

Chcesz walczyć między robotami-pająkami? Następnie uważnie przestudiuj ten artykuł, w którym Mistrz powie ci, jak zrobić takiego pająka. A dla przejrzystości jego pracy zobaczmy wideo.
Narzędzia i materiały:
Dla pająka
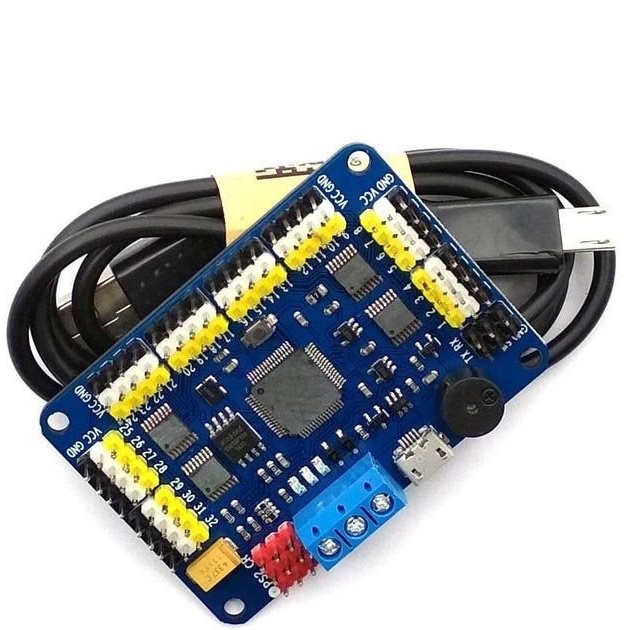
32-kanałowy kontroler serwo;
-Wemos D1 Mini kontroler;
- Serwonapędy MG90S - 18 sztuk;
-Ubec 6A 5 V kontroler;
- konwerter buck DC-DC;
- Swetry;
-Bateria;
Dla wieży
-Dwa silniki;
-Moduł mocy;
- Konwerter obniżający;
Serwo;
Drukarka 3D;
-Klej pistoletu;
-Klej;
- śrubokręt;
- łączniki;
- Taśma dwustronna;
-Szczypce;
-Nóż;
-Nadfiles;
-Plastyczne kulki;
- Akcesoria do lutowania;






Krok pierwszy: drukowanie części
Najpierw musisz wydrukować szczegóły ciała i nóg na drukarce 3D. Możesz pobrać pliki do wydrukowania na tym link.


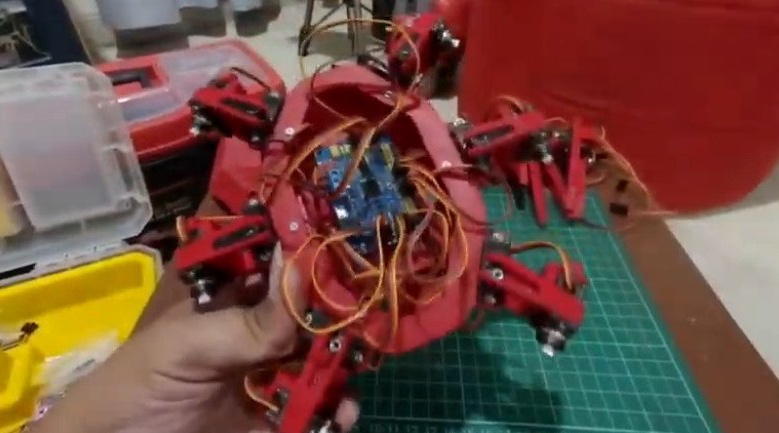
Krok drugi: kompilacja
Teraz musisz zebrać robopauk.
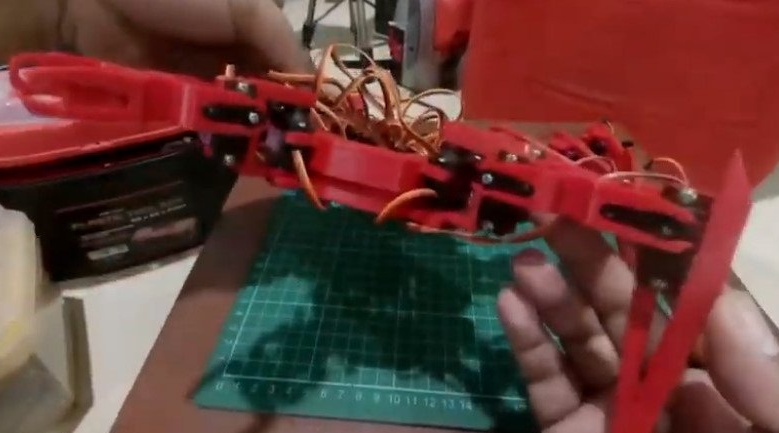
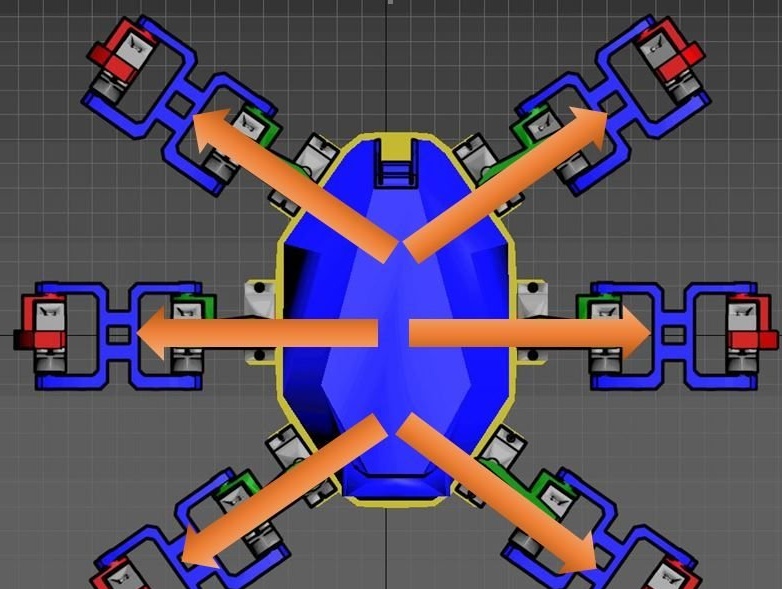
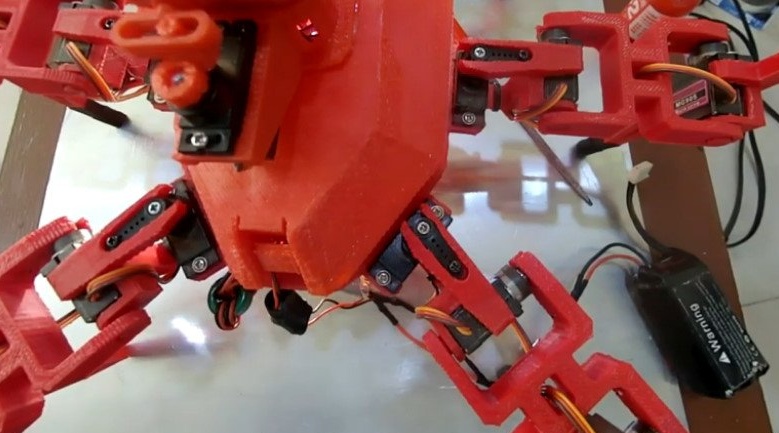
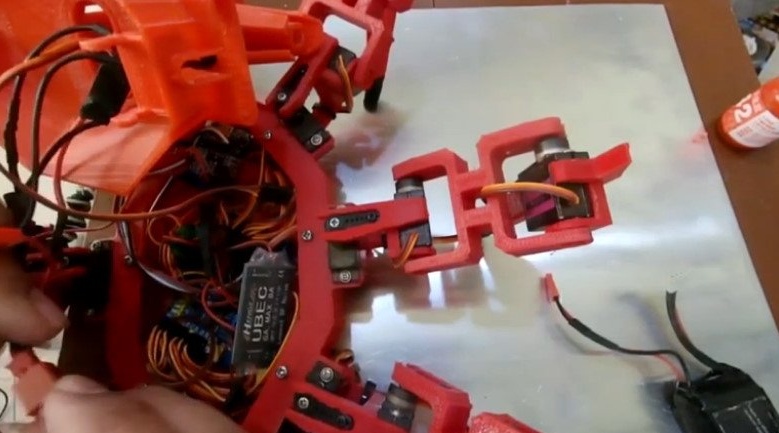
Mistrz instaluje serwa na stawach nóg pająka. W sumie robot ma sześć nóg i trzy serwa na każdej nodze.








Instaluje serwomechanizmy na platformie podwozia.




Mocuje pierwsze stawy nóg do serwomechanizmów platformy.




Przewody są wciągane do otworów technologicznych i podłączane do kontrolera.





Instaluje kody pośredniczące.


Ustanawia drugie stawy nóg. Łączy przewody od serwomechanizmów do kontrolera.






Instaluje trzecie złącze. Dzięki temu połączeniu pająk przylega do powierzchni podczas ruchu.



Łączy i sprawdza działanie każdego serwonapędu.



Jeśli wszystko normalnie naprawia przewody za pomocą opasek, instaluje baterię i zamyka pokrywę.



Proces kompilacji można zobaczyć na filmie.
Krok trzeci: o elektronika
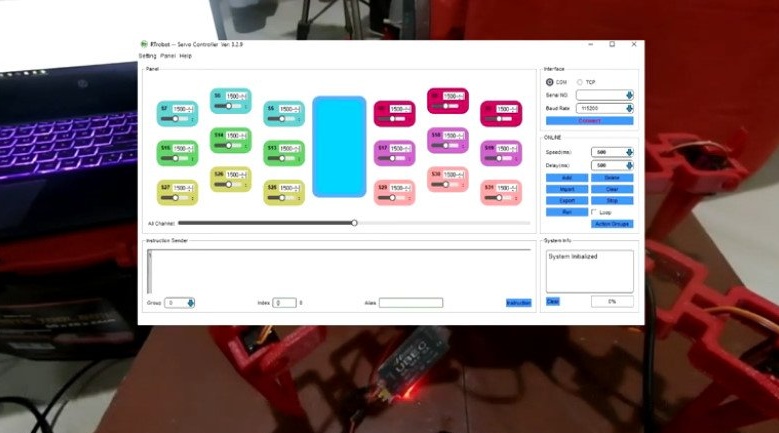
Kreator użył serwosterowania RTrobot do sterowania ruchami. Program do zarządzania można pobrać tutaj lub tutaj.
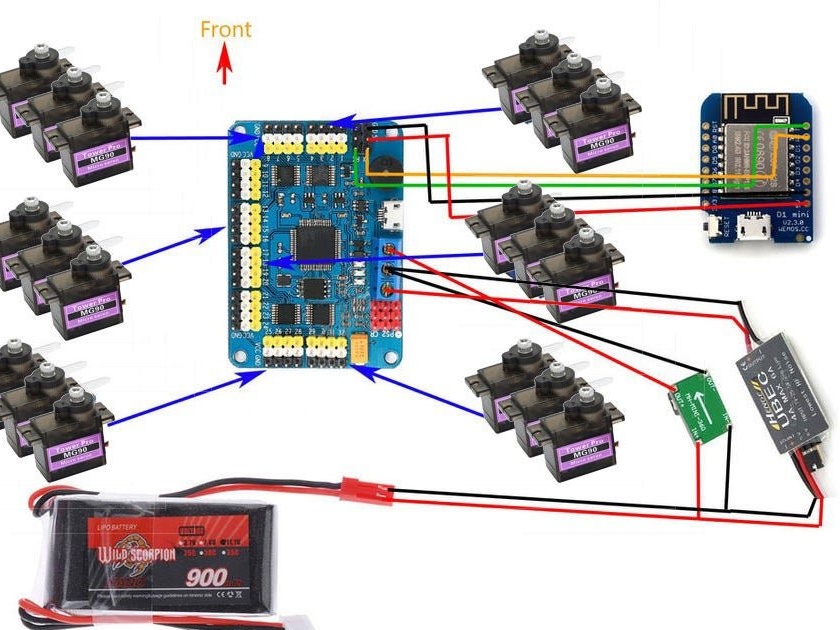
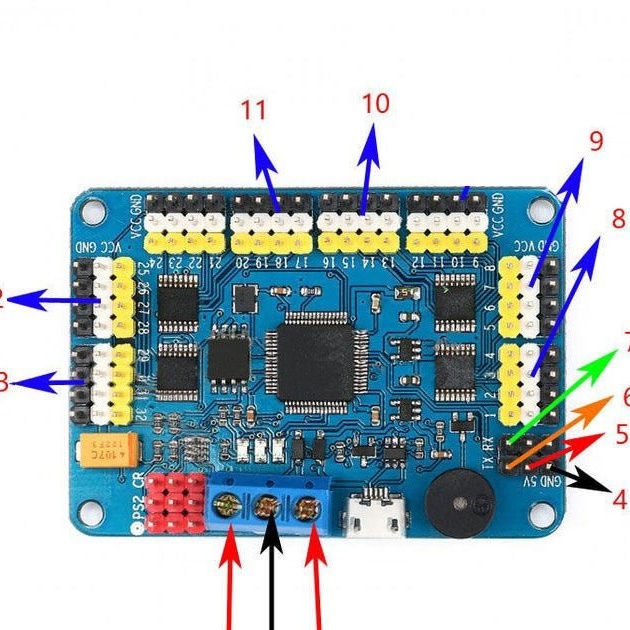
Wszystko jest połączone w następujący sposób:
1. Wyjście 5 V (+) UBEC
2. Uziemienie z UBEC i konwertera buck
3. Zasilanie 5 V (+) z konwertera
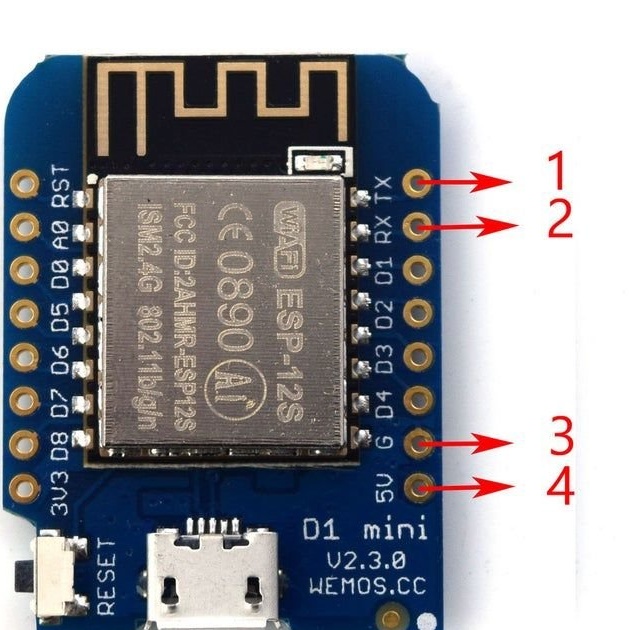
4. na pinie mini G Wemos D1
5. do Wemos 5v
6. do Wemos D1 RX
7. Wemos TX
Serwonapędy są podłączone do pinów od 8 do 13.
Zainstaluj kod na NodeMCU. Możesz go pobrać tutaj.
WeMos D1 mini to minimalna karta Wi-Fi ESP8266.
Używając wemos D1 mini jako punktu dostępowego WIFI, możesz wysłać polecenie szeregowe do serworegulatora. Wszystko, czego potrzeba, to po prostu sflashować płytkę nodeMCU za pomocą kodu, i możesz podłączyć smartfon do AP nodeMCU. Następnie za pomocą przeglądarki internetowej przejdź do strony http://192.168.4.1.
To jest ważne
po włączeniu serwomechanizmu wszystkie serwa zostaną przeniesione do pierwotnej / standardowej pozycji
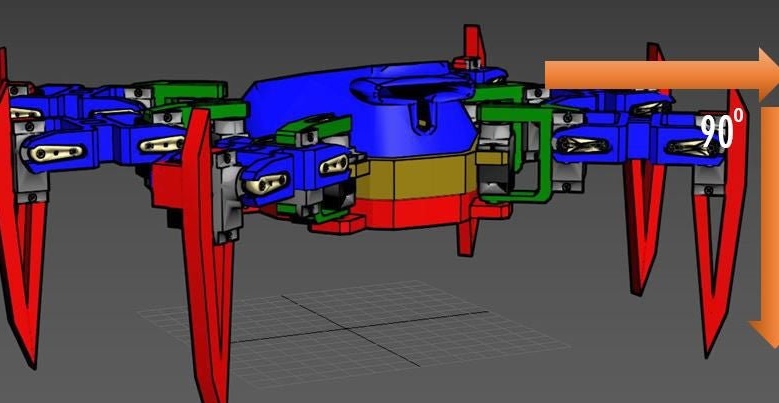
zainstaluj serwa tak dokładnie, jak to możliwe, jak pokazano na powyższym rysunku lub na filmie
wyreguluj położenie stawów, wyłącz i włącz ponownie urządzenie, aby upewnić się, że wszystkie nogi są w prawidłowej pozycji
jeśli stawy przylegają, potrzyj, wyreguluj pozycję.
Krok czwarty: wieża
Teraz przechodzimy do montażu wieży.
Najpierw należy wydrukować szczegóły wieży. Możesz pobrać pliki na ten temat link.
Następnie mistrz przystępuje do montażu wieży. Obwód obracania wieży i łączenia części elektrycznych znajduje się poniżej.
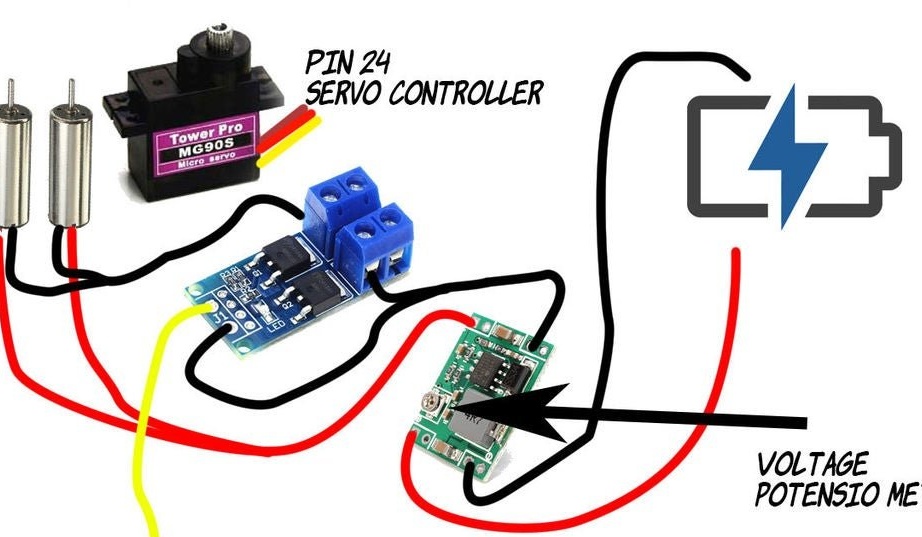
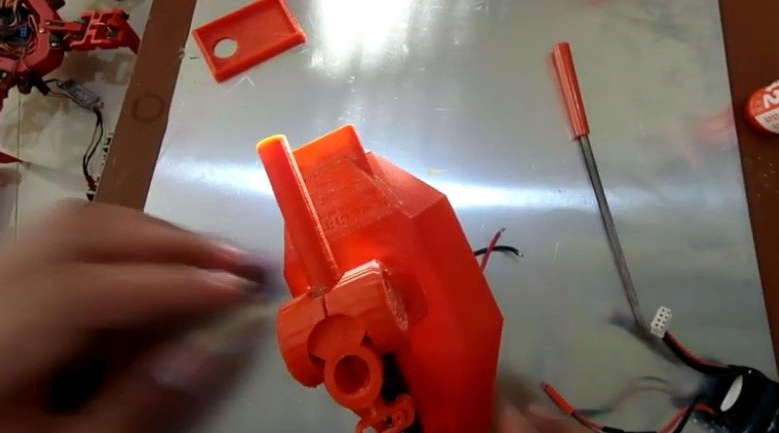
Instaluje serwo na wieży.







Dwustronna taśma przykleja się do rolek.


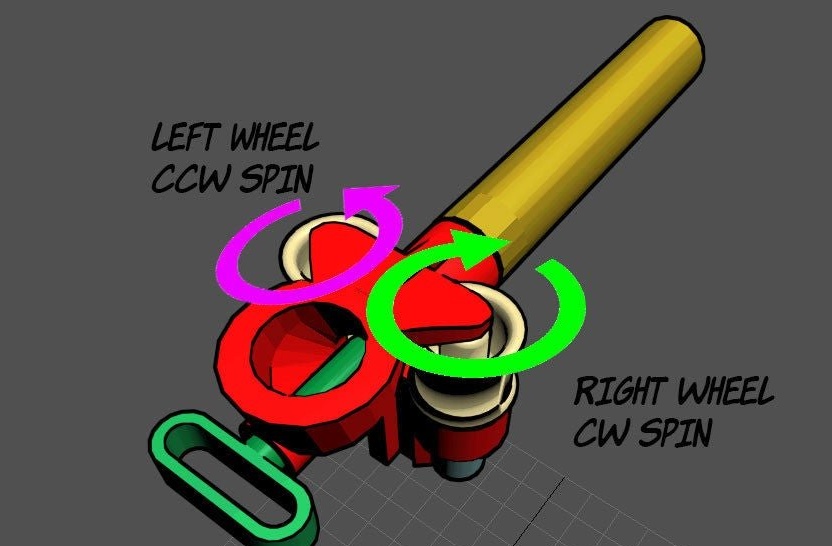
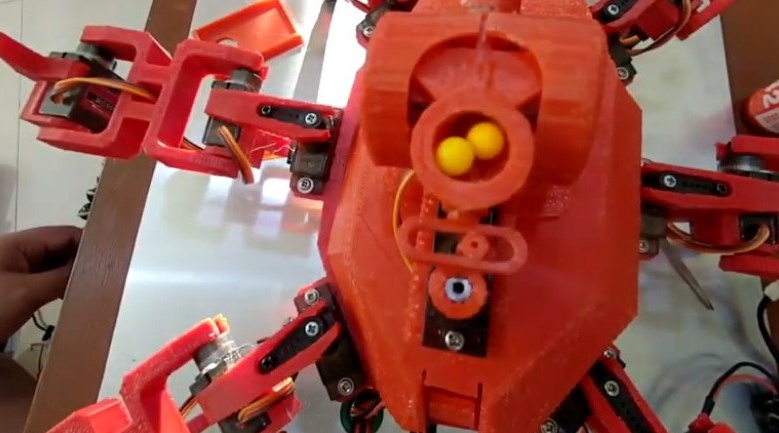
Zbiera broń. Instaluje silniki w uchwycie. Instaluje rolki na wałach silnika.







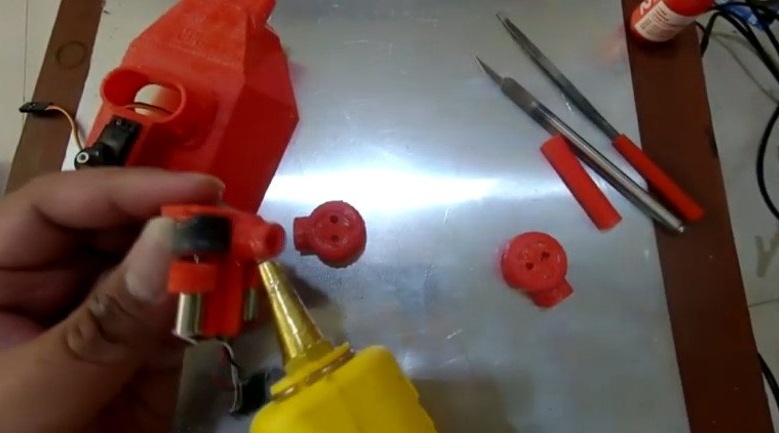

Łączy przewody i zbiera wieżę.




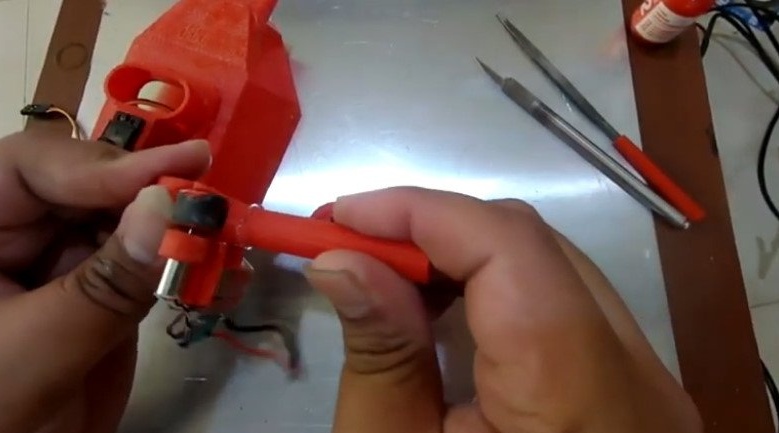
Ładuje pociski i sprawdza działanie pistoletu. Mechanizm można regulować, przesuwając uchwyt na wale serwo.


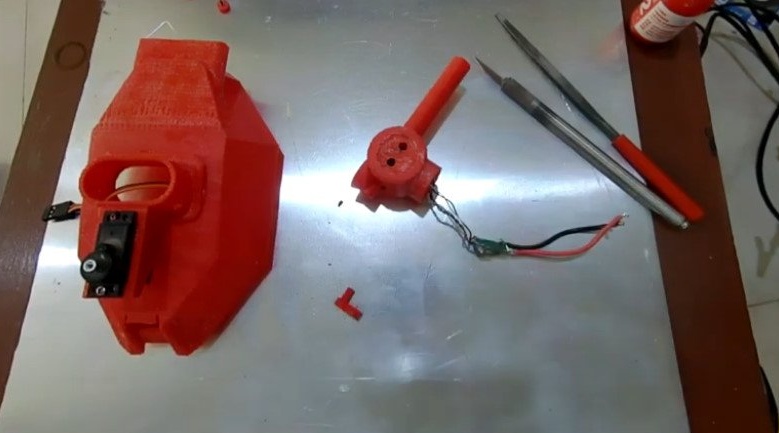
Dokonuje ostatecznego połączenia, montażu i kontroli.




Wideo z montażu wieży można zobaczyć poniżej.
Wszystko jest gotowe. Zbierz jeszcze jednego robopauk, a będziesz mógł organizować walki.
