

Ten projekt jest idealny dla tych, którzy często zapominają karmić swoje ryby. Lub po prostu nie zawsze jest w stanie zrobić to na czas. Po stworzeniu takiego karmnika nie możesz martwić się o swoje małe zwierzaki, a nawet możesz swobodnie wyjść na chwilę.
Materiały:
- Arduino UNO lub inny zgodny mikrokomputer.
- Zasilacz 9V lub 12V.
- Silnik krokowy 5 V ze starego napędu dyskietek.
- Płynna partycja (używana z zestawu narzędzi).
- Przełącz dźwignię z telefonu stacjonarnego.
- Obudowa z dysku twardego (służy jako pojemnik na paszę).
- Gładka płyta (np. Plastikowa linijka).
- Statyw z kamery CCTV.
- Rezystor 10 kOhm.
- Mechaniczny zegar prądu przemiennego.
Pierwszy krok Montaż obudowy:
Projekt złożenia pokazano na pierwszym rysunku. Z jednej strony obudowy dysku twardego jest wycięty otwór. W przypadku tej części podajnika możesz nawet użyć plastikowej butelki, jednak musisz wymyślić podpórkę, aby była trzymana do góry nogami.
Autor używa statywu z kamery CCTV, ponieważ ma idealną wysokość do zainstalowania pod nim silnika krokowego. Pozostało tylko wywiercić otwór w obudowie.
Do przesunięcia osłony zastosowano silnik krokowy 5 V z mechanizmem napędowym służącym do przesuwania soczewek. Gładką przegrodę z pudełka umieszczono na górze uchwytu soczewki, poniżej otworu, z którego powinny wychodzić granulki paszowe. Aby to zrobić, zaleca się również użycie złamanej linijki. Pozostaw jeden milimetr od dna kadłuba, aby granulki paszowe mogły przejść przez zamkniętą pokrywę.


Krok drugi Modyfikacja ciała:
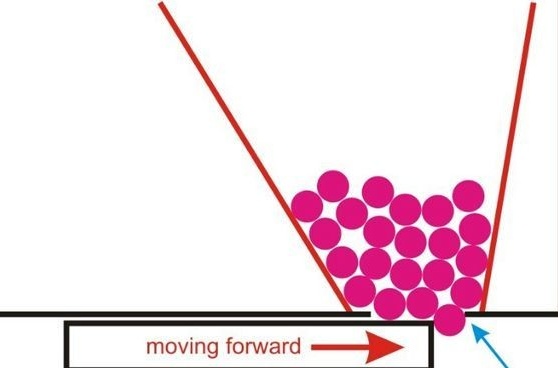
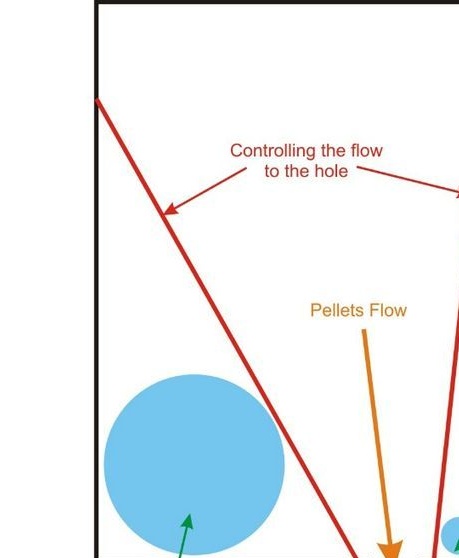
Poniższy schemat pokazuje, jak pasza powinna prawidłowo przejść przez otwór, aby granulki nie pozostawały pod kątami wyjścia paszy.
Po dwóch dniach użytkowania autor zdał sobie sprawę, że część kanału została zablokowana, ale nie wyszła zgodnie z przeznaczeniem. Dlatego potrzebowaliśmy linijki lub dowolnej gładkiej płyty, która pasuje do pojemnika i ma kształt litery V.

Krok trzeci Elektroniczny część podajnika:
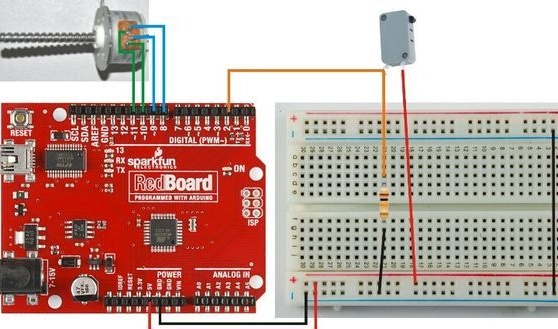
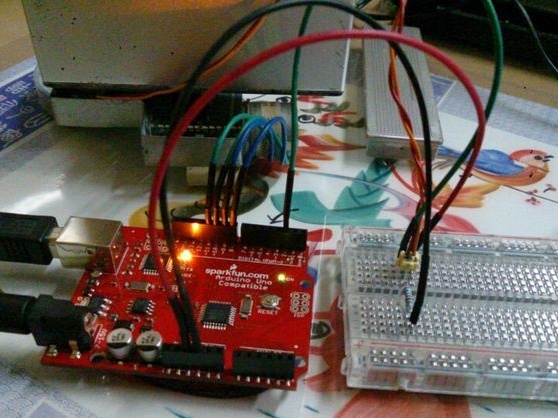
Silnik krokowy, rezystor 10 kΩ i przełącznik są zainstalowane, jak pokazano na poniższym schemacie. Aby ułatwić zrozumienie działania obwodu i testowania, używana jest płyta pilśniowa, której brakuje w końcowym zestawie (przykład na ostatnim zdjęciu).
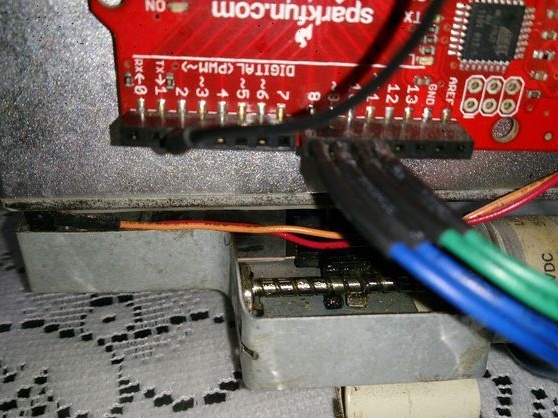
Cztery przewody silnika są podłączone do pinów cyfrowych 8-11. Jedna noga przełącznika do mocy wyjściowej 5 V. Druga noga z kolei jest połączona z ziemią za pomocą rezystora 10 kΩ, a także z cyfrowym stykiem 2.
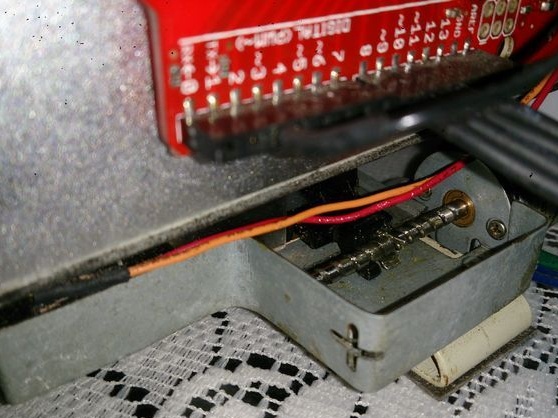
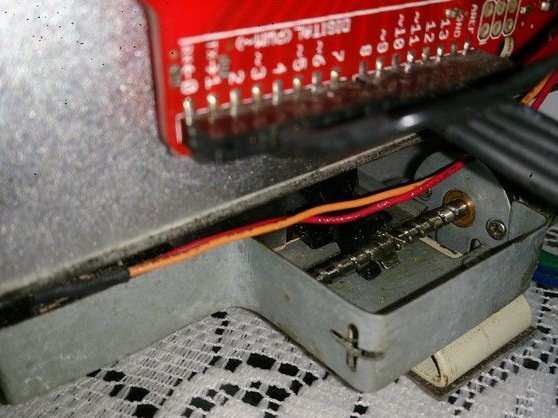
Przełącznik jest umieszczony przed ruchomą pokrywą, a metalowa część jest wygięta, tworząc w ten sposób ogranicznik (czerwony i pomarańczowy drut na trzecim zdjęciu). Gdy przełącznik zostanie przesunięty do przodu i naciśnie przycisk stop, Arduino zarejestruje WYSOKA wartość i zatrzyma silnik.
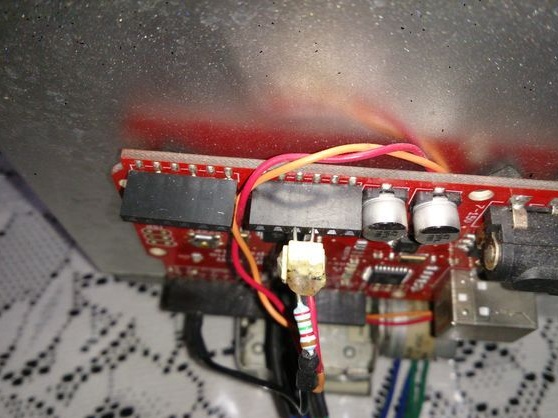
Płytka jest przymocowana z tyłu obudowy za pomocą taśmy elektrycznej, a wtyczka z zegarem na boku. Służą do wyważenia obudowy, aby pozostała we właściwej pozycji.
Test pracy domowej roboty bez pojemnika na żywność:
Poniższy film pokazuje działanie w pełni zmontowanego urządzenia. Jak widać, pierwsze wyjście jest prawidłowe. Przy drugim wyjściu paszy można zauważyć, że jeśli granulki utkną, a pokrywka nie zamknie się prawidłowo, wówczas przesunie się do przodu i do tyłu, aż zamknie się prawidłowo.
Kod programu: