
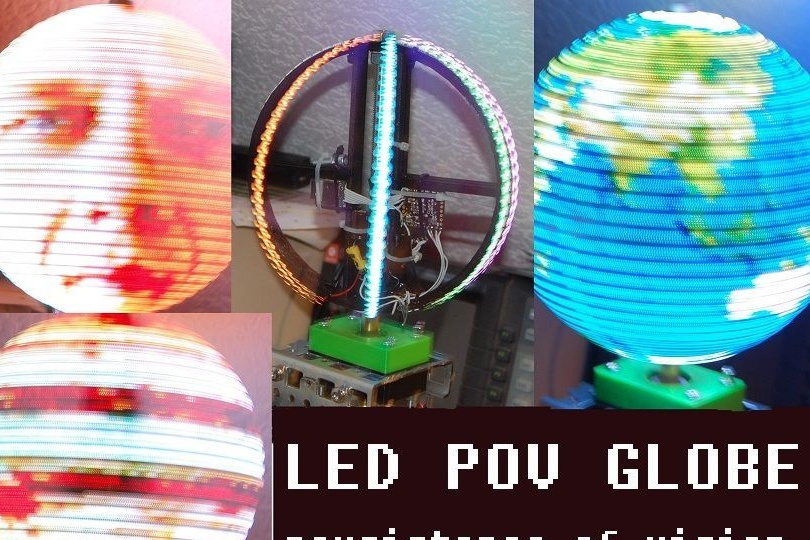
Ten samouczek dotyczy budowania globu POV za pomocą mniejszej ilości. elektroniczny komponenty niż inne podobne urządzenia. Dzięki zastosowaniu diod LED RGB ze zintegrowanym kontrolerem APA102. Pozwoli to zaoszczędzić lutowanie wielu drutów. Możesz przeczytać o nich więcej. Te diody LED nie wymagają dodatkowego sterownika. Są one podłączone bezpośrednio do mikrokontrolera na dwa sposoby. Pozwala to bardzo szybko przełączać diody LED. Aby uzyskać stabilny obraz, synchronizacja SPI odbywa się na częstotliwości 10 MHz. Kolejnym plusem tego projektu jest użycie karty flash, która przechowuje obraz w formacie BMP.
1 Wymagane materiały

Do osi globu potrzebujesz:

1. Kołek z gwintem M8 i długości 250 mm
2. Nakrętka M8
3. Tuleja mosiężna o długości 10 mm i 100 mm
4. Podkładki plastikowe 8 mm 2 sztuki (dołączone pliki STL)
5. sprzęgło dla tych, którzy będą korzystać z silnika krokowego NEMA 17
Aby zasilić pierścień LED na wale, potrzebujesz
1. łożysko kulkowe 6300 (10x35x11)
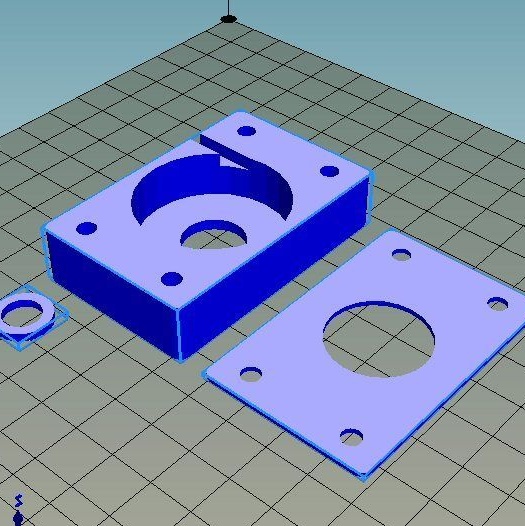
2. dwa wsporniki do łożysk. Wydrukowano na drukarce 3d lub wykonano z drewna.
3. Cztery śruby M4x40 z nakrętkami
4. Końcówki na drutach 2 szt. 8mm
5. o średnicy wału 5 mm
6. 4 śruby M4 do montażu silnika
7. może fanem tego.
Alternatywnie możesz użyć dowolnego silnika z odpowiednim momentem obrotowym i kontrolą prędkości. Silnik zastosowany w tej konstrukcji ma maksymalny moment obrotowy przy prądzie 50A, ale maksymalny pobór prądu podczas pracy wynosi tylko 18A.
Aby sterować serwomotorem, użyj
1.
2. dwa przyciski
Zasilacz 12V dla silnika i 5V dla diod LED. Jako zasilacza możesz użyć starej jednostki z komputera. Możesz kupić zasilacz 12v / 5A i podłączyć się do niego
Do pierścienia LED potrzebne będą:
1.664 diody LED 2 paski po 32 sztuki
2. Kondensator 1000µF 10 V.
3. Czujnik Halla i magnes
4. Rezystor podciągający 1k, 10k
5. Pierścień należy wydrukować na drukarce 3D lub użyć kawałka rury PVC
6. Opaski plastikowe (100 mm)
7. Dobry klej, który skleja się ze sobą i nie rozpada się przy 2500 obr./min
Będziesz także potrzebował mikrokontrolera śmigła Parallax. Lub możesz użyć innego model kontrolera, ale dodatkowo pobierać opłatę za. Ten kontroler jest zaprogramowany i flashowany tak prosto jak Arduino. Będziesz potrzebował adaptera USB-TTL, aby zaprogramować oba kontrolery.
Body.
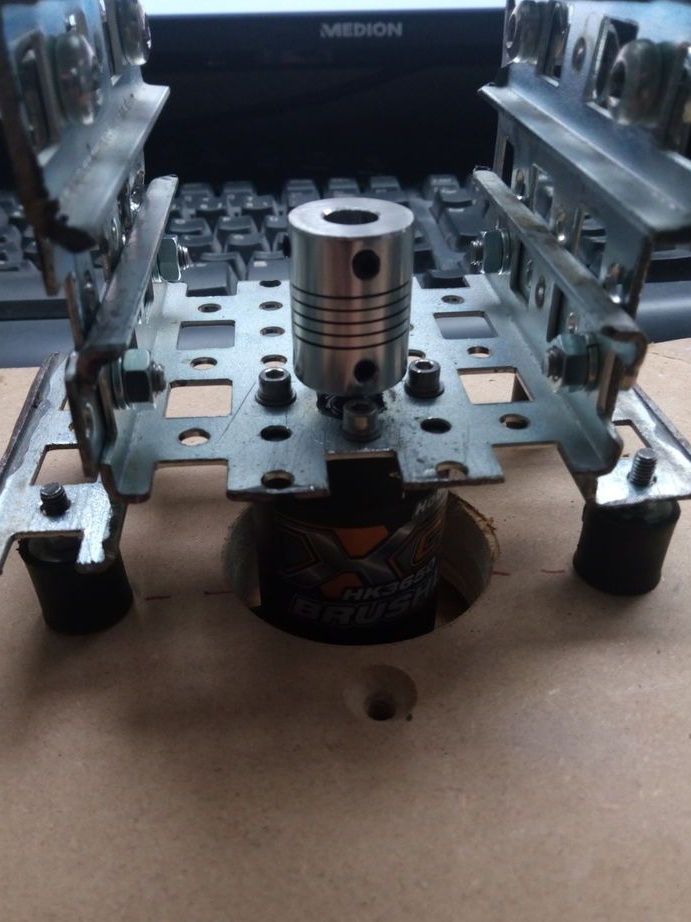
Obudowa dla domowej roboty Możesz wziąć wystarczająco dużo. Najważniejsze jest to, że możesz bezpiecznie zamocować silnik i łożyska.
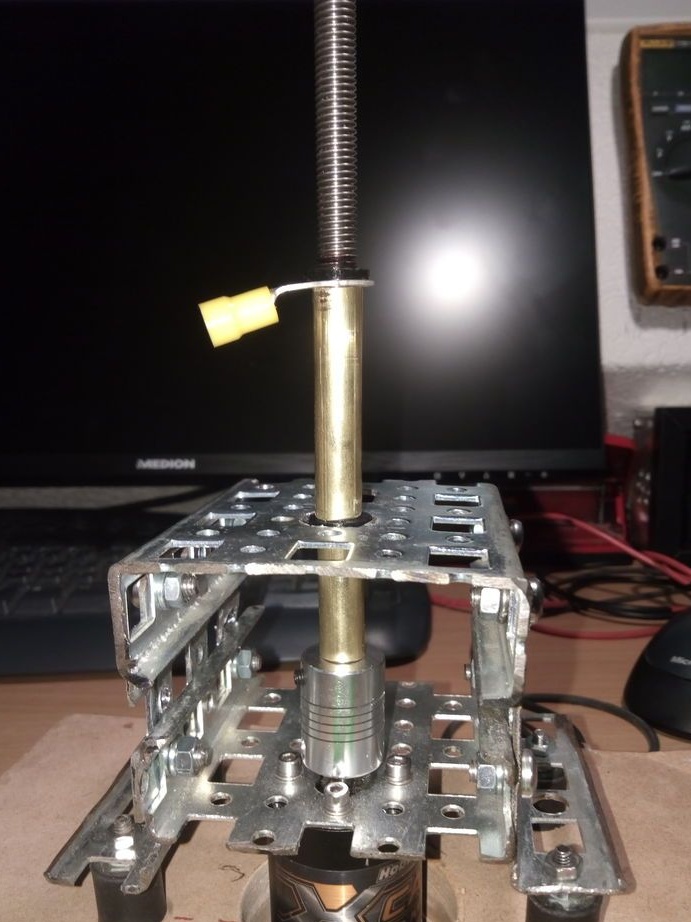
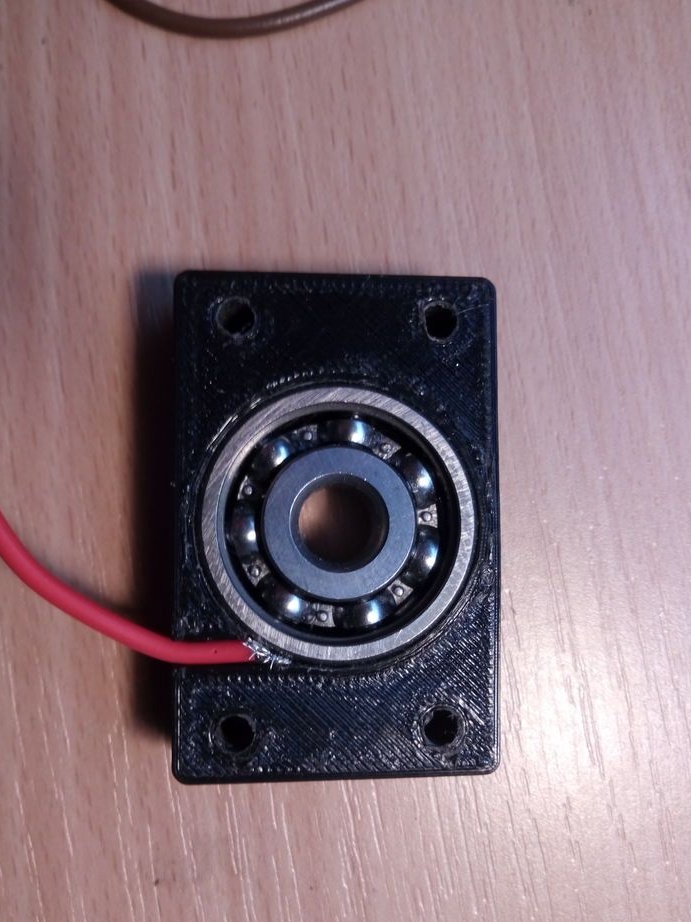
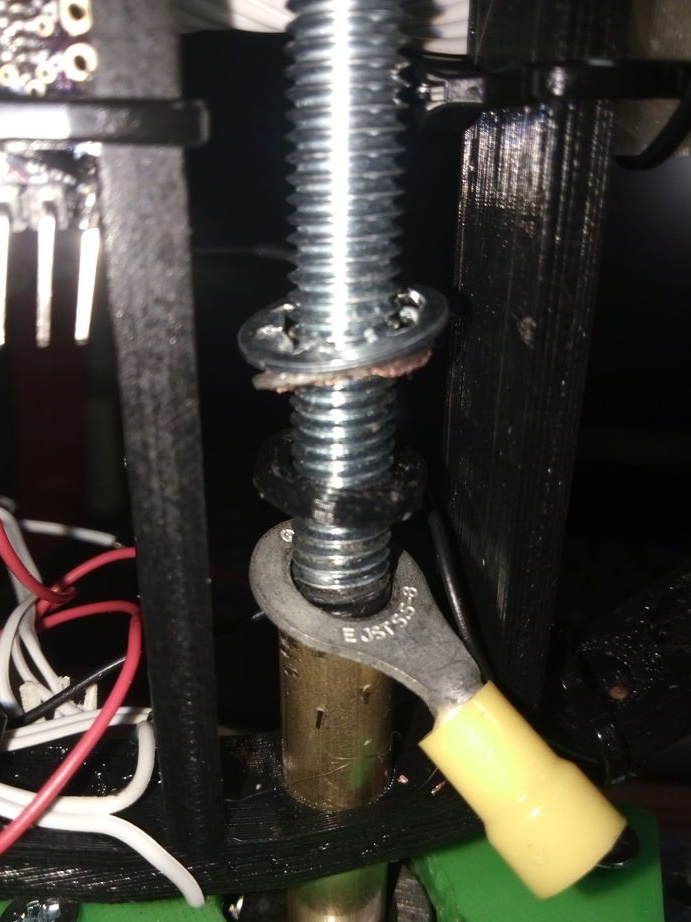
Do wałka napędowego zastosowano kołek o długości 250 mm.Długość mosiężnych tulei wynosi 50 i 30 mm. Zależy od rozmiaru pierścienia i długości wału. Górna i dłuższa tuleja musi być odizolowana od kołka, ponieważ służy do dostarczania dodatkowej mocy do diod LED. Aby to zrobić, owinąć taśmą elektryczną spinkę do włosów lub użyć termokurczliwej, będą również potrzebne dwie podkładki z tworzywa sztucznego. Tuleję należy wywiercić do 8,5-9 mm, w przeciwnym razie nie będzie pasować. Drugi rękaw wraz z prętem tworzy styk ujemny.
Moc ujemna jest umieszczana w specjalnym rowku i dociskana do łożyska w wsporniku, które można wydrukować na drukarce. Plik wspornika STL w archiwum.


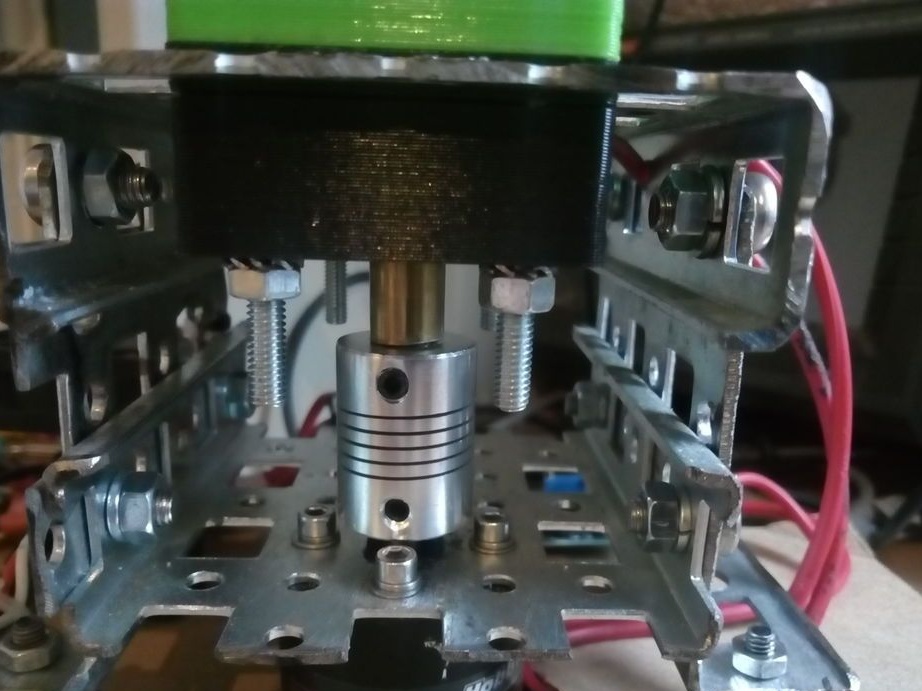
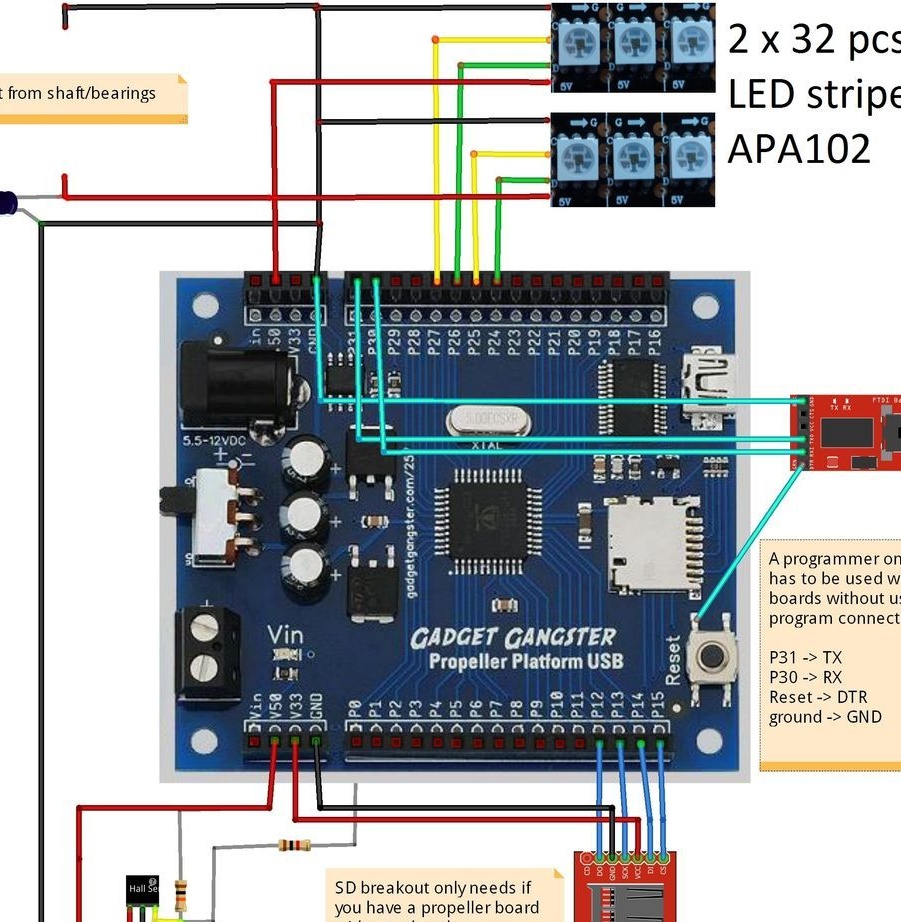
Teraz musisz podłączyć silnik elektryczny, jak pokazano na schemacie.
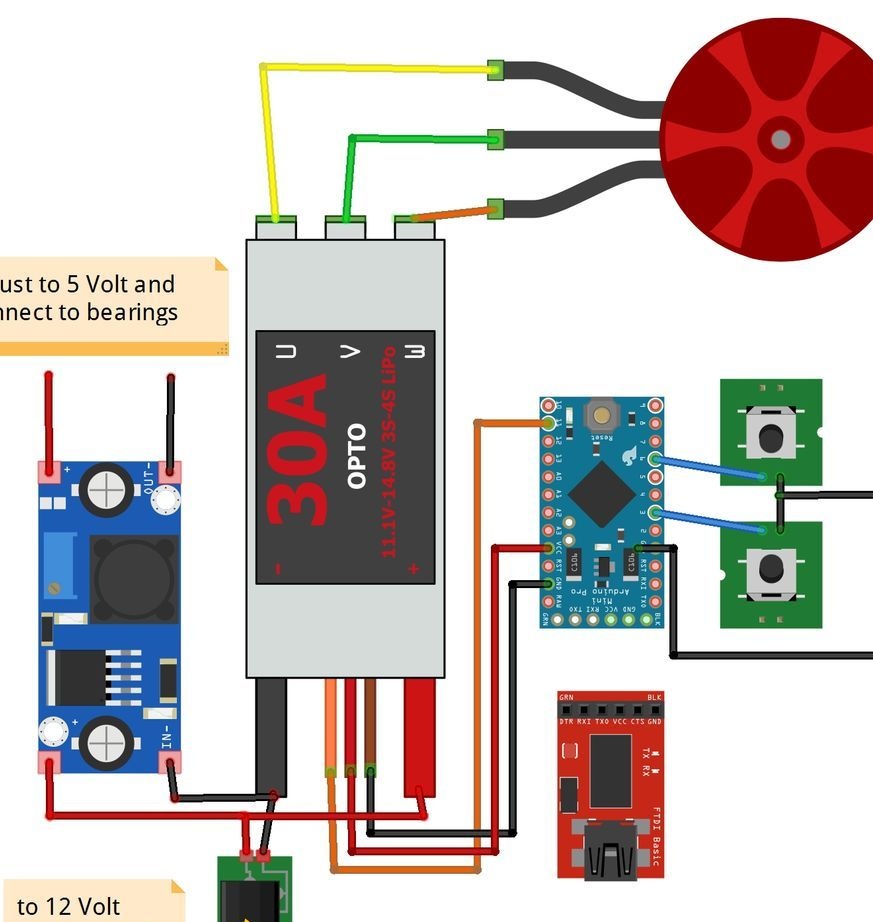
Do regulacji prędkości służą dwa przyciski na schemacie. Po włączeniu zasilania ESC otrzyma wartość 500 μs. Naciśnij jeden z przycisków, aby włączyć silnik. Szkic przyjmie wartość „StartPos = 625”. Później, po dostosowaniu prędkości, wartość tę można zmienić. Naciśnij przycisk przez dwie sekundy, a silnik powinien się zatrzymać.
Montaż konstrukcji rdzenia.
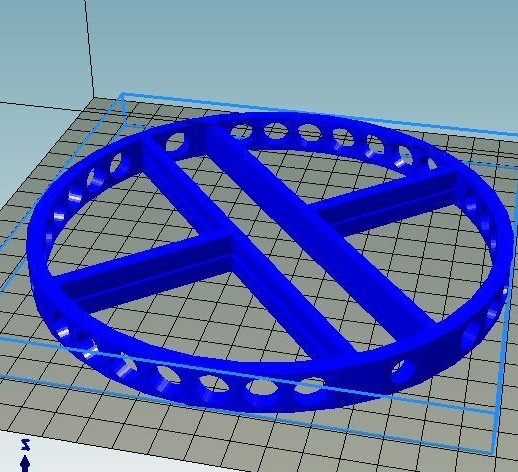

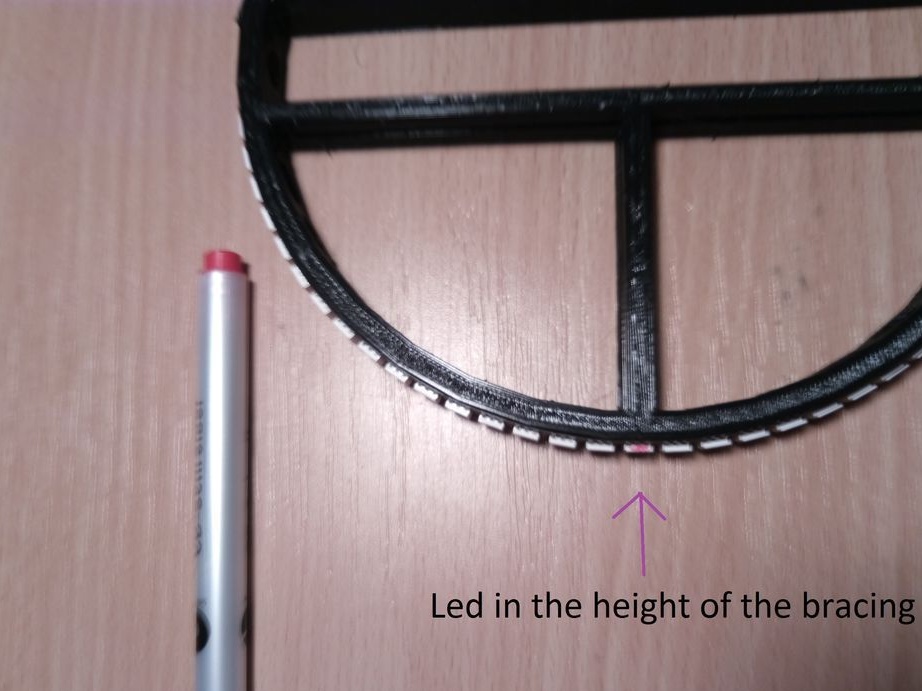
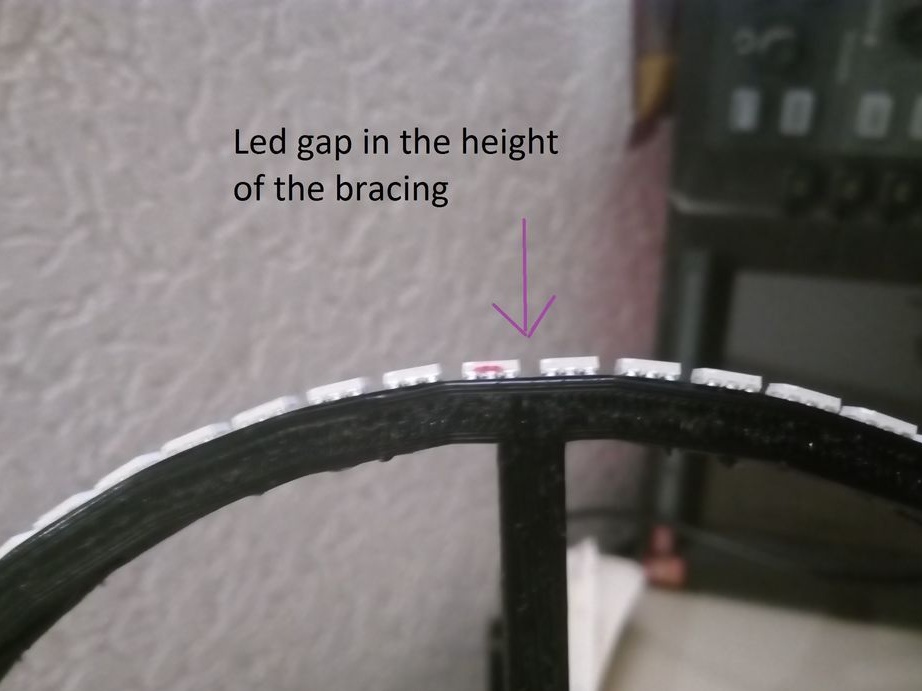


Aby to zrobić, wydrukuj sam pierścień z załączonego pliku. Autor wykonał w nim wiele otworów, aby zmniejszyć wagę. Możesz użyć kawałka rury PVC. Przecięte są dwa paski 32 diod LED. Dwa paski diod LED tworzą linie parzyste i nieparzyste. Ułóż taśmy tak, aby diody LED jednego paska były umieszczone między diodami LED drugiego, ale z tyłu. Po przymocowaniu taśmy można podłączyć diody LED płyty kontrolera. A następnie musisz zrównoważyć cały zespół.
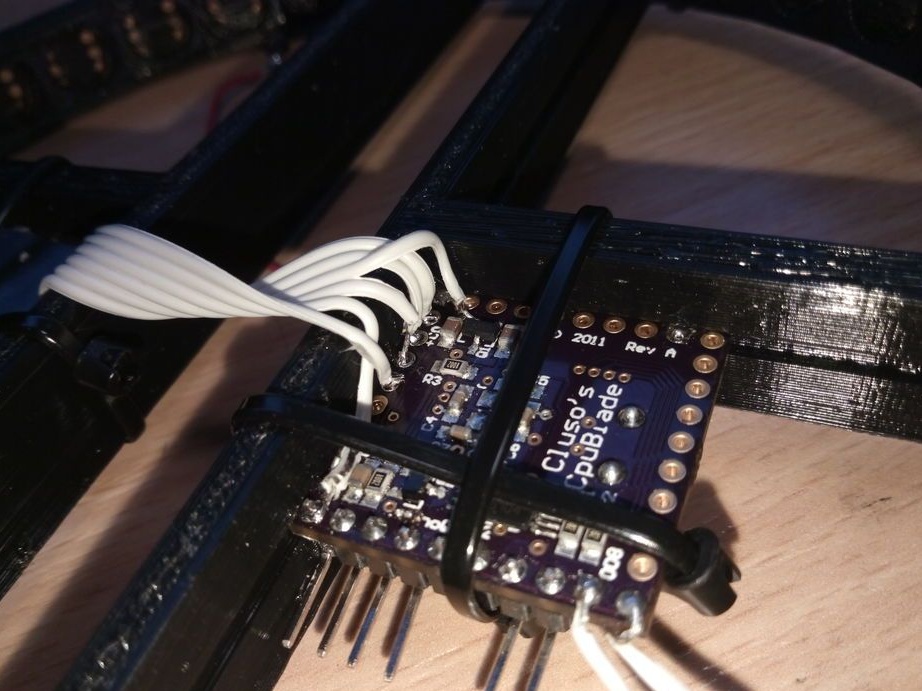
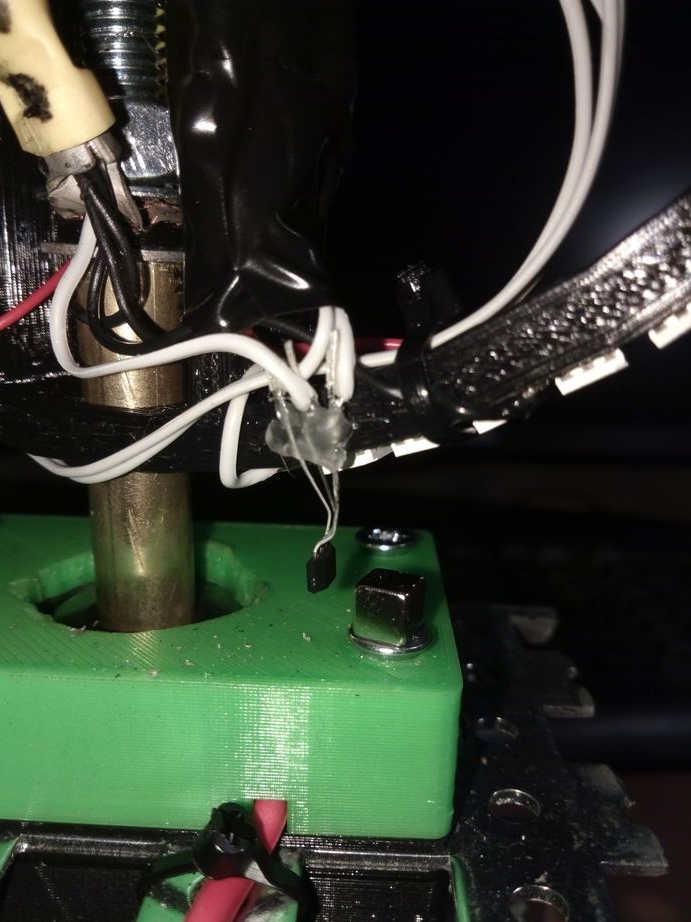
Poniższe zdjęcia pokazują, jak połączyć wszystkie elementy urządzenia razem. Zdjęcie pokazuje również zainstalowany czujnik Halla z magnesem.
Aby zaprogramować mikrokontroler Parallax Propeller, potrzebujesz
NIE podłączaj urządzenia do portu USB lub portu szeregowego, dopóki nie zainstalujesz oprogramowania. Więcej informacji na temat przesyłania oprogramowania do Parallax można znaleźć
Autor używa starszej, a zatem mniej ekonomicznej pod względem zużycia energii płyty MCU, ponieważ nie może znaleźć nowych bibliotek na nowych płytach kontrolera.
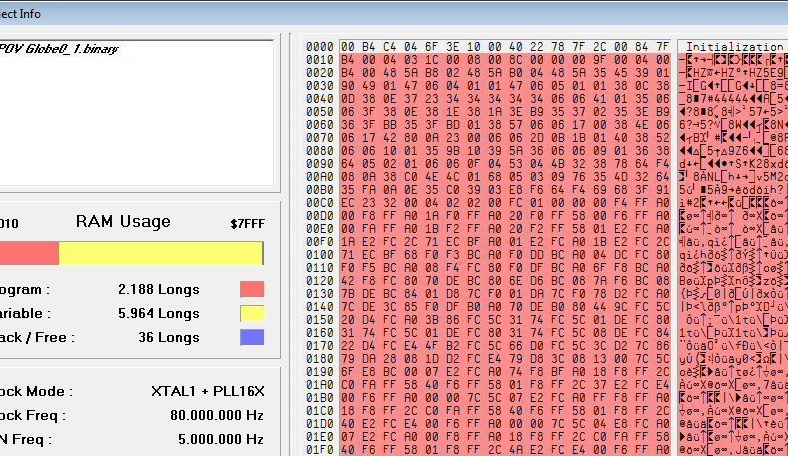
Po zebraniu i podłączeniu wszystkiego musisz zaprogramować kontroler. Autor robi to z pomocą. Pliki z oprogramowaniem w archiwum.
Teraz możesz spróbować uruchomić urządzenie. Od samego początku skopiuj zdjęcie testowe na kartę SD i wklej je do gniazda.
• Jeśli obrócisz pierścień ręcznie, diody LED powinny migać za każdym razem, gdy czujnik Halla mija magnes
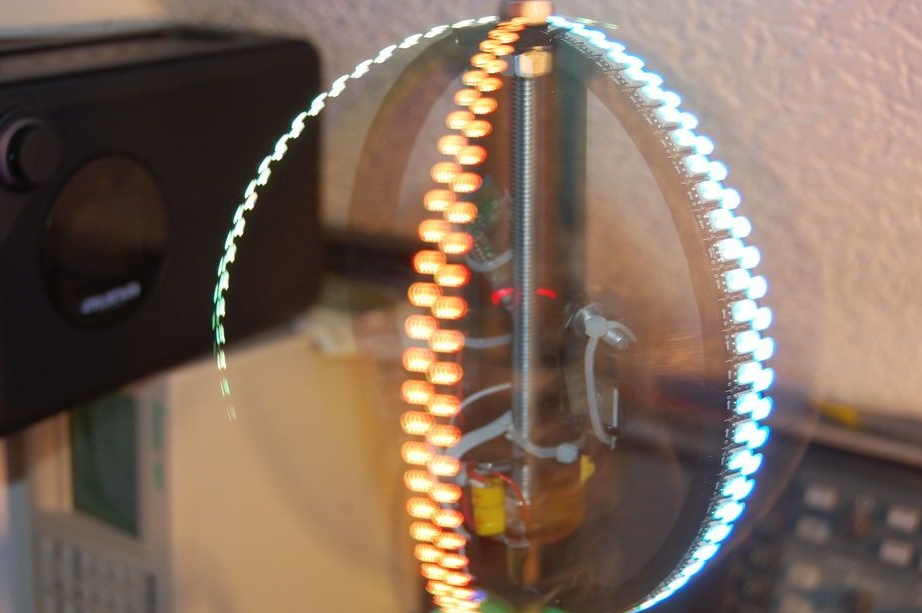
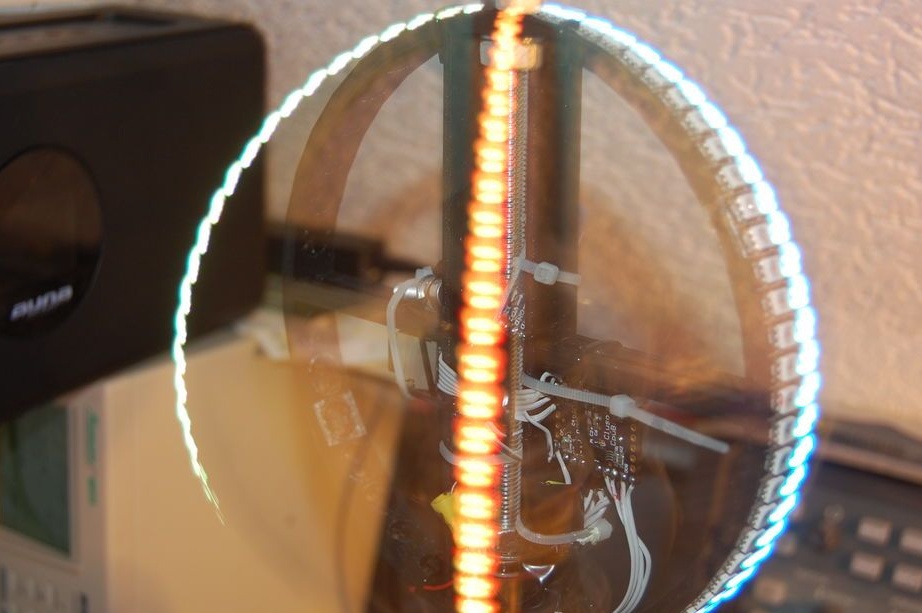
• Włącz silnik. Zwiększając prędkość za pomocą przycisków, należy upewnić się, że diody LED świecą, jak pokazano na 2 zdjęciach
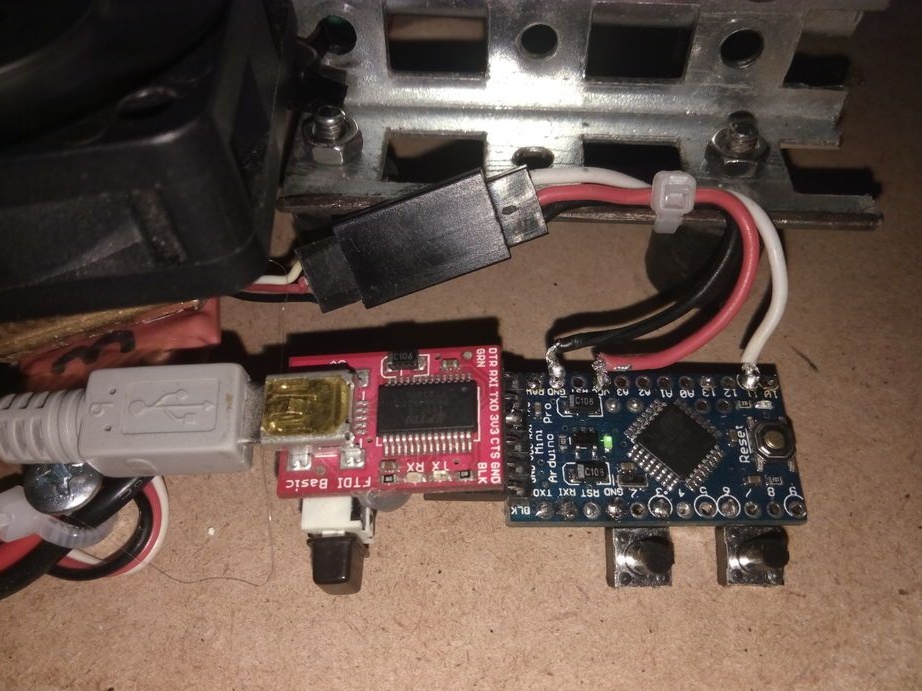
• Podłącz terminal Arduino do sterownika silnika.
• Zapamiętaj wyświetlaną wartość.
• Zatrzymaj silnik
• Zapisz poprzednio zapisaną wartość do zmiennej „startPos„szkic POV_MotorControl
• Zaprogramuj ponownie Arduino.
Następnym razem silnik natychmiast uruchomi się z odpowiednią prędkością. Teraz możesz „Wypełnić” na mapie dowolny obraz. Aby to zrobić, musisz zmienić rozmiar obrazu o 120 x 64 pikseli, obrócić obraz o 90 stopni w kierunku przeciwnym do ruchu wskazówek zegara i wykonać odbicie lustrzane w pionie. Zmniejsz jasność obrazu, ponieważ diody LED są bardzo jasne. Aby to zrobić, lepiej użyć korekcji gamma o współczynniku 0,45.
Zapisz obraz jako BPM 24 bity bez kompresji. Po wszystkich manipulacjach plik wyjściowy będzie miał rozmiar 23094 bajtów.



