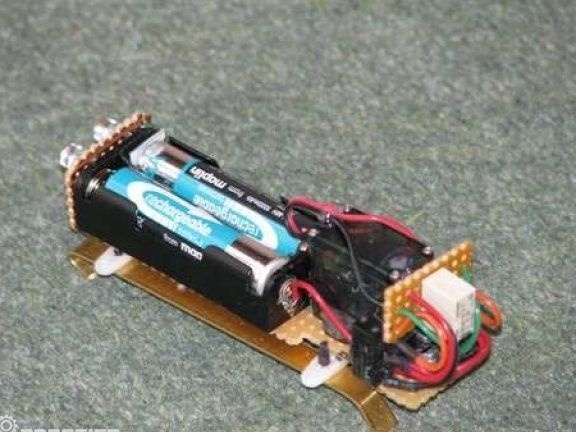
Carpet Crawler to mały robot należący do klasy BEAM. Takich roboty natychmiast obejmują dwa takie elementy, jak estetyka, biologia, elektronika i mechanika. Dzięki takiemu podejściu takie roboty naśladują żywe stworzenia w jak największym stopniu, czasem wydaje się, że potrafią myśleć.
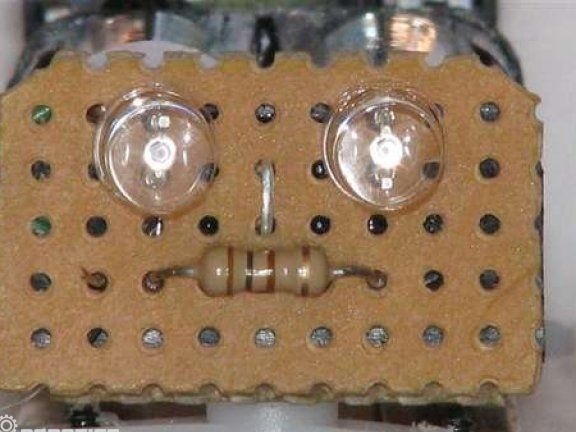
Jako mózg takich robotów stosowane są przekaźniki i czujniki oraz ruchy domowej roboty z powodu siłownika. Baterie AAA są wykorzystywane jako zasilanie. Gdy oczy płoną jasno, zainstalowane są dwie diody LED.
Materiały i narzędzia do produkcji:
- pasek mosiężny o wymiarach 1/32 "x 1/4" x 8 ",
- dwa kawałki miedzianych pasków;
- orzechy i boty M2;
- siłownik (Micro RC (7,5 g));
- dwa mikroprzełączniki (można uzyskać ze starych napędów);
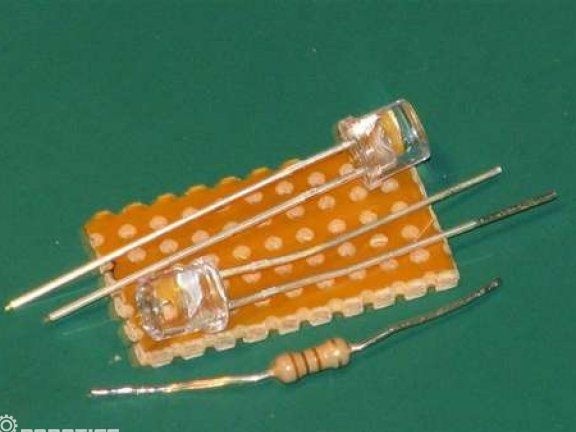
- dwie diody LED (najlepiej użyć czerwonej, ponieważ w tym przypadku biała lub niebieska może działać);
- jeden rezystor 100R (jeśli diody LED są żółte lub zielone, to 47R);
- dwie baterie AAA i uchwyt na nie;
- cienkie okablowanie.




Proces produkcyjny:
Pierwszy krok Zmiana serwomotoru
Serwosilnik jest zaprojektowany w taki sposób, że podczas pracy wykonuje impulsywne ruchy. W takim przypadku należy go przerobić, aby działał na rotacji. Można to zrobić na dwa sposoby.
W pierwszym przypadku można zaoszczędzić prędkość i kierunek od sterowania silnikiem, a także elektroniki sterowania. Urządzenie nadal będzie wymagało impulsów przychodzących do działania.
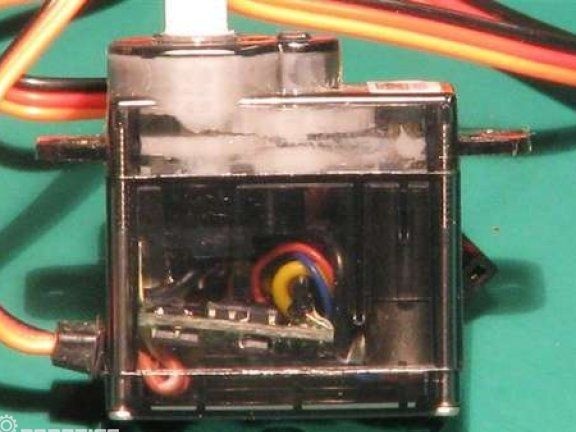
Autor poszedł w drugą stronę. Konieczne jest odcięcie elementu oporowego kół zębatych. Następnie koła zębate należy ustawić w jednej linii, trudno będzie je ponownie złożyć, jeśli sekwencja zostanie utracona. Podczas demontażu powierzchnię siłownika należy nasmarować smarem silikonowym.
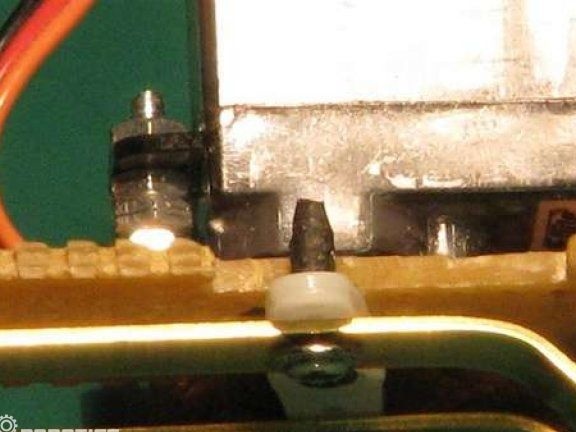
Zdjęcie pokazuje mechanizm kontrolny RSV, który należy przenieść.

Po wyjęciu płytki czerwony przewód należy przełączyć na dokładnie ten czerwony przewód silnika. Przewody należy ostrożnie owinąć taśmą elektryczną, aby uniknąć zwarcia.

Krok drugi Utwórz część mechaniczną
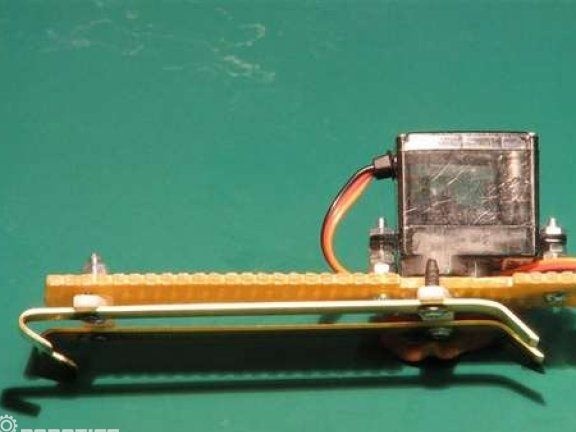
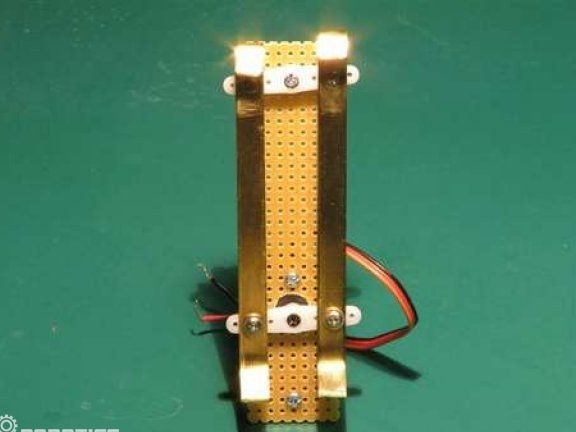
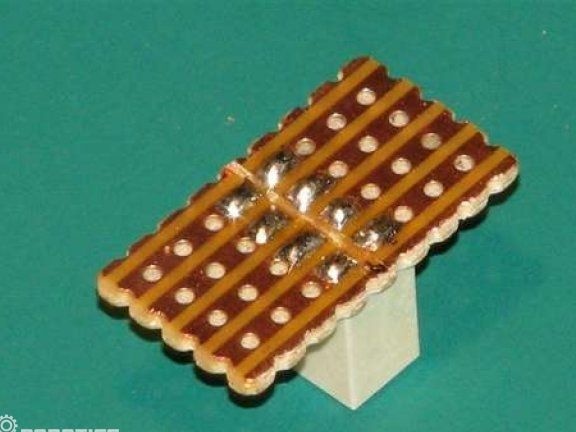
Na płycie roboczej musisz wywiercić kilka otworów, a następnie zainstalować przekaźnik z tyłu baterii.Do montażu serwonapędu stosuje się śruby 2 mm.
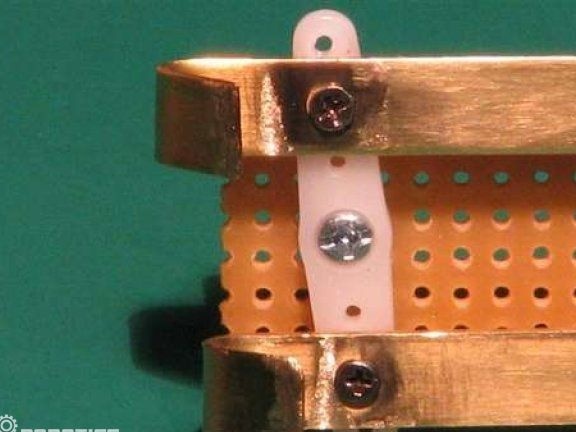
Nogi robota są wykonane z litych miedzianych płyt, w tym celu są najpierw cięte na kawałki o określonej długości i wykonują zgięcia. Dzięki takim odchyleniom robot przylgnie do drogi i czołgnie się. Przymocuj płytkę za pomocą małych śrub.


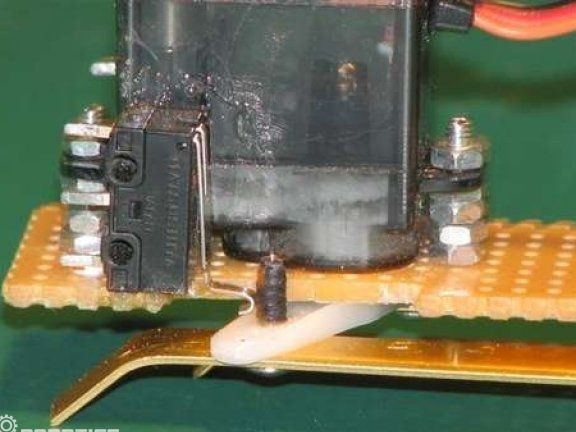
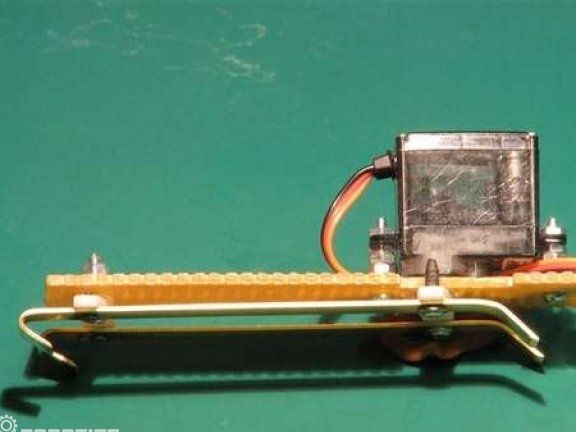
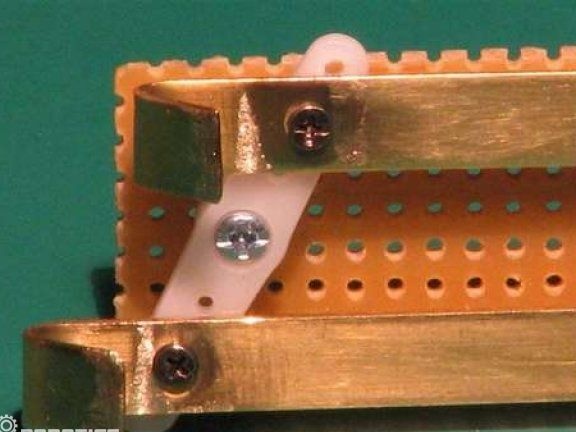
Aby kontrolować nogi, musisz ustawić przełączniki. Są przymocowane do serwomotoru za pomocą kleju.
Krok trzeci Obwód elektroniczny robota
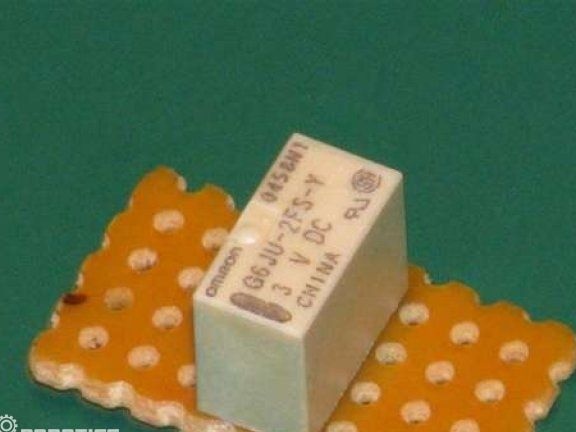
Główny element w pracy domowej roboty można uznać za zatrzask przekaźnikowy, który zadziała po odłączeniu od cewki. Przekaźnik zmieni ruch, ale pozostanie w jednym miejscu do następnej tury.
Impulsy do cewek będą pochodzić z dwóch mikroprzełączników, włączą się, gdy przekaźnik anteny uderzy w przełącznik.

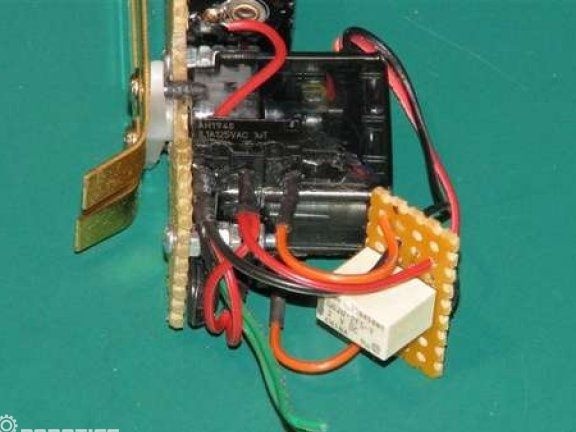
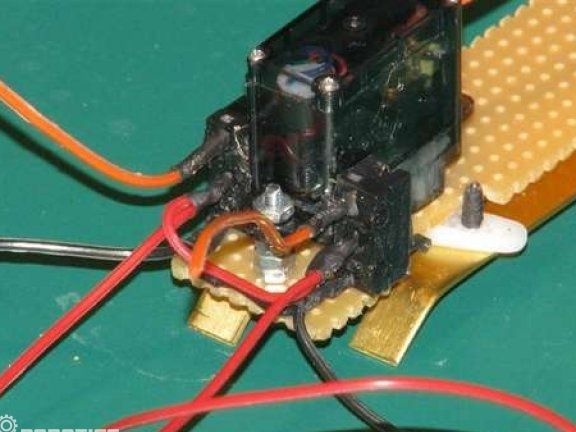
Krok czwarty Montaż części elektronicznej
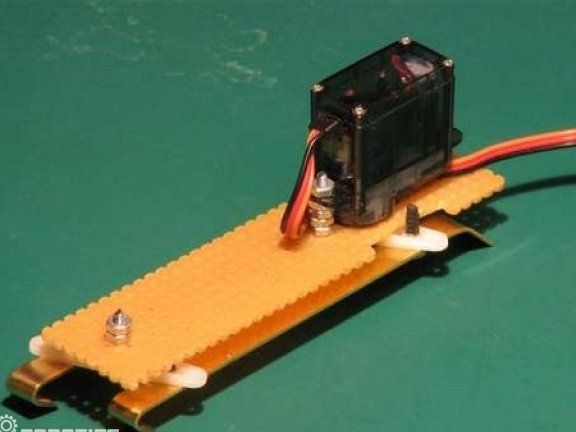
Przekaźnik jest zamontowany na złomie na talerzu, więc najłatwiej jest go podłączyć. Cały proces podłączania elektroniki pokazano na zdjęciu.





To wszystko, teraz robot jest gotowy. Co najlepsze, będzie wyglądał na dywanie, ponieważ jest on zaprojektowany specjalnie dla takich miejsc. Najpierw robot powinien zapalić diody LED, a następnie będzie powoli czołgał się po podłodze.