do ADC Arduino.
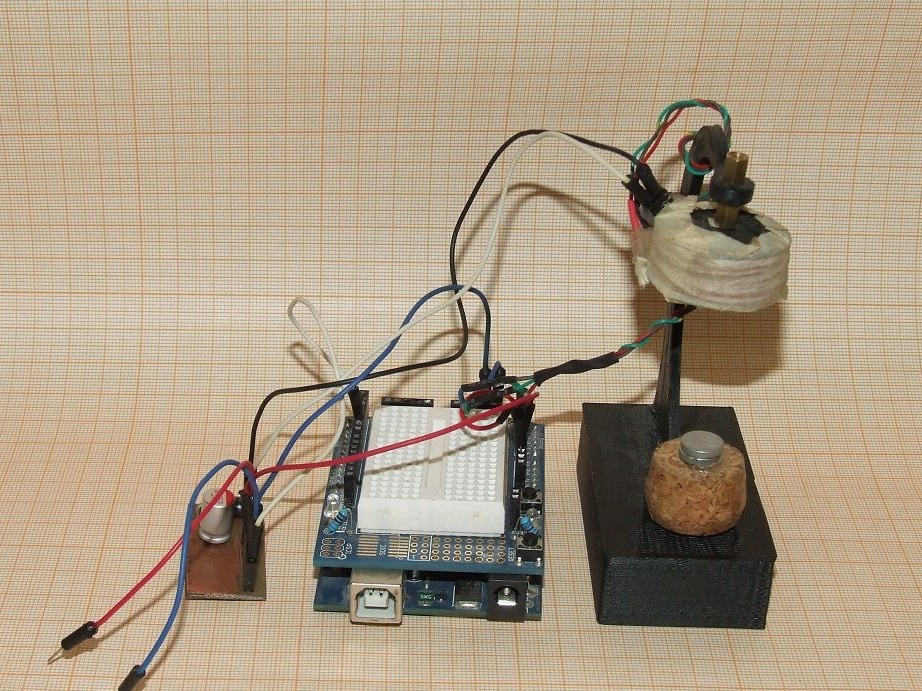
Krok trzeci Montujemy obwód i instalujemy wszystkie elementy
Jako ciało do prac domowych możesz użyć kawałka drewna, do którego musisz zrobić prosty wspornik do zamocowania cewki. Elektroniczny schemat jest dość prosty, wszystko można zrozumieć z obrazka. Elektronika działa ze źródła 12 V, a ponieważ czujnik potrzebuje 5 V, jest on podłączony przez specjalny stabilizator, który jest już wbudowany w kontroler Arduino. Maksymalne urządzenie zużywa około jednego ampera. Kiedy szczyt się unosi, pobór prądu mieści się w przedziale 0,3-0,4 A.
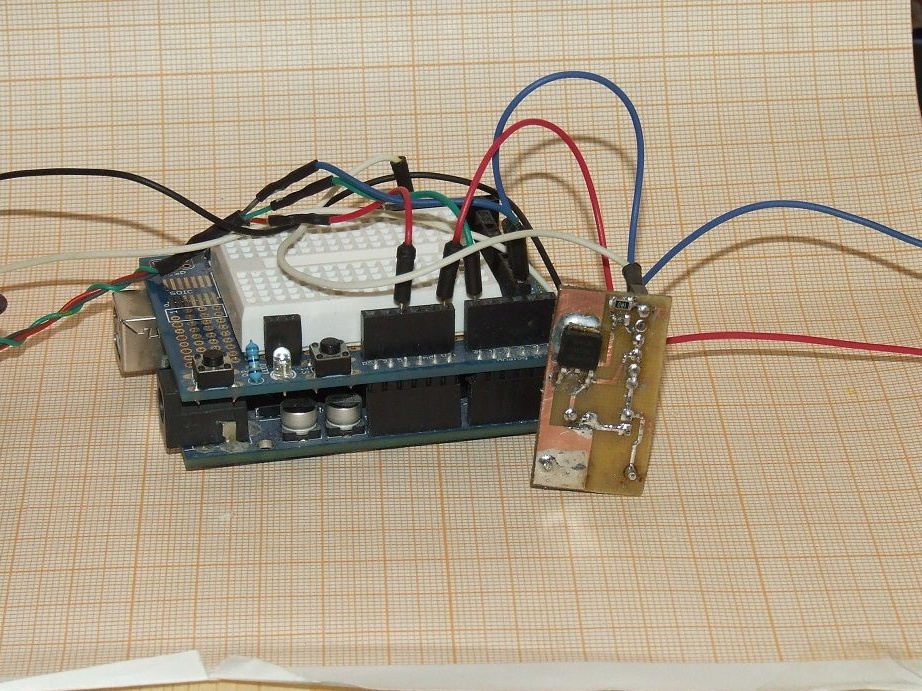
Tranzystor polowy służy do sterowania solenoidem. Sam solenoid jest podłączony do wyjść J1, a pierwszy styk złącza J2 musi być podłączony do PWM Arduino. Schemat nie pokazuje, jak podłączyć czujnik Halla do ADC, ale nie powinno być z tym żadnych problemów.
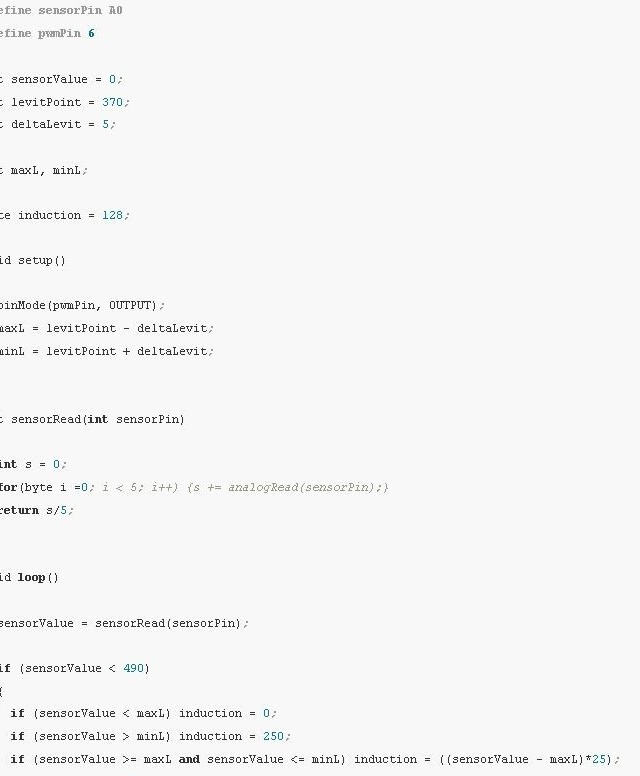
Krok czwarty Oprogramowanie kontrolera
Aby zaprogramować kontroler pod kątem niezbędnych działań, wymagane jest oprogramowanie układowe. Program działa bardzo prosto. Gdy wartości zaczynają spadać poza dopuszczalny zakres, system albo zwiększa prąd do maksimum, albo całkowicie się wyłącza. W późniejszych wersjach oprogramowania stało się możliwe płynne dostosowywanie napięcia na cewce, dzięki czemu gwałtowne wahania góry ustały.
To wszystko, produkt domowy jest gotowy. Przy pierwszym uruchomieniu urządzenie działało, ale wykryto kilka wad. Na przykład podczas pracy przez ponad 1 minutę cewka i tranzystor zaczęły się bardzo nagrzewać. W związku z tym w przyszłości musisz zainstalować grzejnik na tranzystorze lub umieścić mocniejszy. Cewka będzie również musiała zostać przerobiona, ponieważ ma bardziej niezawodną konstrukcję niż tylko cewki z gorącym klejem.
Aby chronić źródło zasilania, do obwodów wejściowych należy podłączyć duże kondensatory. Pierwszy autorski zasilacz 1,5 A przepalił się po 10 sekundach z powodu silnych skoków napięcia.
W przyszłości planowane jest przeniesienie całego systemu do zasilacza 5 V.