

Dzisiaj autor Instructables pod pseudonimem Techgenie mówił o tym, gdzie elektronika jest I przyniósł link do pierwszego, w którym jest to nie tylko elektryk. Jest bardziej elegancki i zostanie to omówione w moim tłumaczeniu.
Jeśli nadal nie chcesz, abyś go miał, obejrzyj wideo i zgłoś to urządzenie do domu od pierwszych sekund oglądania:
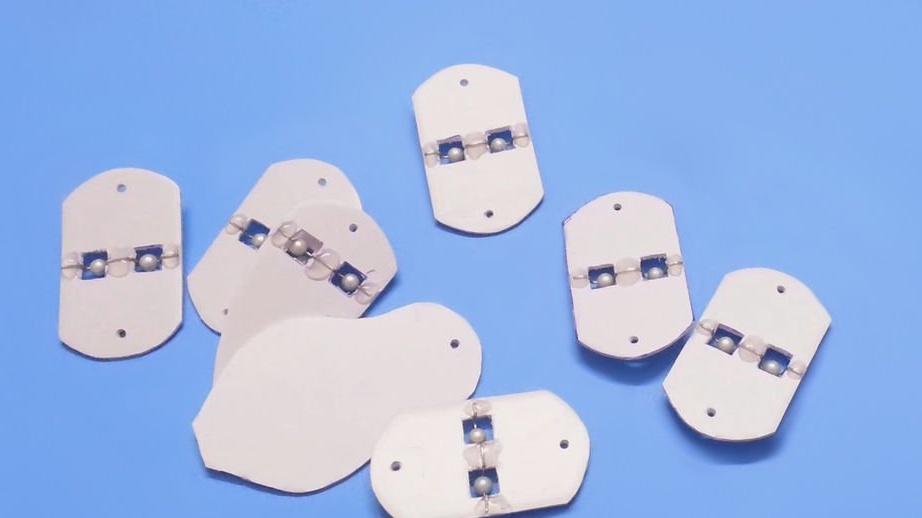
Mistrz wycina z kartonu połączenia węża robota:
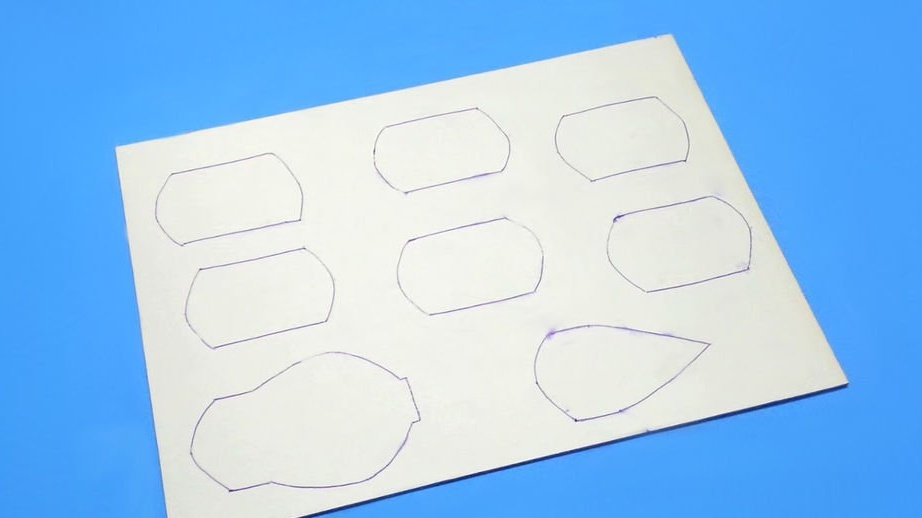
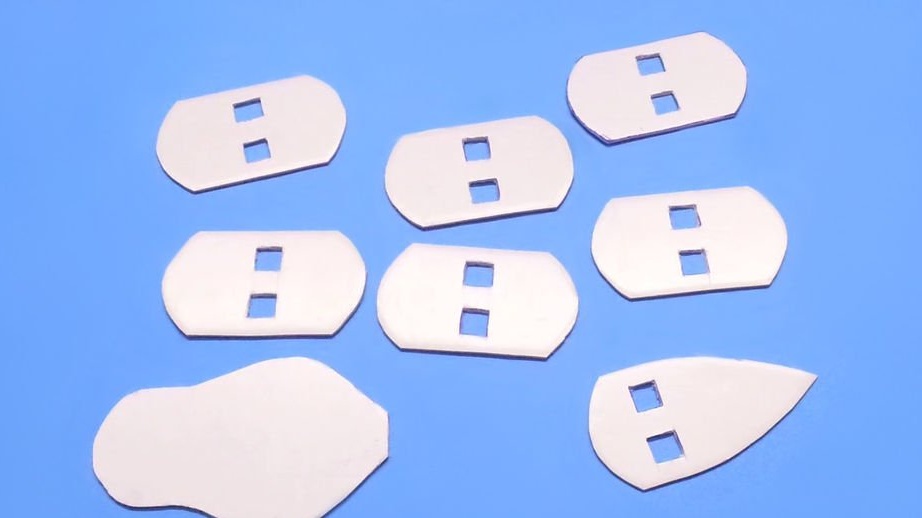
Wyciągi z arkusza:

Wykonuje w nich kwadratowe otwory na rolki:
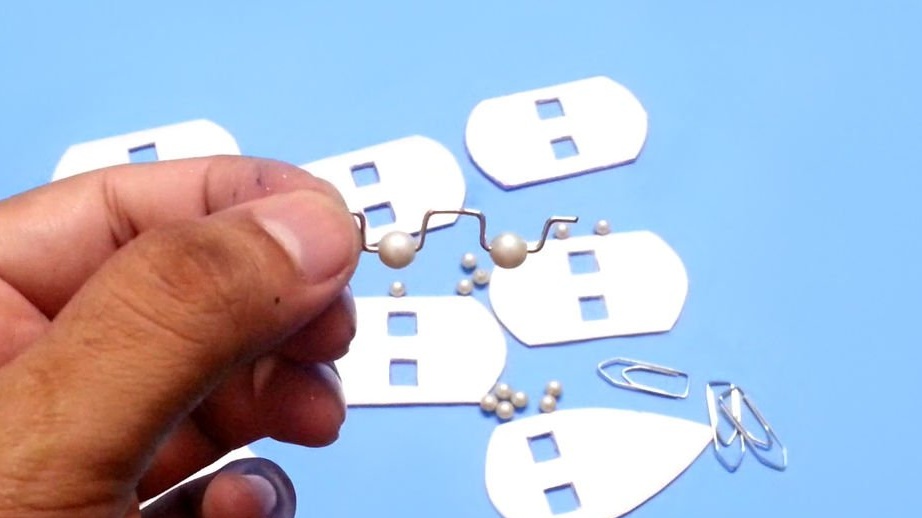
Który sprawia, że koraliki i spinacze, pozdrowienia „DU Wasilij Biletsky”:
Naprawia oś wałków za pomocą pistoletu do kleju, upewnia się, że same wałki nie są zakleszczone klejem. Wywierca otwory do łączenia ogniw:
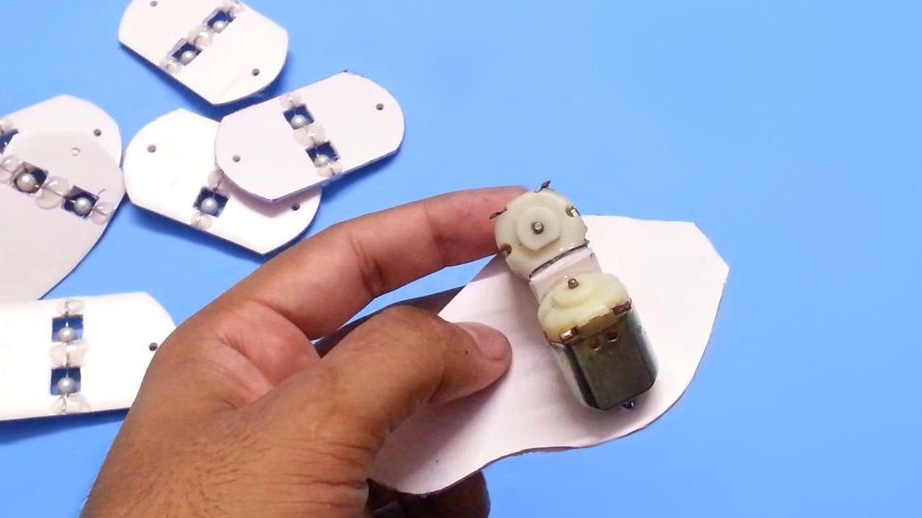
Przylega do trójkątnego uchwytu do silników prądu stałego:

Stosuje silniki, uwagi dotyczące wiercenia otworów na wały, wiertarki, wały gwintowane, silniki do klejenia:
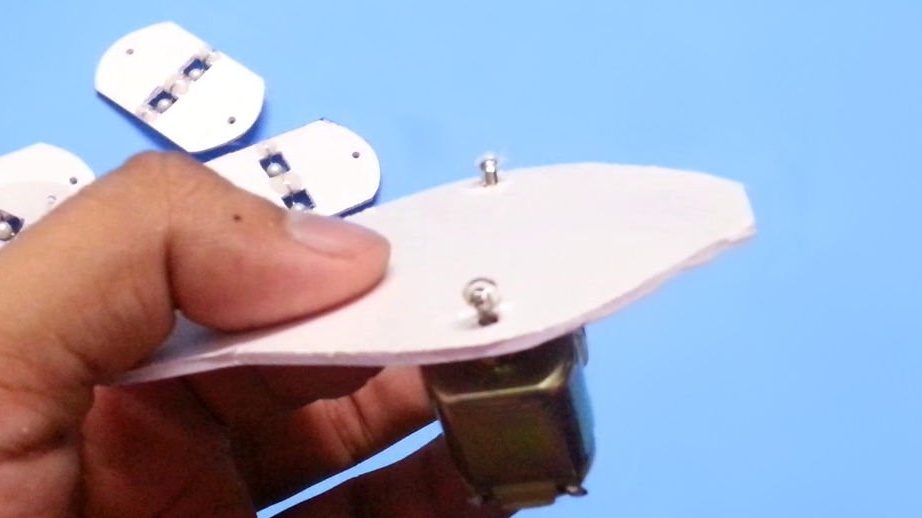
Na wałach silników tworzy klejowe kulki:
Łączy linki za pomocą ... drutu i przycisków:
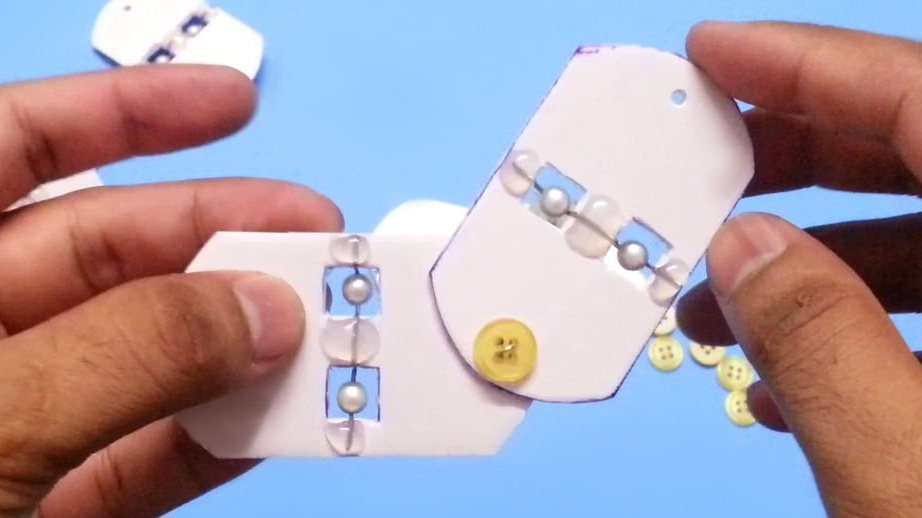
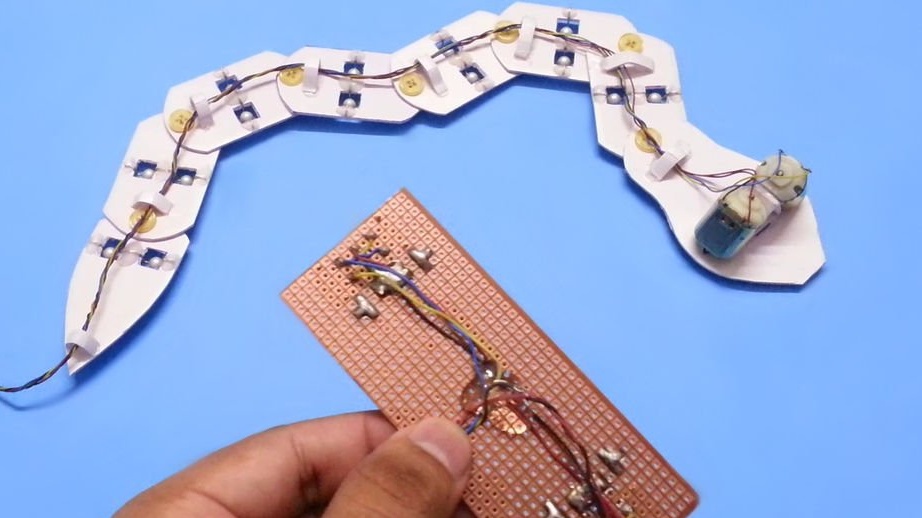
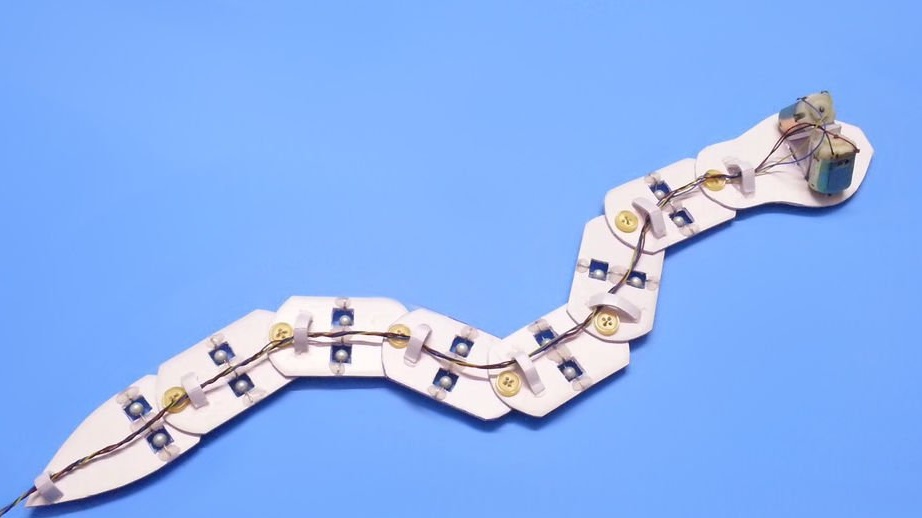
Wąż robota jest zmontowany, ale nadal nie porusza się:

Tnie tekturowe paski, bierze czteroprzewodowy kabel, lutuje dwa przewody do każdego silnika, mocuje za pomocą pierwszego paska:

A reszta:
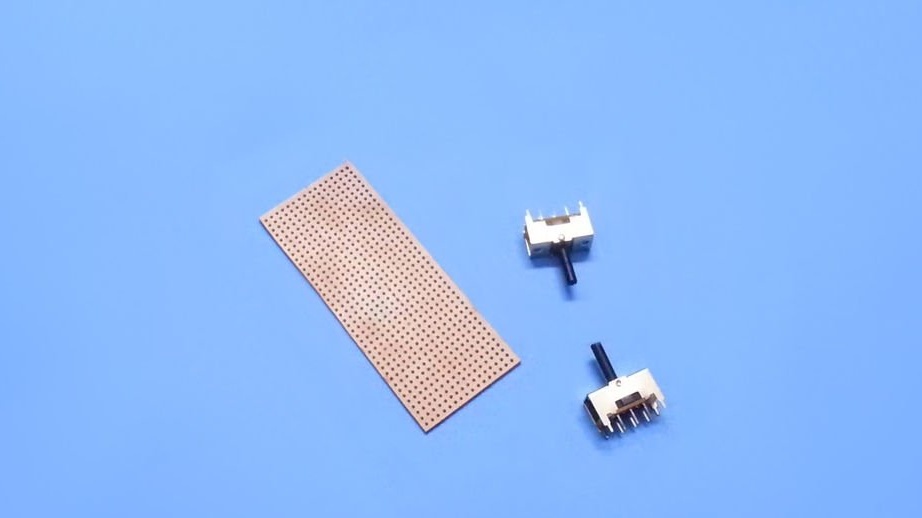
Zajmuje dwa przełączniki w trzech pozycjach (środkowy na wyłączony) i w dwóch kierunkach, a także kawałek płyty pilśniowej:
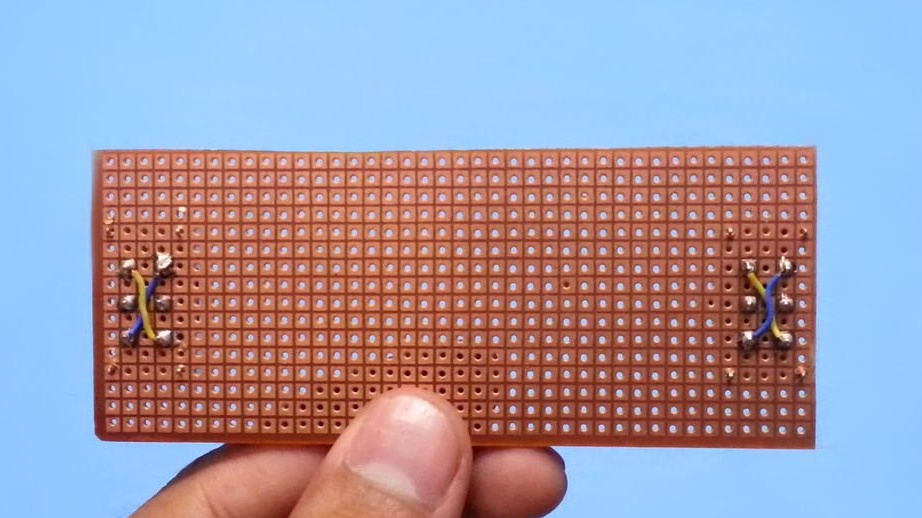
Za pomocą zworek zamienia oba przełączniki w przełączalne:
Robi sprężyny do baterii 18650 z spinaczy biurowych. Nie rób tego! Weź gotowy schowek! Używaj baterii tylko z ochroną! Jeszcze lepsza jest 2-częściowa wnęka. AA lub AAA z odpowiednimi ogniwami lub bateriami.
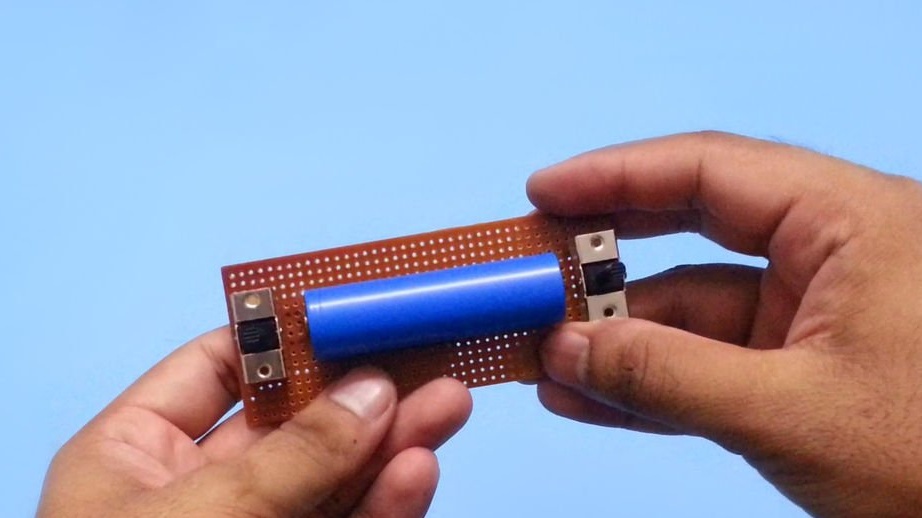
Zszywki wzdłużne przyczyniają się do utrzymania baterii na miejscu:
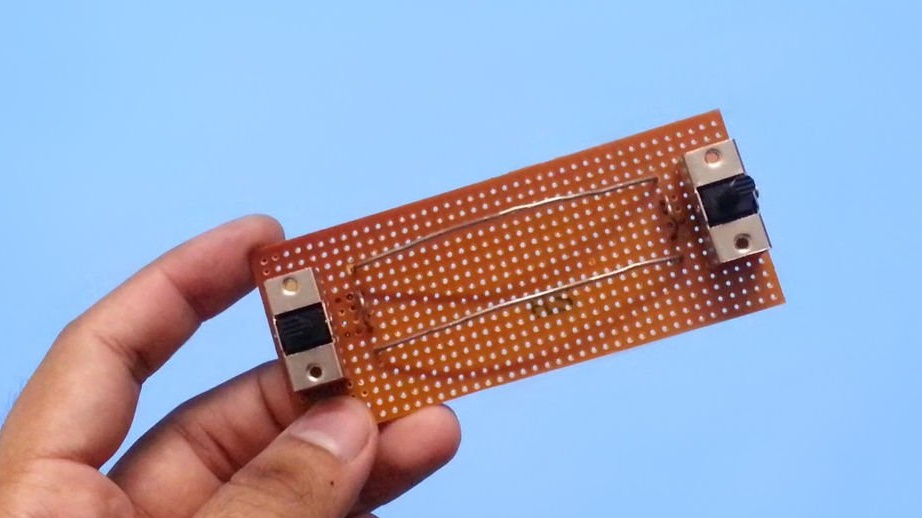
Podczas gdy tylna strona płyty zdalnego sterowania wygląda:
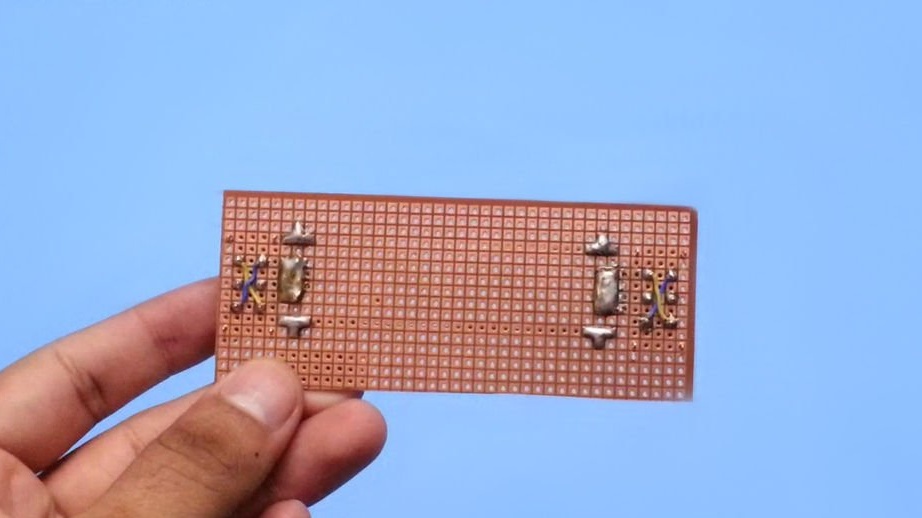
Master łączy kabel robosnake, wykonuje połączenia zgodnie ze schematem:

Teraz druga strona płyty zdalnego sterowania wygląda inaczej. Kabel jest przymocowany za pomocą kleju topliwego, ważne jest, aby pomiędzy nim a płytą chlebową znajdowała się warstwa izolacyjna. Teraz ta strona płytki musi być pokryta dielektrykiem, ponieważ impulsy samoindukcyjne pojawiają się, gdy silniki są wyłączone.
To wszystko zrobione:

Ze względu na cechy konstrukcyjne robosnake, przy tych samych położeniach przełączników, silniki muszą obracać się w przeciwnych kierunkach. Jeśli tak nie jest, jedną z nich należy odwrócić. Następnie eksperymentalnie wybierz pozycję pilota, w którym pozycja do przodu obu przełączników odpowiada ruchowi do przodu. Silniki można zatrzymać i odwrócić osobno, zmuszając robosnake do wykonywania różnych lew.