

Pozdrowienia mieszkańcy naszej strony!
Tym razem AlexGyver, autor kanału YouTube o tej samej nazwie, o wakacjach, które, nawiasem mówiąc, nie bardzo nam się podobają, postanowił powtórzyć Projekt Adafruit - bioniczne oko wkładane do szklanek spawarki gazowej.

Z punktu widzenia kodu ten ukończony projekt nie jest absolutnie interesujący, autor był zainteresowany mechanizmem, a mianowicie jego układem współrzędnych.
Wrócimy do tego, ale trochę później, ale najpierw zbierzmy całą mechanikę i połączmy wszystko elektroniczny komponenty.
Aby powtórzyć ten projekt, potrzebujesz:
1) Okulary spawalnicze. Możesz użyć zarówno metalu, jak i plastiku.

Plastik z pewnością pasuje lepiej, ale oczywiście nie może pochwalić się jakością. W szczególności w tym przypadku, wykonane z plastiku, boki dosłownie spadły natychmiast i autor musiał je przykleić.

Takie okulary można kupić w sklepie sprzedającym narzędzia lub materiały budowlane. Autor kupił je w sklepie All Instruments.
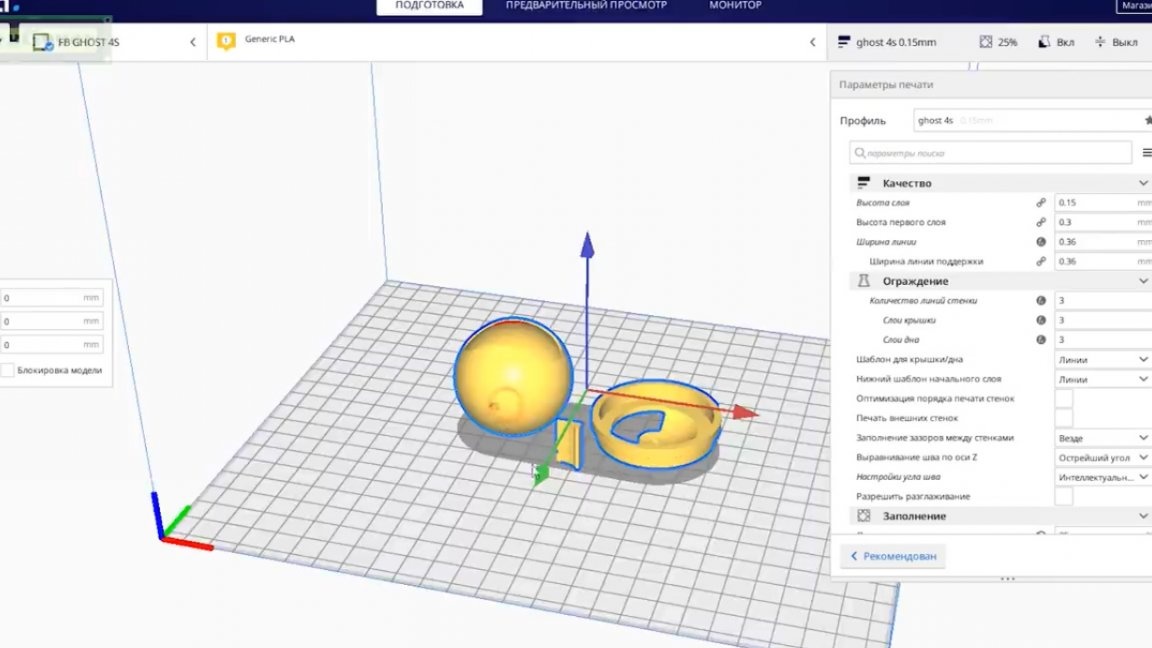
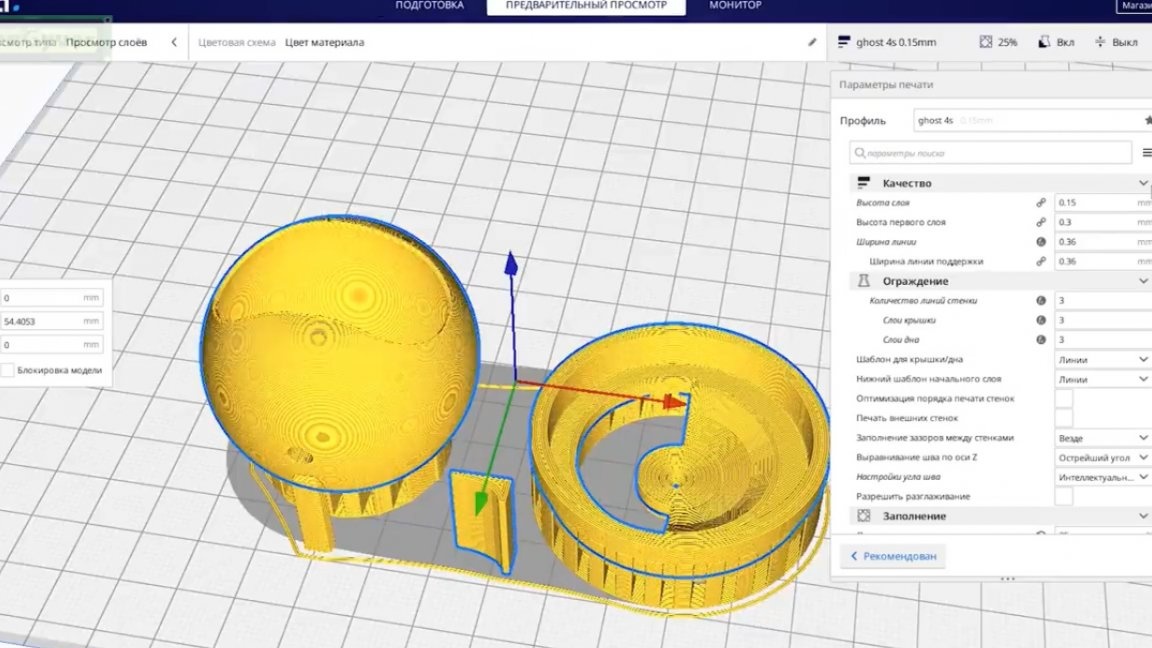
2) Następnie musimy je wydrukować Drukarka 3D części zamienne.
Autor wydrukował elementy z białym plastikiem PLA na nowej 32-bitowej drukarce 3D Flyingbear Ghost 4s. Plik zawiera wszystkie 3 modele jednocześnie. Drukowanie jest konieczne przy użyciu podpór.

3) Kolejnym elementem potrzebnym do naszego specjalnego projektu na Halloween jest platforma Modele Arduino Nano.

4) Wymagane również bateria litowo-jonowa:
5) Wzmacniacz DC-DC (do 5 V);
6) Przełącznik:

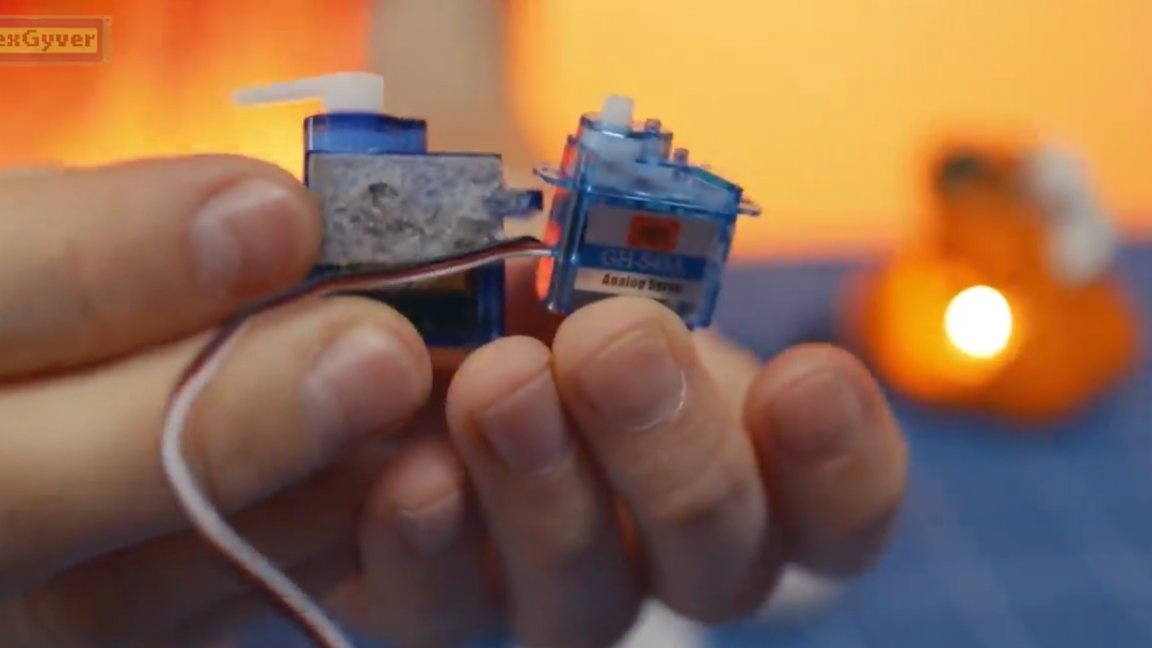
7) Mikro serwa, ale nie standardowe 9 gramów, ale jeszcze mniej:
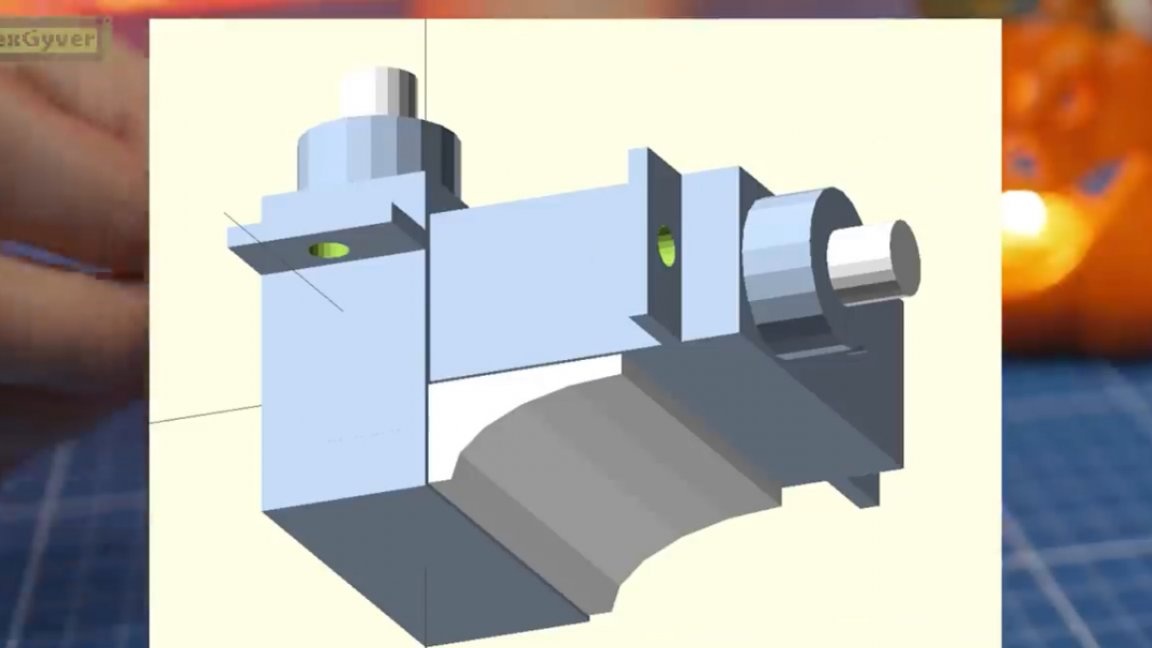
Tak więc, z niezbędnymi komponentami, niejako wymyślonymi, zabierzmy się do montażu urządzenia. Najpierw musimy zamontować dyski w następujący sposób:
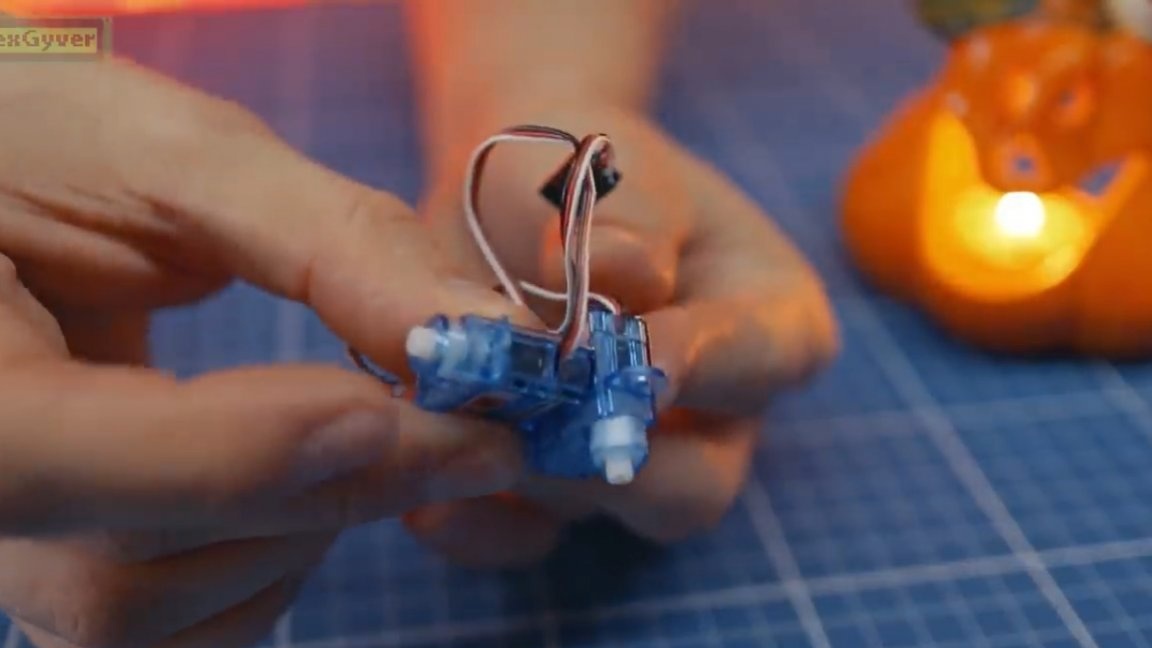
Oto bardziej zrozumiały obraz:
Usuwamy naklejkę i za pomocą super kleju łączymy to wszystko.


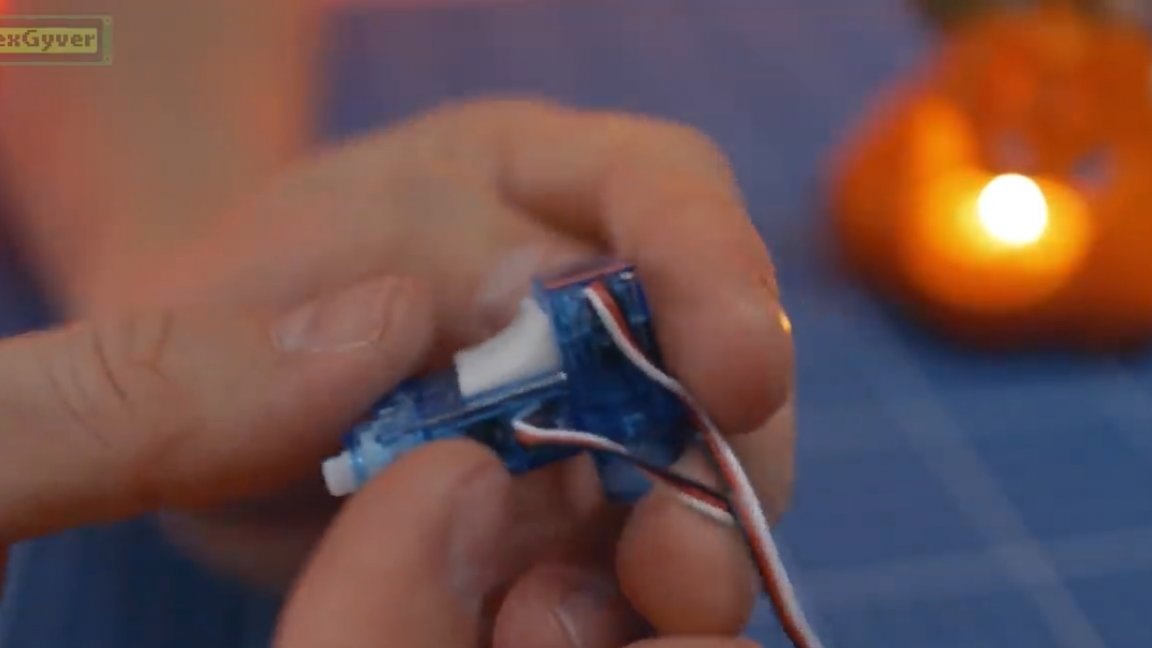
Nawiasem mówiąc, chińskie serwomechanizmy wydają się nieco różnić od Adafruth i trzeba je przykleić w ten sposób, z niewielkim przesunięciem:
Uszy muszą zostać usunięte, będą przeszkadzać.
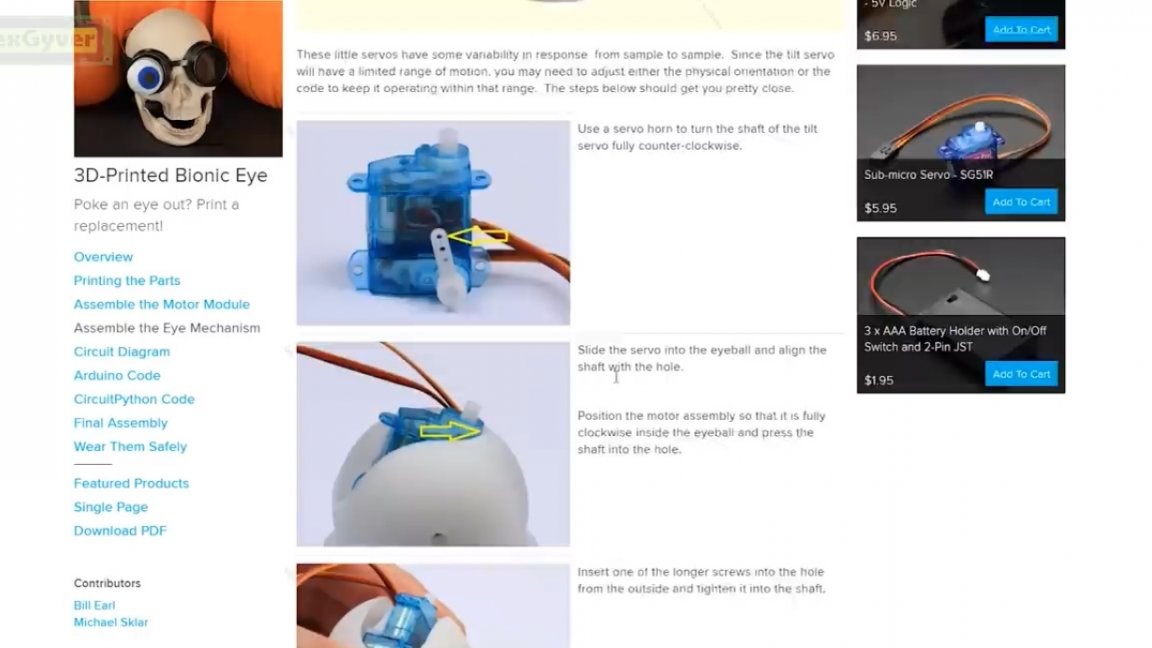
Następnie do dolnego napędu zaczepiamy wahacz i obracamy wałek w kierunku przeciwnym do ruchu wskazówek zegara.

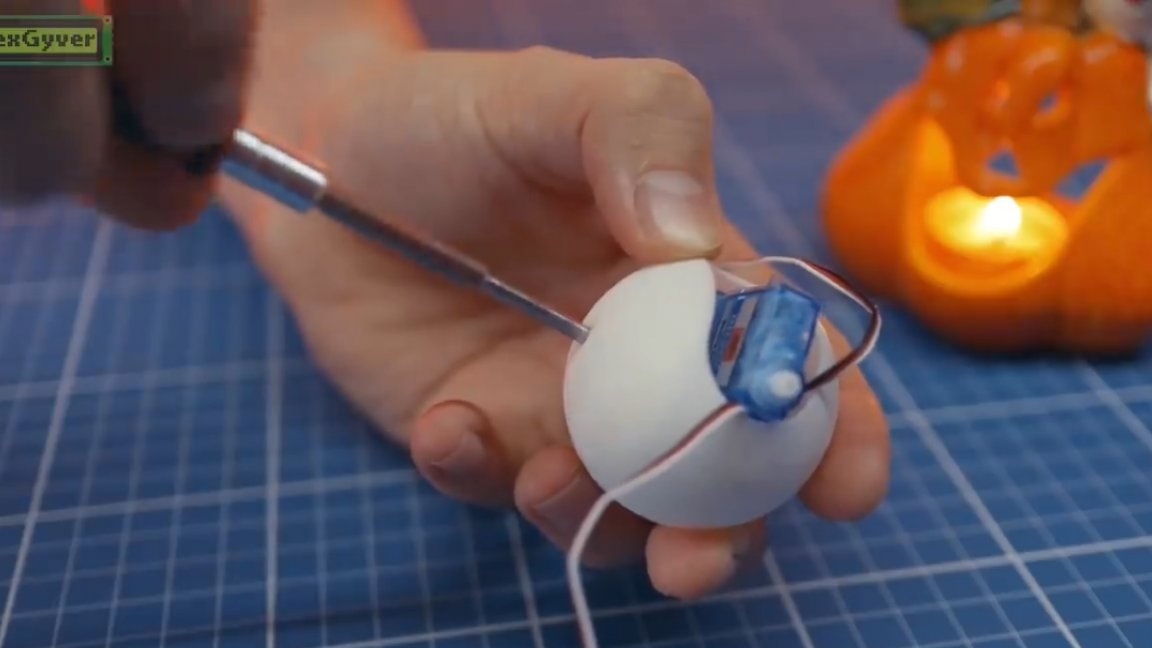
Włóż serwomechanizmy do wstępnie zadrukowanego Drukarka 3D ślepa (oko).
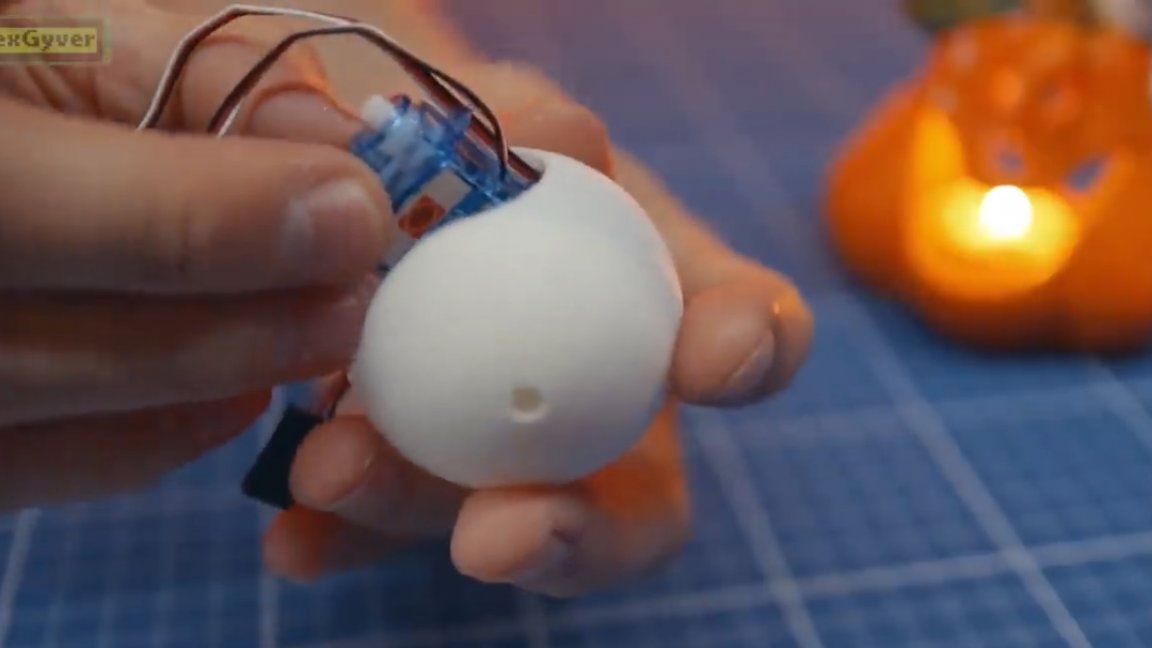
Opieramy wystający napęd na samą krawędź i wkładamy wał wyjściowy do otworu w oku.

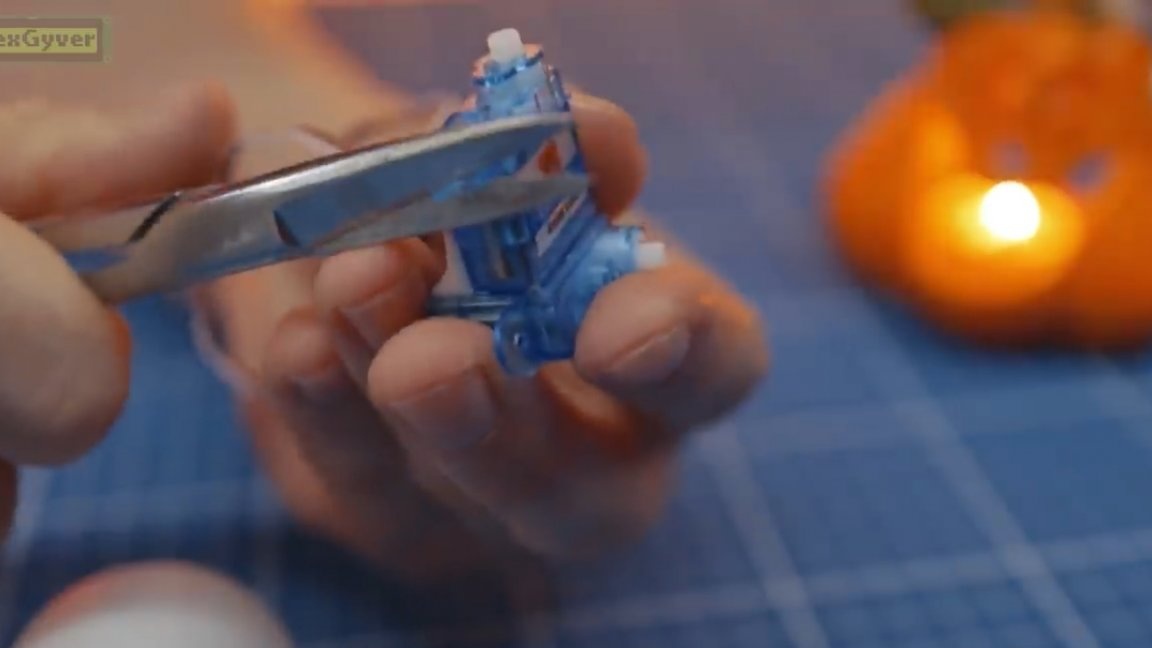
Długa kompletna śruba musi zostać nieco skrócona. Można to zrobić za pomocą szczypiec.

Następnie za pomocą skróconej śruby naprawiamy wewnętrzny dysk.
Jeśli masz serwo tester, możesz sprawdzić, czy mechanizm wynikowy działa.
Następnie przymocowujemy drugą część oka do wału drugiego napędu, a także mocujemy.

Jesteśmy przekonani o ogólnej wydajności (powinny współpracować).


Specjalnie dla tego projektu autor napisał prosty kod, który płynnie obraca dyski pod przypadkowym kątem. Ale środek oka był nieco stronniczy, więc znajdujemy rzeczywiste centrum i rysujemy źrenicę.

Ponieważ jest to projekt wakacyjny, a święto jest dość specyficzne, zróbmy to trochę bardziej okropne.

Następnie włóż powstałą część do szklanek.

Jeśli nie jest włożony, należy trochę fazować.

Następnie składamy wszystko w całość.


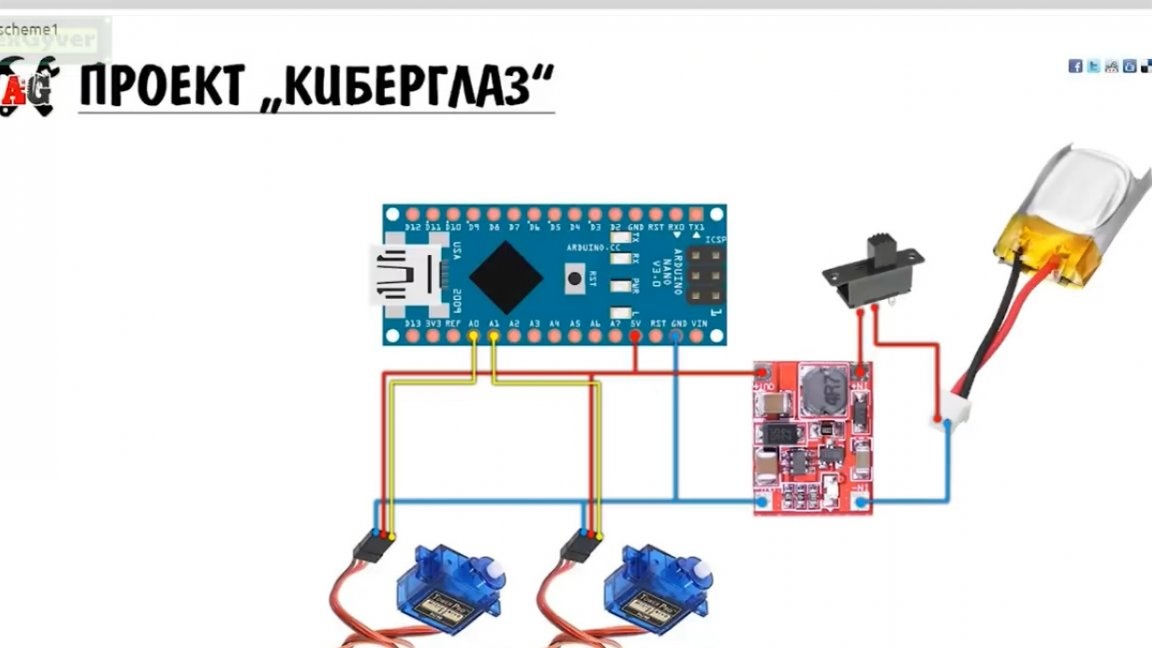
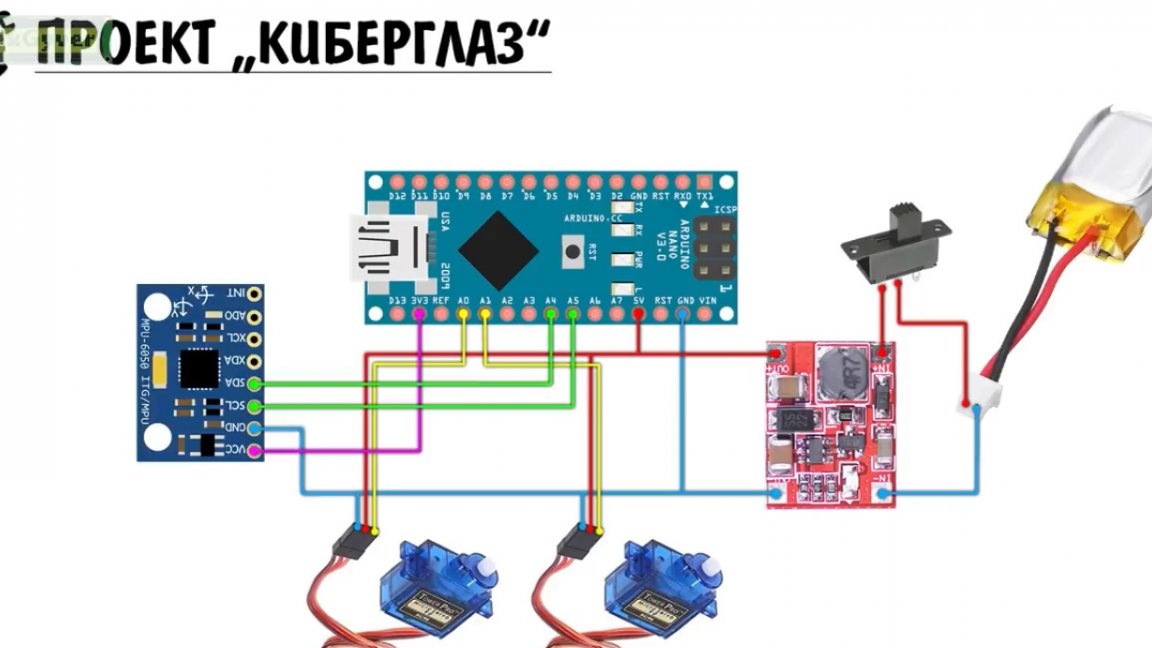
Następnie łączymy wszystkie komponenty zgodnie z następującym schematem:
Wszystko jest gotowe, ale teraz każdy napęd po prostu podnosi się pod przypadkowym kątem, i w zasadzie możesz tak to zostawić.

Ale pamiętasz na początku artykułu wspomniano o mechanizmie i układzie współrzędnych? Tak więc mechanizm obraca się wzdłuż dwóch osi, ale nie wzdłuż tych, wzdłuż których obraca się ludzkie oko. Naszym celem jest, aby taki mechanizm zachowywał się dokładnie tak, jak ludzkie oko. Na pierwszy rzut oka wydaje się to niemożliwe, ale możesz spróbować przywrócić normalny układ współrzędnych, aby ustawić ucznia w dowolnej pozycji.
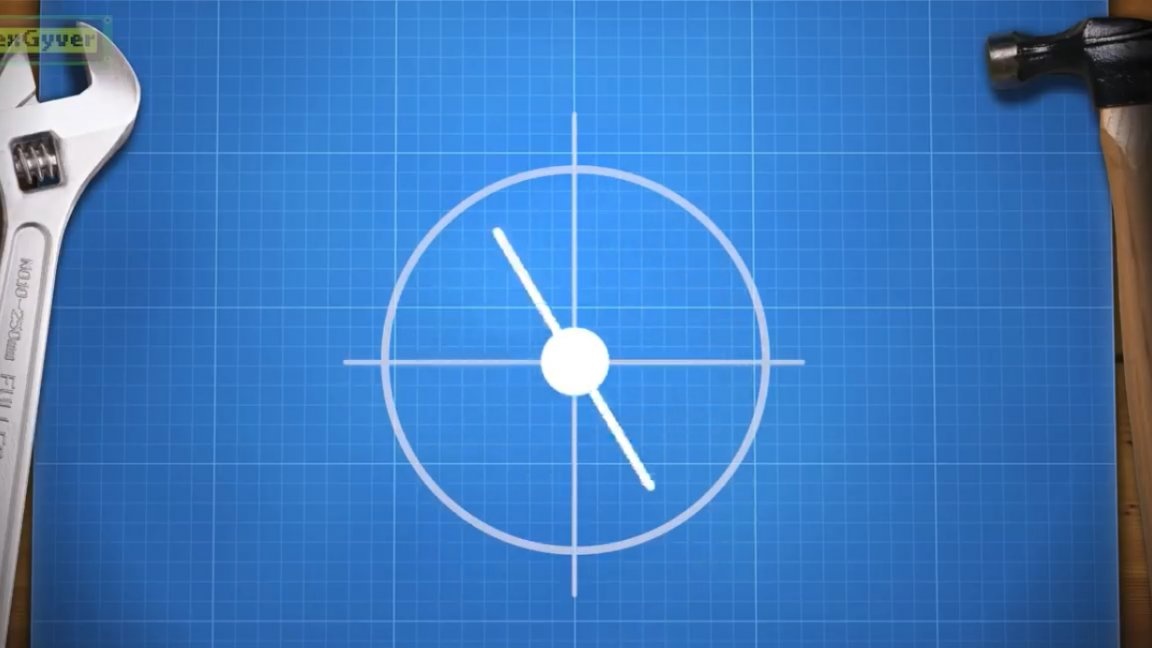
Mamy więc dwa kąty, oznaczamy je X i Y.

Y to mały kąt oka, a X to kąt obrotu oka o 180 stopni.
Aby osiągnąć wszystkie możliwe pozycje, konieczne jest kontrolowanie obu kątów, i istnieje specyfika. Zacznijmy od najprostszego - ruch kołowy o maksymalnym promieniu.
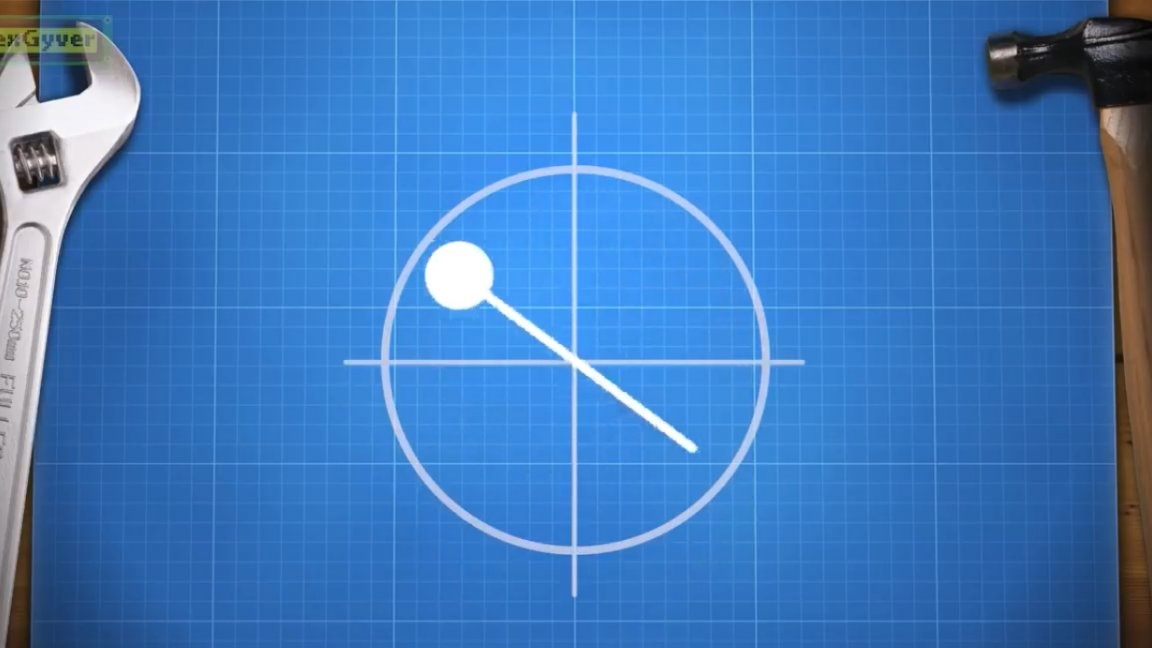
Ale to nie jest takie proste, jak się wydawało. Dlatego pierwszą rzeczą, którą zrobił autor, był biegunowy układ współrzędnych, w którym można ustawić kąt obrotu oka i promienia, czyli usunięcie źrenicy z centralnego punktu 00.
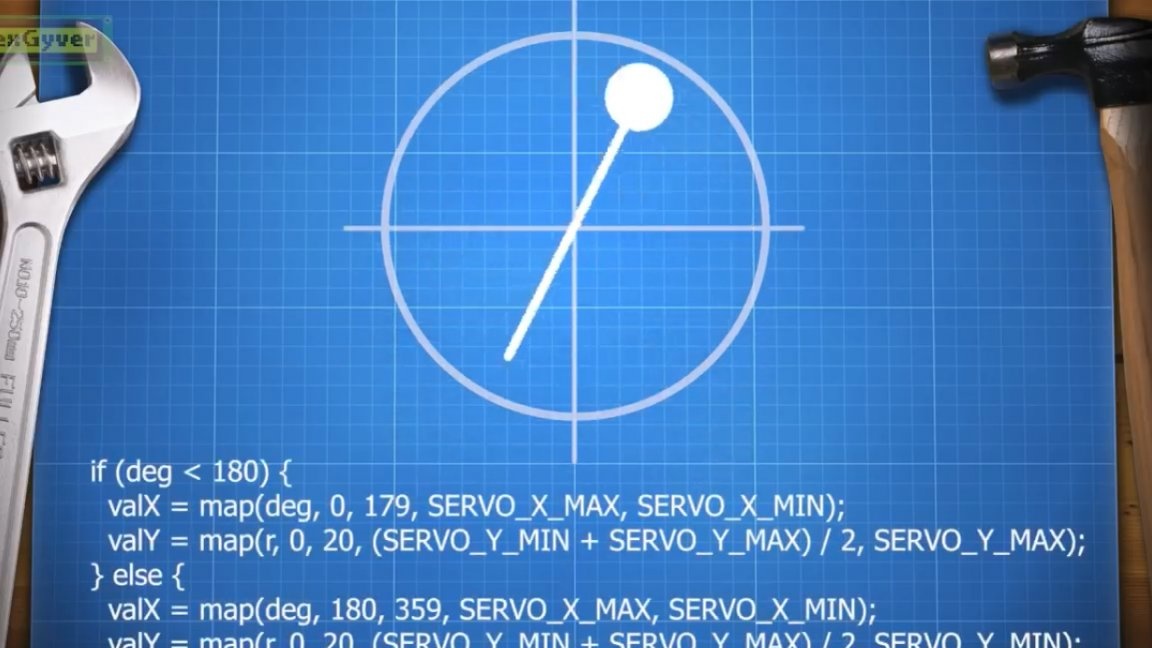

W górnym półkolu pracujemy od połowy kąta Y do jego wartości maksymalnej, aw dolnym - od minimum do połowy. Teraz ruch oka można zaprogramować w bardziej interesujący sposób. Same ruchy są losowe, ale już na obwodzie.


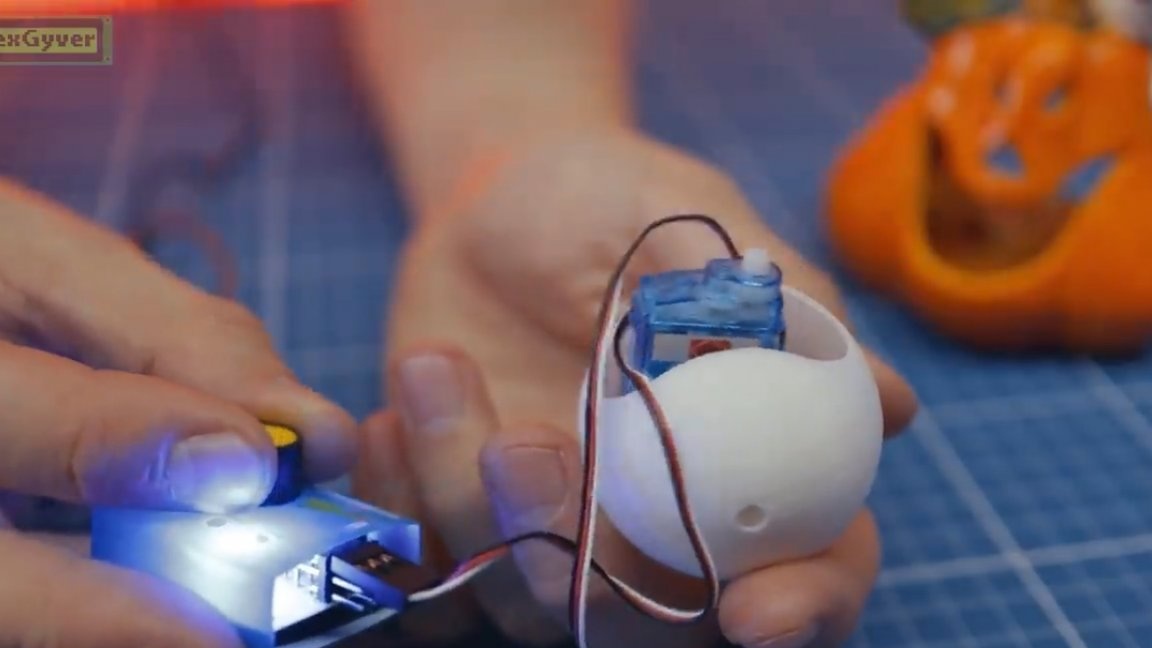
Teraz przylutujmy całą elektronikę, wszystko jest jak na schemacie:
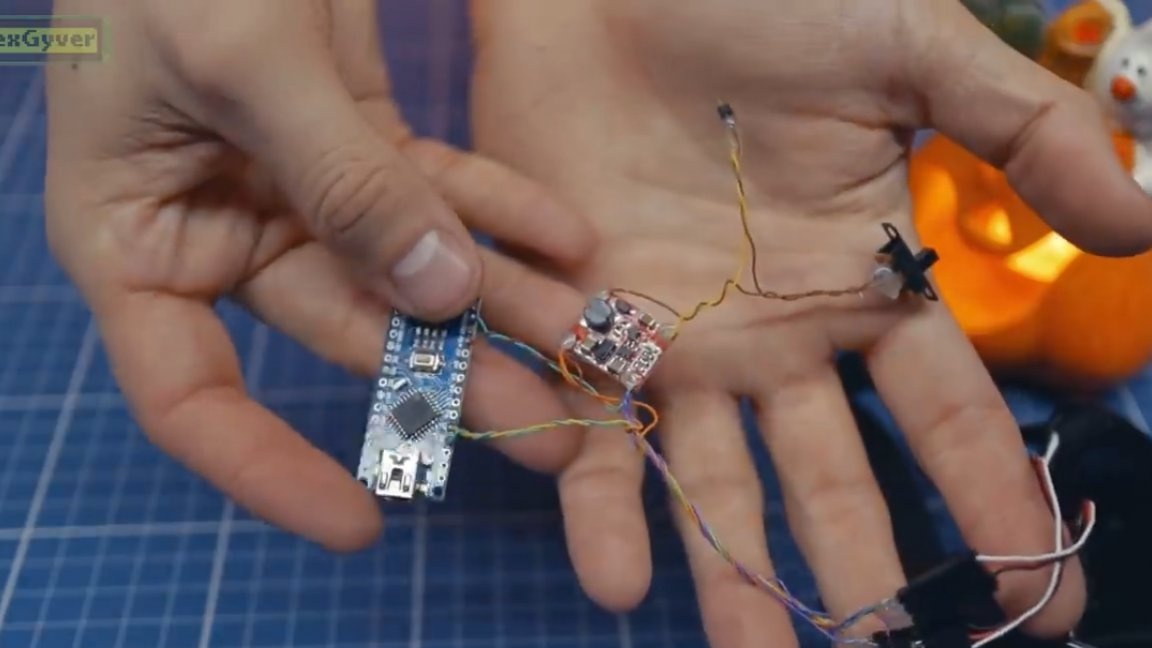
Próbuję to włączyć.
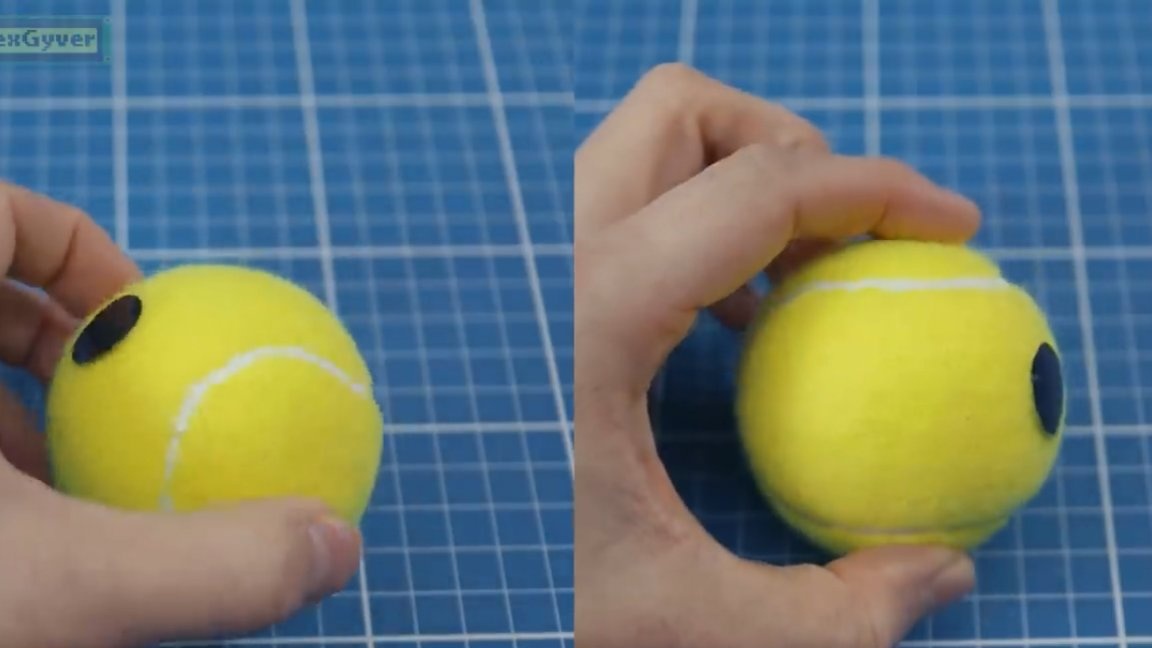
Wskazanie jest. Teraz chowamy to wszystko w jakimś budynku (w tym przypadku autor użył pola tykania do tac).

Wszystkie nasze cyber-oczy są gotowe. Oto taki żart.


Ale nadal kontynuujmy nasze teoretyczne badania i przetłumaczmy biegunowy układ współrzędnych na kartezjański, później zrozumiem dlaczego.

Tutaj wszystko jest proste, pomoże nam funkcja atan2, która zwraca kąt w radianach od –P do P, oraz funkcja hypot, która obliczy długość przeciwprostokątnej w tych samych dwóch współrzędnych, a przeciwprostokątna jest promieniem dla naszej poprzedniej funkcji.

I w tak prosty sposób nasz eksperymentalny przedmiot może teraz skierować oko dokładnie tam, gdzie go potrzebujemy (góra, dół, prawo, lewo).

Dlaczego to jest potrzebne? Jest to konieczne, aby móc dodać żyroskopza pomocą którego oko zwróci się w tym samym kierunku co głowa, co prawdopodobnie będzie wyglądać raczej śmiesznie. Właściwie projekt został dodany żyroskop MPU6050, tak to wygląda na schemacie:
Zmień kod, upewnij się, że odczyty żyroskopu odchylają oko. Naturalnie przez filtr.

Co w końcu otrzymamy? Oko jest nieco spóźnione za obrotem głowy, tworząc w ten sposób efekt, że obraca się w prawo i patrzy na ciebie. W rezultacie oto taki mały projekt matematyczny.

Oprogramowanie układowe TUTAJ. Dziękuję za uwagę. Do zobaczenia wkrótce!
Wideo autora: