

Mobilna stacja ładowania, wykonana przez Instructables pod pseudonimem awood22, jest wygodna w użyciu w kręgu robotów. Jest to dwustronny wózek rolkowy, po każdej stronie którego znajduje się saszetka z kieszeniami do przechowywania akumulatorów do robotów. Również na stacji znajdują się przedłużacze do zasilania ładowarek, które umożliwiają ładowanie akumulatorów bezpośrednio w kieszeniach.
Aby wykonać podstawę, mistrz bierze cienki drewniany arkusz i trzy pręty o przekroju 50 x 100 mm i długości 900 mm. Pozostawia dwa takty, jak jest, trzeci skraca się do 565 mm. Pozycje, jak pokazano na poniższych zdjęciach. Dokręca śrubami. Wierci otwory w odległości 540 mm od siebie.




Baza jest gotowa, czas na stację ładującą. Mistrz bierze jeszcze dwa takie same pręty, nie skraca żadnego z nich, wierci otwory w podstawie, aby umożliwić ich przymocowanie, a następnie mocuje pręty za pomocą tych śrub, jak pokazano poniżej:
Następnie mistrz bierze dwa drewniane arkusze, wykonuje wnękę w każdym z nich o wymiarach 159 x 76 mm i mocuje je za pomocą wkrętów samogwintujących do pionowych prętów z każdej strony, jak pokazano na poniższych zdjęciach. Następnie do tych części wózka przymocuje saszetkę z kieszeniami na baterie.




Mistrz wykonuje dwa panele boczne, a następnie na każdym z nich wierci otwory w odległości 530 mm od siebie, jak pokazano poniżej:



Ale wysokość paneli bocznych jest zbyt mała, ponieważ są wycinane z odpadów:

Dlatego mistrz z tych samych odpadów wykonuje dodatkowe części, które zwiększają wysokość do niezbędnego:

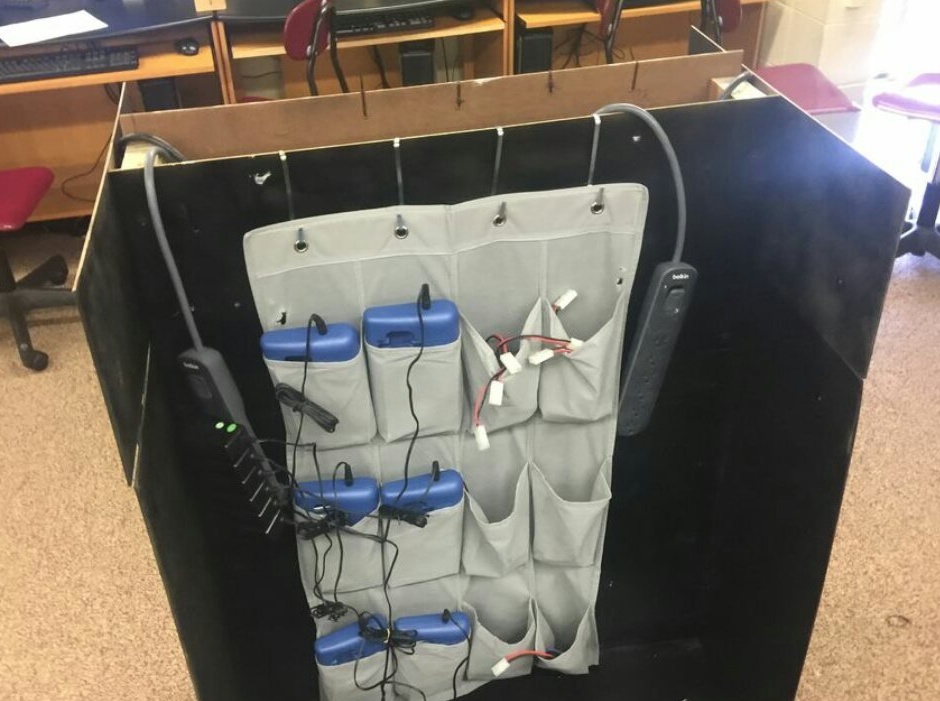
Wynik takiego wzrostu zmontowanego wózka wygląda tak, jak można go zobaczyć na KDPV, więc nie trzeba przewijać w górę, a następnie w dół, pokażę jeszcze raz:
Mistrz wycina dwa cienkie drewniane arkusze o wymiarach 750 x 229 mm, wierci w nich otwory w odległości 686 mm od siebie, a następnie wkręca je śrubami u dołu z każdej strony równolegle do arkuszy w celu przymocowania saszetek i odpowiednio prostopadle do paneli bocznych.Arkusze te umożliwiają przechowywanie na dole stacji ładującej niektórych przedmiotów, które nie spadną na podłogę.



Mistrz maluje gotowy wózek za pomocą farby z aerozolu:

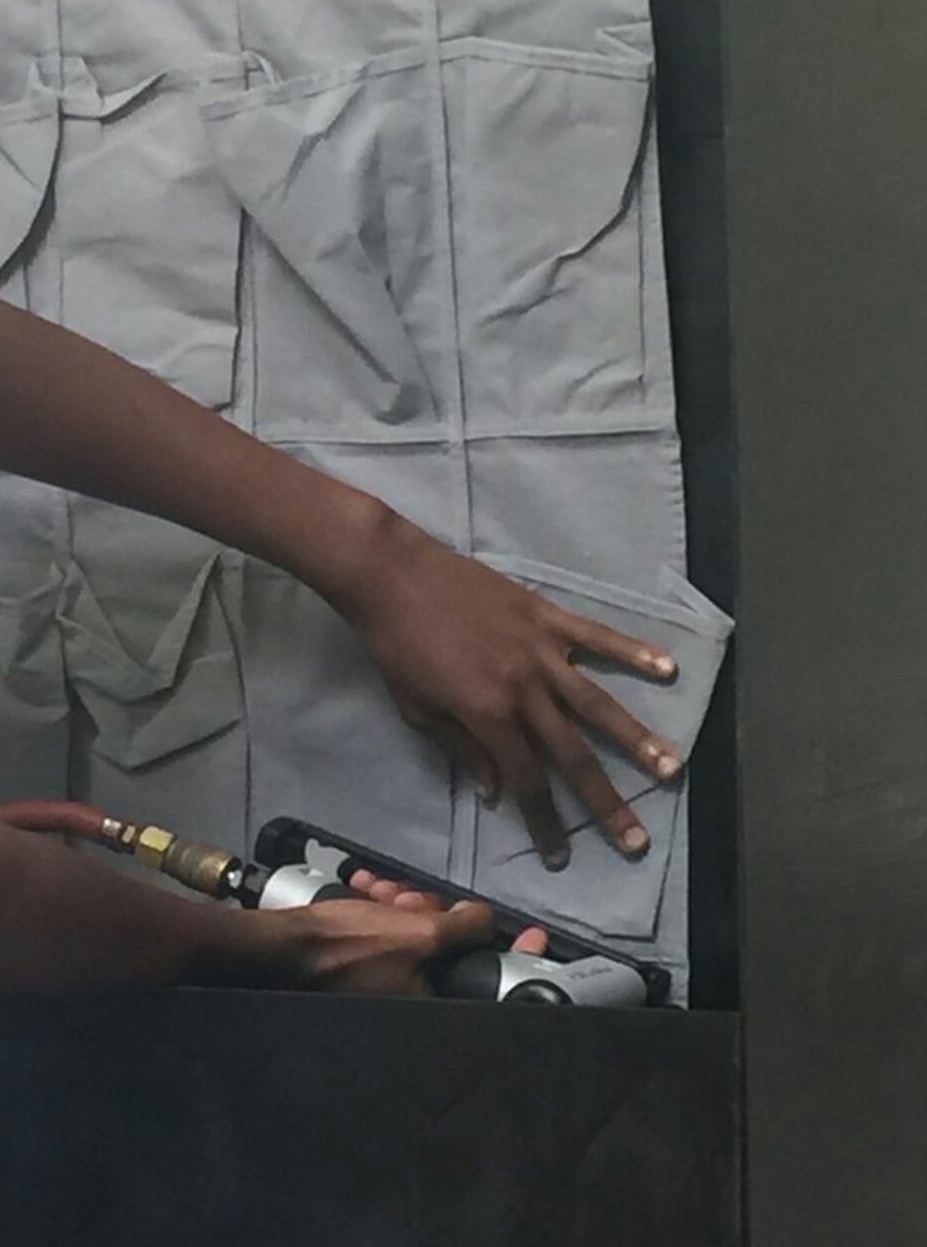
Bierze gotową saszetkę z kieszeniami, przecina ją na pół, mocuje połówki z każdej strony do przeznaczonych do tego drewnianych prześcieradeł. Zrobią dwie domowe saszetki.

Umieszcza uchwyty na panelach bocznych do przemieszczania wózka. W tym przypadku są drukowane w 3D, ponieważ w klubie robotyki wciąż jest drukarka 3D, dlaczego miałby stać bezczynnie? Ale pasują na przykład klamki do drzwi.

Master równolegle (używając konwencjonalnego przedłużacza) przedłużaczy z wbudowanymi filtrami interferencyjnymi, wierci otwór na przewód wchodzący w konwencjonalny przedłużacz i wyprowadza go:

Dodaje filmy, jak pokazano na poniższych zdjęciach, co sprawia, że stacja ładująca jest mobilna, co było pierwotnie wymagane. Kołki rolek muszą być przyklejone do uchwytów (również wydrukowanych w 3D), aby nie wypadły.



Ponadto mistrz wskazuje błędy, których nie powtórzyłby, gdyby musiał ponownie wykonać taką stację ładowania:
1. Zamiast cienkich drewnianych arkuszy używałby sklejki.
2. Uchwyty wałków z nadrukiem 3D nie były wystarczająco mocne, więc użyłby gotowych.
3. A co najważniejsze - najpierw zmierzy szerokość drzwi autobusu, na którym koło idzie na zajęcia terenowe, i zmniejszy stację, aby można ją było zabrać ze sobą.
Ale historia nie toleruje trybu łączącego i wszystkich tych „życzeń”, a przywódcy innych kół robotycznych mogą uniknąć odpowiednich błędów przy powtarzaniu tego projektu. Ogólnie rzecz biorąc, okazało się to bardzo przydatne: ładowarki i baterie nie są już rozrzucone po całym kręgu, znalezienie ich nie zajmuje czasu, co można przeznaczyć na proces edukacyjny.